JP2017190013A - 車両制御装置及び方法 - Google Patents
車両制御装置及び方法 Download PDFInfo
- Publication number
- JP2017190013A JP2017190013A JP2016079590A JP2016079590A JP2017190013A JP 2017190013 A JP2017190013 A JP 2017190013A JP 2016079590 A JP2016079590 A JP 2016079590A JP 2016079590 A JP2016079590 A JP 2016079590A JP 2017190013 A JP2017190013 A JP 2017190013A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- force
- vehicle
- wheels
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0162—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input mainly during a motion involving steering operation, e.g. cornering, overtaking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0195—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the regulation being combined with other vehicle control systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
- B60W10/188—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes hydraulic brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/22—Conjoint control of vehicle sub-units of different type or different function including control of suspension systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
- B62D5/005—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback
- B62D5/006—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback power actuated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/008—Changing the transfer ratio between the steering wheel and the steering gear by variable supply of energy, e.g. by using a superposition gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0409—Electric motor acting on the steering column
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
- B62D6/003—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels in order to control vehicle yaw movement, i.e. around a vertical axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/04—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to forces disturbing the intended course of the vehicle, e.g. forces acting transversely to the direction of vehicle travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
- B62D7/146—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by comprising means for steering by acting on the suspension system, e.g. on the mountings of the suspension arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
- B60W2710/182—Brake pressure, e.g. of fluid or between pad and disc
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
- B60W2710/207—Steering angle of wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/22—Suspension systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/30—Wheel torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Vehicle Body Suspensions (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
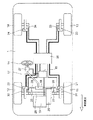
本実施形態では、ハンドルを介して車両を操縦するドライバに与えるハンドルトルク(操舵反力)を制動力によって制御する場合について説明する。
(数1)
MLateralL = −FLateralL・ξ
(数2)
MLongL = FLongL・LLong
(数3)
ML = MLateralL+MLongL
(数4)
HL = ML/RS
(数5)
MLateralR = −FLateralR・ξ
(数6)
MLongR = −FLongR・LLong
(数7)
MR = MLateralR+MLongR
(数8)
HR = MR/RS
(数9)
H = HL+HR
= ML/RS + MR/RS
= (MLateralL+MLongL+MLateralR+MLongR)/RS
= ((FLongL−FLongR)・LLong−(FLateralL+FLateralR)・ξ)/RS
(数10)
FLateralL+FLateralR =WF/g・Gy
=WF・V2・α/(l・RS・g)
(数11)
FLongL−FLongR = AH・|FLateralL+FLateralR|・PA
(数12)
FLongL−FLongR = −FLongMAX−0
(数13)
HMAX = | (−FLongMAX・LLong−(FLateralL+FLateralR)・ξ)/RS |
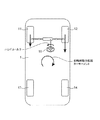
本実施形態では、ドライバに与えるハンドルトルク(操舵反力)を制動力と駆動力によって制御する場合について説明する。上記実施形態1との差異は、操舵輪(ここでは、左前輪11,右前輪12)の制動力だけでなく駆動力も左右独立して制御可能な車両におけるハンドルトルク制御という点であり、その他の構成は上記実施形態1とほぼ同じである。したがって、上記実施形態1と同じ構成には同様の符号を付してその詳細な説明を省略し、以下では、前記差異点についてのみ詳細に説明する。
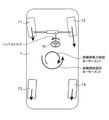
本実施形態では、ドライバによるハンドル操作を要しない自動操舵機能を有する車両において、操舵力発生装置の操舵力を制駆動力によって制御する場合について説明する。
(数14)
FLongL−FLongR = (FLateralL+FLateralR)・PF
上記実施形態1〜実施形態3では、ハンドルトルク(操舵反力)もしくは操舵力に関わる操舵輪(左前輪11,右前輪12)の制駆動力にのみ着目した。しかし、操舵輪の制駆動力に左右差をつけると、車両に対するヨーモーメントが必然的に発生する。
(数15)
WF:W−WF
(数16)
FLongL:FLongR
(数17)
FLongL:FLongR
:((W−WF)・(FLongL+FLongR)−WF・(FLongL−FLongR))/2WF
:FLongL−FLongR + ((W−WF)・(FLongL+FLongR)−WF・(FLongL−FLongR))/2WF
その他、後輪13,14の制駆動力以外の方法でヨーモーメントの過不足分(例えば旋回に要するヨーモーメントに対する過不足分であって、本実施形態の制駆動力左右配分制御を含まないGVCのみの場合のヨーモーメントに対する過不足分)を補償する方法について説明する。
以下では、操舵輪11,12の制駆動力によるハンドルトルク制御の付加機能として、車線逸脱防止装置に応用する場合について概説する。
上記実施形態1〜実施形態3では、操舵輪(左前輪11,右前輪12)の制駆動力の左右差を与えることについて説明し、上記実施形態4では、その場合でも車両の平面運動に実質的な影響を及ぼさない方法について説明した。しかし、操舵輪に対する制駆動力は、車両の平面運動だけでなく上下方向の運動にも影響を及ぼす。
11 左前輪
12 右前輪
13 左後輪
14 右後輪
15 車両運動統合制御装置(車両制御装置)
16 ハンドル
17 ステアリングコラム軸
18 ステアリングラック
19 駆動装置
20 制動制御装置
21 左前輪制動装置
22 右前輪制動装置
23 左後輪制動装置
24 右後輪制動装置
25 減速機
26 ドライブシャフト
27 電動パワーステアリング装置
28 ステアリングタイロッド
29 ステアリングナックル
30 ステアリングギヤ比可変装置
31 左前輪車輪速センサ
32 右前輪車輪速センサ
33 左後輪車輪速センサ
34 右後輪車輪速センサ
Claims (12)
- 制動力もしくは駆動力をそれぞれ制御可能な左右一対の操舵輪と、該操舵輪に対して操舵力を発生させて前記操舵輪の操舵角を制御する操舵力発生装置とを備える車両を制御する車両制御装置であって、
前記操舵輪に作用する横力に基づいて、前記制動力もしくは駆動力を前記操舵輪ごとに制御することによって、前記操舵力発生装置の操舵力または操舵反力を制御する、車両制御装置。 - 前記横力は、前記操舵輪の操舵角と前記車両の車速とに基づいて演算される、請求項1に記載の車両制御装置。
- 前記横力は、前記車両の横加速度に基づいて演算される、請求項1に記載の車両制御装置。
- 前記横力と予め決められた前記操舵力発生装置の操舵力または操舵反力の目標値とに基づいて、前記制動力もしくは駆動力を制御する、請求項1に記載の車両制御装置。
- 前記横力が大きいほど、前記左右一対の操舵輪の制動力もしくは駆動力の左右差が大きくなるように、前記制動力もしくは駆動力を制御する、請求項1に記載の車両制御装置。
- 前記車両は、前記左右一対の操舵輪とは別に設けられた他の車輪を備え、
前記操舵輪の制動力もしくは駆動力を制御することによって発生したヨーモーメントの過不足分を補償するように、前記他の車輪の制動力もしくは駆動力を制御する、請求項1に記載の車両制御装置。 - 前記車両は、前記左右一対の操舵輪とは別に設けられた他の車輪を備え、
前記操舵輪の制動力もしくは駆動力を制御することによって発生したヨーモーメントの過不足分を補償するように、前記他の車輪の操舵角を制御する、請求項1に記載の車両制御装置。 - 前記車両は、前記操舵力発生装置を構成するハンドルのハンドル角に対する前記左右一対の操舵輪の操舵角の比率であるステアリングギヤ比を可変制御可能な機構を備え、
前記操舵輪の制動力もしくは駆動力を制御することによって発生したヨーモーメントの過不足分を補償するように、前記ステアリングギヤ比を制御して前記操舵輪の操舵角を制御する、請求項1に記載の車両制御装置。 - 前記車両は、前記左右一対の操舵輪を左右独立して懸架するサスペンションを備え、
前記操舵輪の制動力もしくは駆動力を制御することによって発生したロールモーメントの変化を抑えるように、前記サスペンションを制御する、請求項1に記載の車両制御装置。 - 前記操舵輪の操舵角加速度に基づいて、前記制動力もしくは駆動力を制御する、請求項1に記載の車両制御装置。
- 前記操舵輪のスクラブ半径が負である車両の旋回過程において、前記左右一対の操舵輪の旋回外輪から旋回内輪に制動力を多く配分するように前記制動力を制御する、請求項1に記載の車両制御装置。
- 制動力もしくは駆動力をそれぞれ制御可能な左右一対の操舵輪と、該操舵輪に対して操舵力を発生させて前記操舵輪の操舵角を制御する操舵力発生装置とを備える車両を制御する車両制御方法であって、
前記操舵輪に作用する横力に基づいて、前記制動力もしくは駆動力を前記操舵輪ごとに制御することによって、前記操舵力発生装置の操舵力または操舵反力を制御する、車両制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016079590A JP6604894B2 (ja) | 2016-04-12 | 2016-04-12 | 車両制御装置及び方法 |
| PCT/JP2017/011904 WO2017179391A1 (ja) | 2016-04-12 | 2017-03-24 | 車両制御装置及び方法 |
| EP17782209.5A EP3444157B1 (en) | 2016-04-12 | 2017-03-24 | Vehicle control device and method |
| US16/086,463 US10843683B2 (en) | 2016-04-12 | 2017-03-24 | Vehicle control device and method |
| CN201780011509.8A CN109070873B (zh) | 2016-04-12 | 2017-03-24 | 车辆控制装置及方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016079590A JP6604894B2 (ja) | 2016-04-12 | 2016-04-12 | 車両制御装置及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017190013A true JP2017190013A (ja) | 2017-10-19 |
| JP6604894B2 JP6604894B2 (ja) | 2019-11-13 |
Family
ID=60041776
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016079590A Active JP6604894B2 (ja) | 2016-04-12 | 2016-04-12 | 車両制御装置及び方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10843683B2 (ja) |
| EP (1) | EP3444157B1 (ja) |
| JP (1) | JP6604894B2 (ja) |
| CN (1) | CN109070873B (ja) |
| WO (1) | WO2017179391A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019142544A1 (ja) * | 2018-01-17 | 2019-07-25 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| CN111712413A (zh) * | 2018-02-19 | 2020-09-25 | 马自达汽车株式会社 | 车辆的控制装置 |
| WO2021049259A1 (ja) * | 2019-09-13 | 2021-03-18 | 株式会社ミツバ | 制動補助装置及び電動車両 |
| KR20210065234A (ko) * | 2019-11-26 | 2021-06-04 | 현대자동차주식회사 | 자동차의 횡력 보상 제어 시스템 및 방법 |
| WO2023127444A1 (ja) * | 2021-12-27 | 2023-07-06 | 日立Astemo株式会社 | 車両制御装置、車両制御方法、及び車両制御システム |
| JP2024049111A (ja) * | 2022-09-28 | 2024-04-09 | トヨタ自動車株式会社 | 車両挙動制御方法及び車両挙動制御装置 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11400927B2 (en) * | 2018-01-29 | 2022-08-02 | Ford Global Technologies, Llc | Collision avoidance and mitigation |
| JP6940818B2 (ja) * | 2018-03-09 | 2021-09-29 | トヨタ自動車株式会社 | 車両のヨーモーメント制御装置 |
| JP7135380B2 (ja) * | 2018-03-29 | 2022-09-13 | マツダ株式会社 | 車両用制御装置 |
| WO2019195542A1 (en) * | 2018-04-04 | 2019-10-10 | Kelsey-Hayes Company | Vehicle brake system with secondary brake module |
| JP7124561B2 (ja) * | 2018-08-28 | 2022-08-24 | 株式会社デンソー | 旋回制御装置 |
| JP7172414B2 (ja) | 2018-10-12 | 2022-11-16 | トヨタ自動車株式会社 | 車両用ロール振動制振制御装置 |
| US10988170B2 (en) * | 2018-12-11 | 2021-04-27 | Continental Automotive Systems, Inc. | Driver steer recommendation upon loss of one brake circuit of a diagonal spilt layout |
| KR102808602B1 (ko) * | 2019-09-11 | 2025-05-20 | 에이치엘만도 주식회사 | 조향 제어 장치 및 그 방법, 그리고 조향 시스템 |
| CN112537368B (zh) * | 2019-09-20 | 2024-05-31 | 舍弗勒技术股份两合公司 | 用于在机电式转向系统的方向盘上产生反馈力的方向盘单元 |
| FR3101306B1 (fr) * | 2019-10-01 | 2021-10-15 | Renault Sas | Dispositif de contrôle de l’angle de braquage d’un véhicule automobile à conduite autonome |
| TWI701177B (zh) * | 2019-10-16 | 2020-08-11 | 財團法人金屬工業研究發展中心 | 後輪輔助轉向機構 |
| KR102681385B1 (ko) * | 2019-11-26 | 2024-07-03 | 현대자동차주식회사 | 인휠모터 차량의 스티어링 부하 축소를 위한 제어 방법 |
| US11472395B2 (en) | 2020-02-28 | 2022-10-18 | Cnh Industrial America Llc | System and method for executing multi-mode turns with a work vehicle |
| JP7041704B2 (ja) * | 2020-03-12 | 2022-03-24 | 本田技研工業株式会社 | 挙動制御装置及び挙動制御方法 |
| KR20220127647A (ko) * | 2021-03-11 | 2022-09-20 | 현대자동차주식회사 | 차량용 조향 보조 장치 및 그 제어방법 |
| US11052940B1 (en) | 2021-03-12 | 2021-07-06 | Canoo Technologies Inc. | Steer-by-wire systems and methods of operating thereof in vehicles |
| CN113071332B (zh) * | 2021-04-28 | 2023-03-28 | 中国第一汽车股份有限公司 | 双电机电动汽车的扭矩控制方法、电动汽车及存储介质 |
| CN113682304B (zh) * | 2021-09-27 | 2023-06-06 | 岚图汽车科技有限公司 | 一种辅助车辆转向的方法及系统 |
| CN113997929B (zh) * | 2021-11-22 | 2023-12-05 | 东风悦享科技有限公司 | 一种prt车辆的转向控制方法、系统及装置 |
| CN119421826A (zh) * | 2022-06-06 | 2025-02-11 | 沃尔沃卡车集团 | 用于控制车辆的偏航运动的方法 |
| KR20240140286A (ko) * | 2023-03-16 | 2024-09-24 | 에이치엘만도 주식회사 | 조향 시스템 고장 시 편 제동력을 이용한 목표 조향 제어 시스템 및 방법 |
| KR20240158042A (ko) * | 2023-04-26 | 2024-11-04 | 에이치엘만도 주식회사 | 차량의 조향을 제어하는 장치 및 방법 |
| CN117842171B (zh) * | 2024-03-04 | 2024-06-07 | 中铁一局集团电务工程有限公司 | 一种多种控制方式的电车转向方法 |
| DE102024202107A1 (de) * | 2024-03-06 | 2025-09-11 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren und Vorrichtung zum Betreiben eines Kraftfahrzeugs |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012063657A1 (ja) * | 2010-11-10 | 2012-05-18 | カヤバ工業株式会社 | サスペンション装置 |
| JP2013203238A (ja) * | 2012-03-28 | 2013-10-07 | Toyota Motor Corp | ステアリング装置 |
| JP2015074421A (ja) * | 2013-10-11 | 2015-04-20 | 日産自動車株式会社 | ステアリング装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3189610B2 (ja) * | 1995-02-20 | 2001-07-16 | トヨタ自動車株式会社 | 車両挙動制御装置 |
| JP3847179B2 (ja) | 2002-01-31 | 2006-11-15 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4380307B2 (ja) | 2003-11-26 | 2009-12-09 | 日産自動車株式会社 | 自動制動制御装置 |
| DE102004004870A1 (de) * | 2004-01-30 | 2005-08-18 | Gkn Driveline International Gmbh | Verfahren und Anordnung zur Steuerung einer Kraftfahrzeug-Drehmomentübertragungskupplung |
| JP4638185B2 (ja) | 2004-08-04 | 2011-02-23 | 富士重工業株式会社 | 車両の挙動制御装置 |
| JP2006187047A (ja) | 2004-12-24 | 2006-07-13 | Nissan Motor Co Ltd | 4輪独立駆動車の駆動力制御装置 |
| JP5287717B2 (ja) * | 2007-04-17 | 2013-09-11 | 日産自動車株式会社 | 車輪接地面摩擦状態推定のための装置と方法 |
| JP4924378B2 (ja) * | 2007-11-19 | 2012-04-25 | トヨタ自動車株式会社 | 車輌の走行制御装置 |
| JP2010076739A (ja) | 2008-08-25 | 2010-04-08 | Yokohama National Univ | 自動車の車両姿勢制御装置及び制御方法 |
| US8437913B2 (en) | 2008-09-12 | 2013-05-07 | Ford Global Technologies | Steering pull compensation |
| JP2010069984A (ja) | 2008-09-17 | 2010-04-02 | Fuji Heavy Ind Ltd | 運転支援装置 |
| JP4920054B2 (ja) * | 2009-03-30 | 2012-04-18 | 株式会社日立製作所 | 車両運動制御装置 |
| CN102612456B (zh) | 2010-04-14 | 2014-12-31 | 丰田自动车株式会社 | 车辆的控制装置 |
| EP2623386B1 (en) * | 2010-09-28 | 2020-09-09 | Hitachi Automotive Systems, Ltd. | Vehicle motion control device |
| JP2012121507A (ja) | 2010-12-10 | 2012-06-28 | Advics Co Ltd | 車両の操舵力制御装置 |
| JP2012136090A (ja) | 2010-12-24 | 2012-07-19 | Toyota Motor Corp | 車両制御装置 |
| JP5440630B2 (ja) * | 2011-04-25 | 2014-03-12 | 三菱自動車工業株式会社 | 車両統合制御装置 |
| JP5808977B2 (ja) * | 2011-08-19 | 2015-11-10 | Ntn株式会社 | 車両のヨーモーメント発生旋回効率化装置 |
| CN103879401A (zh) * | 2012-12-24 | 2014-06-25 | 李果 | 有力控制的汽车转向和制动系统的一致协同控制技术 |
| EP2853457B1 (en) * | 2013-09-30 | 2019-11-27 | Hitachi, Ltd. | Method and apparatus for performing driving assistance |
| EP2853458B1 (en) * | 2013-09-30 | 2019-12-18 | Hitachi, Ltd. | Method and apparatus for performing driving assistance |
| KR101988510B1 (ko) * | 2014-04-11 | 2019-09-30 | 주식회사 만도 | 차량의 전자식 안정성 제어 장치 및 방법 |
| EP3281832B1 (en) * | 2015-04-10 | 2022-09-21 | Hitachi Astemo, Ltd. | Travel control device for vehicle |
-
2016
- 2016-04-12 JP JP2016079590A patent/JP6604894B2/ja active Active
-
2017
- 2017-03-24 US US16/086,463 patent/US10843683B2/en active Active
- 2017-03-24 EP EP17782209.5A patent/EP3444157B1/en active Active
- 2017-03-24 WO PCT/JP2017/011904 patent/WO2017179391A1/ja not_active Ceased
- 2017-03-24 CN CN201780011509.8A patent/CN109070873B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012063657A1 (ja) * | 2010-11-10 | 2012-05-18 | カヤバ工業株式会社 | サスペンション装置 |
| JP2013203238A (ja) * | 2012-03-28 | 2013-10-07 | Toyota Motor Corp | ステアリング装置 |
| JP2015074421A (ja) * | 2013-10-11 | 2015-04-20 | 日産自動車株式会社 | ステアリング装置 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12084109B2 (en) | 2018-01-17 | 2024-09-10 | Hitachi Astemo, Ltd. | Vehicle control device |
| JP2019123405A (ja) * | 2018-01-17 | 2019-07-25 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| WO2019142544A1 (ja) * | 2018-01-17 | 2019-07-25 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| JP7034726B2 (ja) | 2018-01-17 | 2022-03-14 | 日立Astemo株式会社 | 車両制御装置 |
| CN111712413A (zh) * | 2018-02-19 | 2020-09-25 | 马自达汽车株式会社 | 车辆的控制装置 |
| DE112019000860B4 (de) * | 2018-02-19 | 2025-11-06 | Ikutoku Gakuen | Steuerapparat eines Fahrzeugs |
| US11667275B2 (en) | 2018-02-19 | 2023-06-06 | Mazda Motor Corporation | Control apparatus of vehicle |
| WO2021049259A1 (ja) * | 2019-09-13 | 2021-03-18 | 株式会社ミツバ | 制動補助装置及び電動車両 |
| KR20210065234A (ko) * | 2019-11-26 | 2021-06-04 | 현대자동차주식회사 | 자동차의 횡력 보상 제어 시스템 및 방법 |
| KR102895240B1 (ko) | 2019-11-26 | 2025-12-04 | 현대자동차주식회사 | 자동차의 횡력 보상 제어 시스템 및 방법 |
| JPWO2023127444A1 (ja) * | 2021-12-27 | 2023-07-06 | ||
| WO2023127444A1 (ja) * | 2021-12-27 | 2023-07-06 | 日立Astemo株式会社 | 車両制御装置、車両制御方法、及び車両制御システム |
| JP7733747B2 (ja) | 2021-12-27 | 2025-09-03 | Astemo株式会社 | 車両制御装置、車両制御方法、及び車両制御システム |
| JP2024049111A (ja) * | 2022-09-28 | 2024-04-09 | トヨタ自動車株式会社 | 車両挙動制御方法及び車両挙動制御装置 |
| JP7666470B2 (ja) | 2022-09-28 | 2025-04-22 | トヨタ自動車株式会社 | 車両挙動制御方法及び車両挙動制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3444157A4 (en) | 2019-10-23 |
| EP3444157A1 (en) | 2019-02-20 |
| JP6604894B2 (ja) | 2019-11-13 |
| EP3444157B1 (en) | 2023-10-25 |
| US20190054916A1 (en) | 2019-02-21 |
| WO2017179391A1 (ja) | 2017-10-19 |
| US10843683B2 (en) | 2020-11-24 |
| CN109070873B (zh) | 2022-03-11 |
| CN109070873A (zh) | 2018-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6604894B2 (ja) | 車両制御装置及び方法 | |
| CN109641620B (zh) | 车辆和用于车辆转向的方法 | |
| JP4715351B2 (ja) | ステアリング制御システム | |
| JP5423391B2 (ja) | 車両の速度制御装置 | |
| US10604183B2 (en) | Method for steering a vehicle, controller for a motor vehicle, and motor vehicle | |
| JP7661055B2 (ja) | カーブに沿って走行する間に可変剛性および後操向車輪を伴う路上走行車両を制御する方法 | |
| CN114502448A (zh) | 用于车辆转向的方法和系统布置以及具有这种系统的车辆 | |
| JP4333660B2 (ja) | ロール角制御とロール剛性前後配分比制御を組み合わせた車輌 | |
| CN104487268A (zh) | 车辆用悬架装置、使用该装置的汽车以及转向控制方法 | |
| JP7684793B2 (ja) | 車両制御装置 | |
| JP2008055921A (ja) | 車両の後輪トー角可変制御装置 | |
| US20190047348A1 (en) | Method and adjustment system for keeping a vehicle on course during roll movements of a vehicle body | |
| CN102958784B (zh) | 用于机电式调节转向角的方法以及具有机电式转向装置的机动车 | |
| EP3059141B1 (en) | Active steering system for articulated bus | |
| JPH0344027B2 (ja) | ||
| JP5347499B2 (ja) | 車両制御装置及び車両制御方法 | |
| JP5157306B2 (ja) | 車輪位置可変車両 | |
| JP2010158963A (ja) | 車両制御装置及び車両制御方法 | |
| JP5082656B2 (ja) | 車両の旋回挙動制御方法および装置 | |
| JP2010202052A (ja) | 車両の車輪位置変更装置 | |
| JP6139212B2 (ja) | サスペンション装置 | |
| JPS63188512A (ja) | 車両用姿勢制御装置 | |
| CN118358312A (zh) | 一种悬架操稳性能实时调控装置和调控方法 | |
| JP5476909B2 (ja) | 操舵装置 | |
| JP2009107459A (ja) | タイヤ位置可変車両およびタイヤ力変化抑制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190813 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191015 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6604894 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |