JP2017176534A - 圧排子及び圧排装置 - Google Patents
圧排子及び圧排装置 Download PDFInfo
- Publication number
- JP2017176534A JP2017176534A JP2016069473A JP2016069473A JP2017176534A JP 2017176534 A JP2017176534 A JP 2017176534A JP 2016069473 A JP2016069473 A JP 2016069473A JP 2016069473 A JP2016069473 A JP 2016069473A JP 2017176534 A JP2017176534 A JP 2017176534A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- exclusion
- pressure value
- upper limit
- pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/02—Surgical instruments, devices or methods for holding wounds open, e.g. retractors; Tractors
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Abstract
【課題】圧排をより安全に行うという観点から、圧排子と人体の臓器との接触状態を検出することが強く求められていた。【解決手段】本開示によれば、人体の臓器を圧排する圧排部と、圧排部に設けられ、圧排部と人体の臓器との接触状態を検出する検出部と、を備える圧排子が提供される。本開示によれば、検出部によって圧排子と人体の臓器との接触状態を検出することができる。これにより、圧排をより安全に行うことができる。もちろん、本開示の効果はこれらに限定されない。【選択図】図1
Description
本開示は、圧排子及び圧排装置に関する。
例えば特許文献1に開示されるように、人体の手術を補助する器具として、圧排子が知られている。圧排子は、人体の臓器を圧排する器具である。このような圧排を行うことで、術野を展開すること等が可能となる。
しかし、特許文献1に開示された技術では、圧排子と人体の臓器との接触状態を検出することができなかった。
このため、圧排をより安全に行うという観点から、圧排子と人体の臓器との接触状態を検出することが強く求められていた。
本開示によれば、人体の臓器を圧排する圧排部と、圧排部に設けられ、圧排部と人体の臓器との接触状態を検出する検出部と、を備える圧排子が提供される。
本開示によれば、上記圧排子と、検出部が出力した出力値を解析する解析部と、を備える、圧排装置が提供される。
本開示によれば、検出部によって圧排子と人体の臓器との接触状態を検出することができる。
以上説明したように本開示によれば、圧排子と人体の臓器との接触状態を検出することができる。なお、上記の効果は必ずしも限定的なものではなく、上記の効果とともに、または上記の効果に代えて、本明細書に示されたいずれかの効果、または本明細書から把握され得る他の効果が奏されてもよい。
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
なお、説明は以下の順序で行うものとする。
1.第1の実施の形態
1−1.圧排装置の全体構成
1−2.圧排子の構成
1−3.圧力センサの詳細構成
1−4.圧力センサの他の例
1−5.圧力センサ以外のセンサの例
1−6.解析装置の構成
1−7.使用例
2.第2の実施形態
2−1.圧排装置の全体構成
2−2.解析装置の構成
2−3.アーム装置の構成
2−4.使用例
3.第3の実施形態
3−1.圧排装置の全体構成
3−2.解析装置の構成
3−3.アーム装置の構成
3−4.マスター装置の構成
3−5.使用例
1.第1の実施の形態
1−1.圧排装置の全体構成
1−2.圧排子の構成
1−3.圧力センサの詳細構成
1−4.圧力センサの他の例
1−5.圧力センサ以外のセンサの例
1−6.解析装置の構成
1−7.使用例
2.第2の実施形態
2−1.圧排装置の全体構成
2−2.解析装置の構成
2−3.アーム装置の構成
2−4.使用例
3.第3の実施形態
3−1.圧排装置の全体構成
3−2.解析装置の構成
3−3.アーム装置の構成
3−4.マスター装置の構成
3−5.使用例
<1.第1の実施形態>
(1−1.圧排装置の全体構成)
まず、図1に基づいて、第1の実施形態に係る圧排装置1の全体構成について説明する。圧排装置1は、圧排子10と、解析装置30と、表示装置50とを備える。圧排子10と解析装置30とは通信ケーブル2で接続されており、解析装置30と表示装置50とは通信ケーブル3で接続されている。もちろん、これらは無線接続されていても良い。
(1−1.圧排装置の全体構成)
まず、図1に基づいて、第1の実施形態に係る圧排装置1の全体構成について説明する。圧排装置1は、圧排子10と、解析装置30と、表示装置50とを備える。圧排子10と解析装置30とは通信ケーブル2で接続されており、解析装置30と表示装置50とは通信ケーブル3で接続されている。もちろん、これらは無線接続されていても良い。
(1−2.圧排子の構成)
つぎに、図1〜図3に基づいて、圧排子10の構成について説明する。圧排子10は、人体の臓器110(図10参照)を圧排するものであり、グリップ11と、シャフト12と、圧排部13と、圧力センサ20(検出部)とを備える。圧排子10の操作者(例えば術者の補助者)は、グリップ11を持って圧排子10を操作する。すなわち、第1の実施形態では、圧排子10は操作者によって直接操作される。
つぎに、図1〜図3に基づいて、圧排子10の構成について説明する。圧排子10は、人体の臓器110(図10参照)を圧排するものであり、グリップ11と、シャフト12と、圧排部13と、圧力センサ20(検出部)とを備える。圧排子10の操作者(例えば術者の補助者)は、グリップ11を持って圧排子10を操作する。すなわち、第1の実施形態では、圧排子10は操作者によって直接操作される。
シャフト12は、グリップ11の先端に設けられており、シャフト12の先端に圧排部13が設けられている。圧排部13は、患者の臓器110を圧排する部分である。圧排部13は、複数の圧排片15を備える。このように、圧排子10は、シャフト12の先端に設けられた複数の圧排片15によって患者の臓器110を圧排する。図1に示す例では、圧排片15の数は3つとなっているが、圧排片15の数はこれに限られない。
さらに、圧排子10の構成はこの例に限られない。すなわち、第1の実施形態(及び後述する第2〜第3の実施形態)は、あらゆる種類の圧排子に適用可能である。例えば、圧排子10は、バルーン型の圧排子であってもよく、シャフト12の先端にリング状の圧排部13が形成された圧排子であってもよい。また、圧排子10は、スネークリトラクタであってもよい。
図2に示すように、圧排片15は、圧排片15の骨格となる骨格部15aと、骨格部15aを覆う被覆部15bとを有する。骨格部15aは、例えば金属で構成され、被覆部15bは、可撓性を有する材料、例えばシリコン等で構成される。もちろん、圧排片15の構成はこの例に限られない。
また、各圧排片15には、圧力センサ20が設けられている。圧力センサ20は、圧排部13(より具体的には、圧排片15)と患者の臓器110との接触状態の一例として、圧排部13が患者の臓器110から受ける圧力を検出する。言い換えれば、圧力センサ20は、圧排部13が患者の臓器110に与える圧力を検出する。圧排部13が患者の臓器110に与える圧力は、圧排を安全に行うという観点から極めて重要である。圧力が大きすぎると、患者の臓器110に何らかの悪影響を与える可能性があるからである。したがって、圧排部13が患者の臓器110に与える圧力を適切な(すなわち、患者の臓器110に悪影響を及ぼさない)範囲内に留める必要がある。第1の実施形態では、圧力センサ20によって圧力を検出することができる。さらに、後述するように、表示装置50に圧力を表示する。したがって、操作者は、操作者の勘や経験等に頼らなくても、圧力を適切な範囲内に留めることができる。
なお、圧排部13から患者の臓器110に与える圧力を低減するという観点から、圧排片15の表面積を大きくしてもよい。ただし、この工夫だけでは不十分であるので、圧力センサ20を併用することが好ましい。
(1−3.圧力センサの詳細構成)
次に、図2及び図3に基づいて、圧力センサ20の詳細構成について説明する。圧力センサ20は、各圧排片15の長さ方向のほぼ全域にわたって設けられている。したがって、圧力センサ20は、圧排片15の長さ方向のほぼ全域での圧力を検出することができる。すなわち、圧力センサ20は、圧排片15と患者の臓器110との接触位置の違いによる圧力の変化、すなわち、圧力の分布を測定することができる。もちろん、圧力センサ20は圧排片15の一部だけに設けられてもよい。例えば、圧排片15のうち、もっとも患者の臓器110からの圧力を受けやすいところ(例えば、圧排片15の中心部分)だけに圧力センサ20を設けても良い。また、いずれかの圧排片15だけに圧力センサ20を設けても良い。ただし、圧力の分布を検出することで、より安全な圧排が可能となる。したがって、図2のように圧力センサ20が配置されていることが好ましい。
次に、図2及び図3に基づいて、圧力センサ20の詳細構成について説明する。圧力センサ20は、各圧排片15の長さ方向のほぼ全域にわたって設けられている。したがって、圧力センサ20は、圧排片15の長さ方向のほぼ全域での圧力を検出することができる。すなわち、圧力センサ20は、圧排片15と患者の臓器110との接触位置の違いによる圧力の変化、すなわち、圧力の分布を測定することができる。もちろん、圧力センサ20は圧排片15の一部だけに設けられてもよい。例えば、圧排片15のうち、もっとも患者の臓器110からの圧力を受けやすいところ(例えば、圧排片15の中心部分)だけに圧力センサ20を設けても良い。また、いずれかの圧排片15だけに圧力センサ20を設けても良い。ただし、圧力の分布を検出することで、より安全な圧排が可能となる。したがって、図2のように圧力センサ20が配置されていることが好ましい。
圧力センサ20は、具体的には、複数の歪センサ21と、各歪センサ21に対応する空洞部22とを備える。空洞部22は、歪センサ21のダイアフラムとして機能する部分であり、骨格部15a内に設けられている。空洞部22は、歪センサ21毎に存在することが好ましいが、必ずしもこの限りではない。歪センサ21は、圧排片15が患者の臓器110に接触することで生じる空洞部22の歪みを検出する。空洞部22の歪みは、圧排部13が患者の臓器110に与える圧力に相当する。したがって、歪センサ21は、圧排部13が患者の臓器110に与える圧力を検出する。歪センサ21の出力値は、通信ケーブル2を通って解析装置30に入力される。
(1−4.圧力センサの他の例)
圧力センサ20は、圧排部13が患者の臓器110に与える圧力を検出できるものであればよい。したがって、その構成は図2及び図3に示す例に限られない。そこで、つぎに、圧力センサ20の他の例について説明する。図4は、圧力センサ20の他の例を示す。この例では、圧力センサ20は、光ファイバ式の圧力センサ(例えば、FBG(Fiber Bragg Grating)センサ)となっており、圧排片15の骨格部15aに設けられている。圧力センサ20の出力値は、通信ケーブル2を通って解析装置30に入力される。例えば、FBGセンサを各圧排片15の複数箇所に設置することで、圧力分布の測定が可能である。
圧力センサ20は、圧排部13が患者の臓器110に与える圧力を検出できるものであればよい。したがって、その構成は図2及び図3に示す例に限られない。そこで、つぎに、圧力センサ20の他の例について説明する。図4は、圧力センサ20の他の例を示す。この例では、圧力センサ20は、光ファイバ式の圧力センサ(例えば、FBG(Fiber Bragg Grating)センサ)となっており、圧排片15の骨格部15aに設けられている。圧力センサ20の出力値は、通信ケーブル2を通って解析装置30に入力される。例えば、FBGセンサを各圧排片15の複数箇所に設置することで、圧力分布の測定が可能である。
図5及び図6は、圧力センサ20のさらに他の例を示す。図5に示す例では、圧力センサ20は、骨格部15aと被覆部15bとの間に配置された複数のバルーン24と、各バルーン24に空気を導入する空気導入管25と、空気導入管25の先端に設けられた空気圧センサ27とを備える。空気導入管25の後端には、図示しない空気導入装置が設けられる。つまり、この例では、図2に示す圧排子10とバルーン型の圧排子とを組み合わせた例と考えることもできる。なお、空気圧センサ27は、空気導入管25の後端側に設置されても良い。空気導入管25の先端側の空間より後端側の空間の方が広いことが多い。このため、空気圧センサ27を空気導入管25の後端側に設置する場合、空気圧センサ27を設置しやすくなることが多い。
バルーン24は、空気導入管25から供給された空気によって膨張し、患者の臓器110を圧排する。また、骨格部15aは中空構造となっており、空気導入管25は、骨格部15aの中空部分15cを通って各バルーン24に接続される。また、空気圧センサ27は、バルーン24が患者の臓器110に接触することにより生じたバルーン内圧力の変化を検出する。空気圧センサ27の出力値は、通信ケーブル2を通って解析装置30に入力される。図5及び図6の例では、複数のバルーン24が圧排片15の長さ方向のほぼ全域にわたって配列されていることから、図2に示す例と同様に、圧力の分布を測定することができる。以上、圧力センサ20の様々な例を列挙したが、圧力センサ20はこれらの例に限られないことはもちろんである。
(1−5.圧力センサ以外のセンサの例)
圧排部13と患者の臓器110との接触状態には、圧力以外にも様々な状態が考えられる。したがって、圧排部13には、圧力センサ20以外のセンサが設けられていても良い。このようなセンサとしてはバイオセンサが挙げられる。一例を図7に示す。図7に示す例では、圧力センサ20以外のセンサとして、パルスオキシメータ26が圧排片15に設けられている。パルスオキシメータ26は、SpO2、すなわち動脈血酸素飽和度を測定するものである。SpO2を測定することで、圧排による血流障害の有無を検出することができる。さらに他のセンサとして、血流センサ、温度センサ、酵素センサ等が挙げられる。すなわち、圧排部13には、圧排部13と患者の臓器110との接触状態を検出するセンサを任意に設けても良い。血流センサは、圧排による血流障害の有無を検出することができる。温度センサは、臓器110の温度を測定できる。圧排によって何らかの悪影響が臓器110に生じた場合、臓器110の温度変化が生じる可能性がある。温度センサは、このような温度変化を検出することができる。ここで、臓器110の温度は、深部体温の一例と考えることができる。深部体温としては、膀胱温、直腸温、食道温、血液温度、鼓膜温度等があるが、これらの温度は体外からアクセスしやすい箇所の温度である。本実施形態では、圧排部13に温度センサを設けることで、体外からアクセスしにくい箇所、すなわち臓器の温度を測定することができる。このような温度情報は、圧排を安全に行うという目的のみならず、手術中の様々な用途への使用が期待できる。また、酵素センサは、酵素を検出する。例えば、膵臓を圧排する場合、酵素センサとしてアミラーゼを検出可能なものを用いる。これにより、圧排により膵液が漏出した場合、酵素センサは、膵液の漏出を検出することができる。このように、圧力センサ20以外にも様々な種類のバイオセンサを設けることができる。複数種類のセンサを併用してもよい。
圧排部13と患者の臓器110との接触状態には、圧力以外にも様々な状態が考えられる。したがって、圧排部13には、圧力センサ20以外のセンサが設けられていても良い。このようなセンサとしてはバイオセンサが挙げられる。一例を図7に示す。図7に示す例では、圧力センサ20以外のセンサとして、パルスオキシメータ26が圧排片15に設けられている。パルスオキシメータ26は、SpO2、すなわち動脈血酸素飽和度を測定するものである。SpO2を測定することで、圧排による血流障害の有無を検出することができる。さらに他のセンサとして、血流センサ、温度センサ、酵素センサ等が挙げられる。すなわち、圧排部13には、圧排部13と患者の臓器110との接触状態を検出するセンサを任意に設けても良い。血流センサは、圧排による血流障害の有無を検出することができる。温度センサは、臓器110の温度を測定できる。圧排によって何らかの悪影響が臓器110に生じた場合、臓器110の温度変化が生じる可能性がある。温度センサは、このような温度変化を検出することができる。ここで、臓器110の温度は、深部体温の一例と考えることができる。深部体温としては、膀胱温、直腸温、食道温、血液温度、鼓膜温度等があるが、これらの温度は体外からアクセスしやすい箇所の温度である。本実施形態では、圧排部13に温度センサを設けることで、体外からアクセスしにくい箇所、すなわち臓器の温度を測定することができる。このような温度情報は、圧排を安全に行うという目的のみならず、手術中の様々な用途への使用が期待できる。また、酵素センサは、酵素を検出する。例えば、膵臓を圧排する場合、酵素センサとしてアミラーゼを検出可能なものを用いる。これにより、圧排により膵液が漏出した場合、酵素センサは、膵液の漏出を検出することができる。このように、圧力センサ20以外にも様々な種類のバイオセンサを設けることができる。複数種類のセンサを併用してもよい。
(1−6.解析装置の構成)
つぎに、図1及び図8に基づいて、解析装置30の構成について説明する。解析装置30は、解析部31及び記憶部32を備える。図1では、解析装置30は圧排子10と別構成となっているが、圧排子10と一体形成されていてもよい。
つぎに、図1及び図8に基づいて、解析装置30の構成について説明する。解析装置30は、解析部31及び記憶部32を備える。図1では、解析装置30は圧排子10と別構成となっているが、圧排子10と一体形成されていてもよい。
解析部31は、圧力センサ20から与えられた出力値を解析することで、圧排部13が患者の臓器110に与える圧力の具体的な値、すなわち圧力値を取得する。解析部31は、取得した圧力値を記憶部32に記憶させる。ここで、解析部31は、圧力値を記憶部32に蓄積してもよい。具体的には、解析部31は、圧排開始からの時間と圧力値との対応関係を示す圧力経時変化データを記憶部32に記憶させても良い。圧力経時変化データの一例を図9に示す。図9のグラフL2は、圧排開始からの時間と圧力値との対応関係を示す。
また、圧力センサ20が圧排部13の複数箇所に設けられている場合(例えば、図2に示す場合)、解析部31は、圧力値として圧力分布を取得することができる。解析部31は、圧力分布を記憶部32に記憶する。例えば、解析部31は、xy平面上に測定位置を示すプロットを配置し、このプロットの表示態様(色、大きさ等)を圧力値に応じて変化させてもよい。つまり、解析部31は、圧力分布マップを作成してもよい。さらに、解析部31は、この圧力分布についても、圧力経時変化データを作成してもよい。この場合、解析部31は、圧力センサ20の測定位置毎に図9に示すグラフL2を作成してもよい。また、解析部31は、圧力分布マップ中のプロットの表示態様を経時変化させてもよい。
記憶部32は、解析装置30の処理に必要な各種の情報、例えばプログラム等を記憶する。さらに、記憶部32は、解析部31による解析によって得られた圧力値を記憶する。記憶部32は、解析部31が圧力経時変化データあるいは圧力分布マップを作成した場合、これらのデータも記憶する。
さらに、記憶部32は、圧力値の上限値を記憶してもよい。すなわち、圧力値が大きすぎると、患者の臓器110に何らかの悪影響が生じる可能性がある。したがって、圧力値には上限値が存在しうる。上限値の決定方法は特に制限されないが、例えば以下の方法が挙げられる。すなわち、術者等は、術後の患者の経過を観察し、問題がなければ、記憶部32に記憶された圧力値を上限値としてもよい。また、術者等は、圧力値として圧力経時変化データが記憶部32に記憶されている場合、圧力経時変化データが示す圧力値を上限値としてもよい。この場合、上限値は、圧排開始からの時間に対応した値、すなわち上限経時変化データとして与えられる。上限経時変化データの一例を図9に示す。図9のグラフL1は、圧排開始からの時間と上限値との対応関係を示す。また、上限値は、患者の年齢、性別、体格、臓器110の種類等の要素に応じて変動しうる。そこで、術者等は、これらの要素毎に上限値を設定してもよい。また、術者等は、圧力値として圧力分布が与えられた場合、上限値の分布を示す上限分布マップを作成してもよい。上限値分布マップでは、例えば、xy平面状に測定位置を示すプロットが配置され、各プロットの表示態様が上限値に応じて異なる。
また、解析部31は、圧力値が上限値を超えた場合には、圧力値が上限値を超えた時点を記憶部32に記憶させてもよい。さらに、解析部31は、圧力値として圧力分布が与えられた場合には、圧力値が上限値を超えた位置を記憶部32に記憶させても良い。
解析部31は、記憶部32に記憶された圧力値及び上限値を表示装置50に表示する。具体的には、解析部31は、通信ケーブル3を介して圧力値及び上限値を示す画像情報を表示装置50に出力する。表示装置50は、与えられた画像情報を表示する。例えば、解析部31は、圧力経時変化データ及び上限経時変化データが記憶部32に記憶されている場合、これらを表示装置50に表示してもよい。より具体的には、解析部31は、図9に示すグラフL1、L2を重畳して表示してもよい。また、解析部31は、圧力分布マップ及び上限分布マップが記憶部32に記憶されている場合、これらを表示装置50に表示してもよい。これにより、圧排子10の操作者は、現在の圧力値が上限値を超えているかどうかを容易に判断することができる。
解析部31は、圧力値が上限値を超えていない場合であっても、圧力値の時間変化量が所定値を超えている場合(すなわち、圧力値が瞬間的に大きくなった場合)には、その旨を表示装置50に表示してもよい。この場合、圧排子10が勢い良く臓器110に当てられたことになる。したがって、仮に圧力値が小さくても、臓器110に何らかの悪影響が生じる可能性がある。また、解析部31は、圧力値の時間変化量が所定値を超えた時点を記憶部32に記憶させても良い。
また、解析部31は、圧力値及び上限値等の表示を手術中に行うが、任意のタイミング(例えば、術者等から要求があった場合等)に圧力値及び上限値等を表示装置50に表示してもよい。これにより、術者等は、手術結果の解析をより容易に行うことができる。
なお、解析部31は、記憶部32に記憶された圧力値及び上限値を他の態様で圧排子10の操作者に提示してもよい。例えば、解析部31は、音声により圧力値及び上限値を圧排子10の操作者に提示してもよい。この場合、解析装置30に音声出力装置(例えばスピーカ等)を接続させれば良い。解析部31は、圧力値及び上限値の数値を音声出力装置から読み上げるようにしてもよいし、圧力値が上限値を超えた場合にアラームを鳴らしても良い。また、解析部31は、振動等により圧力値及び上限値を術者や圧排子10の操作者等に提示してもよい。具体的には、解析部31は、圧力値が上限値を超えた場合、グリップ11を振動させても良い。この場合、グリップ11に振動装置を内蔵させれば良い。いずれの態様であっても、圧排子10の操作者は、現在の圧力値が上限値を超えているかどうかを容易に判断することができる。
また、圧排部13に他の種類のセンサを設けた場合、解析部31は、それらのセンサから与えられた出力値を解析してもよい。そして、解析部31は、解析により得られた値(例えば、上述したSpO2等)を表示装置50に表示してもよい。
解析装置30は、例えばCPU(Central Processing Unit)やDSP(Digital Signal Processor)等のプロセッサ、又はこれらのプロセッサが搭載されたマイコン等によって構成されうる。そして、プロセッサが所定のプログラムに従った信号処理を実行することにより、解析装置30の処理が実行される。
(1−7.使用例)
次に、図10に基づいて、圧排装置1の使用例を説明する。なお、この使用例では、圧排装置1を、低侵襲手術(具体的には、内視鏡手術)に使用する。具体的には、圧排子10の操作者は、患者の腹部の皮膚100にトロッカ60(円筒状の部材)を通す。これにより、皮膚100に開口が形成される。ついで、圧排子10の操作者は、トロッカ60を通して圧排子10を患者の体内に挿入する。その一方、別途内視鏡が患者の体内に挿入されており、その撮像画像が表示装置50に表示されている。内視鏡から与えられる撮像画像の処理は解析装置30により行われても良いし、他の制御装置によって行われても良い。圧排子10の操作者は、表示装置50に表示された撮像画像を参照しながら、圧排部13を圧排対象の臓器110に接触させる。その後、圧排子10の操作者は、圧排部13を用いて臓器110を圧排する。一方、圧力センサ20は、圧排部13が臓器110に与える圧力を検出する。そして、圧力センサ20は、圧力値に相当する出力値を解析装置30に出力する。解析部31は、出力値を解析することで、圧力値を取得する。解析部31は、取得した圧力値を記憶部32に記憶させるとともに、圧力値を表示装置50に表示する。解析部31は、上限値が記憶部32に記憶されている場合には、上限値も表示装置50に表示する。さらに、解析部31は、圧力経時変化データ及び上限経時変化データが記憶部32に記憶されている場合には、これらのデータを表示装置50に表示する。表示位置は特に制限されないが、内視鏡からの撮像画像の視認性を妨げないことが好ましい。そこで、圧力値等の表示位置は、表示装置50の表示面の端部等であることが好ましい。
次に、図10に基づいて、圧排装置1の使用例を説明する。なお、この使用例では、圧排装置1を、低侵襲手術(具体的には、内視鏡手術)に使用する。具体的には、圧排子10の操作者は、患者の腹部の皮膚100にトロッカ60(円筒状の部材)を通す。これにより、皮膚100に開口が形成される。ついで、圧排子10の操作者は、トロッカ60を通して圧排子10を患者の体内に挿入する。その一方、別途内視鏡が患者の体内に挿入されており、その撮像画像が表示装置50に表示されている。内視鏡から与えられる撮像画像の処理は解析装置30により行われても良いし、他の制御装置によって行われても良い。圧排子10の操作者は、表示装置50に表示された撮像画像を参照しながら、圧排部13を圧排対象の臓器110に接触させる。その後、圧排子10の操作者は、圧排部13を用いて臓器110を圧排する。一方、圧力センサ20は、圧排部13が臓器110に与える圧力を検出する。そして、圧力センサ20は、圧力値に相当する出力値を解析装置30に出力する。解析部31は、出力値を解析することで、圧力値を取得する。解析部31は、取得した圧力値を記憶部32に記憶させるとともに、圧力値を表示装置50に表示する。解析部31は、上限値が記憶部32に記憶されている場合には、上限値も表示装置50に表示する。さらに、解析部31は、圧力経時変化データ及び上限経時変化データが記憶部32に記憶されている場合には、これらのデータを表示装置50に表示する。表示位置は特に制限されないが、内視鏡からの撮像画像の視認性を妨げないことが好ましい。そこで、圧力値等の表示位置は、表示装置50の表示面の端部等であることが好ましい。
以上により、第1の実施形態によれば、圧力センサ20は、圧排部13から患者の臓器110に与える圧力を検出する。そして、解析部31は、圧力センサ20から与えられた出力値を解析することで、具体的な圧力値を取得する。そして、解析部31は、圧力値を表示装置50に表示する。したがって、圧排子10の操作者は、操作者の勘や経験等に頼らなくても、圧力を適切な範囲内に留めることができる。例えば、操作者は、圧力値が上限値に達する前に、圧力値が上限値に到達しそうかどうかを把握することができる。そして、操作者は、圧力値が実際に上限値に到達する前に、圧排を緩めることができる。したがって、操作者は、圧排をより安全に(言い換えれば、愛護的に)行うことができる。さらに、操作者が気づかないうちに臓器110に悪影響が与えられることをより確実に防止することができる。
さらに、解析部31は、圧力値を記憶部32に記憶する。解析部31は、圧力値の経時変化、分布を記憶部32に記憶させても良い。さらに、記憶部32には、圧力値の上限値が記憶される。したがって、術者等は、手術結果を解析するにあたり、記憶部32に記憶された情報を参照することができる。例えば、術者等は、圧力値が上限値を超えた時点が存在する場合、そのような時点を容易に把握することができる。つまり、術者等は、手術において改善すべき処理の種類(この場合には圧排の圧力が大きすぎたこと)、当該処理が生じた時点等を容易に把握することができる。
さらに、解析部31は、圧力値の他に上限値を表示する。より具体的には、解析部31は、圧力値と上限値とを対比して表示する。したがって、操作者は、現在の圧力値が上限値を超えていないかどうかをより容易に把握することができる。したがって、操作者は、圧排をより安全に行うことができる。
さらに、解析部31は、圧力値の変化を表示装置50に表示する。より具体的には、解析部31は、圧力値の経時変化、あるいは分布を表示装置50に表示する。これにより、操作者は、現在の圧力値が上限値を超えていないかどうかをより容易に把握することができる。したがって、操作者は、圧排をより安全に行うことができる。
<2.第2の実施形態>
(2−1.圧排装置の全体構成)
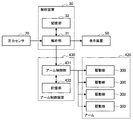
つぎに、第2の実施形態について説明する。まず、図11に基づいて、第2の実施形態に係る圧排装置1の全体構成について説明する。第2の実施形態に係る圧排装置1は、第1の実施形態に係る圧排装置1にアーム装置400を追加したものである。アーム装置400は、アーム420を備えており、アーム420の先端に圧排子10が取り付けられている。また、アーム装置400と解析装置30とは通信ケーブル4で接続されている。これらは無線接続されていてもよい。圧排子10の操作者は、アーム420を用いて、圧排子10を間接的に操作する。
(2−1.圧排装置の全体構成)
つぎに、第2の実施形態について説明する。まず、図11に基づいて、第2の実施形態に係る圧排装置1の全体構成について説明する。第2の実施形態に係る圧排装置1は、第1の実施形態に係る圧排装置1にアーム装置400を追加したものである。アーム装置400は、アーム420を備えており、アーム420の先端に圧排子10が取り付けられている。また、アーム装置400と解析装置30とは通信ケーブル4で接続されている。これらは無線接続されていてもよい。圧排子10の操作者は、アーム420を用いて、圧排子10を間接的に操作する。
(2−2.解析装置の構成)
つぎに、図12に基づいて、解析装置30の構成について説明する。解析装置30は、解析部31及び記憶部32を備える。解析部31及び記憶部32の機能は第1の実施形態と同様である。解析部31は、第1の実施形態の処理に加え、圧力値及び上限値をアーム制御部431に出力する処理を行う。
つぎに、図12に基づいて、解析装置30の構成について説明する。解析装置30は、解析部31及び記憶部32を備える。解析部31及び記憶部32の機能は第1の実施形態と同様である。解析部31は、第1の実施形態の処理に加え、圧力値及び上限値をアーム制御部431に出力する処理を行う。
(2−3.アーム装置の構成)
つぎに、図11及び図12に基づいて、アーム装置400の構成について説明する。アーム装置400は、アーム420及びアーム制御装置430を備える。
つぎに、図11及び図12に基づいて、アーム装置400の構成について説明する。アーム装置400は、アーム420及びアーム制御装置430を備える。
アーム420は、複数の関節部421a〜421dと、関節部421a〜421d同士を連結される複数のリンク422a〜422dとを有する。もちろん、関節部及びリンクの数は図11の例に限定されない。
リンク422a〜422dは棒状の部材である。リンク422aは、関節部421aと関節部421bとを連結する。ここで、関節部421aはアーム制御装置430に設けられる。また、リンク422bは、関節部421bと関節部421cとを連結する。リンク422cは、関節部421cと関節部421dとを連結する。リンク422dは、関節部421dに設けられている。リンク422dの先端には、圧排子10のグリップ11が固定される。
関節部421a〜421dの各々には、図12に示す駆動部300が内蔵されている。駆動部300は、例えば、アクチュエータ、トルクセンサ、エンコーダを備える。駆動部300は、さらにブレーキ機構を備えていることが好ましい。関節部421a〜421dは、アクチュエータが駆動されることによって、回転する。そして、関節部421a〜421dの先端側に接続されたリンクは、関節部の回転に連動して回転する。例えば、リンク422aは、関節部421aの回転に連動して回転する。関節部421a〜421dの回転方向は関節部421a〜421d毎に設定される。アクチュエータの動作はアーム制御装置430によって制御される。
トルクセンサは、アクチュエータの出力軸(すなわち、関節部421a〜421dを回転させる軸)に設けられている。トルクセンサは、アクチュエータから出力軸に与えられるトルクを検出することができる他、出力軸に外部から与えられた外力を検出することができる。ここで、外力としては、圧排子10の操作者がアーム420に加えた力、関節部421a〜421dの先端側に設けられたリンク等から与えられるトルク等が挙げられる。トルクセンサの出力値は、アーム制御部431に出力される。エンコーダは、出力軸の回転角度を測定する。エンコーダの出力値は、アーム制御部431に出力される。ブレーキ機構は、例えばアーム420の非通電時に出力軸の回転を停止させる。
アーム制御装置430は、アーム制御部431及び記憶部432を備える。アーム制御部431は、アーム420の動作を制御する。なお、アーム420の制御方式としては、アーム420の操作性を考慮して、好適に力制御が用いられる。具体的には、アーム制御部431は、圧排子10の操作者が直接アーム420に触れて力を加えた場合、アーム420に加えられた力の方向に当該アーム420を移動させる。具体的には、圧排子10の操作者が直接アーム420に触れて力を加えた場合、各関節部421a〜421dに内蔵されたトルクセンサの出力値が変動する。アーム制御部431は、各トルクセンサから与えられた出力値の変動に基づいて、操作者がアーム420に加えた力の方向、大きさを認識する。そして、アーム制御部431は、認識結果に基づいて、各駆動部300を制御する。これにより、アーム420は、アーム420に加えられた力の方向に移動する。
ここで、第2の実施形態では、圧排子10の圧力値及び上限値がアーム制御部431に与えられる。アーム制御部431は、これらの情報に基づいて、以下の処理を行う。
まず、アーム制御部431は、圧力値の上限値に基づいて、リンク422dが圧排子10に与える力の上限値(以下、この上限値を「アーム力上限値」とも称する)を算出する。例えば、アーム制御部431は、各圧排片15の片面の全面が臓器110に接触すると仮定して、アーム力上限値を算出してもよい。この場合、アーム力上限値は、圧力値の上限値に各圧排片15の片面の総面積を乗じることで得られる。もちろん、アーム力上限値の測定方法はこの例に限られない。
そして、アーム制御部431は、圧排子10の操作者から与えられる力に基づいてアーム420を駆動させる一方で、関節部421dのトルクセンサから与えられる出力値を監視する。そして、アーム制御部431は、トルクセンサからの出力値がアーム力上限値に達した場合には、それ以上同一方向にはアーム420を動かさない。具体的には、アーム制御部431は、圧排子10の操作者からさらに同一方向の力がアーム420に与えられた場合、逆方向の力をアーム420に発生させる。すなわち、アーム制御部431は、そのような力がアーム420に発生するように、各駆動部300を制御する。これにより、アーム制御部431は、圧力値が上限値に達したことを圧排子10の操作者に提示(この場合は、力覚提示)する。
このように、アーム制御部431は、関節部421dのトルクセンサが検出する外力とアーム力上限値とを対比する。すなわち、アーム制御部431は、関節部421dのトルクセンサが検出する外力に相当する力が、アーム420から臓器110に作用するとみなす。もちろん、アーム力上限値と対比されるパラメータはこの例に限られない。例えば、アーム制御部431は、関節部421b〜421dのトルクセンサから与えられる出力値に基づいて、これらのトルクセンサが検出する外力の合力を算出してもよい。そして、アーム制御部431は、当該合力とアーム力上限値とを対比してもよい。この場合、アーム制御部431は、関節部421b〜421dのトルクセンサが検出する外力の合力に相当する力が、アーム420から臓器110に作用するとみなす。
さらに、アーム制御部431は、アーム力上限値よりも小さい制御発動値を設定し、この制御発動値に基づいて以下の制御を行っても良い。なお、制御発動値の大きさは特に制限されないが、例えばアーム力上限値の60〜80%程度、より具体的には70%程度であっても良い。そして、アーム制御部431は、圧排子10の操作者から与えられる力に基づいてアーム420を駆動させる一方で、関節部421dのトルクセンサから与えられる出力値を監視する。なお、監視対象は上述した合力であってもよい。そして、アーム制御部431は、関節部421dのトルクセンサから与えられる出力値が制御発動値未満となる場合には、圧排子10の操作者から与えられる力に基づいてアーム420を駆動させる。一方、アーム制御部431は、関節部421dのトルクセンサから与えられる出力値が制御発動値以上となる場合には、(トルクセンサからの出力値−制御発動値)に比例した力を圧排子10の操作者による操作方向とは逆方向にアーム420に発生させる。すなわち、アーム制御部431は、そのような力がアーム420に発生するように、各駆動部300を制御する。当該逆方向の力は、(トルクセンサからの出力値−制御発動値)に比例した大きさでなくてもよい。例えば、アーム制御部431は、当該逆方向の力を急峻に発生させても良い。この場合、アーム制御部431は、圧排子10の圧力値が上限値に達する前に、アーム420に反発力を発生させることができる。
このように、アーム制御部431は、関節部421dのトルクセンサが検出する外力とアーム力上限値とを対比する。すなわち、アーム制御部431は、関節部421dのトルクセンサが検出する外力に相当する力が、アーム420から臓器110に作用するとみなす。もちろん、アーム力上限値と対比されるパラメータはこの例に限られない。例えば、アーム制御部431は、関節部421b〜421dのトルクセンサから与えられる出力値に基づいて、これらのトルクセンサが検出する外力の合力を算出してもよい。そして、アーム制御部431は、当該合力とアーム力上限値とを対比してもよい。この場合、アーム制御部431は、関節部421b〜421dのトルクセンサが検出する外力の合力に相当する力が、アーム420から臓器110に作用するとみなす。
さらに、アーム制御部431は、アーム力上限値よりも小さい制御発動値を設定し、この制御発動値に基づいて以下の制御を行っても良い。なお、制御発動値の大きさは特に制限されないが、例えばアーム力上限値の60〜80%程度、より具体的には70%程度であっても良い。そして、アーム制御部431は、圧排子10の操作者から与えられる力に基づいてアーム420を駆動させる一方で、関節部421dのトルクセンサから与えられる出力値を監視する。なお、監視対象は上述した合力であってもよい。そして、アーム制御部431は、関節部421dのトルクセンサから与えられる出力値が制御発動値未満となる場合には、圧排子10の操作者から与えられる力に基づいてアーム420を駆動させる。一方、アーム制御部431は、関節部421dのトルクセンサから与えられる出力値が制御発動値以上となる場合には、(トルクセンサからの出力値−制御発動値)に比例した力を圧排子10の操作者による操作方向とは逆方向にアーム420に発生させる。すなわち、アーム制御部431は、そのような力がアーム420に発生するように、各駆動部300を制御する。当該逆方向の力は、(トルクセンサからの出力値−制御発動値)に比例した大きさでなくてもよい。例えば、アーム制御部431は、当該逆方向の力を急峻に発生させても良い。この場合、アーム制御部431は、圧排子10の圧力値が上限値に達する前に、アーム420に反発力を発生させることができる。
これにより、圧排子10の操作者は、圧力値の上限値を意識することなく、アーム420を操作することができる。操作者は、アーム420から反発力が与えられた場合には、圧力値が上限値に達したと把握することができるからである。また、制御発動値を用いた制御が行われる場合、操作者は、圧排子10の圧力値が上限値に達する前に、反発力を認識することができる。さらに、操作者は、反発力を感じた後に、アーム420をさらに同一方向に操作した場合、より大きな反発力を受ける。このため、操作者は、圧力値が上限値に近づいていることをより確実に認識することができる。これにより、第2の実施形態では、圧力値が上限値を超えることをより確実に防止することができる。
さらに、アーム制御部431は、解析部31から与えられた圧力値が上限値に達したら、上記処理に関わらず、アーム420を緊急停止させてもよい。この際、アーム制御部431は、ブレーキ機構によりアーム420を固定することが好ましい。これにより、圧力値が上限値を超えることをより確実に防止することができる。
なお、アーム制御部431は、力制御に代えて位置制御を行っても良い。位置制御では、圧排子10の操作者は、何らかの方法(例えば、後述するマスター装置を用いた入力操作)により、アーム420の姿勢を指定する。そして、アーム制御部431は、アーム420の姿勢を操作者が指定した姿勢に一致させる。アーム420の姿勢は、各関節部421a〜421dに設けられたエンコーダからの出力値によって特定される。この場合、アーム制御部431は、圧排子10の位置に基づいて、上述した処理と同様の処理を行うことができる。すなわち、アーム制御部431は、圧排子10が臓器110に接触した後、圧排子10の臓器110側への変位量を測定する。ここで、圧排子10が臓器110に接触したことは、例えば、関節部421dのトルクセンサから与えられる出力値、圧排部13に設けられた圧力センサ20から与えられる出力値等に基づいて判定可能である。圧排子10が臓器110に接触した場合、トルクセンサからの出力値が変動するからである。そして、アーム制御部431は、臓器110にバネ・ダンパモデルを適用し(すなわち、臓器110を弾性体と仮定し)、バネ・ダンパモデルと、圧排子10の臓器110側への変位量とに基づいて、臓器110からの反発力を算出する。この反発力は、リンク422dが圧排子10に与える力に相当する。したがって、アーム制御部431は、臓器110からの反発力がアーム力上限値に達した場合には、それ以上同一方向にはアーム420を動かさないようにする。
記憶部432は、アーム制御装置430の動作に必要な情報、例えばプログラム等を記憶する。アーム制御装置430は、例えばCPU(Central Processing Unit)やDSP(Digital Signal Processor)等のプロセッサ、又はこれらのプロセッサが搭載されたマイコン等によって構成されうる。そして、プロセッサが所定のプログラムに従った信号処理及び制御処理を実行することにより、アーム制御装置430の処理が実行される。
(2−4.使用例)
次に、図11に基づいて、圧排装置1の使用例を説明する。この使用例でも、第1の実施形態と同様に、圧排装置1を低侵襲手術に使用する。ただし、圧排子10の操作者は、アーム420を用いて圧排子10を操作する。具体的には、圧排子10の操作者は、患者の腹部の皮膚100にトロッカ60(円筒状の部材)を通す。これにより、皮膚100に開口が形成される。ついで、圧排子10の操作者は、アーム420を操作することで圧排子10をトロッカ60近傍まで移動させる。ついで、操作者は、トロッカ60を通して圧排子10を患者の体内に挿入する。
次に、図11に基づいて、圧排装置1の使用例を説明する。この使用例でも、第1の実施形態と同様に、圧排装置1を低侵襲手術に使用する。ただし、圧排子10の操作者は、アーム420を用いて圧排子10を操作する。具体的には、圧排子10の操作者は、患者の腹部の皮膚100にトロッカ60(円筒状の部材)を通す。これにより、皮膚100に開口が形成される。ついで、圧排子10の操作者は、アーム420を操作することで圧排子10をトロッカ60近傍まで移動させる。ついで、操作者は、トロッカ60を通して圧排子10を患者の体内に挿入する。
圧排子10の操作者は、表示装置50に表示された撮像画像を参照しながら、圧排部13を圧排対象の臓器110に接触させる。その後、圧排子10の操作者は、圧排部13を用いて臓器110を圧排する。一方、圧力センサ20は、圧排部13が臓器110に与えある圧力を検出する。そして、圧力センサ20は、圧力値に相当する出力値を解析装置30に出力する。その後の解析部31は、第1の実施形態と同様の処理を行う。例えば、解析部31は、圧力値及び上限値を表示装置50に表示させる。さらに、解析部31は、圧力値及び上限値をアーム制御部431に出力する。
そして、アーム制御部431は、圧排子10の操作者による操作に応じてアーム420を駆動させる一方で、関節部421dのトルクセンサから与えられる出力値を監視する。そして、アーム制御部431は、トルクセンサからの出力値がアーム力上限値に達した場合には、それ以上同一方向にはアーム420を動かさない。具体的には、アーム制御部431は、圧排子10の操作者からさらに同一方向の力がアーム420に与えられた場合、逆方向の力をアーム420に発生させる。すなわち、アーム制御部431は、そのような力がアーム420に発生するように、各駆動部300を制御する。すなわち、アーム制御部431は、圧力値が上限値に達したことを圧排子10の操作者に提示(この場合は、力覚提示)する。したがって、操作者は、圧力値の上限値を意識することなく、アーム420を操作することができる。
第2の実施形態によれば、圧排装置1は、アーム420を備える。したがって、圧排子10の操作者は、アーム420を操作することで、圧排子10を間接的に操作することができる。
さらに、アーム制御部431は、圧力値及び上限値に基づいて、アーム420を制御する。具体的には、アーム制御部431は、圧力値が上限値以下になるように、アーム420を制御する。したがって、圧力値が上限値を超えることをより確実に防止することができる。さらに、アーム制御部431は、圧力値が上限値に達した場合には、アーム420を介してその旨を操作者に提示する。具体的には、アーム制御部431は、アーム420に反発力を発生させることで、力覚提示を行う。これにより、操作者は、圧力値の上限値を意識することなく、アーム420を操作することができる。さらに、表示装置50には、第1の実施形態と同様の内容が表示される。したがって、操作者は、圧排をより安全に行うことができる。
<3.第3の実施形態>
(3−1.圧排装置の全体構成)
つぎに、第3の実施形態について説明する。まず、図13に基づいて、第3の実施形態に係る圧排装置1の全体構成について説明する。第3の実施形態に係る圧排装置1は、第2の実施形態に係る圧排装置1にマスター装置500を追加したものである。マスター装置500とアーム制御装置430とは、通信ケーブル5で接続されている。これらは無線接続されていてもよい。マスター装置500は、アーム420の操作に使用される。すなわち、圧排子10の操作者Uは、アーム420に触れることでアーム420を直接操作してもよいし、マスター装置500を用いてアーム420を間接的に操作してもよい。
(3−1.圧排装置の全体構成)
つぎに、第3の実施形態について説明する。まず、図13に基づいて、第3の実施形態に係る圧排装置1の全体構成について説明する。第3の実施形態に係る圧排装置1は、第2の実施形態に係る圧排装置1にマスター装置500を追加したものである。マスター装置500とアーム制御装置430とは、通信ケーブル5で接続されている。これらは無線接続されていてもよい。マスター装置500は、アーム420の操作に使用される。すなわち、圧排子10の操作者Uは、アーム420に触れることでアーム420を直接操作してもよいし、マスター装置500を用いてアーム420を間接的に操作してもよい。
(3−2.解析装置の構成)
つぎに、図14に基づいて、解析装置30の構成について説明する。解析装置30は、解析部31及び記憶部32を備える。解析部31及び記憶部32の機能は第2の実施形態と同様である。なお、解析部31は、圧力値及び上限値をマスター制御部511に出力してもよい。
つぎに、図14に基づいて、解析装置30の構成について説明する。解析装置30は、解析部31及び記憶部32を備える。解析部31及び記憶部32の機能は第2の実施形態と同様である。なお、解析部31は、圧力値及び上限値をマスター制御部511に出力してもよい。
(3−3.アーム装置の構成)
つぎに、図13及び図14に基づいて、アーム装置400の構成について説明する。アーム装置400は、アーム420及びアーム制御装置430を備える。アーム420及びアーム制御装置430の構成及び機能は第2の実施形態と同様である。さらに、アーム制御部431は、以下の処理を行うことが可能である。
つぎに、図13及び図14に基づいて、アーム装置400の構成について説明する。アーム装置400は、アーム420及びアーム制御装置430を備える。アーム420及びアーム制御装置430の構成及び機能は第2の実施形態と同様である。さらに、アーム制御部431は、以下の処理を行うことが可能である。
すなわち、アーム制御部431は、マスター制御部511から与えられた操作情報に基づいて、アーム420を制御する。制御方式は力制御であっても、位置制御であってもよい。力制御の場合、操作情報は、圧排子10の操作者が入力操作用アーム520に加えた力の大きさ及び方向に関する情報を含む。位置制御の場合、入力操作用アーム520の姿勢に関する情報を含む。
さらに、アーム制御部431は、圧力値が上限値に達した場合には、それ以上同一方向にはアーム420を動かさない。さらに、アーム制御部431は、圧力値が上限値に達した旨を操作者に提示することを指示する提示指示情報をマスター制御部511に出力する。
(3−4.マスター装置の構成)
つぎに、図13及び図14に基づいて、マスター装置500の構成について説明する。マスター装置500は、入力操作用アーム520及びマスター制御装置510を備える。
つぎに、図13及び図14に基づいて、マスター装置500の構成について説明する。マスター装置500は、入力操作用アーム520及びマスター制御装置510を備える。
入力操作用アーム520は、複数の関節部521a〜521dと、関節部521a〜521d同士を連結される複数のリンク522a〜522dとを有する。もちろん、関節部及びリンクの数は図13の例に限定されない。すなわち、入力操作用アーム520は、アーム420を縮小させた形状を有している。したがって、関節部521a〜521d及びリンク522a〜522dの機能は、関節部421a〜421d及びリンク422a〜422dとほぼ同様である。
すなわち、リンク522a〜522dは棒状の部材である。リンク522aは、関節部521aと関節部521bとを連結する。ここで、関節部521aはマスター制御装置510に設けられる。また、リンク522bは、関節部521bと関節部521cとを連結する。リンク522cは、関節部521cと関節部521dとを連結する。リンク522dは、関節部521dに設けられている。
関節部521a〜521dの各々には、図14に示す操作駆動部600が内蔵されている。操作駆動部600は、例えばアクチュエータ、トルクセンサ、エンコーダを備える。関節部521a〜521dは、アクチュエータが駆動されることによって、回転する。そして、関節部521a〜521dの先端側に接続されたリンクは、関節部の回転に連動して回転する。例えば、リンク522aは、関節部521aの回転に連動して回転する。関節部521a〜521dの回転方向は関節部421a〜421dに対応する。アクチュエータの動作はマスター制御部511によって制御される。
トルクセンサは、アクチュエータの出力軸(すなわち、関節部521a〜521dを回転させる軸)に設けられている。トルクセンサは、アクチュエータから出力軸に与えられるトルクを検出することができる他、出力軸に外部から与えられた外力を検出することができる。ここで、外力としては、圧排子10の操作者が入力操作用アーム520に加えた力、関節部521a〜521dの先端側に設けられたリンク等から与えられるトルク等が挙げられる。トルクセンサの出力値は、マスター制御部511に出力される。エンコーダは、出力軸の回転角度を測定する。エンコーダの出力値は、マスター制御部511に出力される。また、関節部521a〜521dには、アーム420と同様のブレーキ機構が設けられていてもよい。
マスター制御装置510は、マスター制御部511及び記憶部512を備える。マスター制御部511は、入力操作用アーム520の動作を制御する。なお、入力操作用アーム520の制御方式としては、好適に力制御が用いられる。具体的には、マスター制御部511は、圧排子10の操作者が入力操作用アーム520に触れて力を加えた場合、入力操作用アーム520に加えられた力の方向に当該入力操作用アーム520を移動させる。具体的な制御方法はアーム装置400と同様である。さらに、マスター制御部511は、操作者が入力操作用アーム520に加えた力の大きさ及び方向に関する操作情報を生成し、アーム制御部431に出力する。これにより、アーム制御部431は、アーム420を力制御することができる。
なお、マスター制御部511は、操作情報として、入力操作用アーム520の姿勢(より具体的には、関節部521a〜521d内のエンコーダの値)をアーム制御部431に出力してもよい。この場合、アーム制御部431は、アーム420を位置制御することができる。
さらに、マスター制御部511は、アーム制御部431から提示指示情報が与えられた場合、圧力値が上限値に達したことを、入力操作用アーム520を介して操作者に提示する。これにより、アーム制御部431は、圧力値が上限値に達したことを、入力操作用アーム520を介して操作者に提示することができる。例えば、マスター制御部511は、操作駆動部600を制御することで、入力操作用アーム520を振動させる。すなわち、マスター制御部511は、圧力値が上限値に達したことを圧排子10の操作者に提示(この場合は、力覚提示)する。なお、アーム420と同様に、操作方向と逆方向の力を入力操作用アーム520に発生させても良い。
これにより、圧排子10の操作者は、圧力値の上限値を意識することなく、アーム420を操作することができる。操作者は、入力操作用アーム520が振動した場合、あるいは、入力操作用アーム520から逆方向の力(すなわち、反発力)を受けた場合には、圧力値が上限値に達したと把握することができるからである。これにより、第3の実施形態では、圧力値が上限値を超えることをより確実に防止することができる。
さらに、マスター制御部511は、解析部31から与えられた圧力値が上限値に達したら、アーム制御部431から提示指示情報が当たられたか否かに関わらず、入力操作用アーム520を振動させてもよい。これにより、圧力値が上限値を超えることをより確実に防止することができる。
記憶部512は、マスター制御装置510の動作に必要な情報、例えばプログラム等を記憶する。マスター制御装置510は、例えばCPU(Central Processing Unit)やDSP(Digital Signal Processor)等のプロセッサ、又はこれらのプロセッサが搭載されたマイコン等によって構成されうる。そして、プロセッサが所定のプログラムに従った信号処理及び制御処理を実行することにより、マスター制御装置510の処理が実行される。
なお、マスター装置500の構成は図13及び図14の例に限定されない。マスター装置500は、アーム420を操作できるものであればどのようなものであっても良い。例えば、マスター装置500は、操作レバーを有するものであっても良い。また、入力操作用アーム520は操作駆動部600を有していなくてもよい。この場合、入力操作用アーム520は、その姿勢に関する情報を出力でき、かつ、なんらかの駆動(上述した振動等)ができればよい。すなわち、関節部521a〜521dはエンコーダ及び何らかの駆動装置(例えば、振動が可能な駆動装置)を有していればよい。この場合、マスター制御部511は、操作情報として入力操作用アーム520の姿勢に関する情報をアーム制御部431に出力する。
(3−5.使用例)
次に、図13に基づいて、圧排装置1の使用例を説明する。この使用例でも、第1の実施形態と同様に、圧排装置1を低侵襲手術に使用する。ただし、圧排子10の操作者は、アーム420を用いて圧排子10を操作する。操作者は、アーム420を触れることでアーム420を直接操作してもよいし、マスター装置500を用いてアーム420を間接的に操作してもよい。具体的には、圧排子10の操作者は、患者の腹部の皮膚100にトロッカ60(円筒状の部材)を通す。これにより、皮膚100に開口が形成される。ついで、圧排子10の操作者は、アーム420を操作することで圧排子10をトロッカ60近傍まで移動させる。ついで、操作者は、トロッカ60を通して圧排子10を患者の体内に挿入する。
次に、図13に基づいて、圧排装置1の使用例を説明する。この使用例でも、第1の実施形態と同様に、圧排装置1を低侵襲手術に使用する。ただし、圧排子10の操作者は、アーム420を用いて圧排子10を操作する。操作者は、アーム420を触れることでアーム420を直接操作してもよいし、マスター装置500を用いてアーム420を間接的に操作してもよい。具体的には、圧排子10の操作者は、患者の腹部の皮膚100にトロッカ60(円筒状の部材)を通す。これにより、皮膚100に開口が形成される。ついで、圧排子10の操作者は、アーム420を操作することで圧排子10をトロッカ60近傍まで移動させる。ついで、操作者は、トロッカ60を通して圧排子10を患者の体内に挿入する。
圧排子10の操作者は、表示装置50に表示された撮像画像を参照しながら、圧排部13を圧排対象の臓器110に接触させる。その後、圧排子10の操作者は、圧排部13を用いて臓器110を圧排する。一方、圧力センサ20は、圧排部13が臓器110に与えある圧力を検出する。そして、圧力センサ20は、圧力値に相当する出力値を解析装置30に出力する。その後の解析部31は、第2の実施形態と同様の処理を行う。例えば、解析部31は、圧力値及び上限値を表示装置50に表示させる。さらに、解析部31は、圧力値及び上限値をアーム制御部431に出力する。
そして、アーム制御部431は、圧排子10の操作者による操作に応じてアーム420を駆動させる。この操作は、上述したように、アーム420に対して直接行われる場合もあるし、マスター装置500を用いて間接的に行われる場合もある。マスター装置500が用いられる場合、マスター装置500は、操作情報をアーム制御部431に出力する。アーム制御部431は、この一方で、関節部421dのトルクセンサから与えられる出力値を監視する。そして、アーム制御部431は、トルクセンサからの出力値がアーム力上限値に達した場合には、それ以上同一方向にはアーム420を動かさない。さらに、アーム制御部431は、提示指示情報をマスター制御部511に出力する。マスター制御部511は、提示指示情報が与えられた場合、入力操作用アーム520を振動させる。なお、アーム420が直接操作される場合もあるので、アーム制御部431は、第2の実施形態と同様に、アーム420に反発力を発生させても良い。したがって、操作者は、圧力値の上限値を意識することなく、アーム420を操作することができる。
第3の実施形態によれば、アーム制御部431は、マスター制御部511から与えられた操作情報に基づいて、アーム420を制御する。さらに、アーム制御部431は、圧力値が上限値に到達したことを、入力操作用アーム520を介して提示することができる。これにより、操作者は、圧力値の上限値を意識することなく、アーム420を操作することができる。さらに、表示装置50には、第1の実施形態と同様の内容が表示される。したがって、操作者は、圧排をより安全に行うことができる。
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
また、本明細書に記載された効果は、あくまで説明的または例示的なものであって限定的ではない。つまり、本開示に係る技術は、上記の効果とともに、または上記の効果に代えて、本明細書の記載から当業者には明らかな他の効果を奏しうる。
なお、以下のような構成も本開示の技術的範囲に属する。
(1)
人体の臓器を圧排する圧排部と、
前記圧排部に設けられ、前記圧排部と前記人体の臓器との接触状態を検出する検出部と、を備える圧排子。
(2)
前記検出部は、前記接触状態として、前記圧排部が前記人体の臓器から受ける圧力を検出する、前記(1)記載の圧排子。
(3)
前記(2)記載の圧排子と、
前記検出部が出力した出力値を解析する解析部と、を備える、圧排装置。
(4)
前記解析部は、前記解析によって得られた圧力値を提示する制御を行う、前記(3)記載の圧排装置。
(5)
前記解析部は、前記圧力値の上限値を提示する制御を行う、前記(4)記載の圧排装置。
(6)
前記解析部は、前記圧力値と前記圧力値の上限値とを対比して提示する制御を行う、前記(5)記載の圧排装置。
(7)
前記解析部は、前記解析によって得られた圧力値の変化を提示する制御を行う、前記(4)〜(6)の何れか1項に記載の圧排装置。
(8)
前記解析部は、前記圧力値の経時変化を提示する制御を行う、前記(7)記載の圧排装置。
(9)
前記解析部は、前記圧力値の分布を提示する制御を行う、前記(7)または(8)に記載の圧排装置。
(10)
前記解析によって得られた圧力値を記憶する記憶部をさらに備える、前記(3)〜(9)の何れか1項に記載の圧排装置。
(11)
前記圧排子を保持するアームを備える、前記(3)〜(10)の何れか1項に記載の圧排装置。
(12)
前記解析部による解析により得られた圧力値に基づいて、前記アームを制御する制御部を備える、前記(11)記載の圧排装置。
(13)
前記制御部は、前記圧力値が前記圧力値の上限値以下となるように、前記アームを制御する、前記(12)記載の圧排装置。
(14)
前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記圧力値が前記圧力値の上限値に到達したことを、前記アームを介して提示する、前記(13)記載の圧排装置。
(15)
前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記アームを停止するよう制御する、前記(13)または(14)記載の圧排装置。
(16)
前記制御部は、入力操作部から与えられた操作情報に基づいて、前記アームを制御する、前記(12)〜(15)の何れか1項に記載の圧排装置。
(17)
前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記圧力値が前記圧力値の上限値に到達したことを、前記入力操作部を介して提示する、前記(16)記載の圧排装置。
(18)
前記制御部は、前記アームを力制御する、前記(12)〜(17)の何れか1項に記載の圧排装置。
(1)
人体の臓器を圧排する圧排部と、
前記圧排部に設けられ、前記圧排部と前記人体の臓器との接触状態を検出する検出部と、を備える圧排子。
(2)
前記検出部は、前記接触状態として、前記圧排部が前記人体の臓器から受ける圧力を検出する、前記(1)記載の圧排子。
(3)
前記(2)記載の圧排子と、
前記検出部が出力した出力値を解析する解析部と、を備える、圧排装置。
(4)
前記解析部は、前記解析によって得られた圧力値を提示する制御を行う、前記(3)記載の圧排装置。
(5)
前記解析部は、前記圧力値の上限値を提示する制御を行う、前記(4)記載の圧排装置。
(6)
前記解析部は、前記圧力値と前記圧力値の上限値とを対比して提示する制御を行う、前記(5)記載の圧排装置。
(7)
前記解析部は、前記解析によって得られた圧力値の変化を提示する制御を行う、前記(4)〜(6)の何れか1項に記載の圧排装置。
(8)
前記解析部は、前記圧力値の経時変化を提示する制御を行う、前記(7)記載の圧排装置。
(9)
前記解析部は、前記圧力値の分布を提示する制御を行う、前記(7)または(8)に記載の圧排装置。
(10)
前記解析によって得られた圧力値を記憶する記憶部をさらに備える、前記(3)〜(9)の何れか1項に記載の圧排装置。
(11)
前記圧排子を保持するアームを備える、前記(3)〜(10)の何れか1項に記載の圧排装置。
(12)
前記解析部による解析により得られた圧力値に基づいて、前記アームを制御する制御部を備える、前記(11)記載の圧排装置。
(13)
前記制御部は、前記圧力値が前記圧力値の上限値以下となるように、前記アームを制御する、前記(12)記載の圧排装置。
(14)
前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記圧力値が前記圧力値の上限値に到達したことを、前記アームを介して提示する、前記(13)記載の圧排装置。
(15)
前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記アームを停止するよう制御する、前記(13)または(14)記載の圧排装置。
(16)
前記制御部は、入力操作部から与えられた操作情報に基づいて、前記アームを制御する、前記(12)〜(15)の何れか1項に記載の圧排装置。
(17)
前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記圧力値が前記圧力値の上限値に到達したことを、前記入力操作部を介して提示する、前記(16)記載の圧排装置。
(18)
前記制御部は、前記アームを力制御する、前記(12)〜(17)の何れか1項に記載の圧排装置。
1 圧排装置
10 圧排子
13 圧排部
15 圧排片
20 圧力センサ
30 解析装置
31 解析部
32 記憶部
50 表示装置
400 アーム装置
300 駆動部
420 アーム
430 アーム制御装置
431 アーム制御部
432 記憶部
500 マスター装置
520 入力操作用アーム
510 マスター制御装置
511 マスター制御部
512 記憶部
600 操作駆動部
10 圧排子
13 圧排部
15 圧排片
20 圧力センサ
30 解析装置
31 解析部
32 記憶部
50 表示装置
400 アーム装置
300 駆動部
420 アーム
430 アーム制御装置
431 アーム制御部
432 記憶部
500 マスター装置
520 入力操作用アーム
510 マスター制御装置
511 マスター制御部
512 記憶部
600 操作駆動部
Claims (18)
- 人体の臓器を圧排する圧排部と、
前記圧排部に設けられ、前記圧排部と前記人体の臓器との接触状態を検出する検出部と、を備える圧排子。 - 前記検出部は、前記接触状態として、前記圧排部が前記人体の臓器から受ける圧力を検出する、請求項1記載の圧排子。
- 請求項2記載の圧排子と、
前記検出部が出力した出力値を解析する解析部と、を備える、圧排装置。 - 前記解析部は、前記解析によって得られた圧力値を提示する制御を行う、請求項3記載の圧排装置。
- 前記解析部は、前記圧力値の上限値を提示する制御を行う、請求項4記載の圧排装置。
- 前記解析部は、前記圧力値と前記圧力値の上限値とを対比して提示する制御を行う、請求項5記載の圧排装置。
- 前記解析部は、前記解析によって得られた圧力値の変化を提示する制御を行う、請求項4記載の圧排装置。
- 前記解析部は、前記圧力値の経時変化を提示する制御を行う、請求項7記載の圧排装置。
- 前記解析部は、前記圧力値の分布を提示する制御を行う、請求項7記載の圧排装置。
- 前記解析によって得られた圧力値を記憶する記憶部をさらに備える、請求項3記載の圧排装置。
- 前記圧排子を保持するアームを備える、請求項3記載の圧排装置。
- 前記解析部による解析により得られた圧力値に基づいて、前記アームを制御する制御部を備える、請求項11記載の圧排装置。
- 前記制御部は、前記圧力値が前記圧力値の上限値以下となるように、前記アームを制御する、請求項12記載の圧排装置。
- 前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記圧力値が前記圧力値の上限値に到達したことを、前記アームを介して提示する、請求項13記載の圧排装置。
- 前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記アームを停止するよう制御する、請求項13記載の圧排装置。
- 前記制御部は、入力操作部から与えられた操作情報に基づいて、前記アームを制御する、請求項12記載の圧排装置。
- 前記制御部は、前記圧力値が前記圧力値の上限値に到達した場合には、前記圧力値が前記圧力値の上限値に到達したことを、前記入力操作部を介して提示する、請求項16記載の圧排装置。
- 前記制御部は、前記アームを力制御する、請求項12記載の圧排装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016069473A JP2017176534A (ja) | 2016-03-30 | 2016-03-30 | 圧排子及び圧排装置 |
| PCT/JP2017/003843 WO2017169097A1 (ja) | 2016-03-30 | 2017-02-02 | 圧排子及び圧排装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016069473A JP2017176534A (ja) | 2016-03-30 | 2016-03-30 | 圧排子及び圧排装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017176534A true JP2017176534A (ja) | 2017-10-05 |
Family
ID=59963867
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016069473A Pending JP2017176534A (ja) | 2016-03-30 | 2016-03-30 | 圧排子及び圧排装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017176534A (ja) |
| WO (1) | WO2017169097A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019138455A1 (ja) * | 2018-01-10 | 2019-07-18 | オリンパス株式会社 | 外科処置装置 |
| JP2021508522A (ja) * | 2017-12-21 | 2021-03-11 | ニューラレース メディカル,インコーポレイテッド | 非侵襲的な慢性疼痛療法のためのデバイス、システム、及び方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102149008B1 (ko) * | 2018-12-13 | 2020-08-31 | (주)미래컴퍼니 | 수술용 로봇의 충돌을 완화시키는 방법 및 시스템 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0486999A3 (en) * | 1989-09-01 | 1992-09-16 | Andronic Devices Ltd. | Holder for surgical instruments |
| JP2008188112A (ja) * | 2007-02-01 | 2008-08-21 | Olympus Corp | スタビライザ |
| US8083665B2 (en) * | 2007-03-06 | 2011-12-27 | Ethicon Endo-Surgery, Inc. | Pressure sensors for gastric band and adjacent tissue |
| US8801710B2 (en) * | 2010-12-07 | 2014-08-12 | Immersion Corporation | Electrosurgical sealing tool having haptic feedback |
| US8942828B1 (en) * | 2011-04-13 | 2015-01-27 | Stuart Schecter, LLC | Minimally invasive cardiovascular support system with true haptic coupling |
| JP2015002922A (ja) * | 2013-06-21 | 2015-01-08 | 国立大学法人信州大学 | 外科手術用装置 |
| JP6733660B2 (ja) * | 2015-03-25 | 2020-08-05 | ソニー株式会社 | 医療用支持アーム装置 |
-
2016
- 2016-03-30 JP JP2016069473A patent/JP2017176534A/ja active Pending
-
2017
- 2017-02-02 WO PCT/JP2017/003843 patent/WO2017169097A1/ja not_active Ceased
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021508522A (ja) * | 2017-12-21 | 2021-03-11 | ニューラレース メディカル,インコーポレイテッド | 非侵襲的な慢性疼痛療法のためのデバイス、システム、及び方法 |
| US12285623B2 (en) | 2017-12-21 | 2025-04-29 | NeuraLace Medical, Inc. | Devices, systems, and methods for non-invasive chronic pain therapy |
| WO2019138455A1 (ja) * | 2018-01-10 | 2019-07-18 | オリンパス株式会社 | 外科処置装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017169097A1 (ja) | 2017-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9936972B2 (en) | Method of automatically monitoring the penetration behavior of a trocar held by a robotic arm and monitoring system | |
| JP6582549B2 (ja) | 振動検出モジュール、振動検出装置、振動検出方法及び手術システム | |
| JP6157063B2 (ja) | 医療器具 | |
| US10524731B2 (en) | Electrode contact feedback system | |
| JP2014004310A (ja) | 医療器具 | |
| KR20120030174A (ko) | 촉각 피드백을 제공하는 수술 로봇 시스템 및 수술 장치, 그리고 그의 촉각 피드백 제공 방법 | |
| JP2007531546A (ja) | 高速血圧測定装置における動作管理 | |
| WO2006113394A3 (en) | Surgical instruments with sensors for detecting tissue properties, and systems using such instruments | |
| JPWO2009069413A1 (ja) | 駆動装置ならびにそれを備えた医療装置および訓練装置 | |
| JP6374672B2 (ja) | 医療器具及び医療システム | |
| WO2017169097A1 (ja) | 圧排子及び圧排装置 | |
| CN111801042A (zh) | 应力估算系统、应力估算装置和内窥镜系统 | |
| WO2020026386A1 (ja) | 内視鏡システムおよび制御装置 | |
| US10251536B2 (en) | Medical instrument, medical system, and mode transition method for medical instruments | |
| JP6033147B2 (ja) | 挿入装置 | |
| JPWO2016181432A1 (ja) | 医療用マニピュレータシステム | |
| US20190029573A1 (en) | Biological information display apparatus | |
| KR101283798B1 (ko) | 오실로메트릭 방법과 코르트코프음 방법을 병행하여 혈압을 측정하는 자동 혈압 측정 장치 및 방법 | |
| JP4963067B2 (ja) | 圧縮力計測装置 | |
| US11612312B2 (en) | Intubation system | |
| KR20120007558A (ko) | 심박측정을 위한 관상혈관 자동인식 및 최적측정 위치 보정 시스템 | |
| JP5095463B2 (ja) | 生体情報測定装置 | |
| JP5190869B2 (ja) | 計測装置 | |
| WO2010041629A1 (ja) | 血流検出装置 | |
| WO2023181824A1 (ja) | 心音取得装置、心音取得システム、心音取得方法、及びプログラム |