JP2017182113A - ワーク判定装置及び方法 - Google Patents
ワーク判定装置及び方法 Download PDFInfo
- Publication number
- JP2017182113A JP2017182113A JP2016063152A JP2016063152A JP2017182113A JP 2017182113 A JP2017182113 A JP 2017182113A JP 2016063152 A JP2016063152 A JP 2016063152A JP 2016063152 A JP2016063152 A JP 2016063152A JP 2017182113 A JP2017182113 A JP 2017182113A
- Authority
- JP
- Japan
- Prior art keywords
- image
- template
- edge
- workpiece
- work
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 53
- 238000003708 edge detection Methods 0.000 claims abstract description 40
- 238000001514 detection method Methods 0.000 claims abstract description 28
- 238000000605 extraction Methods 0.000 claims abstract description 18
- 238000003384 imaging method Methods 0.000 description 13
- 238000005452 bending Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000003754 machining Methods 0.000 description 3
- 239000000284 extract Substances 0.000 description 2
- 230000012447 hatching Effects 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000002950 deficient Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 238000004080 punching Methods 0.000 description 1
Images























Landscapes
- Manipulator (AREA)
- Image Analysis (AREA)
Abstract
【課題】ワークが載置場所に表裏が正しい状態で配置されているかを判定することができるワーク判定装置を提供する。
【解決手段】テンプレート画像エッジ検出部34は、載置場所に配置されているワークとパターンマッチングさせるためのテンプレートエッジ画像を生成する。ワーク撮影画像エッジ検出部35は、ワークを撮影したワーク撮影画像データのワーク撮影エッジ画像を生成する。ワーク位置検出部361は、テンプレートエッジ画像とワーク撮影エッジ画像とをマッチングさせて、ワークの位置を検出する。表裏判定用特徴画像抽出部38はテンプレート裏画像を生成し、テンプレート画像から、テンプレート画像とテンプレート裏画像とが重なり合うエッジを差し引いて表裏判定用特徴画像を抽出する。表裏判定部362は、表裏判定用特徴画像をワークの位置に移動させ、ワーク撮影エッジ画像と表裏判定用特徴画像との類似度を算出して、ワークの表裏を判定する。
【選択図】図4
【解決手段】テンプレート画像エッジ検出部34は、載置場所に配置されているワークとパターンマッチングさせるためのテンプレートエッジ画像を生成する。ワーク撮影画像エッジ検出部35は、ワークを撮影したワーク撮影画像データのワーク撮影エッジ画像を生成する。ワーク位置検出部361は、テンプレートエッジ画像とワーク撮影エッジ画像とをマッチングさせて、ワークの位置を検出する。表裏判定用特徴画像抽出部38はテンプレート裏画像を生成し、テンプレート画像から、テンプレート画像とテンプレート裏画像とが重なり合うエッジを差し引いて表裏判定用特徴画像を抽出する。表裏判定部362は、表裏判定用特徴画像をワークの位置に移動させ、ワーク撮影エッジ画像と表裏判定用特徴画像との類似度を算出して、ワークの表裏を判定する。
【選択図】図4
Description
本発明は、ワークが載置場所に表裏が正しい状態で配置されているかを判定することができるワーク判定装置及び方法に関する。
ベンディングマシン等の加工機で金属のワークを加工する際に、所定の載置場所に配置されているワークをワーク保持用ロボットで保持させて、加工機に搬入することがある。この場合、画像演算処理装置が、パターンマッチング用のテンプレート画像と、載置場所に配置されているワークをカメラによって撮影した撮影画像とをパターンマッチングさせることによって、ワークが載置場所内のどこにどのような向きで配置されているかを検出することができる。
作業者が誤って載置場所にワークを裏向きに配置してしまうことがある。ワークの表面と裏面とで特徴差が小さいと、表向きに配置されたワークと裏向きに配置されたワークとで、画像演算処理装置によるテンプレート画像とワークの撮影画像とのパターンマッチングによる合致率に大差が出ないことがある。
すると、裏向きに配置されたワークがワーク保持用ロボットで保持されて加工機によって加工されてしまう。裏向きに配置されたワークが加工された製品は不良品となってしまう。
このような問題を解決するために、ワークの表面用及び裏面用それぞれのテンプレート画像を用意し、ワークの撮影画像と表面用及び裏面用それぞれのテンプレート画像とをパターンマッチングさせることが考えられる。ワークの撮影画像と表面用のテンプレート画像とのパターンマッチングによる合致率が、ワークの撮影画像と裏面用のテンプレート画像とのパターンマッチングによる合致率よりも高ければ、ワークは正しく表向きに配置されていると判定することができる。
しかしながら、ワークの撮影画像と表面用及び裏面用それぞれのテンプレート画像とをパターンマッチングさせる方法では、パターンマッチングに要する処理時間が2倍必要となり、非効率的である。パターンマッチングに要する処理時間をさほど増大させることなく、効率的かつ的確にワークの表裏を判定する方法が求められる。
本発明は、ワークが載置場所に表裏が正しい状態で配置されているかを効率的かつ的確に判定することができるワーク判定装置及び方法を提供することを目的とする。
本発明は、上述した従来の技術の課題を解決するため、載置場所に配置されているワークとパターンマッチングさせるためのテンプレート画像のエッジを検出して、テンプレートエッジ画像を生成するテンプレート画像エッジ検出部と、前記載置場所に配置されているワークを撮影したワーク撮影画像データのエッジを検出して、ワーク撮影エッジ画像を生成するワーク撮影画像エッジ検出部と、前記テンプレートエッジ画像と前記ワーク撮影エッジ画像とをマッチングさせて、前記載置場所に配置されている前記ワークの位置を検出するワーク位置検出部と、前記テンプレート画像の表裏を反転させて前記ワークの裏面を示すテンプレート裏画像を生成し、前記テンプレート画像から、前記テンプレート画像と前記テンプレート裏画像とが重なり合うエッジを差し引くことにより、前記ワークの表裏を判定するための表裏判定用特徴画像を抽出する表裏判定用特徴画像抽出部と、前記表裏判定用特徴画像を前記ワーク位置検出部によって検出された前記ワークの位置に移動させ、前記ワーク撮影エッジ画像と前記表裏判定用特徴画像との類似度を算出して、類似度に基づいて前記載置場所に配置されている前記ワークの表裏を判定する表裏判定部とを備えることを特徴とするワーク判定装置を提供する。
また、本発明は、上述した従来の技術の課題を解決するため、載置場所に配置されているワークとパターンマッチングさせるためのテンプレート画像のエッジを検出して、テンプレートエッジ画像を生成するテンプレート画像エッジ検出工程と、前記載置場所に配置されているワークを撮影したワーク撮影画像データのエッジを検出して、ワーク撮影エッジ画像を生成するワーク撮影画像エッジ検出工程と、前記テンプレートエッジ画像と前記ワーク撮影エッジ画像とをマッチングさせて、前記載置場所に配置されている前記ワークの位置を検出するワーク位置検出工程と、前記テンプレート画像の表裏を反転させて前記ワークの裏面を示すテンプレート裏画像を生成し、前記テンプレート画像から、前記テンプレート画像と前記テンプレート裏画像とが重なり合うエッジを差し引くことにより、前記ワークの表裏を判定するための表裏判定用特徴画像を抽出する表裏判定用特徴画像抽出工程と、前記表裏判定用特徴画像を前記ワーク位置検出工程にて検出された前記ワークの位置に移動させ、前記ワーク撮影エッジ画像と前記表裏判定用特徴画像との類似度を算出して、類似度に基づいて前記載置場所に配置されている前記ワークの表裏を判定する表裏判定工程とを含むことを特徴とするワーク判定方法を提供する。
本発明のワーク判定装置及び方法によれば、ワークが載置場所に表裏が正しい状態で配置されているかを効率的かつ的確に判定することができる。
以下、一実施形態のワーク判定装置及び方法について、添付図面を参照して説明する。
まず、図1を用いて、載置場所に配置されているワークをワーク保持用ロボットで保持させて、加工機に搬入するように構成されている加工システムの全体的な構成例を説明する。図1に示す構成例において、加工機10はベンディングマシンであり、ワーク保持用ロボット20は、ワークを吸着または把持してベンディングマシンへと搬送するワーク搬送ロボットである。
加工機はベンディングマシンに限定されることはなく、パンチングマシン、レーザマシン等の任意の加工機でよい。
加工機10は、上下方向に移動自在の上部テーブル101と、固定されている下部テーブル102とを有する。上部テーブル101にはパンチ金型Tpが装着され、下部テーブル102にはダイ金型Tdが装着されている。加工機10には、後述するNC装置2(図3に図示)と接続された表示・操作部21(操作ペンダント)が装着されている。
加工機10の前方には、多関節のワーク保持用ロボット20が設置されている。ワーク保持用ロボット20はガイドレール201上に配置されており、ガイドレール201に沿って移動自在に構成されている。
ワーク保持用ロボット20の前方には、ワークWの載置場所であるローディング台30が設置されている。ワークWは、図2に示すような所定の形状を有する金属の板材である。ここでは、ワークWは矩形状であり、部分的な切り起こし部W0を有する。切り起こし部W0は、細長く切り欠いた矩形状の穴W01と、穴W01の両端に連結し、穴W01の長手方向と直交する方向に伸びた切り込みW02及びW03を有する。ローディング台30には、複数枚のワークWが積み重ねられている。
複数枚のワークWは、ローディング台30に、面方向の位置がずれないように正確に積み重ねられているとは限らず、図1に示すように、面方向の位置がずれた状態で積み重ねられていることがある。ワークWが図1に示すように配置されている状態が、ワークWが正しく表向きに配置されている状態であるとする。
ローディング台30の近傍には、ローディング台30の設置面に対して所定の高さまで延びる支柱401が配置されている。支柱401は、所定の高さまで垂直方向に延び、ローディング台30側に水平方向に折れ曲がり、さらに、加工機10の方向へと折れ曲がっている。支柱401の先端部には、カメラ4が装着されている。
カメラ4は、ローディング台30に置かれたワークWを撮影するように構成されている。ローディング台30上でのワークWの位置はずれることがあるから、カメラ4は、ローディング台30の全体を撮影するのがよい。例えば、ローディング台30の角部P0の位置を、カメラ4がローディング台30を撮影した撮影画像の原点とする。ワーク保持用ロボット20の原点位置は、撮影画像の原点と一致するように設定されている。
図3を用いて、加工機10及びワーク保持用ロボット20を制御する制御装置の構成及び動作を説明する。図3において、CAM1は、図示していないCADで生成されたワークWを示すCADデータを保持している。NC装置2は、加工機10を制御する。表示・操作部21は、NC装置2に接続されている。
NC装置2には、画像演算処理装置3とロボット制御装置5が接続されている。画像演算処理装置3は、本実施形態のワーク判定装置を構成する。画像演算処理装置3は、例えばパーソナルコンピュータで構成することができる。画像演算処理装置3には、カメラ4が接続されている。
後述するように、画像演算処理装置3は、ローディング台30に置かれたワークWの位置を検出し、検出した位置情報をロボット制御装置5に供給する。画像演算処理装置3は、ワークWの位置を検出するのに併せて、ワークWがローディング台30に表裏が正しい状態で配置されているかを判定する。ロボット制御装置5は、ワークWが表向きに配置されていれば、ワークWの位置情報に基づいてワーク保持用ロボット20を制御する。
図3に示す構成例では、加工機10を制御するNC装置2と、ワーク判定装置を構成する画像演算処理装置3と、ワーク保持用ロボット20を制御するロボット制御装置5とを別々に設けているが、これは単なる一例である。
NC装置2に画像演算処理装置3の機能を持たせることによって、NC装置2がワーク判定装置を構成してもよい。NC装置2とロボット制御装置5とが一体化されていてもよい。ロボット制御装置5に画像演算処理装置3の機能を持たせることによって、ロボット制御装置5がワーク判定装置を構成してもよい。
図3において、CAM1は、CADデータをNC装置2に転送する。NC装置2は、受け取ったCADデータを画像演算処理装置3に転送する。
図4を用いて、画像演算処理装置3の機能的な内部構成を説明する。図4に示すように、画像演算処理装置3は、テンプレート画像作成部31,テンプレート画像塗りつぶし部32,テンプレート画像拡大縮小・回転処理部33,テンプレート画像エッジ検出部34を有する。
また、画像演算処理装置3は、ワーク撮影画像エッジ検出部35,マッチング処理部36,表裏判定用特徴画像抽出部38を有する。マッチング処理部36は、ワーク位置検出部361と表裏判定部362とを含む。
テンプレート画像作成部31〜マッチング処理部36、及び、表裏判定用特徴画像抽出部38のそれぞれは、ソフトウェアモジュールによって構成することができる。テンプレート画像作成部31〜マッチング処理部36、及び、表裏判定用特徴画像抽出部38の少なくとも一部をハードウェアによって構成してもよい。ソフトウェアとハードウェアとを組み合わせてもよく、両者の使い分けは任意である。
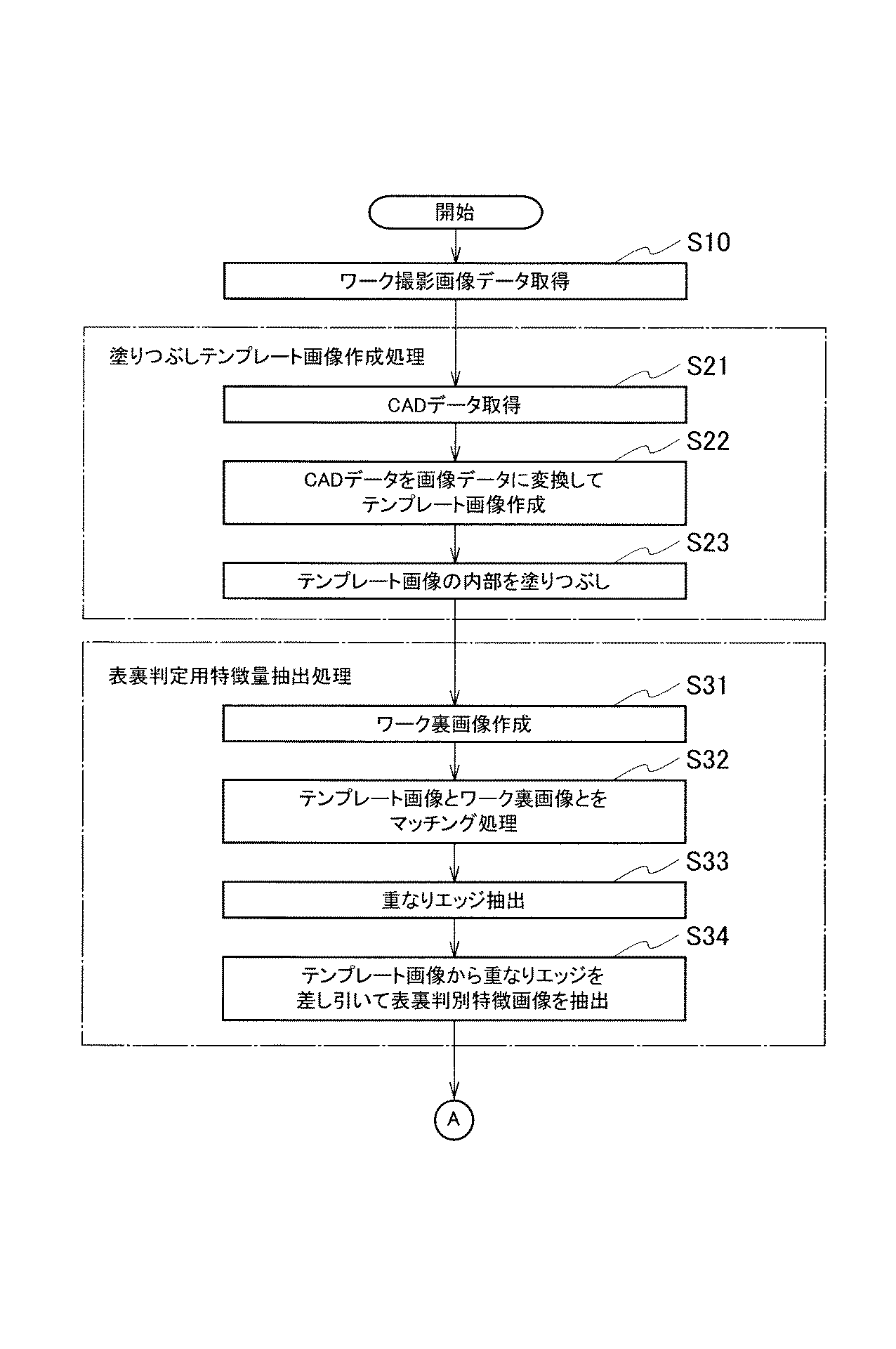
図4に示す画像演算処理装置3の動作を、図5A〜図5Dのフローチャートを参照しながら説明する。図5Aにおいて、ワーク撮影画像エッジ検出部35は、ステップS10にて、カメラ4より出力されたワーク撮影画像データを取得する。ワーク撮影画像データは、カメラ4がローディング台30に置かれたワークWを撮影したデジタル静止画像データである。
図6は、ワーク撮影画像データが示すワーク撮影画像W30を概念的に示している。ワーク撮影画像W30は、ローディング台30上で最上位に配置されたワークWの画像を含む。
テンプレート画像作成部31は、ステップS21にて、NC装置2より転送されたCADデータを取得する。テンプレート画像作成部31は、ステップS22にて、CADデータを画像データに変換して、図7に示すようなテンプレート画像TWを作成する(テンプレート画像作成工程)。テンプレート画像TWは、ワークWを示すワーク線画像ImWを含む。図7〜図12,図19及び図20において、一点鎖線で示す矩形はそれぞれの画像(画像データ)の外縁を示している。
CADデータは、例えば、ワークWの形状の各点を示す座標がCSV形式で表されているデータである。テンプレート画像作成部31は、CSV形式のデータに基づいてワークWの形状を示すワーク線画像ImWを含むテンプレート画像TWを作成する。ワーク線画像ImWは、ワークWの外形線を示す画像である。ワークWは図2に示すように面内に切り起こし部W0を有するので、ワーク線画像ImWは、切り起こし部W0を示す切り起こし画像ImW0を含む。
このときのワーク線画像ImWの大きさは、ワークWの実寸に即した大きさである必要がある。そこで、予め1画素当たりの長さを求めておけば、テンプレート画像作成部31は、ワークWの寸法を何画素で表現すればよいかを算出することができる。テンプレート画像作成部31は、算出した画素数となるようにワーク線画像ImWを描画する。
具体的には、1画素の長さが0.5mmに相当し、ワークWの所定部分の長さが10cmであったとすれば、その部分を200画素で表現すればよい。
テンプレート画像塗りつぶし部32は、ステップS23にて、ワーク線画像ImWの内部を例えば白で塗りつぶす(塗りつぶしテンプレート画像作成工程)。図8は、ワーク線画像ImWの外形線の内部を塗りつぶしたワーク塗りつぶし画像ImWwを含むテンプレート画像TWwを示している。図8におけるハッチングは、ワーク線画像ImWの内部を塗りつぶしていることを示す。以下、テンプレート画像TWwを塗りつぶしテンプレート画像TWwと称することとする。
図8に示すように、切り起こし画像ImW0の内部は塗りつぶさないのがよい。テンプレート画像塗りつぶし部32は、ワーク線画像ImWの外形線の内部で、内部に存在する閉じた領域以外を所定の色で塗りつぶせばよい。ワーク線画像ImWの内部を塗りつぶしてワーク塗りつぶし画像ImWwとする理由については後述する。
図5AにおけるステップS21〜S23は、CADデータに基づいて、パターンマッチング用のテンプレート画像(塗りつぶしテンプレート画像TWw)を作成する塗りつぶしテンプレート画像作成処理を示している。
ところで、CADデータに基づいてパターンマッチング用のテンプレート画像を作成するのではなく、予め、作業者が、カメラによってワークを撮影してパターンマッチング用のテンプレート画像を作成してもよい。但し、作業者が、ワークを撮影してパターンマッチング用のテンプレート画像を作成するのは煩雑である。よって、CADデータに基づいてパターンマッチング用のテンプレート画像を作成することが好ましい。
表裏判定用特徴画像抽出部38には、テンプレート画像塗りつぶし部32によって生成された塗りつぶしテンプレート画像TWwが供給される。表裏判定用特徴画像抽出部38には、ステップS31にて、塗りつぶしテンプレート画像TWwをの表裏を反転させることによって、図9に示すテンプレート裏画像ITWwを作成する。テンプレート裏画像ITWwは、ワーク線画像ImWを反転した反転ワーク塗りつぶし画像ImIWwを含む。反転ワーク塗りつぶし画像ImIWwは、反転切り起こし画像ImIW0を含む。
表裏判定用特徴画像抽出部38は、ステップS32にて、図8に示す塗りつぶしテンプレート画像TWwと、図9に示すテンプレート裏画像ITWwとをマッチングさせる。塗りつぶしテンプレート画像TWwとテンプレート裏画像ITWwとをマッチングさせると、図10に示すようになる。表裏判定用特徴画像抽出部38は、ステップS33にて、図11に示すように、重なり合ったエッジ(重なりエッジ)EOLを抽出する。
表裏判定用特徴画像抽出部38は、ステップS34にて、塗りつぶしテンプレート画像TWwから重なりエッジEOLを差し引いて、図12に示す表裏判定用特徴画像FWを抽出する(表裏判定用特徴画像抽出工程)。表裏判定用特徴画像FWは、塗りつぶしテンプレート画像TWwから切り起こし画像ImW0のみを抽出した画像に相当する。
図5AにおけるステップS31〜S34は、塗りつぶしテンプレート画像TWwより表裏判定用特徴画像FWを抽出する表裏判定用特徴画像抽出処理を示している。
テンプレート画像拡大縮小・回転処理部33は、図5BのステップS41にて、塗りつぶしテンプレート画像TWwを拡大または縮小する最低倍率をmin、最大倍率をmax、倍率の増分をkと設定する。
ローディング台30上のワークWをカメラ4で撮影するとき、積み重ねられているワークWの枚数によって最上位のワークWの撮影画像の大きさは変化する。塗りつぶしテンプレート画像TWwを最低倍率minから最大倍率maxの範囲で増分kごとに拡大または縮小させれば、ワークWの撮影画像の大きさが変化しても、塗りつぶしテンプレート画像TWwをワークWの撮影画像の大きさとほぼ一致させることができる。
テンプレート画像拡大縮小・回転処理部33は、ステップS42にて、倍率bをminと設定し、ステップS43にて、塗りつぶしテンプレート画像TWwをb倍する(テンプレート画像拡大縮小工程)。
テンプレート画像拡大縮小・回転処理部33は、ステップS44にて、塗りつぶしテンプレート画像TWwの角度iを0°に初期化する。例えば、図8に示す塗りつぶしテンプレート画像TWwの左右方向の辺がワーク撮影画像W30の水平方向と平行となる角度を角度0°とすればよい。
テンプレート画像拡大縮小・回転処理部33は、ステップS45にて、塗りつぶしテンプレート画像TWwを角度iだけ回転させる(テンプレート画像回転工程)。但し、ステップS44からステップS45に移行した場合、角度iは0°であるから、実質的には、テンプレート画像拡大縮小・回転処理部33は、塗りつぶしテンプレート画像TWwを回転させない。
テンプレート画像エッジ検出部34は、図5CのステップS51にて、塗りつぶしテンプレート画像TWwのエッジを検出する(テンプレート画像エッジ検出工程)。テンプレート画像エッジ検出部34は、塗りつぶしテンプレート画像TWwのエッジを検出するために、ソーベル変換を用いるのが好適である。
図13の(a)は、塗りつぶしテンプレート画像TWwの水平方向のエッジを検出するためのフィルタであり、図13の(b)は塗りつぶしテンプレート画像TWwの垂直方向のエッジを検出するためのフィルタである。それぞれのフィルタは3行3列の係数行列によって構成される。
テンプレート画像エッジ検出部34は、ある注目画素を中心として、注目画素と、注目画素の上下左右及び斜め方向の8画素との合計9画素に対して、図13の(a)に示すフィルタのそれぞれ対応する位置の係数を乗算する。テンプレート画像エッジ検出部34は、9画素それぞれの乗算結果を加算して水平方向のエッジを検出する。
また、テンプレート画像エッジ検出部34は、注目画素を中心とした9画素に対して、図13の(b)のフィルタのそれぞれ対応する位置の係数を乗算する。テンプレート画像エッジ検出部34は、9画素それぞれの乗算結果を加算して垂直方向のエッジを検出する。
テンプレート画像エッジ検出部34は、検出した水平方向のエッジと垂直方向のエッジとを加算することによって、塗りつぶしテンプレート画像TWwのエッジを検出する。
このとき、テンプレート画像エッジ検出部34は、エッジを構成するそれぞれの画素において、エッジの強度と勾配方向を算出するのがよい。図14において、それぞれの円は画素を示している。ハッチングを付して示す注目画素に対して、ソーベル変換によって水平方向のエッジの値(エッジ強度Eh)が5、垂直方向のエッジの値(エッジ強度Ev)が1と検出されたとする。
図14に示すように、水平方向のエッジ強度Ehと、垂直方向のエッジ強度Evは、それぞれ、水平方向のベクトルEh、垂直方向のベクトルEvと考えることができる。
水平方向のベクトルEhと垂直方向のベクトルEvとの合成ベクトルEhvの大きさはそれぞれの画素におけるエッジ強度、合成ベクトルEhvの方向はエッジ勾配方向を示す。エッジ強度Emagnitudeは式(1)で、エッジ勾配方向Edirectionは式(2)で表すことができる。
テンプレート画像エッジ検出部34は、塗りつぶしテンプレート画像TWwのエッジを構成する全ての画素において、エッジ強度Emagnitudeとエッジ勾配方向Edirectionとを求める。
テンプレート画像エッジ検出部34は、エッジ強度Emagnitudeのみを求めてもよく、エッジ勾配方向Edirectionのみを求めてもよい。テンプレート画像エッジ検出部34は、少なくともエッジ強度Emagnitudeを求めるのがよく、エッジ強度Emagnitudeとエッジ勾配方向Edirectionとの双方を求めるとさらによい。
図5Cに戻り、ワーク撮影画像エッジ検出部35は、ステップS52にて、ワーク撮影画像データに基づき、ワーク撮影画像W30のエッジを検出する(ワーク撮影画像エッジ検出工程)。ワーク撮影画像エッジ検出部35は、ワーク撮影画像W30のエッジを検出する前にノイズ低減処理を施してもよい。
ワーク撮影画像エッジ検出部35は、テンプレート画像エッジ検出部34と同様に、図13の(a)及び(b)のフィルタを用いるソーベル変換によってワーク撮影画像W30のエッジを検出する。ワーク撮影画像エッジ検出部35は、テンプレート画像エッジ検出部34と同様に、ワーク撮影画像W30のエッジを構成する全ての画素において、エッジ強度Emagnitudeとエッジ勾配方向Edirectionとを求めるのがよい。
ワーク撮影画像エッジ検出部35は、エッジ強度Emagnitudeのみを求めてもよく、エッジ勾配方向Edirectionのみを求めてもよい。ワーク撮影画像エッジ検出部35は、少なくともエッジ強度Emagnitudeを求めるのがよく、エッジ強度Emagnitudeとエッジ勾配方向Edirectionとの双方を求めるとさらによい。
マッチング処理部36は、ステップS53にて、ワーク撮影画像W30のエッジと塗りつぶしテンプレート画像TWwのエッジとをマッチング処理する(マッチング処理工程)。
ここで、テンプレート画像塗りつぶし部32がワーク線画像ImWの内部を塗りつぶして塗りつぶしテンプレート画像TWwとする理由を説明する。
図15の(a)は、テンプレート画像TWのエッジ近傍の画素値を示している。図15の(a)の左方向がワーク線画像ImWの外側、右方向がワーク線画像ImWの内側である。テンプレート画像TWをソーベル変換すると、エッジが互いの間に間隔を有する2本線の状態で検出されてしまう。
図15の(b)は、塗りつぶしテンプレート画像TWwのエッジ近傍の画素値を示している。同様に、図15の(b)の左方向がワーク塗りつぶし画像ImWwの外側、右方向がワーク塗りつぶし画像ImWwの内側である。塗りつぶしテンプレート画像TWwをソーベル変換することにより、エッジは太くはなるものの間隔を有さない2本線の状態、即ち、実質的に1本線の状態となり、エッジが適切に検出される。
仮に、マッチング処理部36が、ワーク撮影画像W30のエッジとエッジが間隔を有する2本線の状態で検出されたテンプレート画像TWのエッジとをマッチング処理すると、誤差が発生して適切なマッチング処理が行われない。マッチング処理部36が、ワーク撮影画像W30のエッジと塗りつぶしテンプレート画像TWwのエッジとをマッチング処理することによって、適切なマッチング処理が行われる。
図16を用いて、マッチング処理部36によるマッチング処理の詳細を説明する。図16において、ETWは、テンプレート画像エッジ検出部34が塗りつぶしテンプレート画像TWwをソーベル変換したテンプレートエッジ画像を概念的に示している。EW30は、ワーク撮影画像W30をソーベル変換したワーク撮影エッジ画像を概念的に示している。
図16においては、理解を容易にするために、テンプレートエッジ画像ETWとワーク撮影エッジ画像EW30のそれぞれのエッジを構成する画素を拡大して概念的に示している。
マッチング処理部36は、ワーク撮影エッジ画像EW30の所定位置にテンプレートエッジ画像ETWを配置して両者の類似度を算出し、テンプレートエッジ画像ETWを水平方向または垂直方向に1画素ずつずらしながら両者の類似度を算出する。
図16に示すように、テンプレートエッジ画像ETWの画素P1とワーク撮影エッジ画像EW30の画素P32とが対応する位置にあるとき、マッチング処理部36は、両者の類似度を算出する。マッチング処理部36は、テンプレートエッジ画像ETWのそれぞれのエッジの画素とワーク撮影エッジ画像EW30の画素との類似度を算出する。
マッチング処理部36は、例えば、テンプレートエッジ画像ETWの画素とワーク撮影エッジ画像EW30の対応する位置の画素の値の差分値を求め、全ての画素について差分値を積分した積分値を、テンプレートエッジ画像ETWとワーク撮影エッジ画像EW30との全体の類似度とすることができる。この場合、積分値が小さいほど類似度が高くなる。
図16の場合、ワーク撮影エッジ画像EW30のエッジとテンプレートエッジ画像ETWのエッジとは位置がずれているので、類似度は比較的小さくなる。
図17は、マッチング処理部36がテンプレートエッジ画像ETWをずらして、テンプレートエッジ画像ETWの画素P1とワーク撮影エッジ画像EW30の画素P312とが対応する位置にある状態を示している。図17の場合、ワーク撮影エッジ画像EW30のエッジとテンプレートエッジ画像ETWのエッジとは位置が近いので、類似度は比較的大きくなる。
このように、マッチング処理部36は、テンプレートエッジ画像ETWを水平方向または垂直方向に1画素ずつずらしながら、テンプレートエッジ画像ETWとワーク撮影エッジ画像EW30とが最も類似するテンプレートエッジ画像ETWの位置を探索する。
マッチング処理部36は、上述した水平方向のエッジ強度Ehと垂直方向のエッジ強度Evとエッジ強度Emagnitudeとを用いて、類似度を算出してもよい。テンプレートエッジ画像ETWにおける画素の水平方向のエッジ強度Eh1、垂直方向のエッジ強度Ev1、エッジ強度EmagnitudeをEm1、ワーク撮影エッジ画像EW30における画素の水平方向のエッジ強度Eh3、垂直方向のエッジ強度Ev3、エッジ強度EmagnitudeをEm3とすると、対応する位置の画素の類似度Dsは、式(3)によって求めることができる。
Ds=(Eh1×Eh3+Ev1×Ev3)/(Em1×Em3) …(3)
マッチング処理部36は、テンプレートエッジ画像ETWの全ての画素についてワーク撮影エッジ画像EW30との類似度Dsを求める。マッチング処理部36は、全ての画素について求めた類似度Dsを積分した積分値を、テンプレートエッジ画像ETWとワーク撮影エッジ画像EW30との全体の類似度とすることができる。
式(3)を用いる場合、画素が類似しているほど、類似度Dsの値が大きくなり、類似度Dsの積分値も大きくなる。以下、式(3)を用いて類似度Dsを求める場合を例として説明する。マッチング処理部36は、さらにエッジ勾配方向Edirectionを比較して類似度を算出してもよい。
図5Cに戻り、マッチング処理部36は、ステップS54にて、最も高い類似度を変数scoreに保存する。マッチング処理部36内のワーク位置検出部361は、ステップS55にて、ワーク撮影エッジ画像EW30に対する最も類似度が高いテンプレートエッジ画像ETWの位置を検出する。これによって、マッチング処理部36(ワーク位置検出部361)は、ローディング台30に置かれた最上位のワークWの位置を検出することができる。
但し、ステップS55では、1つの選択した角度と大きさの塗りつぶしテンプレート画像TWwに基づくテンプレートエッジ画像ETWによって、ワークWの大まかな位置が検出されているに過ぎない。ワークWの位置が正確に検出されていないこともある。
図5CにおけるステップS51〜S55は、選択した角度と大きさの塗りつぶしテンプレート画像TWwに基づくテンプレートエッジ画像ETWを用いて、ワーク撮影エッジ画像EW30の位置を探索するワーク撮影エッジ画像位置探索処理を示している。
マッチング処理部36は、ステップS61にて、最初のマッチング処理であるか否かを判定する。最初のマッチング処理であれば(YES)、即ち、塗りつぶしテンプレート画像TWwの倍率bをmin、角度iを0°としたときのテンプレートエッジ画像ETWを用いたマッチング処理であれば、マッチング処理部36は、ステップS62にて、変数scoreを最大類似度Maxscoreに設定して、処理を図5BのステップS46に戻す。
テンプレート画像拡大縮小・回転処理部33は、ステップS46にて、角度iを1°増大させ、ステップS47にて、塗りつぶしテンプレート画像TWwを360°回転させたか否かを判定する。角度iの増分は1°に限定されない。塗りつぶしテンプレート画像TWwを回転させるのは、ローディング台30上のワークWは種々の角度で配置されている可能性があるからである。
塗りつぶしテンプレート画像TWwを360°回転させていなければ(NO)、テンプレート画像拡大縮小・回転処理部33は、ステップS45にて、塗りつぶしテンプレート画像TWwを角度iだけ回転させる。ステップS46からステップS47を経てステップS45に移行した場合、塗りつぶしテンプレート画像TWwは角度iだけ回転される。
ステップS45の後、図5Cのワーク撮影エッジ画像位置探索処理では、角度iを1°とした塗りつぶしテンプレート画像TWwに基づくテンプレートエッジ画像ETWによって最も高い類似度が変数scoreに保存される。また、ワーク撮影エッジ画像位置探索処理では、ワーク撮影エッジ画像EW30に対する最も類似度が高いテンプレートエッジ画像ETWの位置が検出される。
マッチング処理部36は、ステップS61にて、最初のマッチング処理ではない(NO)と判定するので、ステップS63にて、Maxscore<scoreであるか否かを判定する。Maxscore<scoreであれば(YES)、角度iを0°としたときに得られた変数scoreよりも角度iを1°としたときに得られた変数scoreの方が大きいということである。
マッチング処理部36は、ステップS64にて、変数scoreを最大類似度Maxscoreに設定し、このときの倍率b、角度i、テンプレートエッジ画像ETWの検出位置を記憶して、処理を図5BのステップS46に戻す。
ステップS63にて、Maxscore<scoreでなければ(NO)、マッチング処理部36は、処理を図5BのステップS46に戻す。
テンプレート画像拡大縮小・回転処理部33は、ステップS46にて、再び、角度iを1°増大させ、ステップS47にて、塗りつぶしテンプレート画像TWwを360°回転させていなければ(NO)、同様に、図5CのステップS51〜S55及びS61〜S64を繰り返す。
塗りつぶしテンプレート画像TWwを360°回転させるまで図5CのステップS51〜S55及びS61〜S64を繰り返すことにより、それぞれの角度iにおける変数scoreのうち、最大類似度Maxscoreを示す角度iが求められる。
ステップS47にて塗りつぶしテンプレート画像TWwを360°回転させていれば(YES)、テンプレート画像拡大縮小・回転処理部33は、ステップS48にて、倍率bをkだけ増大させる。テンプレート画像拡大縮小・回転処理部33は、ステップS49にて、倍率bが最大倍率maxより大きくなったか否かを判定する。
倍率bが最大倍率maxより大きくなっていなければ(NO)、テンプレート画像拡大縮小・回転処理部33はステップS44及びS45を繰り返し、マッチング処理部36はステップS51〜S55及びS61〜S64を繰り返す。また、テンプレート画像拡大縮小・回転処理部33はステップS46〜S49を繰り返す。
倍率bが最大倍率maxより大きくなっていれば(YES)、最大倍率maxまでの全ての倍率bで、塗りつぶしテンプレート画像TWwを360°回転させるまでステップS51〜S55及びS61〜S64が繰り返されたということである。
このように、ワーク位置検出部361は、テンプレートエッジ画像ETWの複数の大きさ及び複数の角度のうち、大きさと角度の組を1つ選択し、ワーク撮影エッジ画像EW30に対するテンプレートエッジ画像ETWの位置をずらしながら、テンプレートエッジ画像ETWとワーク撮影エッジ画像EW30とをマッチングさせる。ワーク位置検出部361は、マッチングの結果、テンプレートエッジ画像ETWとワーク撮影エッジ画像EW30との類似度が最も高いテンプレートエッジ画像ETWの位置を予備的にワークWの位置を検出する。
ワーク位置検出部361は、大きさと角度の組を順次異ならせて、大きさと角度の複数の組それぞれで、同様にテンプレートエッジ画像ETWとワーク撮影エッジ画像EW30とをマッチングさせて、テンプレートエッジ画像ETWとワーク撮影エッジ画像EW30との類似度が最も高いテンプレートエッジ画像ETWの位置を予備的にワークWの位置を検出する。
ワーク位置検出部361は、複数の組のうち類似度が最も高い組におけるテンプレートエッジ画像ETWの位置を、最終的にローディング台30に置かれたワークWの位置であると検出する(ワーク位置検出工程)。
式(3)を用いる場合を例とすれば、ワーク位置検出部361は、全ての組のテンプレートエッジ画像ETWによって算出された類似度Dsの積分値のうち、最も大きい値の積分値が得られたテンプレートエッジ画像ETWの位置をワークWの位置と決定すればよい。
以上のようにして、ステップS64では、全ての倍率bと全ての角度iとの組み合わせのうち、最大類似度Maxscoreが得られたときの倍率b、角度i、テンプレートエッジ画像ETWの検出位置が記憶されることになる。
図5BにおけるステップS41〜S43、S48及びS49は、塗りつぶしテンプレート画像TWwを最低倍率minから最大倍率maxまでの範囲で、増分kごとに拡大または縮小する塗りつぶしテンプレート画像拡大縮小処理を示している。図5CにおけるステップS61〜S64は、最大類似度Maxscoreを示すときの倍率b、角度i、テンプレートエッジ画像ETWの検出位置を検出して記憶する最大類似度条件記憶処理を示している。
ステップS49にて倍率bが最大倍率maxより大きくなっていれば(YES)、マッチング処理部36内の表裏判定部362は、図5DのステップS71にて、表裏判定用特徴画像抽出部38がステップS34にて抽出した表裏判定用特徴画像FWの画素数が0より大きいか否かを判定する。
表裏判定用特徴画像FWの画素数が0より大きければ(YES)、表裏判定部362は、ステップS72にて、最大類似度Maxscoreとなったマッチング処理で得られた倍率b、角度i、テンプレートエッジ画像ETWの検出位置を読み出す。表裏判定部362は、ステップS73にて、表裏判定用特徴画像FWを倍率bで拡大または縮小し、角度iだけ回転させ、表裏判定用特徴画像FWをテンプレートエッジ画像ETWの検出位置へと移動させる。
表裏判定用特徴画像FWを最大類似度Maxscoreが得られたときの倍率bで拡大または縮小し、角度iだけ回転させることによって、表裏判定用特徴画像FWはワーク撮影画像W30内のワークWの大きさ及び角度に対応した大きさ及び角度となる。テンプレートエッジ画像ETWの検出位置は、ワーク撮影画像W30内のワークWの位置(ローディング台30上のワークWの位置)を示す。よって、表裏判定用特徴画像FWをテンプレートエッジ画像ETWの検出位置へと移動させれば、表裏判定用特徴画像FWはワークWの位置に対応する位置へと移動する。
表裏判定部362は、ステップS74にて、ワーク撮影エッジ画像EW30と表裏判定用特徴画像FWとの類似度を算出し、ステップS75にて、類似度が所定の閾値以上であるか否かを判定する(表裏判定工程)。ここでも、ワーク撮影エッジ画像EW30と表裏判定用特徴画像FWとが類似すればするほど類似度を示す値が高くなるとする。
類似度が閾値以上であれば(YES)、ワークWはローディング台30に表裏が正しい状態で配置されているということであり、マッチング処理部36は、処理をステップS81に移行させる。閾値未満であれば(NO)、ワークWはローディング台30に表裏が正しい状態で配置されていないということであり、マッチング処理部36(表裏判定部362)は、処理をステップS82に移行させる。
ステップS71にて表裏判定用特徴画像FWの画素数が0より大きくなければ(NO)、表裏判定部362は、ステップS76にて、表裏判定不可であると決定し、処理をステップS81に移行させる。表裏判定用特徴画像FWの画素数が0より大きくない(画素数が0である)ということは、図5AのステップS34にて、ワークWの表裏を判定するための特徴画像が抽出できなかったということである。表向きのワークWとの裏向きのワークWとで形状に差がなければ、表裏判定用特徴画像FWの画素数は0となる。
図5DにおけるステップS71〜S76は、ローディング台30に配置されているワークWが正しく表向きに配置されているか否か判定する表裏判定処理を示している。
マッチング処理部36は、ステップS81にて、ワークWの位置情報(ワーク位置情報)をロボット制御装置5に転送して処理を終了させる。マッチング処理部36(表裏判定部362)は、ステップS82にて、NC装置2に、ワークWが正しく表向きに配置されていないことを示すエラー情報を送信して処理を終了させる。
エラー情報を受信したNC装置2は、表示・操作部21にワークWが裏向きに配置されていることを表示させてもよいし、ワーク保持用ロボット20によってワークWを保持させないよう、ロボット制御装置5を制御してもよい。
図18〜図20を用いて、ステップS73〜S75の処理を具体的に説明する。図18の(a)は、ローディング台30にワークWが正しく表向きに配置されているときのワーク撮影エッジ画像EW30を示している。図18の(a)及び(b)においては、簡略化のため、最上位のワークWのワーク撮影エッジ画像EW30のみが示されている。ワーク撮影エッジ画像EW30は、ワークWの外周部のエッジEWと切り起こし部W0のエッジEW0とを含む。
ワークWは、ローディング台30の角部P0(図1参照)を原点(0,0)としたときワークWの左下角部が所定の座標(x,y)に位置して、反時計回りに30°回転しているとする。
図18(b)は、ローディング台30にワークWが誤って裏向きに配置されているときのワーク撮影エッジ画像EW30を示している。ワーク撮影エッジ画像EW30は、ワークWの外周部のエッジEWと切り起こし部W0のエッジEW0とを含む。ここでのエッジEW0は切り起こし部W0をワークWの裏面から見たときのエッジである。同様に、ワークWは左下角部が座標位置(x,y)に位置して、反時計回りに30°回転しているとする。
図18の(a)及び(b)の場合、最大類似度Maxscoreが得られたときの角度iは30°である。最大類似度Maxscoreが得られたときの倍率bは1.2であったとする。図19に示すように、表裏判定部362は、表裏判定用特徴画像FWを1.2倍し、反時計回りに30°回転させて、表裏判定用特徴画像FW’とする。表裏判定用特徴画像FWに含まれる切り起こし画像ImW0も1.2倍となり、反時計回りに30°回転して、切り起こし画像ImW0’となる。
図18の(a)に図19に示す表裏判定用特徴画像FW’を重ねると、図20の(a)のような状態となる。切り起こし部W0のエッジEW0と切り起こし画像ImW0’とは完全には重ならないこともあるが、ここでは便宜上、エッジEW0と切り起こし画像ImW0’とが完全に重なっているとする。
表裏判定部362がワーク撮影エッジ画像EW30と表裏判定用特徴画像FW’との類似度を算出すると、エッジEW0と切り起こし画像ImW0’とが重なっているため、類似度は比較的大きな値となり、所定の閾値以上となる。よって、表裏判定部362は、ワークWは表向きに配置されていると判定することができる。
図18の(b)に図19に示す表裏判定用特徴画像FW’を重ねると、図20の(b)のような状態となる。表裏判定部362がワーク撮影エッジ画像EW30と表裏判定用特徴画像FW’との類似度を算出すると、エッジEW0と切り起こし画像ImW0’とは完全にずれた位置にあるため、類似度は極めて小さい値となり、閾値未満となる。よって、表裏判定部362は、ワークWは裏向きに配置されていると判定することができる。
図4において、ロボット制御装置5内のロボット座標変換部51は、入力されたワーク位置情報を、ワーク保持用ロボット20をどのように動かすかを決めるロボット座標に変換する。ロボット座標は、ワーク保持用ロボット20の回転角、ガイドレール201上の位置、関節の角度のうちの少なくとも1つである。
ロボット制御装置5は、ロボット座標に基づいてワーク保持用ロボット20を動かし、ローディング台30上の最上位のワークWを保持させる。ワーク保持用ロボット20は、ワークWを加工機10へと搬送し、加工後のワークWを所定の位置に搬出する。
前述のように、ワーク保持用ロボット20の原点位置は撮影画像の原点と一致しているから、上記のように検出したワークWの位置はそのままワーク保持用ロボット20がワークWを保持する位置となる。
以上説明したように、本実施形態のワーク判定装置は、表裏判定用特徴画像抽出部38と、表裏判定部362とを備える。表裏判定用特徴画像抽出部38は、テンプレート画像(塗りつぶしテンプレート画像TWw)の表裏を反転させてワークの裏面を示すテンプレート裏画像ITWwを生成する。表裏判定用特徴画像抽出部38は、テンプレート画像から、テンプレート画像とテンプレート裏画像ITWwとの重なりエッジEOLを差し引くことにより、ワークWの表裏を判定するための表裏判定用特徴画像FWを抽出する。
表裏判定部362は、表裏判定用特徴画像FW(またはFW’)をワーク位置検出部361によって検出されたワークWの位置に移動させ、ワーク撮影エッジ画像EW30と表裏判定用特徴画像FWとの類似度を算出して、類似度に基づいてワークWの表裏を判定する。
従って、本実施形態のワーク判定装置によれば、ワーク撮影画像W30と表面用及び裏面用それぞれのテンプレート画像とをパターンマッチングさせる必要がないため、パターンマッチングに要する処理時間をさほど増大させることなく、効率的かつ的確にワークWの表裏を判定することができる。
本実施形態のワーク判定方法は、ワークWの表裏を判定するための表裏判定用特徴画像FWを抽出する表裏判定用特徴画像抽出工程と、ワーク撮影エッジ画像EW30と表裏判定用特徴画像FW(またはFW’)との類似度に基づいてワークWの表裏を判定する表裏判定工程とを含む。本実施形態のワーク判定方法によれば、効率的かつ的確にワークWの表裏を判定することができる。
本実施形態のワーク判定装置は、テンプレート画像を所定の大きさの範囲で複数の大きさに拡大または縮小し、複数の角度に回転させるテンプレート画像拡大縮小・回転処理部33を備える構成とすることが好ましい。本実施形態のワーク位置検出方法は、テンプレート画像拡大縮小・回転工程を含む構成とすることが好ましい。
このように構成すれば、積み重ねられているワークWの枚数によって最上位のワークWの撮影画像の大きさが変化しても、ワークWが任意の角度で配置されていても、ワークWの位置を的確に検出することができる。
本実施形態のワーク判定装置及び方法は、表裏判定用特徴画像FWを、拡大または縮小したテンプレート画像の大きさに対応するように拡大または縮小し、テンプレート画像の角度に対応するように回転させる。従って、本実施形態のワーク判定装置及び方法によれば、テンプレート画像を拡大または縮小させても、テンプレート画像を回転させても、ワーク撮影エッジ画像EW30と表裏判定用特徴画像FWとの類似度を的確に算出でき、ワークWの表裏を判定することができる。
ところで、載置場所に配置されているワークWとパターンマッチングさせるためのテンプレート画像としては、ワークWの形状を示すCADデータに基づいて作成されたワークWの外形線を線画像で示すテンプレート画像の内部を塗りつぶした塗りつぶしテンプレート画像TWwを用いるのがよい。
塗りつぶしテンプレート画像TWwを用いれば、ワークWを撮影してテンプレート画像を作成するという煩雑な作業が不要となる。ワークWを撮影する場合、一般的には、撮影専用の作業台が用いられる。塗りつぶしテンプレート画像TWwを用いれば、撮影専用の作業台が不要となり、環境が変化しても、テンプレート画像を作成し直す必要はない。塗りつぶしテンプレート画像TWwを用いれば、エッジが適切に検出されるので、ワーク撮影画像W30のエッジと塗りつぶしテンプレート画像TWwのエッジとのマッチングが的確に行われる。
本発明は以上説明した本実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々変更可能である。
1 CAM
2 NC装置
3 画像演算処理装置
4 カメラ
5 ロボット制御装置
10 加工機
20 ワーク保持用ロボット
30 ローディング台(載置場所)
31 テンプレート画像作成部
32 テンプレート画像塗りつぶし部
33 テンプレート画像拡大縮小・回転処理部
34 テンプレート画像エッジ検出部
35 ワーク撮影画像エッジ検出部
36 マッチング処理部
38 表裏判定用特徴画像抽出部
361 ワーク位置検出部
362 表裏判定部
W ワーク
2 NC装置
3 画像演算処理装置
4 カメラ
5 ロボット制御装置
10 加工機
20 ワーク保持用ロボット
30 ローディング台(載置場所)
31 テンプレート画像作成部
32 テンプレート画像塗りつぶし部
33 テンプレート画像拡大縮小・回転処理部
34 テンプレート画像エッジ検出部
35 ワーク撮影画像エッジ検出部
36 マッチング処理部
38 表裏判定用特徴画像抽出部
361 ワーク位置検出部
362 表裏判定部
W ワーク
Claims (8)
- 載置場所に配置されているワークとパターンマッチングさせるためのテンプレート画像のエッジを検出して、テンプレートエッジ画像を生成するテンプレート画像エッジ検出部と、
前記載置場所に配置されているワークを撮影したワーク撮影画像データのエッジを検出して、ワーク撮影エッジ画像を生成するワーク撮影画像エッジ検出部と、
前記テンプレートエッジ画像と前記ワーク撮影エッジ画像とをマッチングさせて、前記載置場所に配置されている前記ワークの位置を検出するワーク位置検出部と、
前記テンプレート画像の表裏を反転させて前記ワークの裏面を示すテンプレート裏画像を生成し、前記テンプレート画像から、前記テンプレート画像と前記テンプレート裏画像とが重なり合うエッジを差し引くことにより、前記ワークの表裏を判定するための表裏判定用特徴画像を抽出する表裏判定用特徴画像抽出部と、
前記表裏判定用特徴画像を前記ワーク位置検出部によって検出された前記ワークの位置に移動させ、前記ワーク撮影エッジ画像と前記表裏判定用特徴画像との類似度を算出して、類似度に基づいて前記載置場所に配置されている前記ワークの表裏を判定する表裏判定部と、
を備えることを特徴とするワーク判定装置。 - 前記テンプレート画像を所定の大きさの範囲で複数の大きさに拡大または縮小し、複数の角度に回転させるテンプレート画像拡大縮小・回転処理部をさらに備え、
前記テンプレート画像エッジ検出部は、前記テンプレート画像の複数の大きさ及び複数の角度のそれぞれで、前記テンプレート画像のエッジを検出して、複数のテンプレートエッジ画像を生成し、
前記ワーク位置検出部は、前記テンプレートエッジ画像の複数の大きさ及び複数の角度における大きさと角度の複数の組それぞれで、前記ワーク撮影エッジ画像に対する前記テンプレートエッジ画像の位置をずらしながら前記テンプレートエッジ画像と前記ワーク撮影エッジ画像とをマッチングさせたとき、前記テンプレートエッジ画像と前記ワーク撮影エッジ画像との類似度が最も高い前記テンプレートエッジ画像の位置であり、前記複数の組のうち類似度が最も高い組における前記テンプレートエッジ画像の位置を、前記載置場所に配置されている前記ワークの位置であると検出する
ことを特徴とする請求項1に記載のワーク判定装置。 - 前記表裏判定部は、前記表裏判定用特徴画像を、前記類似度が最も高い組の前記テンプレートエッジ画像の大きさに対応するように拡大または縮小し、前記類似度が最も高い組の前記テンプレートエッジ画像の角度だけ回転させ、拡大または縮小及び回転させた前記表裏判定用特徴画像を、前記類似度が最も高い組の前記テンプレートエッジ画像の位置に移動させることを特徴とする請求項2に記載のワーク判定装置。
- 前記ワークの形状を示すCADデータに基づいて、前記ワークの外形線を線画像で示すテンプレート画像を作成するテンプレート画像作成部と、
前記外形線の内部を所定の色で塗りつぶして、塗りつぶしテンプレート画像を作成するテンプレート画像塗りつぶし部と、
をさらに備え、
前記テンプレート画像エッジ検出部は、前記塗りつぶしテンプレート画像のエッジを検出して、前記塗りつぶしテンプレート画像のエッジを前記テンプレートエッジ画像として用いる
ことを特徴とする請求項1〜3のいずれか1項に記載のワーク判定装置。 - 載置場所に配置されているワークとパターンマッチングさせるためのテンプレート画像のエッジを検出して、テンプレートエッジ画像を生成するテンプレート画像エッジ検出工程と、
前記載置場所に配置されているワークを撮影したワーク撮影画像データのエッジを検出して、ワーク撮影エッジ画像を生成するワーク撮影画像エッジ検出工程と、
前記テンプレートエッジ画像と前記ワーク撮影エッジ画像とをマッチングさせて、前記載置場所に配置されている前記ワークの位置を検出するワーク位置検出工程と、
前記テンプレート画像の表裏を反転させて前記ワークの裏面を示すテンプレート裏画像を生成し、前記テンプレート画像から、前記テンプレート画像と前記テンプレート裏画像とが重なり合うエッジを差し引くことにより、前記ワークの表裏を判定するための表裏判定用特徴画像を抽出する表裏判定用特徴画像抽出工程と、
前記表裏判定用特徴画像を前記ワーク位置検出工程にて検出された前記ワークの位置に移動させ、前記ワーク撮影エッジ画像と前記表裏判定用特徴画像との類似度を算出して、類似度に基づいて前記載置場所に配置されている前記ワークの表裏を判定する表裏判定工程と、
を含むことを特徴とするワーク判定方法。 - 前記テンプレート画像を所定の大きさの範囲で複数の大きさに拡大または縮小し、複数の角度に回転させるテンプレート画像拡大縮小・回転工程をさらに含み、
前記テンプレート画像エッジ検出工程にて、前記テンプレート画像の複数の大きさ及び複数の角度のそれぞれで、前記テンプレート画像のエッジを検出して、複数のテンプレートエッジ画像を生成し、
前記ワーク位置検出工程にて、前記テンプレートエッジ画像の複数の大きさ及び複数の角度における大きさと角度の複数の組それぞれで、前記ワーク撮影エッジ画像に対する前記テンプレートエッジ画像の位置をずらしながら前記テンプレートエッジ画像と前記ワーク撮影エッジ画像とをマッチングさせたとき、前記テンプレートエッジ画像と前記ワーク撮影エッジ画像との類似度が最も高い前記テンプレートエッジ画像の位置であり、前記複数の組のうち類似度が最も高い組における前記テンプレートエッジ画像の位置を、前記載置場所に配置されている前記ワークの位置であると検出する
ことを特徴とする請求項5に記載のワーク判定方法。 - 前記表裏判定工程にて、前記表裏判定用特徴画像を、前記類似度が最も高い組の前記テンプレートエッジ画像の大きさに対応するように拡大または縮小し、前記類似度が最も高い組の前記テンプレートエッジ画像の角度だけ回転させ、拡大または縮小及び回転させた前記表裏判定用特徴画像を、前記類似度が最も高い組の前記テンプレートエッジ画像の位置に移動させることを特徴とする請求項6に記載のワーク判定方法。
- 前記ワークの形状を示すCADデータに基づいて、前記ワークの外形線を線画像で示すテンプレート画像を作成するテンプレート画像作成工程と、
前記外形線の内部を所定の色で塗りつぶして、塗りつぶしテンプレート画像を作成する塗りつぶしテンプレート画像作成工程と、
をさらに含み、
前記テンプレート画像エッジ検出工程にて、前記塗りつぶしテンプレート画像のエッジを検出して、前記塗りつぶしテンプレート画像のエッジを前記テンプレートエッジ画像として用いる
ことを特徴とする請求項5〜7のいずれか1項に記載のワーク判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016063152A JP2017182113A (ja) | 2016-03-28 | 2016-03-28 | ワーク判定装置及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016063152A JP2017182113A (ja) | 2016-03-28 | 2016-03-28 | ワーク判定装置及び方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017182113A true JP2017182113A (ja) | 2017-10-05 |
Family
ID=60004619
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016063152A Pending JP2017182113A (ja) | 2016-03-28 | 2016-03-28 | ワーク判定装置及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017182113A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019135618A (ja) * | 2018-02-05 | 2019-08-15 | キヤノン株式会社 | 情報処理装置、システム、情報処理装置の制御方法、及び、プログラム |
| CN113349568A (zh) * | 2020-02-20 | 2021-09-07 | 林秀贞 | 智能储物系统及其智能储物方法 |
| WO2023157083A1 (ja) * | 2022-02-15 | 2023-08-24 | ファナック株式会社 | ワークの位置を取得する装置、制御装置、ロボットシステム、及び方法 |
| JP2024055382A (ja) * | 2022-10-07 | 2024-04-18 | 株式会社アマダ | 画像処理装置、レーザ加工システム、ワーク認識方法及びワーク認識プログラム |
-
2016
- 2016-03-28 JP JP2016063152A patent/JP2017182113A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019135618A (ja) * | 2018-02-05 | 2019-08-15 | キヤノン株式会社 | 情報処理装置、システム、情報処理装置の制御方法、及び、プログラム |
| CN113349568A (zh) * | 2020-02-20 | 2021-09-07 | 林秀贞 | 智能储物系统及其智能储物方法 |
| CN113349568B (zh) * | 2020-02-20 | 2023-08-22 | 林秀贞 | 智能储物系统及其智能储物方法 |
| WO2023157083A1 (ja) * | 2022-02-15 | 2023-08-24 | ファナック株式会社 | ワークの位置を取得する装置、制御装置、ロボットシステム、及び方法 |
| JPWO2023157083A1 (ja) * | 2022-02-15 | 2023-08-24 | ||
| JP2024055382A (ja) * | 2022-10-07 | 2024-04-18 | 株式会社アマダ | 画像処理装置、レーザ加工システム、ワーク認識方法及びワーク認識プログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4004899B2 (ja) | 物品の位置姿勢検出装置及び物品取出し装置 | |
| US11625842B2 (en) | Image processing apparatus and image processing method | |
| US9990535B2 (en) | Pallet detection using units of physical length | |
| US11654571B2 (en) | Three-dimensional data generation device and robot control system | |
| JP5282717B2 (ja) | ロボットシステム | |
| US20150134303A1 (en) | Three-dimensional scanning system and method with hole-filling function for point cloud using contact probe | |
| KR102235999B1 (ko) | 변형 가공 지원 시스템 및 변형 가공 지원 방법 | |
| JP2017033429A (ja) | 3次元物体検査装置 | |
| JP2016159387A (ja) | 情報処理装置、処理システム、物体移動システム、および、物体移動方法 | |
| EP3229208A1 (en) | Camera pose estimation | |
| JP2017182113A (ja) | ワーク判定装置及び方法 | |
| CN111742349B (zh) | 信息处理装置、信息处理方法以及信息处理存储介质 | |
| WO2017115620A1 (ja) | 変形加工支援システムおよび変形加工支援方法 | |
| JP2021026599A (ja) | 画像処理システム | |
| JP6588270B2 (ja) | ワーク位置検出装置及びワーク位置検出方法 | |
| WO2023224350A3 (ko) | 3차원 볼륨 영상으로부터 랜드마크를 검출하기 위한 방법 및 장치 | |
| JP2013130508A (ja) | 3次元計測方法、3次元計測プログラム及びロボット装置 | |
| CN107442973B (zh) | 基于机器视觉的焊道定位方法及装置 | |
| CN110853102A (zh) | 一种新的机器人视觉标定及引导方法、装置及计算机设备 | |
| JP2017173142A (ja) | 画像処理装置、画像処理方法およびミクロジョイント切断システム | |
| JP6199000B2 (ja) | 情報処理装置 | |
| JP6198104B2 (ja) | 3次元物体認識装置及び3次元物体認識方法 | |
| JP2015160256A (ja) | ロボットシステム、処理装置及び制御方法 | |
| JP6659641B2 (ja) | 3次元モデル作成装置 | |
| JP7401250B2 (ja) | 画像処理装置、制御方法およびプログラム |