JP2017181457A - 落雷位置標定システム、落雷位置標定装置、及び落雷位置標定方法 - Google Patents
落雷位置標定システム、落雷位置標定装置、及び落雷位置標定方法 Download PDFInfo
- Publication number
- JP2017181457A JP2017181457A JP2016072905A JP2016072905A JP2017181457A JP 2017181457 A JP2017181457 A JP 2017181457A JP 2016072905 A JP2016072905 A JP 2016072905A JP 2016072905 A JP2016072905 A JP 2016072905A JP 2017181457 A JP2017181457 A JP 2017181457A
- Authority
- JP
- Japan
- Prior art keywords
- lightning
- lightning strike
- stroke
- strike
- processed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
【解決手段】本発明による落雷位置標定システムは、落雷による電磁波を検知し、観測データを送信する複数の受信局と、複数の受信局のそれぞれからの観測データを受信し、落雷位置を標定する落雷位置標定装置と、を有する。そして、落雷位置標定装置は、第一雷撃から1秒以内に発生した雷撃を特定する処理と、受信局から受信した観測データを用いて、複数の雷撃を標定する処理と、処理対象の雷撃と直前の雷撃との発生時間差、処理対象の雷撃と第一雷撃との波高値の比率、及び処理対象の雷撃と第一雷撃との距離に基づいて、処理対象の雷撃が多地点同時雷撃であるか判定する処理と、判定する処理による判定結果と共に、落雷の標定結果を出力する処理と、を実行する。
【選択図】図4
Description
図1は、多重雷撃と多地点同時雷撃の概念を示す図である。図2は、多重雷撃の形成について説明するための図である。図3は、多地点同時雷撃の形成について説明するための図である。
(i)落雷は、単一の雷撃もしくは複数の雷撃からなる。
(ii)最初の雷撃が発生してから1秒以内に、10km以内で発生した雷撃のうち、雷撃どうしの間隔が500ms以下のものを同一の落雷に含まれる雷撃とする。
図4は、本発明の実施形態による落雷位置標定システム1の概略構成例を示す機能ブロック図である。落雷位置標定システム1は、落雷位置標定装置10と、複数の各地に配置され雷撃の観測データを計測する複数の受信局140−1〜140−nと、を有している。落雷位置標定装置10と複数の受信局140−1〜140−nとはネットワーク150を介して接続されている。ネットワーク150は一例としてインタネットを用いても良いし、専用線を用いても良い。
現在、雷撃位置を標定する方法として、主に、MDF(Magnetic Direction Finder)方式、TOA(Time of Arrival)方式、及びMDF方式とTOA方式を組み合わせたIMPACT(Improved Accuracy from Combined Technology)方式の3つが提案されている。何れの方式を用いて雷撃位置を標定しても良い。以下、各方式の概要について簡単に説明する。
MDF方式では、各受信局(各観測点)におけるセンサが雷放電から放射された電磁波の伝搬方位を特定し、複数のセンサが検知した方位の交点を雷放電源とする方式である。センサには、直交ループアンテナが取り付けられており、これによって南北(N−S)と東西(E−W)方向の受信磁界信号強度比から電磁波の到来方向を特定する。ただし、直交ループアンテナによる到達方位の推定には、180度の不確定性が含まれる。
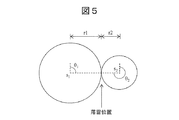
TOA方式では、異なる2地点に設置されているセンサにおいて雷放電が放出する電磁波の受信時刻差が一定な双曲線を回転楕円体上に描くという原理を応用したものである。最小で3局のセンサにおける電磁波の到達時刻が分かれば、雷放電源の位置の標定が可能である。
図5は、2局のセンサのベースライン上に発生した落雷の位置標定を行った例を示している。雷撃時刻をT0とし、センサS1、S2間における雷放電が放出した電磁波の受信時刻を、それぞれT1、T2とすると、受信時刻差から、それぞれのセンサから雷撃点までの距離r1とr2を求めることができる。そして、センサS1、S2が推定した電磁波の到来方向を、それぞれθ1、θ2とする。半径r1、r2の円とθ1、θ2のベクトルが交差するようにT0を決定すると、雷撃点の位置を推定できる。
図7は、多重雷撃及び多地点同時雷撃における位置標定について説明するための図である。図7において、各楕円は、標定された各雷撃の誤差楕円を示している。
図8は、本発明の実施形態による落雷位置標定システム1における落雷位置標定処理の詳細を説明するためのフローチャートである。落雷は、前述のように、単一の雷撃若しくは複数の雷撃によって構成される。そして、1つの落雷については、最初の雷撃の位置によって落雷位置が標定され、1つの落雷に含まれる全ての雷撃によって落雷の多重度が決定される。
雷撃があると、各観測点に設置された各受信局140−1〜nは、雷撃によって発生した雷放電による電磁波を検知する。
落雷位置標定装置10は、通信デバイス(図示せず)を用いて、各受信局(各観測点)140−1〜140−nから雷撃の観測データを受信する。観測データには、各受信局を識別するための識別情報(受信局ID)と雷放電による電磁波の検知(観測)時刻の情報や電磁波の伝搬方位の情報が含まれる。なお、各受信局140−1〜140−nは、受信局IDの代わりに、落雷位置標定装置10と該当する受信局との距離の情報を観測データとして送信しても良い。
雷撃位置標定プログラム121は、受信した全観測データを用いて、各雷撃の位置を標定する。標定方式は、上述の3つの方式の何れを用いても良いが、これらの方式以外のものであっても良い。なお、この段階では、観測した雷撃が多重雷撃を構成するものか多地点同時雷撃を構成するものかは分からない。
雷撃位置標定プログラム121は、ステップ103で標定された雷撃データを、最初の雷撃の発生から1秒以内に発生したもので分類する。最初の雷撃から1秒を過ぎて発生した雷撃は、最初の雷撃グループには含まれず(最初の落雷を構成する雷撃ではない)、次の雷撃グループ(次の1秒間に含まれる雷撃のグループ)を構成する最初の雷撃となる。従って、例えば数秒間以上に亘って落雷があった場合、複数の雷撃グループが生成されることになる。
多地点同時雷撃判定プログラム122は、雷撃のグループ(例えば、1秒間)ごとに、当該グループに含まれる各雷撃が多地点同時雷撃を構成するか判定する。ステップ105の詳細は図9を用いて説明する。ステップ105の処理によって、対象の雷撃グループに含まれる雷撃が多重雷撃を構成するか多地点同時雷撃を構成するか判断される。
雷撃位置標定プログラム121は、ステップ103の処理結果とステップ105の処理結果とに基づいて、落雷のエネルギーを算定(推定)する。多地点同時雷撃の場合、同一の位置に着雷したと判定された雷撃の電流値、及び枝分かれして別の位置に着雷した雷撃の電流値の総和に基づいて、対象の落雷のエネルギーを算出(推定)する。例えば、地表面と地球の電離層の下面との電位が約300kVとすると、落雷の総エネルギーは、地表面と電離層下面との電位と総電流値との乗算によって求まる。また、雷撃位置標定プログラム121は、各雷撃のエネルギーも求めることができる。
標定結果提示プログラム123は、表示装置111の表示画面上に標定結果(例えば、落雷位置、多重度、落雷のエネルギー、各雷撃の電流値、落雷の電流値、標定精度50%以上の領域の情報等)を表示する。なお、図示しないプリンタによって標定結果を印刷するようにしてもよい。
図9は、本発明の実施形態の落雷位置標定システム1における多地点同時雷撃判定処理(ステップ105)の詳細を説明するためのフローチャートである。当該フローチャートにおけるステップ201からステップ206までの処理は、ステップ104で分類された雷撃グループ毎に、かつ各雷撃グループに含まれる雷撃の全てに対して実行される。
多地点同時雷撃判定プログラム122は、処理対象の雷撃と直前の雷撃との間に30ms以上の発生時間差があるか判断する。各雷撃の発生時刻はステップ103において標定されているため、処理対象の雷撃の発生時刻とその直前の雷撃の発生時刻から両者の発生時間差は容易に算出することができる。発生時間差が30ms以上の場合(ステップ201でYesの場合)、処理はステップ202に移行する。発生時間差が30ms未満の場合(ステップ201でNoの場合)、処理はステップ206に移行する。ここで、30msという閾値は、発明者らが雷撃の観測結果に鑑みて導き出した値(例)である。
多地点同時雷撃判定プログラム122は、処理対象の雷撃(後続雷撃)の波高値(電流値)と第一雷撃(最初の雷撃)の波高値(電流値)処理対象の雷撃の比率(後続雷撃の波高値/第一雷撃の波高値)が80%以上であるか否か判断する。当該比率が80%以上である場合(ステップ202でYesの場合)、処理はステップ203に移行する。当該比率が80%未満である場合(ステップ202でNoの場合)、処理はステップ206に移行する。
多地点同時雷撃判定プログラム122は、処理対象の雷撃の標定位置と第一雷撃の標定位置との距離が1km以内であるか判断する。当該距離が1km以内である場合(ステップ203でYesの場合)、処理はステップ204に移行する。当該距離が1kmより大きい場合(ステップ203でNoの場合)、処理はステップ206に移行する。ここで、1kmという閾値は、発明者らが雷撃の観測結果に鑑みて導き出した値(例)である。
多地点同時雷撃判定プログラム122は、処理対象の雷撃の誤差楕円が他の雷撃の誤差楕円と重なっているか否か判断する。処理対象の雷撃の誤差楕円が他の雷撃の誤差楕円と重なっている場合(ステップ204でYesの場合)、処理はステップ206に移行する。処理対象の雷撃の誤差楕円が他の雷撃の誤差楕円と重なっていない場合(ステップ204でNoの場合)、処理はステップ205に移行する。
多地点同時雷撃判定プログラム122は、処理対象の雷撃が多地点同時雷撃を構成する雷撃であると判定する。
多地点同時雷撃判定プログラム122は、処理対象の雷撃が多重雷撃を構成する雷撃であると判定する。
(i)本発明の実施形態による落雷位置標定システムでは、第一雷撃から1秒以内に発生した雷撃を特定する処理と、受信局から受信した観測データを用いて、複数の雷撃を標定する処理と、処理対象の雷撃と直前の雷撃との発生時間差、処理対象の雷撃と第一雷撃との波高値の比率、及び処理対象の雷撃と第一雷撃との距離に基づいて、処理対象の雷撃が多地点同時雷撃であるか判定する処理と、判定する処理による判定結果と共に、落雷の標定結果を出力する処理と、を実行する。このような処理を実行することにより、雷撃が多地点同時雷撃か否か判断することができ、落雷をより正確に標定することができるようになる。
10 落雷位置標定装置
110 入出力装置
111 表示装置
112 キーボード
113 ポインティングデバイス
100 中央処理装置
120 プログラムメモリ
121 雷撃位置標定プログラム
122 多地点同時雷撃判定プログラム
123 標定結果提示プログラム
130 記憶装置
131 受信局座標データ
132 地図データ
140−1乃至140−n 受信局
150 ネットワーク
Claims (8)
- 落雷による電磁波を検知し、観測データを送信する複数の受信局と、
前記複数の受信局のそれぞれからの前記観測データを受信し、落雷位置を標定する落雷位置標定装置と、を有し、
前記落雷位置標定装置は、
第一雷撃から1秒以内に発生した雷撃を特定する処理と、
前記受信局から受信した前記観測データを用いて、複数の雷撃を標定する処理と、
処理対象の雷撃と直前の雷撃との発生時間差、処理対象の雷撃と前記第一雷撃との波高値の比率、及び処理対象の雷撃と前記第一雷撃との距離に基づいて、前記処理対象の雷撃が多地点同時雷撃であるか判定する処理と、
前記判定する処理による判定結果と共に、落雷の標定結果を出力する処理と、
を実行する、落雷位置標定システム。 - 請求項1において、
前記落雷位置標定装置は、前記判定する処理において、前記処理対象の雷撃と前記直前の雷撃との発生時間差が30ms以上であるか否かによって前記処理対象の雷撃が多地点同時雷撃であるか判定する、落雷位置標定システム。 - 請求項1又は2において、
前記落雷位置標定装置は、前記判定する処理において、前記処理対象の雷撃と前記第一雷撃との波高値の比率が80%以上であるか否かによって前記処理対象の雷撃が多地点同時雷撃であるか判定する、落雷位置標定システム。 - 請求項1乃至3の何れか1項において、
前記落雷位置標定装置は、前記判定する処理において、前記処理対象の雷撃と前記第一雷撃との距離が1km以内か否かによって前記処理対象の雷撃が多地点同時雷撃であるか判定する、落雷位置標定システム。 - 請求項1乃至4の何れか1項において、
前記落雷位置標定装置は、前記判定する処理において、さらに、前記処理対象の雷撃の誤差楕円が他の雷撃の誤差楕円と重なっているか否かによって前記処理対象の雷撃が多地点同時雷撃であるか判定する、落雷位置標定システム。 - 請求項1乃至5の何れか1項において、
前記落雷位置標定装置は、さらに、前記判定結果に基づいて、前記落雷のエネルギーを算出し、前記出力する処理において前記算出した落雷のエネルギーを出力する、落雷位置標定システム。 - 落雷による電磁波を検知して観測データを送信する複数の受信局のそれぞれからの前記観測データを受信し、落雷位置を標定する落雷位置標定装置であって、
前記落雷位置を標定する処理を実行するプロセッサを備え、
前記プロセッサは、
第一雷撃から1秒以内に発生した雷撃を特定する処理と、
前記受信局から受信した前記観測データを用いて、複数の雷撃を標定する処理と、
処理対象の雷撃と直前の雷撃との発生時間差、処理対象の雷撃と前記第一雷撃との波高値の比率、及び処理対象の雷撃と前記第一雷撃との距離に基づいて、前記処理対象の雷撃が多地点同時雷撃であるか判定する処理と、
前記判定する処理による判定結果と共に、落雷の標定結果を出力する処理と、
を実行する、落雷位置標定装置。 - 落雷による電磁波を検知して観測データを送信する複数の受信局のそれぞれからの前記観測データを用いて落雷位置を標定する落雷位置標定方法であって、
前記落雷位置を標定する処理を実行するプロセッサが、第一雷撃から1秒以内に発生した雷撃を特定することと、
前記プロセッサが、前記受信局から受信した前記観測データを用いて、複数の雷撃を標定することと、
前記プロセッサが、処理対象の雷撃と直前の雷撃との発生時間差、処理対象の雷撃と前記第一雷撃との波高値の比率、及び処理対象の雷撃と前記第一雷撃との距離に基づいて、前記処理対象の雷撃が多地点同時雷撃であるか判定することと、
前記プロセッサが、前記多地点同時雷撃に関する判定結果と共に、落雷の標定結果を出力することと、
を含む、落雷位置標定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016072905A JP6649160B2 (ja) | 2016-03-31 | 2016-03-31 | 落雷位置標定システム、落雷位置標定装置、及び落雷位置標定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016072905A JP6649160B2 (ja) | 2016-03-31 | 2016-03-31 | 落雷位置標定システム、落雷位置標定装置、及び落雷位置標定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017181457A true JP2017181457A (ja) | 2017-10-05 |
| JP6649160B2 JP6649160B2 (ja) | 2020-02-19 |
Family
ID=60005399
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016072905A Active JP6649160B2 (ja) | 2016-03-31 | 2016-03-31 | 落雷位置標定システム、落雷位置標定装置、及び落雷位置標定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6649160B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113075461A (zh) * | 2021-02-21 | 2021-07-06 | 珠海复旦创新研究院 | 基于宽带甚高频辐射信号探测的超短基线闪电三维定位方法 |
| CN113850908A (zh) * | 2021-09-23 | 2021-12-28 | 云南电网有限责任公司电力科学研究院 | 一种考虑路径延长因素的地闪回击定位数据的优化方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4272720A (en) * | 1979-05-30 | 1981-06-09 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Lightning discharge identification system |
| JPS62145179U (ja) * | 1986-03-10 | 1987-09-12 | ||
| JPH039290A (ja) * | 1989-06-06 | 1991-01-17 | Sankooshiya:Kk | 多地点同時雷撃観測装置 |
| JPH07159546A (ja) * | 1993-12-08 | 1995-06-23 | Nec Corp | 雷位置標定装置 |
| JP2010146398A (ja) * | 2008-12-19 | 2010-07-01 | Chugoku Electric Power Co Inc:The | 巡視支援システム、巡視支援方法およびプログラム |
-
2016
- 2016-03-31 JP JP2016072905A patent/JP6649160B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4272720A (en) * | 1979-05-30 | 1981-06-09 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Lightning discharge identification system |
| JPS62145179U (ja) * | 1986-03-10 | 1987-09-12 | ||
| JPH039290A (ja) * | 1989-06-06 | 1991-01-17 | Sankooshiya:Kk | 多地点同時雷撃観測装置 |
| JPH07159546A (ja) * | 1993-12-08 | 1995-06-23 | Nec Corp | 雷位置標定装置 |
| JP2010146398A (ja) * | 2008-12-19 | 2010-07-01 | Chugoku Electric Power Co Inc:The | 巡視支援システム、巡視支援方法およびプログラム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113075461A (zh) * | 2021-02-21 | 2021-07-06 | 珠海复旦创新研究院 | 基于宽带甚高频辐射信号探测的超短基线闪电三维定位方法 |
| WO2022174486A1 (zh) * | 2021-02-21 | 2022-08-25 | 珠海复旦创新研究院 | 基于宽带甚高频辐射信号探测的超短基线闪电三维定位方法 |
| CN113850908A (zh) * | 2021-09-23 | 2021-12-28 | 云南电网有限责任公司电力科学研究院 | 一种考虑路径延长因素的地闪回击定位数据的优化方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6649160B2 (ja) | 2020-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6578229B2 (ja) | 落雷位置標定システム、落雷位置標定装置、及び落雷位置標定方法 | |
| US11328429B2 (en) | Method and apparatus for detecting ground point cloud points | |
| US11423785B2 (en) | Multi satellite detection and tracking of moving objects | |
| CN113031031B (zh) | 一种城市峡谷内基于gnss信号精确分类的加权定位方法 | |
| US7211994B1 (en) | Lightning and electro-magnetic pulse location and detection for the discovery of land line location | |
| US10317574B2 (en) | System and method for identification and/or nowcasting of hail events | |
| US12025713B2 (en) | Method for GPS spoofing detection with GPS receivers leveraging inaccuracies of GPS spoofing devices and apparatus therefore | |
| US11442173B2 (en) | GNSS-based timing synchronization | |
| KR20220004939A (ko) | 차선 검출 방법, 장치, 전자기기, 저장 매체 및 차량 | |
| WO2010062418A2 (en) | Method and system for locating signal jammers | |
| KR102350194B1 (ko) | Gps 기만 신호 생성 장치의 부정확성으로 인해 생기는 gps 수신기 출력값의 차이를 이용한 gps 기만 공격 탐지 방법 및 그 장치 | |
| EP3722997B1 (en) | Method and apparatus for automatic detection of antenna site conditions | |
| US11079461B2 (en) | Consistent arrival time measurement and determination of discharge polarity | |
| CN113970761A (zh) | 一种非视距信号识别方法、系统、计算机设备和存储介质 | |
| CN110244337A (zh) | 一种隧道内目标对象的定位方法及装置 | |
| Diendorfer et al. | Euclid located strokes to the gaisberg tower–accuracy of location and its assigned confidence ellipse | |
| CN109059916A (zh) | 一种基于惯导的浮空器掩星预报方法 | |
| CN104918213B (zh) | 用于地理围栏检测的方法和装置 | |
| JP6649160B2 (ja) | 落雷位置標定システム、落雷位置標定装置、及び落雷位置標定方法 | |
| Zhong et al. | Optimizing LOS/NLOS modeling and solution determination for 3D-mapping-aided GNSS positioning | |
| CN116045961A (zh) | 导航方法、装置、电子设备及存储介质 | |
| CN120178181A (zh) | 一种雷达台站的遮蔽影响评估方法及系统 | |
| Lafkovici | A performance analysis of the North American Lightning Detection Network using CN Tower lightning data | |
| JP2016200406A (ja) | 落雷位置標定システム、及び落雷位置標定装置 | |
| Alghananim et al. | The first calibration model for bluetooth angle of arrival: Enhancing positioning accuracy in indoor environments |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181015 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190604 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6649160 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |