JP2017181273A - 水温検出装置及び水温検出方法 - Google Patents
水温検出装置及び水温検出方法 Download PDFInfo
- Publication number
- JP2017181273A JP2017181273A JP2016068148A JP2016068148A JP2017181273A JP 2017181273 A JP2017181273 A JP 2017181273A JP 2016068148 A JP2016068148 A JP 2016068148A JP 2016068148 A JP2016068148 A JP 2016068148A JP 2017181273 A JP2017181273 A JP 2017181273A
- Authority
- JP
- Japan
- Prior art keywords
- water temperature
- light
- water
- detection device
- temperature detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 title claims abstract description 274
- 238000000034 method Methods 0.000 title description 13
- 238000001514 detection method Methods 0.000 claims abstract description 100
- 230000005540 biological transmission Effects 0.000 claims description 13
- 230000023077 detection of light stimulus Effects 0.000 claims 1
- 238000011084 recovery Methods 0.000 abstract description 3
- 230000004048 modification Effects 0.000 description 22
- 238000012986 modification Methods 0.000 description 22
- 238000010586 diagram Methods 0.000 description 8
- 241000251468 Actinopterygii Species 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
Images







Landscapes
- Measuring Temperature Or Quantity Of Heat (AREA)
Abstract
【課題】投下及び回収の手間がなく、水中の水温を検出可能な新たな方式の水温検出装置を提供する。
【解決手段】水温検出装置1は、振動子32と、光源31と、光検出器33と、伝搬速度算出部11と、水温算出部12と、を備える。振動子32は、水中へ音波を送信する。光源31は、水中へ光を照射する。光検出器33は、光源31によって照射された光の散乱光が、振動子32によって送信された音波が伝搬する領域を通過することで屈折した光である屈折光を少なくとも検出する。伝搬速度算出部11は、光検出器33から検出結果が入力され、屈折光が検出される位置の変化に基づいて、振動子32が送信した音波の伝搬速度を算出する。水温算出部12は、伝搬速度算出部11が算出した伝搬速度に基づいて水温を算出する。
【選択図】図1
【解決手段】水温検出装置1は、振動子32と、光源31と、光検出器33と、伝搬速度算出部11と、水温算出部12と、を備える。振動子32は、水中へ音波を送信する。光源31は、水中へ光を照射する。光検出器33は、光源31によって照射された光の散乱光が、振動子32によって送信された音波が伝搬する領域を通過することで屈折した光である屈折光を少なくとも検出する。伝搬速度算出部11は、光検出器33から検出結果が入力され、屈折光が検出される位置の変化に基づいて、振動子32が送信した音波の伝搬速度を算出する。水温算出部12は、伝搬速度算出部11が算出した伝搬速度に基づいて水温を算出する。
【選択図】図1
Description
本発明は、主として、水中の水温を検出する水温検出装置に関する。
従来から、水中の水温を計測して、例えば水深毎の水温を検出する水温検出装置が知られている。以下の特許文献には、この種の水温検出装置が開示されている。
特許文献1から6には、超音波式の水温検出装置が開示されている。超音波式の水温検出装置は、例えば、離れて配置された送信用振動子と受信用振動子を備え、送信用振動子が送信した超音波の反射波を受信用振動子で受信し、反射波を受信した方向と、送信用振動子と受信用振動子の位置及び傾斜角と、を用いて超音波の伝搬速度を求め、水温を検出する。
特許文献7及び8には、超音波と光を用いた水温検出装置が開示されている。これらの水温検出装置は、超音波を送信する振動子と、光を照射する光源と、光検出器と、を備える。光検出器は、光源から照射された光が超音波で反射した反射光を検出する。これにより、超音波の伝搬速度を求め、水温を検出する。なお、特許文献9には、水中に送信したレーザ光の散乱光の周波数変位量に基づいて音速を算出し、水中の温度を算出する水温検出装置が開示されている。
しかし、超音波式の水温検出装置は、送信用振動子と受信用振動子に高い取付精度が要求される。送信用振動子と受信用振動子の取付位置又は取付向きの僅かな誤差が大きな水温の誤差に繋がるため、実用化は非常に困難である。また、超音波と光を用いた水温検出装置は、光が超音波で反射した反射光の強度が非常に低いため、実用化は非常に困難である。
従って、実際には、ワイヤに水温計及び記憶装置を接続し、当該ワイヤを水中に投下することで水中の水温を検出している。しかし、この構成はワイヤに接続した水温計等を投下して回収する必要があるため、非常に手間が掛かる。
本発明は以上の事情に鑑みてされたものであり、その主要な目的は、投下及び回収の手間がなく、水中の水温を検出可能な新たな方式の水温検出装置を提供することにある。
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
本発明の第1の観点によれば、以下の構成の水温検出装置が提供される。即ち、この水温検出装置は、振動子と、光源と、光検出器と、伝搬速度算出部と、水温算出部と、を備える。前記振動子は、水中へ音波を送信する。前記光源は、水中へ光を照射する。前記光検出器は、前記光源によって照射された光の散乱光が、前記振動子によって送信された音波が伝搬する領域を通過することで屈折した光である屈折光を少なくとも検出する。前記伝搬速度算出部は、前記光検出器から検出結果が入力され、前記屈折光が検出される位置の変化に基づいて、前記振動子が送信した音波の伝搬速度を算出する。前記水温算出部は、前記伝搬速度算出部が算出した前記伝搬速度に基づいて水温を算出する。
これにより、本発明の水温検出装置は、投下及び回収の手間がなく、超音波式のように高い取付精度も要求されず、特許文献7及び8のように検出対象の光の強度も低すぎない。従って、水中の水温を検出可能であって、現実的に使用可能な水温検出装置が実現できる。
本発明の第2の観点によれば、光源によって照射された光の散乱光のうち、振動子が送信した音波が伝搬する領域を通過することで屈折した光である屈折光を少なくとも検出し、前記屈折光が検出される位置の変化に基づいて、前記振動子が送信した音波の伝搬速度を算出し、算出した前記伝搬速度に基づいて水温を算出する水温検出方法が提供される。
これにより、本発明の水温検出方法は、投下及び回収の手間がなく、超音波式のように高い取付精度も要求されず、特許文献7及び8のように検出対象の光の強度も低すぎない。従って、水中の水温を検出可能であって、現実的に使用可能な水温検出方法が実現できる。
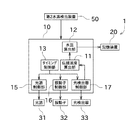
次に、図面を参照して本発明の実施形態を説明する。初めに、図1を参照して、水温検出装置1の構成について説明する。図1は、水温検出装置1のブロック図である。
水温検出装置1は、船舶に搭載されており、海、湖、又は川等の水深毎の水温を検出する。水温検出装置1は、船舶が移動中であっても停止中であっても水深毎の水温を検出可能である。図1に示すように、水温検出装置1は、演算装置10と、記憶装置20と、光源31と、振動子32と、光検出器33と、を備える。
演算装置10は、伝搬速度算出部11と、水温算出部12と、タイミング制御部13と、光源制御部15と、振動子制御部16と、光検出器制御部17と、を備える。演算装置10は、CPU等で構成されており、ROMに記憶されたプログラムをRAMに読み出して実行することで演算処理を行うことができる。演算装置10は、CPUに限られず、FPGA又はASIC等により構成されていても良い。また、本実施形態では、1つのハードウェアである演算装置10により伝搬速度算出部11から光検出器制御部17が構成されているが、2以上のハードウェアにより構成されていても良い。例えば、光源制御部15から光検出器制御部17が個別のハードウェアで構成されていても良い。演算装置10の各部の機能については後述する。
記憶装置20は、フラッシュメモリ(フラッシュディスク及びメモリーカード等)、ハードディスク、又は光ディスク等である。記憶装置20は、水温検出装置1が検出した水深毎の水温を記憶する。
光源31は、船底に取り付けられており、水中に光を照射する。光源31は、発光ダイオード又はレーザ等で構成されている。光源31が照射する光は指向性を有しており、基本的には水中を直進する。ただし、光源31が照射する光は、進行に応じてある程度は広がっても良い。本実施形態では、光源31が光を照射する方向は真下であるが、異なる方向に光を照射する構成であっても良い。また、光源31が照射する光の波長は任意であり、可視光であっても良いし可視光以外であっても良いが、水によって減衰しにくい波長であることが好ましい。具体的には、ピークの波長が400nmから550nmであることが好ましい。光源31の光の照射の有無の切替えは、光源制御部15によって制御されている。
振動子32は、船底に取り付けられており、水中に超音波を送信する。振動子32が送信する超音波は指向性を有しており、基本的には水中を直進する。ただし、振動子32が送信する超音波は、進行に応じて広がっても良い。本実施形態では、振動子32が超音波を送信する方向は真下であるが、異なる方向に超音波を送信する構成であっても良い。振動子32が送信する音波の周波数は任意であり、50kHzから200kHzの範囲の超音波であっても良いし、それ以外の周波数の超音波であっても良いし、超音波以外の音波であっても良い。振動子32の超音波の送信の有無の切替えは、振動子制御部16によって制御されている。
光検出器33は、船底に取り付けられており、水中の光を検出する。光源31、振動子32、及び光検出器33は、所定方向に並べて配置されており、光源31と光検出器33の間に振動子32が配置されている。光検出器33は、平面状に並べて配置されたフォトダイオード等から構成されている。なお、フォトダイオードは線状に(一列に並べて)配置されていても良い。光検出器33は、光源31が配置された側の斜め下方の光の強度分布を検出できるように配置されている。光検出器33の設定は光検出器制御部17によって制御されている。
次に、光検出器33が検出する光について図2を参照して説明する。図2は、超音波の伝搬に伴う光検出器33の検出画像の変化を示す図である。図2には、船底に配置された光源31、振動子32及び光検出器33が模式的に示されている。光源31の下方の太線は、光源31が照射する光である。振動子32の下方の破線は超音波の経路であり、送信されて下方に進む超音波(即ち超音波が伝搬する領域)が縞模様の楕円で示されている。光検出器33の破線は光検出器33が光を検出可能な領域である。光検出器33の右の画像は、光検出器33が検出した光を図示したものである。
光源31が照射した光は指向性を有しているため、この光は光検出器33に直接的には入力されない。光源31が照射した光は、光の波長より小さい物体(水等の分子)によるレイリー散乱と、光の波長以上の物体(プランクトン又は浮遊物等)によるミー散乱により散乱する。これらの散乱による散乱光強度は、条件によって異なるが、特許文献7及び8の超音波による光の反射光を検出する場合の散乱光強度よりも、数桁大きい。従って、特殊な光源31又は光検出器33を用いることなく光源31の散乱光を検出可能である。従って、光検出器33は、光源31による光の照射中は、図2の時刻Taに示すように直線状の光を検出する。図2の検出画像の上下方向は水深に相当する。
また、振動子32が超音波を送信することで、光源31が照射した光の散乱光は、この超音波が伝搬する領域(図2の楕円の縞模様部分)を通過する。超音波は疎密波であるため、超音波が伝搬する領域では水の密度が変化する。また、水の密度が変化すると、当該部分を伝わる光の速度も変化する。従って、光源31が照射した光の散乱光は、超音波が伝搬する領域を通過することで屈折するため、光検出器33が検出する光にも乱れが生じる(時刻Tbから時刻Tdを参照)。なお、光源31が照射した光が超音波の伝搬する領域を通過することで屈折により乱れた光を「屈折光」と称する。従って、光源31が光を照射している間に振動子32が超音波を送信した場合、光検出器33が検出する屈折光の位置は、超音波の伝搬に伴って水深の深い方へ移動する。
次に、光検出器33が検出した屈折光に基づいて、水深毎の水温を検出する処理について図1から図3を参照して説明する。図3は、水温検出装置1の演算装置10が行う処理を示すフローチャートである。
演算装置10のタイミング制御部13は、屈折光の位置変化が光検出器33で検出できるように、光源31、振動子32、及び光検出器33の動作タイミングを制御する(詳細は後述)。これにより、水温検出装置1は、所定のタイミングで、光の照射、超音波の送信、及び屈折光の検出を行う(S101、タイミング制御工程)。
演算装置10の伝搬速度算出部11は、光検出器33が検出した屈折光の検出位置の変化に基づいて、振動子32が送信した超音波の伝搬速度を算出する(S102、伝搬速度算出工程)。具体的には、光検出器33が検出した画像の上下方向(水深方向)の長さと、振動子32の下方の実際の長さと、は振動子32と光検出器33の配置及び光検出器33の設定(撮像範囲等)に基づいて求めることができる。従って、伝搬速度算出部11は、連続する複数の画像における屈折光の位置変化に基づいて、振動子32が送信した超音波の伝搬速度を算出することができる。
また、光検出器33は、超音波の伝搬速度を水深毎に検出する。具体的には、例えば水深を所定の範囲に区切って、当該水深範囲毎に超音波の伝搬速度を算出する。なお、水深毎の水温をプロットし、例えば最小二乗法等の近似法を用いて、連続的に変化する水深と水温の対応関係を求めても良い。
水温算出部12は、伝搬速度算出部11が算出した水深毎の超音波の伝搬速度に基づいて、水深毎の水温を算出する(S103、水温算出工程)。水深に基づいて水温を算出する方法は、公知の方法がいくつか知られており、それらの方法により水温が算出される。例えば、水温算出部12は、Mackenzieの音速式を用いて水温を算出する。Mackenzieの音速式とは、音速、水温、水深、及び塩分濃度の関係を示した式である。
水温算出部12は、水深毎の水温を算出した後に、その算出結果を記憶装置20に記憶する(S104、水温記憶工程)。このとき、水温算出部12は、図略のGPS受信機等から得られる位置情報及び日時等と、水深毎の水温と、を対応付けて記憶しても良い。演算装置10は、S101からS104の処理を連続して行う。これにより、船舶を移動させながらこの処理を行うことで、自船の航跡の水深毎の水温を検出することができる。なお、この情報は、図略の表示装置に表示しても良い。
次に、水温検出装置1の動作のタイミングについて図4を参照して説明する。図4は、光源31、振動子32、及び光検出器33のタイミングチャートである。
光源31、振動子32、及び光検出器33は、タイミング制御部13が生成した同期信号を受信したタイミングに基づいて所定の動作を行う。具体的には、振動子32は、同期信号を受信したタイミングから僅かな時間が経過した後に超音波を1回送信する。光源31は、同期信号を受信したタイミングから僅かな時間が経過した後に、所定の時間間隔で(具体的には図4のT0,T1,T2,・・Tnに)、非常に短い時間だけ光を合計n回照射する。光検出器33は、同期信号を受信したタイミングで光の検出を開始する。このように、光検出器33の光の検出を、振動子32及び光源31より若干早くしたのは、光検出器33のシャッターが開く(露光が開始される)までの時間を考慮したためである。
光検出器33が屈折光を検出するのは、光源31が光を照射しているタイミングのみである。また、光源31は所定の時間間隔で光を照射するが、光の照射毎に超音波が存在する位置が異なるため、屈折光が検出される位置も光の照射毎に変化する。光源31は非常に短い時間だけ光を照射するため、所定時間間隔で、超音波の位置がプロットされると考えることができる。従って、光検出器33は、光源31がn回光を照射する間、露光を続けるため、光検出器33が出力する画像は、図4に示すように、所定の時間間隔における超音波の位置変化を示す画像となる。この画像に基づいて、水深毎の超音波の伝搬速度を算出することができる。
なお、伝搬速度算出部11は、T0からTnの一連の処理を1回行って超音波の伝搬速度を検出しても良いが、これらの一連の処理を複数回行って、平均等をとることにより水深毎の超音波の伝搬速度を検出しても良い。あるいは、初めにT0からT1までの処理を複数回行ってT1における超音波の位置を正確に求め、次にT2についても同様の処理を行い、これらの処理を所定の深度(所定の時間)まで行うことで、水深毎の超音波の伝搬速度を検出しても良い。
次に、図5及び図6を参照して、上記実施形態の第1変形例を説明する。図5は、第1変形例に係る、超音波の伝搬に伴う光検出器33の出力画像の変化を示す図である。図6は、第1変形例に係る、光源31、振動子32、及び光検出器33のタイミングチャートである。なお、本変形例及び以下の変形例の説明においては、前述の実施形態と同一又は類似の部材には図面に同一の符号を付し、説明を省略する場合がある。
第1変形例では、振動子32は、上記実施形態よりも広いビーム幅の超音波を送信する(図5を参照)。このようにビーム幅が広い場合、水深方向の広範囲の散乱光が、超音波が伝搬する領域を通過することとなる。従って、光検出器33は、例えば図5の時刻Tbに示すように、水深方向に長い屈折光を検出する。なお、ビーム幅を広くする代わりに、超音波の送信時間を長くした場合であっても、同様の画像が検出される。
このように屈折光が水深方向に長い場合、上記実施形態のタイミングで水温検出装置1の各部が処理を行っても、屈折光同士が重なった画像が出力されるため、水深毎の超音波の伝搬速度を算出することは困難である。
以上を考慮して、第1変形例では図6に示すタイミングで水温検出装置1の各部が処理を行う。振動子32及び光源31の動作は、基本的には上記実施形態と同じである。
また、第1変形例では、光検出器33は、シャッターの切換え(露光の有無の切換え)を高速で行うことが可能であり、露光時間が僅かでも高精度な画像が取得可能な構成である。光検出器33は、光源31が光を照射する毎に短時間だけ露光を開始してすぐに露光を終了する。
これにより、所定の時間における屈折光の位置を取得できる。この処理を繰り返すことにより、光検出器33は、所定の時間毎の屈折光の位置を取得できる。これにより、伝搬速度算出部11は、例えば屈折光と散乱光の境界の位置が移動する速度に基づいて、水深毎の超音波の伝搬速度を算出することができる。
第1変形例の構成を採用することにより、振動子32が送信する超音波のビーム幅や送信長さを問わず、超音波の伝搬速度を算出することができる。従って、汎用性の高い水温検出装置1が実現できる。
これに対し、上記実施形態では、光検出器33は光源31が複数回光を照射する間、光を検出し続ければ良いので、第1変形例のような高性能の光検出器33が不要である。従って、水温検出装置1のコストを下げることができる。
なお、上記実施形態及び第1変形例では、振動子32が超音波を1回送信する毎に、光源31が光を複数回照射する構成である。これに代えて、振動子32が超音波を1回送信する間に、光を1回だけ照射しても良い。具体的には、振動子32の超音波の送信と同時又はその前から、光源31は光を照射し続ける。そして、光検出器33は、所定の時間間隔で複数の画像を取得する。これらの画像に基づいて、超音波の伝搬速度を算出することができる。
これにより、光源31が光を常時照射する構成であっても良いため、光源31の同期制御が不要となる。ただし、この構成も、第1変形例と同様に高精度の光検出器33が必要となる。なお、光源31、振動子32、及び光検出器33は、上記で説明した以外のタイミングで処理を行っても良い。
次に、図7を参照して、第2変形例を説明する。図7は、第2変形例に係る水温検出装置1及び第2水温検出装置50のブロック図である。
上記実施形態では、水温検出装置1は、他の水温検出装置の検出結果を用いず、光検出器33の検出結果のみに基づいて水深毎の水温を算出している。この点、第2変形例では、水温検出装置1は、外部に配置された第2水温検出装置50が検出した水温を基準として、水深毎の水温を算出する。
第2水温検出装置50は、検出素子を備え、当該検出素子に触れている水の温度を検出する。従って、第2水温検出装置50は、水温検出装置1のように実際に触れていない箇所の水中の水温を検出できる装置ではない。
第2水温検出装置50は、水面又は水面近傍の所定の深度の水温を検出するように配置される。第2水温検出装置50が検出した水温は、演算装置10(詳細には水温算出部12)に出力される。水温算出部12は、超音波の伝搬速度に基づいて、水深に応じた水温の変化量を検出する。水温算出部12は、第2水温検出装置50が検出した所定の水深の水温を基準として、水深毎の変化量を適用することで、水深毎の水温を検出する。
この構成により、第2水温検出装置50によって水面又は水面近傍の温度を精度良く検出することができるので、より正確な水深毎の水温を検出することができる。
次に、図8を参照して、第3変形例を説明する。図8は、第3変形例に係る水温検出装置1及び第3水温検出装置60のブロック図である。
第3水温検出装置60は、上述した超音波式の水温検出装置であり、水温検出装置1の外部に配置されている。第3水温検出装置60は、送信用振動子61と、受信用振動子62と、制御装置63と、を備える。第3水温検出装置60は、送信用振動子61が送信した超音波の反射波を受信用振動子62で受信し、反射波を受信した方向と、送信用振動子61と受信用振動子62の位置及び傾斜角と、を用いて超音波の伝搬速度を算出することで、水深毎の水温を検出する。第3水温検出装置60は、水深毎の水温を検出して演算装置10へ出力する。
上述のように第3水温検出装置60は、送信用振動子61及び受信用振動子62の取付位置及び取付向きの僅かな誤差が水温の大きな誤差に繋がる。演算装置10は、第3水温検出装置60から受信した水深毎の水温と、自ら算出した水深毎の水温と、を比較することで、第3水温検出装置60が検出した水深毎の水温の誤差を補正する。これにより、送信用振動子61及び受信用振動子62の取付精度があまり高くない場合であっても、第3水温検出装置60により水深毎の水温を精度良く検出できる。
ここで、水温検出装置1が検出する散乱光は、特許文献7及び8の超音波による光の反射光よりも、散乱光強度が数桁大きいが、水深が非常に深い領域の水温を検出するためには、光源31が非常に強い光を照射する必要がある。この点、第3水温検出装置60は、光を使用していないため、水深が非常に深い場合であっても特別な機器を用いることなく水温を検出可能である。
以上を考慮し、第3変形例の水温検出装置1は、水深が浅い領域では、水温検出装置1によって水深毎の水温を検出する。そして、水温検出装置1は、水深が深い領域では、第3水温検出装置60の検出値を補正することで、水深毎の水温を検出する。この構成により、広い水深範囲にわたって水深毎の水温を検出できる。
以上に本発明の好適な実施形態及び変形例を説明したが、上記の構成は例えば以下のように変更することができる。
振動子32は、魚群探知機が備える振動子と共用であっても良い。例えば、魚群探知機に本実施形態の光源31及び光検出器33等を追加して、水温を検出可能な機能を追加できる。この場合、この魚群探知機は、本発明の水温検出装置に該当する。
上記実施形態の水温検出装置1は、水深毎の水温を検出する構成であるが、所定の水深の水温を検出する構成であっても良い。例えば、水温検出装置1は、ユーザが指定した水深範囲の水温(つまり、1地点毎に1つの水温)を検出する。
光源31、振動子32、及び光検出器33は、直線状に並べて配置されていなくても良い。例えば、光源31が照射する光又は振動子32が送信する超音波の形状又は方向によっては、直線状に配置することなく、本発明の効果を発揮させることができる。
光源31、振動子32、及び光検出器33は、船底以外(船の側面の喫水部分)に配置されていても良い。また、水温検出装置1は、船以外(例えば、海上の固定物)に配置され、下方の水温を検出することもできる。
1 水温検出装置
10 演算装置
11 伝搬速度算出部
12 水温算出部
13 タイミング制御部
31 光源
32 振動子
33 光検出器
10 演算装置
11 伝搬速度算出部
12 水温算出部
13 タイミング制御部
31 光源
32 振動子
33 光検出器
Claims (10)
- 水中へ音波を送信する振動子と、
水中へ光を照射する光源と、
前記光源によって照射された光の散乱光が、前記振動子によって送信された音波が伝搬する領域を通過することで屈折した光である屈折光を少なくとも検出する光検出器と、
前記光検出器から検出結果が入力され、前記屈折光が検出される位置の変化に基づいて、前記振動子が送信した音波の伝搬速度を算出する伝搬速度算出部と、
前記伝搬速度算出部が算出した前記伝搬速度に基づいて水温を算出する水温算出部と、
を備えることを特徴とする水温検出装置。 - 請求項1に記載の水温検出装置であって、
前記伝搬速度算出部は、水深毎に前記伝搬速度を算出し、
前記水温算出部は、水深毎の水温を算出することを特徴とする水温検出装置。 - 請求項2に記載の水温検出装置であって、
前記水温算出部は、外部に配置され、所定の深度の水温を検出する第2水温検出装置が検出した水温を取得し、当該水温を基準として、水深毎の水温を算出することを特徴とする水温検出装置。 - 請求項2に記載の水温検出装置であって、
前記水温算出部は、外部に配置され、水深毎の水温を算出する第3水温検出装置が検出した水温を取得し、
前記第3水温検出装置は、送信用振動子が送信した音波の反射波を、当該送信用振動子とは離れて配置された受信用振動子で受信することで、音速を求めて水深毎の水温を検出し、
前記水温算出部が算出した水深毎の水温に基づいて、前記第3水温検出装置が検出した水深毎の水温を補正することを特徴とする水温検出装置。 - 請求項1から4までの何れか一項に記載の水温検出装置であって、
前記振動子、前記光源、及び前記光検出器は、並べて配置されており、
前記光源と前記光検出器との間に前記振動子が配置されていることを特徴とする水温検出装置。 - 請求項1から5までの何れか一項に記載の水温検出装置であって、
前記振動子が音波を1回送信する毎に、所定のタイミングで前記光源が光を複数回照射することを特徴とする水温検出装置。 - 請求項6に記載の水温検出装置であって、
前記光検出器は、前記光源が光を複数回照射する間、光を検出し続けることを特徴とする水温検出装置。 - 請求項6に記載の水温検出装置であって、
前記光検出器は、前記光源が光を照射する毎に、光の検出を開始して終了することを特徴とする水温検出装置。 - 請求項1から8までの何れか一項に記載の水温検出装置であって、
船舶に搭載され、当該船舶の移動中に水温を検出することを特徴とする水温検出装置。 - 光源によって照射された光の散乱光のうち、振動子が送信した音波が伝搬する領域を通過することで屈折した光である屈折光を少なくとも検出し、
前記屈折光が検出される位置の変化に基づいて、前記振動子が送信した音波の伝搬速度を算出し、
算出した前記伝搬速度に基づいて水温を算出することを特徴とする水温検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016068148A JP2017181273A (ja) | 2016-03-30 | 2016-03-30 | 水温検出装置及び水温検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016068148A JP2017181273A (ja) | 2016-03-30 | 2016-03-30 | 水温検出装置及び水温検出方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017181273A true JP2017181273A (ja) | 2017-10-05 |
Family
ID=60005970
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016068148A Pending JP2017181273A (ja) | 2016-03-30 | 2016-03-30 | 水温検出装置及び水温検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017181273A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120760882A (zh) * | 2025-09-08 | 2025-10-10 | 浙江大学 | 一种水体垂直剖面温度测量方法及系统 |
-
2016
- 2016-03-30 JP JP2016068148A patent/JP2017181273A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120760882A (zh) * | 2025-09-08 | 2025-10-10 | 浙江大学 | 一种水体垂直剖面温度测量方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6944027B2 (ja) | 流体測定装置、流体測定方法、及びプログラム | |
| JP5869548B2 (ja) | 超音波診断装置及びその制御プログラム | |
| JP6516358B2 (ja) | 計測装置 | |
| JP4633565B2 (ja) | 河川データ測定方法及び装置 | |
| JP2017181273A (ja) | 水温検出装置及び水温検出方法 | |
| CN101910802B (zh) | 用于确定流动的流体的流量的方法及设备 | |
| CN103211588B (zh) | 基于横向流速模型的血流流速成像方法 | |
| US9976990B2 (en) | Vibration measuring apparatus using parametric speaker and two-dimensional scanning mirror | |
| JP6825827B2 (ja) | 超音波計測装置、超音波計測プログラム及び超音波計測方法 | |
| RU153808U1 (ru) | Параметрический эхоледомер | |
| US10900987B2 (en) | Robust particle velocity measurement | |
| JP5268686B2 (ja) | 電磁超音波法による測定装置及び測定方法 | |
| RU2311662C1 (ru) | Способ измерения расстояния до контролируемого объекта | |
| RU2015130710A (ru) | Способ измерения глубин и эхолот для его осуществления | |
| RU2545065C2 (ru) | Способ измерения скорости звука в воде | |
| JP2024515755A5 (ja) | 液体中のワークピースをレーザ加工するための方法 | |
| MX2022004817A (es) | Monitorizacion de productos en linea en biofabricacion continua integrada. | |
| CN116869567B (zh) | 一种剪切波弹性测量方法及剪切波弹性成像系统 | |
| JP2008261873A (ja) | 水の濁度の連続観測装置 | |
| JP2016142677A (ja) | 送信角算出装置、送信角算出方法、及び、ソーナー装置 | |
| JP2017156199A (ja) | 目標検出システムおよび目標検出方法 | |
| RU2311663C1 (ru) | Способ измерения расстояния до контролируемого объекта | |
| RU135117U1 (ru) | Система измерения высот внутренних волн в море на ходу судна | |
| CN108398573A (zh) | 速度测量方法、系统和无人船 | |
| KR101787104B1 (ko) | 음장 가시화 시스템 및 방법 |