JP2017192161A - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP2017192161A JP2017192161A JP2016078594A JP2016078594A JP2017192161A JP 2017192161 A JP2017192161 A JP 2017192161A JP 2016078594 A JP2016078594 A JP 2016078594A JP 2016078594 A JP2016078594 A JP 2016078594A JP 2017192161 A JP2017192161 A JP 2017192161A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- power
- torque
- vehicle
- determined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/15—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with additional electric power supply
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/184—Preventing damage resulting from overload or excessive wear of the driveline
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/42—Electrical machine applications with use of more than one motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/425—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/64—Road conditions
- B60L2240/647—Surface situation of road, e.g. type of paving
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/26—Transition between different drive modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/30—Wheel torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Structure Of Transmissions (AREA)
Abstract
Description
Claims (10)
- 第1モータと、
前記第1モータが連結された第1回転要素と、駆動輪にトルク伝達可能に連結された第2回転要素と、回転軸が連結された第3回転要素との少なくとも三つの回転要素を有する差動機構と、
前記差動機構から前記駆動輪にトルクを伝達する経路内に駆動力を伝達することができるように連結された第2モータと、
前記回転軸の回転を選択的に停止させるロック機構と
を備えた車両の制御装置において、
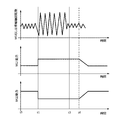
前記ロック機構は、前記回転軸のトルクが予め定められた所定トルク未満の場合に前記回転軸の回転を停止させた状態を維持し、かつ前記回転軸のトルクが前記所定トルク以上の場合に前記回転軸の回転を可能にするように構成され、
前記第1モータと前記第2モータとの動力を制御するコントローラを備え、
前記コントローラは、
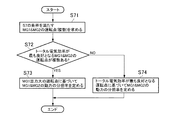
前記ロック機構により前記回転軸の回転を停止させた状態で前記第1モータと前記第2モータとの駆動力で走行する際に、走行している走行路または走行する予定の走行路に基づいて前記駆動輪から入力されるトルクを推定し、
前記推定されたトルクが前記所定トルク以上の場合には、前記推定されたトルクが前記所定トルク未満の場合と比較して、前記第1モータの動力が大きくなる前記第1モータの動力を定め、かつ前記第2モータの動力が小さくなる第2モータの動力を定め、
前記定められた前記第1モータの動力に前記第1モータを制御し、かつ前記定められた前記第2モータの動力に前記第2モータを制御する
ように構成されていることを特徴とする車両の制御装置。 - 請求項1に記載の車両の制御装置において、
前記コントローラは、
前記車両に要求される動力を充足する範囲で、前記第1モータの動力と前記第2モータの動力とを定めるように構成されている
ことを特徴とする車両の制御装置。 - 請求項2に記載の車両の制御装置において、
前記第1モータの動力を増大させかつ前記第2モータの動力を減少させた後の動力の合算値が前記車両に要求される動力を充足する前記第1モータの運転点と前記第2モータの運転点とが複数ある場合には、前記複数の運転点毎に前記第1モータにおける電気効率と前記第2モータにおける電気効率とのトータルの電気効率を求め、
前記求められたトータルの電気効率のうち電気効率が良好となるトータルの電気効率に基づいて前記第1モータと前記第2モータとのそれぞれの運転点を定め、
前記定められた前記第1モータの運転点に基づいて前記第1モータを制御し、かつ前記定められた前記第2モータの運転点に基づいて前記第2モータを制御する
ように構成されていることを特徴とする車両の制御装置。 - 請求項3に記載の車両の制御装置において、
前記トータルの電気効率となる前記第1モータと前記第2モータとの運転点が複数ある場合には、前記トータルの電気効率が良好となる第1モータの複数の運転点のうち、前記第1モータの動力が大きい運転点を定め、
前記定められた前記第1モータの運転点に応じて前記第2モータの運転点を定め、
前記定められた前記第1モータの運転点に基づいて前記第1モータを制御し、かつ前記定められた前記第2モータの運転点に基づいて前記第2モータを制御する
ように構成されていることを特徴とする車両の制御装置。 - 請求項1または2に記載の車両の制御装置において、
前記コントローラは、
前記推定されたトルクが前記所定トルク以上の場合における前記第1モータと前記第2モータとのいずれか一方のモータの動力の変動量を求め、
前記車両に要求される動力と前記一方のモータの動力の変動量とから前記第1モータと前記第2モータとの他方のモータの動力の変動量を求め、
前記求められた前記他方のモータの動力の変動量に基づいて前記他方のモータの動力を定める
ように構成されていることを特徴とする車両の制御装置。 - 請求項1または2に記載の車両の制御装置において、
前記コントローラは、
前記推定されたトルクが前記所定トルク以上の場合における前記第1モータと前記第2モータとのいずれか一方のモータの動力を求め、
前記車両に要求される動力と前記一方のモータの動力とから前記第2モータの動力を定める
ように構成されていることを特徴とする車両の制御装置。 - 請求項1ないし6のいずれか一項に記載の車両の制御装置において、
前記第1モータおよび前記第2モータ以外の他の主駆動力源を備え、
前記回転軸は、前記主駆動力源に連結され、
前記コントローラは、前記車両の運転状態に応じて前記ロック機構を制御するように構成され、
前記コントローラは、
前記主駆動力源から前記駆動輪にトルクを伝達して走行する場合に前記回転軸の回転を可能にし、前記第1モータを駆動力源として機能させるとともに、前記主駆動力源を停止させて走行する場合に前記回転軸の回転を停止させるように前記ロック機構を制御する
ように構成されていることを特徴とする車両の制御装置。 - 請求項1ないし7のいずれか一項に記載の車両の制御装置において、
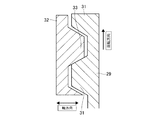
前記ロック機構は、前記回転軸と相対回転可能に設けられた回転体と、固定部と、前記回転体と前記固定部とを係合する第1係合部と、前記回転体と前記回転軸とを係合する第2係合部とを有し、前記第1係合部および前記第2係合部を係合させることにより前記回転軸の回転を停止させるように構成され、前記所定トルク以上のトルクが前記回転軸に作用した場合に前記第1係合部が解放されるように構成されている
ことを特徴とする車両の制御装置。 - 請求項8に記載の車両の制御装置において、
前記回転体と前記固定部とが互いに対向して配置され、
前記第1係合部は、前記固定部側に突出した第1ドグ歯を含み、
前記第2係合部は、前記回転体側に突出した第2ドグ歯を含み、
前記第1ドグ歯は、前記第2ドグ歯側に向けて次第に歯厚が薄くなるように形成され、
前記第2ドグ歯は、前記第1ドグ歯側に向けて次第に歯厚が薄くなるように形成されている
ことを特徴とする車両の制御装置。 - 請求項1ないし9のいずれか一項に記載の車両の制御装置において、
前記第2モータの出力軸にギヤが連結され、
前記ギヤの少なくとも一部が、冷却用または潤滑用のオイルに浸漬するように構成されている
ことを特徴とする車両の制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016078594A JP6540580B2 (ja) | 2016-04-11 | 2016-04-11 | 車両の制御装置 |
| US15/480,809 US10308136B2 (en) | 2016-04-11 | 2017-04-06 | Vehicle control system |
| CN201710230432.5A CN107284437B (zh) | 2016-04-11 | 2017-04-11 | 车辆的控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016078594A JP6540580B2 (ja) | 2016-04-11 | 2016-04-11 | 車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017192161A true JP2017192161A (ja) | 2017-10-19 |
| JP6540580B2 JP6540580B2 (ja) | 2019-07-10 |
Family
ID=59999280
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016078594A Expired - Fee Related JP6540580B2 (ja) | 2016-04-11 | 2016-04-11 | 車両の制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10308136B2 (ja) |
| JP (1) | JP6540580B2 (ja) |
| CN (1) | CN107284437B (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111824154B (zh) * | 2019-04-15 | 2022-05-13 | 比亚迪股份有限公司 | 车辆的控制方法、装置和车辆 |
| JP7188368B2 (ja) * | 2019-12-03 | 2022-12-13 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013088501A1 (ja) * | 2011-12-12 | 2013-06-20 | トヨタ自動車株式会社 | ハイブリッド車両の駆動制御装置 |
| JP2013147124A (ja) * | 2012-01-18 | 2013-08-01 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2013169852A (ja) * | 2012-02-20 | 2013-09-02 | Toyota Motor Corp | 車両の制御装置 |
| JP2015101278A (ja) * | 2013-11-27 | 2015-06-04 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置 |
| JP2015116861A (ja) * | 2013-12-17 | 2015-06-25 | トヨタ自動車株式会社 | ハイブリッド車の動力伝達装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002012160A (ja) * | 2000-06-29 | 2002-01-15 | Fuji Heavy Ind Ltd | 車両の路面摩擦係数推定装置 |
| JP4213545B2 (ja) * | 2003-09-05 | 2009-01-21 | 株式会社ジェイテクト | 車輪のグリップ度推定装置、及び該装置を備えた車両の運動制御装置 |
| DE102005030603B8 (de) * | 2004-07-01 | 2015-02-19 | Toyota Jidosha Kabushiki Kaisha | Steuervorrichtung für ein Fahrzeugantriebssystem |
| JP5206876B2 (ja) * | 2009-07-08 | 2013-06-12 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP5948940B2 (ja) * | 2012-02-20 | 2016-07-06 | 株式会社ジェイテクト | 車両用操舵装置 |
| US9108621B2 (en) * | 2012-05-07 | 2015-08-18 | Ford Global Technologies, Llc | Controlling powertrain components for hill-holding in a hybrid electric vehicle |
| JP6183333B2 (ja) * | 2014-11-07 | 2017-08-23 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6361527B2 (ja) * | 2015-03-02 | 2018-07-25 | トヨタ自動車株式会社 | 変速機の制御装置 |
| JP6274143B2 (ja) * | 2015-03-31 | 2018-02-07 | トヨタ自動車株式会社 | セレクタブルワンウェイクラッチ |
-
2016
- 2016-04-11 JP JP2016078594A patent/JP6540580B2/ja not_active Expired - Fee Related
-
2017
- 2017-04-06 US US15/480,809 patent/US10308136B2/en not_active Expired - Fee Related
- 2017-04-11 CN CN201710230432.5A patent/CN107284437B/zh not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013088501A1 (ja) * | 2011-12-12 | 2013-06-20 | トヨタ自動車株式会社 | ハイブリッド車両の駆動制御装置 |
| JP2013147124A (ja) * | 2012-01-18 | 2013-08-01 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2013169852A (ja) * | 2012-02-20 | 2013-09-02 | Toyota Motor Corp | 車両の制御装置 |
| JP2015101278A (ja) * | 2013-11-27 | 2015-06-04 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置 |
| JP2015116861A (ja) * | 2013-12-17 | 2015-06-25 | トヨタ自動車株式会社 | ハイブリッド車の動力伝達装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6540580B2 (ja) | 2019-07-10 |
| CN107284437B (zh) | 2019-10-15 |
| US10308136B2 (en) | 2019-06-04 |
| US20170291504A1 (en) | 2017-10-12 |
| CN107284437A (zh) | 2017-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10343509B2 (en) | Device for controlling driving force of hybrid vehicle | |
| JP5915744B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6304173B2 (ja) | 車両 | |
| US9963148B2 (en) | Control device and control method for vehicle | |
| US9944279B2 (en) | Control system for hybrid vehicle | |
| US9393953B2 (en) | Transmission for vehicle and control device | |
| JP5708826B2 (ja) | 車両の制御システム | |
| JP6307974B2 (ja) | 車両用動力伝達機構の制御装置 | |
| US20190126736A1 (en) | Control system for hybrid vehicles | |
| US11787392B2 (en) | Control system for hybrid vehicle | |
| JP5907155B2 (ja) | ハイブリッド駆動装置の制御装置 | |
| US20160257300A1 (en) | Vehicle control system | |
| US11247657B2 (en) | Control system for hybrid vehicles | |
| US10293828B2 (en) | Engine starting system | |
| JP2014133529A (ja) | ハイブリッド車両の動力伝達装置及びハイブリッドシステム | |
| JP7172894B2 (ja) | 車両の制御装置 | |
| JP2011005957A (ja) | 車両のエンジン始動制御装置 | |
| JP6540580B2 (ja) | 車両の制御装置 | |
| JP2018016255A (ja) | ハイブリッド車の制御装置 | |
| JP6149839B2 (ja) | 車両 | |
| JP2005155843A (ja) | ハイブリッド車両の駆動装置 | |
| US20210172517A1 (en) | Control system for power transmission unit | |
| JP5659959B2 (ja) | ハイブリッド車の制御装置 | |
| JP2020056485A (ja) | 車両の制御装置 | |
| JP2019162979A (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180815 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190527 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6540580 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |