JP2017173043A - 位置推定装置 - Google Patents
位置推定装置 Download PDFInfo
- Publication number
- JP2017173043A JP2017173043A JP2016057213A JP2016057213A JP2017173043A JP 2017173043 A JP2017173043 A JP 2017173043A JP 2016057213 A JP2016057213 A JP 2016057213A JP 2016057213 A JP2016057213 A JP 2016057213A JP 2017173043 A JP2017173043 A JP 2017173043A
- Authority
- JP
- Japan
- Prior art keywords
- estimated
- angular velocity
- error
- vehicle
- estimation unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Gyroscopes (AREA)
- Navigation (AREA)
Abstract
Description
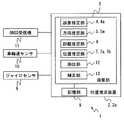
以下、本発明の第1の実施形態としての位置推定装置2を備える位置推定システム1を図面に基づいて説明する。位置推定システム1の構成を図1に沿って説明する。位置推定システム1は、位置推定装置2と、ジャイロセンサ9と、車輪速センサ10と、GNSS受信機11とを備えて構成される。
次に、第2実施形態を説明する。この第2実施形態以下の説明において、それまでに使用した符号と同一番号の符号を有する要素は、特に言及する場合を除き、それ以前の実施形態における同一符号の要素と同一である。また、構成の一部のみを説明している場合、構成の他の部分については先に説明した実施形態を適用できる。
次に、第3実施形態を説明する。第3実施形態における位置推定システム1bは、角速度誤差Ωが更新されると、直前の推定位置P(n−1)を、前回角速度誤差を更新した時点の推定位置P(n−a)を中心に回転させることによって補正する。
第1実施形態において、演算部3は、位置推定装置2の外部に備える車輪速センサ10およびジャイロセンサ9から車両の速度に応じた値および車両の方向の変化を取得するとしている。しかし、位置推定装置2が備えるセンサから車両の速度に応じた値と車両の方向の変化との少なくとも一つを取得するとしてもよい。例えば、位置推定装置2がジャイロセンサ9を備え、ジャイロセンサ9から取得した車両の方向の変化を用いて推定方向θおよび推定位置Pを求めるとしてもよい。
第1実施形態において、誤差推定部4が角速度誤差Ωを推定する所定のタイミングを、車両が停止後に再発進した時点とし、車両が停止している期間におけるジャイロセンサ9の出力を用いて角速度誤差Ωを算出するとしている。しかし、角速度誤差Ωを推定する所定のタイミングは、車両が停止後に再発進した時点に限られない。例えば、車両が停止した時点であってもよいし、車両の走行中の時点であってもよい。
また、第1実施形態において、補正部13が、測位部12が電波航法により測位した位置を用いて推定位置Pを補正するとしていたが、補正部13が行う推定位置Pの補正はこれに限られない。例えば、推定位置Pの軌跡を地図上の道路形状に照らし合わせるマップマッチングを行うことによって、推定方向θの補正を行うとしてもよい。マップマッチング前の推定位置Pの軌跡により定まる車両の進行方向と、マップマッチング後の推定位置Pの軌跡により定まる車両の進行方向との角度差が累積方向誤差ΔΘになる。累積方向誤差ΔΘを算出した以降の処理は変形例2と同じである。なお、この変形例3では、推定位置Pの軌跡と地図上の道路形状が、請求項の走行中方向情報である。この場合、角速度誤差Ωを推定する所定のタイミングを、マップマッチングを行う時点としてもよい。
第1実施形態において、位置推定装置2が作動している場合、常に推測航法による位置推定を行っているとしていたが、推測航法による位置推定を行う条件はこれに限られない。例えば、位置推定装置2が作動し、走行を開始した時点から推測航法による位置推定を開始するとしてもよい。また、位置推定装置2が作動し、かつ電波航法による位置推定を停止している場合に推測航法による位置推定を行うとしてもよい。
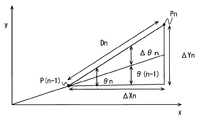
前述の実施形態では、前回角速度誤差Ωを更新した時点から前回推定方向を更新した時点まで、正しい角速度誤差がΩLで一定であるとしていた。これにより、正しい角速度誤差とΩOとの差である誤差差分ΔΩがΩL−ΩOで一定となり、ΔΘ(n−1)=ΔΩ×ΔTの関係となることから累積方向誤差ΔΘ(n−1)を算出していた。しかし、正しい角速度誤差を時間的に変化する関数としてもよい。たとえば、正しい角速度誤差が経過時間ΔTかけてΩOからΩLまで一次関数的に変化するとした場合には、誤差差分ΔΩが経過時間ΔTかけて0からΩL−ΩOまで一次関数的に変化する。この場合、累積方向誤差ΔΘ(n−1)は、経過時間ΔTかけて0からΩL−ΩOまで変化する誤差差分ΔΩの積分値となる。
Claims (5)
- 車両で用いられ、
ジャイロセンサ(9)を用いて逐次測定される角速度を用いて、前記車両の進行方向を逐次推定する方向推定部(5)と、
前記方向推定部で逐次推定する進行方向である推定方向を用いて前記車両の位置を逐次推定する位置推定部(7)とを備える位置推定装置であって、
所定のタイミングごとに、前記ジャイロセンサを用いて測定される角速度の実際の角速度に対する角速度誤差を推定する誤差推定部(4)を備え、
前記方向推定部は、前記誤差推定部で推定した前記角速度誤差の、前回推定した前記角速度誤差からの変化量をもとに、前記所定のタイミング以前に推定した前記推定方向を推定し直し、
前記位置推定部は、前記方向推定部で推定し直した前記推定方向を用いて、前記所定のタイミング以降の前記車両の位置を推定する位置推定装置。 - 請求項1において、
前記位置推定部は、前記位置を推定する際に、前記推定方向に加えて、前記車両の移動距離も用いて前記位置を推定し、
前記位置推定部が前記位置の推定に用いた、前記推定方向及び前記移動距離を逐次記憶する記憶部(8)をさらに備え、
前記方向推定部は、前記所定のタイミングに前記誤差推定部で前記角速度誤差を推定した場合に、前回の前記角速度誤差の推定以降に前記記憶部に累積して記憶された前記推定方向の各々について、前回推定した前記角速度誤差からの変化量をもとに、その推定方向を推定し直し、
前記位置推定部は、前記記憶部に累積して記憶された前記推定方向の各々について前記方向推定部で推定し直したそれらの推定方向と、前回の前記角速度誤差の推定以降に前記記憶部に累積して記憶された前記移動距離とを用いて、前回の前記角速度誤差の推定以降の前記車両の位置を推定し直した上で、以降の前記車両の位置を推定する位置推定装置。 - 請求項1において、
前記位置推定部は、前記所定のタイミングに前記誤差推定部で前記角速度誤差を推定した場合に、その所定のタイミング直前に推定していた前記車両の位置を、前回の前記角速度誤差の推定時における前記車両の位置を中心に、前回推定した前記角速度誤差からの変化量に応じて定まる角度だけ回転させることで推定し直した上で、以降の前記車両の位置を推定する位置推定装置。 - 請求項1〜3のいずれか1項において、
前記誤差推定部は、前記車両の停止時に前記ジャイロセンサで測定される角速度を用いて、前記角速度誤差を推定する位置推定装置。 - 請求項1〜4のいずれか1項において、
前記ジャイロセンサからの信号とは異なる情報であって、走行中に得られる前記車両の進行方向に関する情報である走行中方向情報を用いて、前記車両の走行中に前記車両の進行方向を逐次決定するとともに、当該進行方向を用いて前記推定方向を補正する補正部(13)をさらに備え、
前記誤差推定部は、前記車両の走行中に前記補正部で補正が行われるごとに、その補正における補正量をもとに、前記角速度誤差を推定する位置推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016057213A JP6620625B2 (ja) | 2016-03-22 | 2016-03-22 | 位置推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016057213A JP6620625B2 (ja) | 2016-03-22 | 2016-03-22 | 位置推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017173043A true JP2017173043A (ja) | 2017-09-28 |
| JP6620625B2 JP6620625B2 (ja) | 2019-12-18 |
Family
ID=59973807
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016057213A Active JP6620625B2 (ja) | 2016-03-22 | 2016-03-22 | 位置推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6620625B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112486158A (zh) * | 2019-09-11 | 2021-03-12 | 株式会社东芝 | 位置推定装置、移动体控制系统、位置推定方法以及程序 |
| CN115900697A (zh) * | 2022-10-28 | 2023-04-04 | 北京百度网讯科技有限公司 | 对象运动轨迹信息处理方法、电子设备以及自动驾驶车辆 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0642976A (ja) * | 1992-02-10 | 1994-02-18 | Sumitomo Electric Ind Ltd | ジャイロのオフセット補正装置 |
| JPH09152343A (ja) * | 1995-11-30 | 1997-06-10 | Fujitsu Ten Ltd | 車両位置検出装置 |
| JPH11295072A (ja) * | 1998-04-14 | 1999-10-29 | Japan Aviation Electronics Ind Ltd | 方位計 |
| US20050021229A1 (en) * | 2003-07-21 | 2005-01-27 | Lg Electronic Inc. | Apparatus and method for detecting vehicle location in navigation system |
| JP2012007937A (ja) * | 2010-06-23 | 2012-01-12 | Aisin Aw Co Ltd | 軌跡情報生成装置、方法およびプログラム |
| JP2012122819A (ja) * | 2010-12-08 | 2012-06-28 | Casio Comput Co Ltd | 測位装置、測位方法およびプログラム |
-
2016
- 2016-03-22 JP JP2016057213A patent/JP6620625B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0642976A (ja) * | 1992-02-10 | 1994-02-18 | Sumitomo Electric Ind Ltd | ジャイロのオフセット補正装置 |
| JPH09152343A (ja) * | 1995-11-30 | 1997-06-10 | Fujitsu Ten Ltd | 車両位置検出装置 |
| JPH11295072A (ja) * | 1998-04-14 | 1999-10-29 | Japan Aviation Electronics Ind Ltd | 方位計 |
| US20050021229A1 (en) * | 2003-07-21 | 2005-01-27 | Lg Electronic Inc. | Apparatus and method for detecting vehicle location in navigation system |
| JP2012007937A (ja) * | 2010-06-23 | 2012-01-12 | Aisin Aw Co Ltd | 軌跡情報生成装置、方法およびプログラム |
| JP2012122819A (ja) * | 2010-12-08 | 2012-06-28 | Casio Comput Co Ltd | 測位装置、測位方法およびプログラム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112486158A (zh) * | 2019-09-11 | 2021-03-12 | 株式会社东芝 | 位置推定装置、移动体控制系统、位置推定方法以及程序 |
| CN115900697A (zh) * | 2022-10-28 | 2023-04-04 | 北京百度网讯科技有限公司 | 对象运动轨迹信息处理方法、电子设备以及自动驾驶车辆 |
| CN115900697B (zh) * | 2022-10-28 | 2024-03-29 | 北京百度网讯科技有限公司 | 对象运动轨迹信息处理方法、电子设备以及自动驾驶车辆 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6620625B2 (ja) | 2019-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4780174B2 (ja) | 角速度センサ補正装置、角速度算出装置、角速度センサ補正方法、角速度算出方法 | |
| JP6260983B2 (ja) | 自己位置推定装置及び方法 | |
| JP4780168B2 (ja) | 角速度センサ補正装置および角速度センサ補正方法 | |
| JP6008124B2 (ja) | 車両方位検出方法および車両方位検出装置 | |
| JP6677533B2 (ja) | 車載装置、及び、推定方法 | |
| JP5842363B2 (ja) | 位置算出方法及び位置算出装置 | |
| CN109059913B (zh) | 一种用于车载导航系统的零延迟组合导航初始化方法 | |
| EP2270431A2 (en) | An inertial navigation system with error correction based on navigation map | |
| CN104457789A (zh) | 基于惯性导航的参数修正方法和装置 | |
| CN114019954A (zh) | 航向安装角标定方法、装置、计算机设备和存储介质 | |
| CN113566849A (zh) | 惯性测量单元的安装角度标定方法、装置和计算机设备 | |
| CN113566850A (zh) | 惯性测量单元的安装角度标定方法、装置和计算机设备 | |
| JP5273127B2 (ja) | 角速度センサ補正装置および角速度センサ補正方法 | |
| JP6620625B2 (ja) | 位置推定装置 | |
| JP6248559B2 (ja) | 車両用走行軌跡算出装置 | |
| CN103542864B (zh) | 一种惯性导航中计步的方法及装置 | |
| JP2012103023A (ja) | 角速度センサ補正装置および角速度センサ補正方法 | |
| JP6655129B2 (ja) | 自律走行装置 | |
| JP4831441B2 (ja) | 方位センサの補正係数演算装置及び演算プログラム | |
| CN115717886B (zh) | 一种匹配定位系统中异常匹配诊断处理方法及系统 | |
| JP6233127B2 (ja) | ジャイロセンサのオフセット補正装置、車両用ナビゲーション装置及びジャイロセンサのオフセット補正方法 | |
| JP6495609B2 (ja) | 方位検出装置および方位検出方法 | |
| JP2012058087A (ja) | 車両用現在位置検出装置 | |
| JP2007155364A (ja) | 方位センサの補正係数演算装置及び演算プログラム | |
| JP2007155365A (ja) | 方位センサの補正係数演算装置及び演算プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180605 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191105 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6620625 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |