JP2017195891A - 甲殻類の体格を判断するためのイメージング - Google Patents
甲殻類の体格を判断するためのイメージング Download PDFInfo
- Publication number
- JP2017195891A JP2017195891A JP2017111386A JP2017111386A JP2017195891A JP 2017195891 A JP2017195891 A JP 2017195891A JP 2017111386 A JP2017111386 A JP 2017111386A JP 2017111386 A JP2017111386 A JP 2017111386A JP 2017195891 A JP2017195891 A JP 2017195891A
- Authority
- JP
- Japan
- Prior art keywords
- image
- crustacean
- living
- camera
- shell
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K61/00—Culture of aquatic animals
- A01K61/90—Sorting, grading, counting or marking live aquatic animals, e.g. sex determination
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K69/00—Stationary catching devices
- A01K69/06—Traps
- A01K69/08—Rigid traps, e.g. lobster pots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0075—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence by spectroscopy, i.e. measuring spectra, e.g. Raman spectroscopy, infrared absorption spectroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0077—Devices for viewing the surface of the body, e.g. camera, magnifying lens
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/956—Inspecting patterns on the surface of objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2503/00—Evaluating a particular growth phase or type of persons or animals
- A61B2503/40—Animals
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10048—Infrared image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10141—Special mode during image acquisition
- G06T2207/10152—Varying illumination
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30128—Food products
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Environmental Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- General Physics & Mathematics (AREA)
- Surgery (AREA)
- Public Health (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Theoretical Computer Science (AREA)
- Biodiversity & Conservation Biology (AREA)
- Animal Husbandry (AREA)
- Zoology (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Immunology (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- Marine Sciences & Fisheries (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Farming Of Fish And Shellfish (AREA)
Abstract
Description
・ロブスターおよび/またはエビの甲羅の長さ、測定結果はロブスターまたはエビのサイズを決定するためにしばしば使用され、合法的な最小サイズのロブスターに対する収穫規則内で使用される(漁業地区に応じて、ロブスターについて、例えば80−85mmの甲羅の長さ)。
・ひびが入ったか、または、損傷した外骨格のような殻の欠陥、それは、甲殻類の殻上にある、損傷およびひびのある外骨格を覆ってしまう、“忙しい”パターンのために可視光線スペクトルの範囲では識別することが困難である。
・失ったかまたは折れた足、
・性別、より広い幅の尾を有する雄と比べ、雌のロブスターでは甲羅の長さに対する尾の幅が小さいことに基づく、
・さまざまなはさみ、ボディおよび/または尾測定値などの殻形態、この測定により、潜在的に動物をこのユニークな殻骨格が発見された特定の収穫領域と関連づけることができる。
Claims (94)
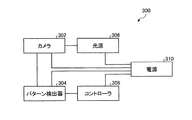
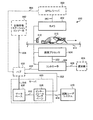
- 生きた甲殻類の殻の画像を撮像するカメラと、
前記カメラと動作的に接続され、前記生きた甲殻類の脱皮ステージを示すパターンを、前記撮像された画像から検出するパターン検出器と、
を備えることを特徴とする装置。 - 前記画像は、前記生きた甲殻類の可視光線スペクトル画像を含む、ことを特徴とする請求項1に記載の装置。
- 前記画像は、前記生きた甲殻類の赤外線スペクトル画像を含む、ことを特徴とする請求項1に記載の装置。
- 前記画像は、前記生きた甲殻類の紫外線スペクトル画像を含む、ことを特徴とする請求項1に記載の装置。
- 前記パターン検出器は、前記カメラによって撮像された前記生きた甲殻類の他の画像から、前記生きた甲殻類の脱皮ステージを示すパターンの特徴を検出するよう動作可能である、ことを特徴とする請求項1から4のいずれか一項に記載の装置。
- 前記他の画像のパターンは、前記画像のパターンと異なる、ことを特徴とする請求項5に記載の装置。
- 前記カメラは、赤外線フィルタを除去するように修正されている、ことを特徴とする請求項3に記載の装置。
- 前記カメラは、可視光線フィルタを有するようにさらに修正されている、ことを特徴とする請求項7に記載の装置。
- 前記パターン検出器は、ビジョン検出ソフトウエアを実行する処理装置を含む、ことを特徴とする請求項1から8のいずれか一項に記載の装置。
- 前記生きた甲殻類を照射するための光源をさらに備えることを特徴とする請求項1から9のいずれか一項に記載の装置。
- 前記光源は、可視光線、赤外線、および、紫外線スペクトル成分の一つ以上を与える、ことを特徴とする請求項10に記載の装置。
- 前記光源は、前記カメラと動作的に接続されており、
前記カメラは、前記生きた甲殻類を照射するように前記光源を制御する、ことを特徴とする請求項10または11に記載の装置。 - 前記画像を撮像するとき、前記カメラは、前記生きた甲殻類を照射するよう前記光源を制御する、ことを特徴とする請求項12に記載の装置。
- 前記カメラは、ある動作条件の下でのみ、前記生きた甲殻類を照射するよう前記光源を
制御する、ことを特徴とする請求項12に記載の装置。 - 前記光源は、カメラのフラッシュを含む、ことを特徴とする請求項12から14のいずれか一項に記載の装置。
- 前記カメラおよび前記パターン検出器に電力を供給するべく動作的に接続された電源をさらに備えることを特徴とする請求項1から15のいずれか一項に記載の装置。
- 前記パターン検出器に動作的に接続され、前記検出に基づいて前記生きた甲殻類の続くハンドリングを制御するコントローラをさらに備えることを特徴とする請求項1から16のいずれか一項に記載の装置。
- 前記続くハンドリングは、
前記生きた甲殻類を格付けすること、
低品質の甲殻類を取捨選択すること、
前記生きた甲殻類のトラップへの進入を許すか、または、ブロックすることの一つ以上を含むことを特徴とする請求項17に記載の装置。 - 前記生きた甲殻類の脱皮ステージまたは品質を判断するためのコンベアサイズ格付けシステム、
前記生きた甲殻類が前記カメラの下に配置され、その品質または脱皮ステージに関する応答が前記パターン検出器によって与えられるところの船またはプラント環境、
輸送用に箱を梱包している間に、低品質な甲殻類を取捨選択するべく、前記生きた甲殻類がモニター上で梱包者によって見ることができるところの梱包エリア、
前記カメラが携帯電話機の内蔵カメラを含み、品質または脱皮ステージを検出する携帯電話機、
携帯デバイス、
前記パターン検出器による判断に基づいて、低品質の生きた甲殻類に進入させないトラップ、の一つ以上に実装されることを特徴とする請求項1から17のいずれか一項に記載の装置。 - 前記パターン検出器は、前記カメラにより撮像された撮像画像を含む、複数の画像を受け取り、前記複数の画像に基づいて、前記生きた甲殻類の脱皮ステージを示すパターンの特徴を検出するよう動作可能であることを特徴とする請求項1から4のいずれか一項に記載の装置。
- 前記複数の画像は、異なるタイプの画像を含む、ことを特徴とする請求項20に記載の装置。
- 前記カメラに、前記異なるタイプの画像を撮像することを可能とする、複数の光学フィルタを含む切替可能フィルタをさらに備えることを特徴とする請求項21に記載の装置。
- 前記複数の光学フィルタは、前記カメラと前記生きた甲殻類との間の画像光学経路に出入りするよう移動可能であることを特徴とする請求項22に記載の装置。
- 前記複数の光学フィルタは、前記光源と前記生きた甲殻類との間の照射光経路に出入りするよう移動可能であることを特徴とする請求項22に記載の装置。
- 前記特徴は、
前記殻の前記撮像された画像内での所定のパターンの有無、
前記殻の前記撮像された画像内での前記所定のパターンの明るさ、および
前記殻の前記撮像された画像内での前記殻のパターン全体の明るさ、の一つ以上を含むことを特徴とする請求項1から24のいずれか一項に記載の装置。 - 撮像された前記画像と関連づけられる位置情報を与えるグローバル・ポジショニング・システム(GPS)レシーバをさらに備えることを特徴とする請求項1から25のいずれか一項に記載の装置。
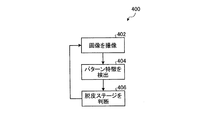
- 生きた甲殻類の殻の画像を撮像する段階と、
前記生きた甲殻類の脱皮ステージを示すパターンの特徴を前記撮像画像から検出する段階と、
を備える方法。 - 前記撮像する段階は、前記生きた甲殻類の可視光線画像を撮像する段階を含むことを特徴とする請求項27に記載の方法。
- 前記撮像する段階は、前記生きた甲殻類の赤外線スペクトル画像を撮像する段階を含むことを特徴とする請求項27に記載の方法。
- 前記撮像する段階は、前記生きた甲殻類の紫外線スペクトル画像を撮像する段階を含むことを特徴とする請求項27に記載の方法。
- 前記生きた甲殻類の他の画像を撮像する段階と、
前記生きた甲殻類の脱皮ステージを示すパターンの特徴を前記他の画像から検出する段階と、をさらに備えることを特徴とする請求項27から30のいずれか一項に記載の方法。 - 前記他の画像用の前記パターンは、前記画像用の前記パターンと異なることを特徴とする請求項31に記載の方法。
- 前記撮像する段階は、赤外線フィルタを除去するように修正されたカメラによって赤外線画像を撮像する段階を含むことを特徴とする請求項29に記載の方法。
- 前記撮像する段階は、赤外線フィルタを除去し、かつ、可視光線フィルタを含むように修正されたカメラによって、赤外線画像を撮像する段階を含むことを特徴とする請求項29に記載の方法。
- 前記検出する段階は、前記パターンの前記特徴を検出するべく、ビジョン検出ソフトウエアをトレーニングする段階を含むことを特徴とする請求項27から34のいずれか一項に記載の方法。
- 前記生きた甲殻類を照射する段階をさらに備えることを特徴とする請求項27から35のいずれか一項に記載の方法。
- 前記照射する段階は、可視光線、赤外線、および、紫外線スペクトル成分の一つ以上によって前記生きた甲殻類を照射する段階を含むことを特徴とする請求項36に記載の方法。
- 前記検出する段階に基づいて、前記生きた甲殻類の続くハンドリングを制御する段階をさらに備える請求項27から37のいずれか一項に記載の方法。
- 前記続くハンドリングは、
前記生きた甲殻類を格付けすること、
低品質の甲殻類を取捨選択すること、
前記生きた甲殻類のトラップへのエントリを許すか、または、ブロックすることの一つ以上を含むことを特徴とする請求項38に記載の方法。 - 前記撮像する段階は、前記撮像された画像を含む複数の画像を撮像する段階を含み、
前記検出する段階は、前記複数の画像に基づいて、前記生きた甲殻類の脱皮ステージを示すパターンの特徴を検出する段階を含む、
ことを特徴とする請求項27から30のいずれか一項に記載の方法。 - 前記複数の画像は、異なるタイプの画像を含むことを特徴とする請求項40に記載の方法。
- 前記異なるタイプの画像の撮像を可能にするべく、光学経路へ複数の光学フィルタを出し入れするよう移動する段階をさらに備えることを特徴とする請求項41に記載の方法。
- 前記光学経路は、前記カメラと前記生きた甲殻類との間の画像光学経路を含むことを特徴とする請求項42に記載の方法。
- 前記光学経路は、光源と前記生きた甲殻類との間の照射光経路を含むことを特徴とする請求項42に記載の方法。
- 前記特徴は、
前記殻の前記撮像された画像内での所定のパターンの有無、
前記殻の前記撮像された画像内での前記所定のパターンの明るさ、および
前記殻の前記撮像された画像内での前記殻のパターン全体の明るさ、の一つ以上を含むことを特徴とする請求項27から43のいずれか一項に記載の方法。 - 位置情報を収集する段階と、
前記撮像された画像に、前記位置情報を関連づける段階と、
をさらに備えることを特徴とする請求項27から45のいずれか一項に記載の方法。 - 請求項1から26のいずれか一項に記載の装置を備える、生きた甲殻類の画像を撮像し、前記生きた甲殻類の脱皮ステージを示すパターンの特徴を前記撮像された画像から検出する、マシンビジョンシステム。
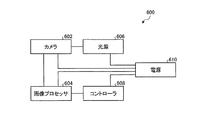
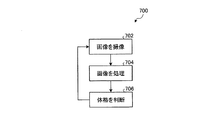
- 生きた甲殻類の殻の画像を撮像するカメラと、
前記カメラに動作的に接続され、前記生きた甲殻類の殻の体格を判断するべく前記撮像された殻の画像を処理する画像プロセッサと、
を備えることを特徴とする装置。 - 前記体格は、
甲羅の長さ、
殻の欠陥、
失ったか、折れた脚、
尾の幅、
殻形態計測、の一つ以上を含むことを特徴とする請求項48に記載の装置。 - 前記画像は、前記生きた甲殻類の可視光線スペクトル画像を含むことを特徴とする請求項48または49に記載の装置。
- 前記画像は、前記生きた甲殻類の赤外線スペクトル画像を含むことを特徴とする請求項48または49に記載の装置。
- 前記画像は、前記生きた甲殻類の紫外線スペクトル画像を含むことを特徴とする請求項48または49に記載の装置。
- 前記画像プロセッサはさらに、前記カメラによって撮像された前記生きた甲殻類の他の画像から前記生きた甲殻類の前記殻の体格を判断するよう動作可能である請求項48または49に記載の装置。
- 前記他の画像から判断された前記体格は、前記画像から判断された前記体格と異なることを特徴とする請求項53に記載の装置。
- 前記カメラは、赤外線フィルタを除去するように修正されたカメラを含むことを特徴とする請求項51に記載の装置。
- 前記カメラは可視光線フィルタを含むようにさらに修正されていることを特徴とする請求項55に記載の装置。
- 前記画像プロセッサは、ビジョン検出ソフトウエアを実行する処理デバイスを含むことを特徴とする請求項48から56のいずれか一項に記載の装置。
- 前記生きた甲殻類を照射する光源をさらに備えることを特徴とする請求項48から57のいずれか一項に記載の装置。
- 前記光源は、可視光線、赤外線、および、紫外線スペクトル成分の一つ以上を与える、ことを特徴とする請求項58に記載の装置。
- 前記光源は、前記カメラと動作的に接続されており、
前記カメラは、前記生きた甲殻類を照射するよう前記光源を制御する、
ことを特徴とする請求項59に記載の装置。 - 前記カメラは、前記画像が撮像されるとき、前記生きた甲殻類を照射するよう前記光源を制御することを特徴とする請求項60に記載の装置。
- 前記カメラは、ある動作条件の下でのみ前記生きた甲殻類を照射するよう前記光源を制御することを特徴とする請求項60に記載の装置。
- 前記光源は、前記カメラのフラッシュを含む請求項60から62のいずれか一項に記載の装置。
- 前記カメラおよび前記画像プロセッサに電力を供給するべく動作的に接続された電源をさらに備える請求項48から63のいずれか一項に記載の装置。
- 前記画像プロセッサに動作的に接続され、前記判断された体格に基づいて前記生きた甲殻類の続くハンドリングを制御するコントローラをさらに備える請求項48から64のいずれか一項に記載の装置。
- 前記続くハンドリングは、
前記生きた甲殻類を格付けすること、
低品質の甲殻類を取捨選択すること、
前記生きた甲殻類のトラップへのエントリを許すか、または、ブロックすることの一つ以上を含む、ことを特徴とする請求項65に記載の装置。 - コンベアサイズ格付けシステム、
前記生きた甲殻類が前記カメラの下に配置され、その品質または脱皮ステージに関する応答が前記パターン検出器によって与えられるところの船またはプラント環境、
輸送用に箱を梱包している間に、低品質な甲殻類を取捨選択するべく、前記生きた甲殻類がモニター上で梱包者によって見ることができるところの梱包エリア、
前記カメラが携帯電話機の内蔵カメラを含む、携帯電話機、
携帯デバイス、
前記パターン検出器による判断に基づいて、低品質の生きた甲殻類に対して、エントリをさせないトラップ、
の一つ以上に実装されることを特徴とする請求項48から65のいずれか一項に記載の装置。 - 前記画像プロセッサは、前記カメラにより撮像された撮像画像を含む、複数の画像を受け取り、前記複数の画像にも基づいて前記生きた甲殻類の前記殻の体格を判断するよう動作可能であることを特徴とする請求項48から52のいずれか一項に記載の装置。
- 前記複数の画像は、異なるタイプの画像を含むことを特徴とする請求項68に記載の装置。
- 前記カメラに、前記異なるタイプの画像を撮像することを可能とする、複数の光学フィルタを含む切替可能フィルタをさらに備えることを特徴とする請求項69に記載の装置。
- 前記複数の光学フィルタは、前記カメラと前記生きた甲殻類との間の画像光学経路に出入りするように移動可能であることを特徴とする請求項70に記載の装置。
- 前記複数の光学フィルタは、前記光源と、前記生きた甲殻類との間の照射光経路に出入
りするように移動可能であることを特徴とする請求項70に記載の装置。 - 撮像された前記画像と関連づけられる位置情報を与えるグローバル・ポジショニング・システム(GPS)レシーバをさらに備えることを特徴とする請求項48から72のいずれか一項に記載の装置。
- 生きた甲殻類の殻の画像を撮像する段階と、
前記生きた甲殻類の殻の体格を判断するべく前記撮像された殻の画像を処理する段階と、
を備えることを特徴とする方法。 - 前記体格は、
甲羅の長さ、
殻の欠陥、
失ったか、折れた脚、
尾の幅、
殻形態計測、の一つ以上を含むことを特徴とする請求項74に記載の方法。 - 前記撮像する段階は、前記生きた甲殻類の可視光線スペクトル画像を撮像する段階を含むことを特徴とする請求項74または75に記載の方法。
- 前記撮像する段階は、前記生きた甲殻類の赤外線スペクトル画像を撮像する段階を含むことを特徴とする請求項74または75に記載の方法。
- 前記撮像する段階は、前記生きた甲殻類の紫外線スペクトル画像を撮像する段階を含むことを特徴とする請求項74または75に記載の方法。
- 前記生きた甲殻類の他の画像を撮像する段階と、
前記カメラによって撮像された前記生きた甲殻類の他の画像から前記生きた甲殻類の前記殻の体格を判断する段階と、
をさらに備えることを特徴とする請求項74または75に記載の方法。 - 前記他の画像から判断された前記体格は、前記画像から判断された前記体格と異なることを特徴とする請求項79に記載の方法。
- 前記撮像する段階は、赤外線フィルタを除去するように修正されたカメラによって前記赤外線画像を撮像する段階を含むことを特徴とする請求項77に記載の方法。
- 前記撮像する段階は、赤外線フィルタを除去し、かつ、可視光線フィルタを含むように修正されたカメラによって、前記赤外線画像を撮像する段階を含むことを特徴とする請求項77に記載の方法。
- 前記処理する段階は、前記体格を示す前記撮像された画像内の特徴を検出するべくビジョン検出ソフトウエアをトレーニングする段階を含むことを特徴とする請求項74から82のいずれか一項に記載の方法。
- 前記生きた甲殻類を照射する段階をさらに備えることを特徴とする請求項74から83
のいずれか一項に記載の方法。 - 前記照射する段階は、可視光線、赤外線、および、紫外線スペクトル成分の一つ以上によって、前記生きた甲殻類を照射する段階を含むことを特徴とする請求項84に記載の方法。
- 前記処理する段階に基づいて、前記生きた甲殻類の続くハンドリングを制御する段階をさらに備えることを特徴とする請求項74から85のいずれか一項に記載の方法。
- 前記続くハンドリングは、
前記生きた甲殻類を格付けすること、
低品質の甲殻類を取捨選択すること、
前記生きた甲殻類のトラップへのエントリを許すか、または、ブロックすることの一つ以上を含むことを特徴とする請求項86に記載の方法。 - 前記撮像する段階は、前記撮像画像を含む複数の画像を撮像する段階を含み、
前記処理する段階は、前記複数の画像に基づいて前記生きた甲殻類の前記殻の体格を判断する段階を含むことを特徴とする請求項74から78のいずれか一項に記載の方法。 - 前記複数の画像は、異なるタイプの画像を含むことを特徴とする請求項88に記載の方法。
- 前記異なるタイプの画像の撮像を可能にするべく、複数の光学フィルタを、光学経路に出し入れして移動する段階をさらに備えることを特徴とする請求項89に記載の方法。
- 前記光学経路は、前記カメラと前記生きた甲殻類との間の画像光学経路を含むことを特徴とする請求項90に記載の方法。
- 前記光学経路は、光源と、前記生きた甲殻類との間の照射光経路を含むことを特徴とする請求項90に記載の方法。
- 位置情報を収集する段階と、
前記撮像された画像に前記位置情報を関連づける段階と
をさらに備えることを特徴とする請求項74から92のいずれか一項に記載の方法。 - 請求項48から73のいずれか一項に記載の装置を備え、
生きた甲殻類の画像を撮像し、前記生きた甲殻類の殻の体格を前記撮像された画像から判断する、マシンビジョンシステム。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361761417P | 2013-02-06 | 2013-02-06 | |
| US61/761,417 | 2013-02-06 | ||
| US201361904698P | 2013-11-15 | 2013-11-15 | |
| US61/904,698 | 2013-11-15 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015556351A Division JP2016512420A (ja) | 2013-02-06 | 2013-12-04 | 甲殻類の体格を判断するためのイメージング |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017195891A true JP2017195891A (ja) | 2017-11-02 |
| JP6503414B2 JP6503414B2 (ja) | 2019-04-17 |
Family
ID=51299111
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015556351A Pending JP2016512420A (ja) | 2013-02-06 | 2013-12-04 | 甲殻類の体格を判断するためのイメージング |
| JP2017111386A Active JP6503414B2 (ja) | 2013-02-06 | 2017-06-06 | 画像から甲殻類を判断する装置およびその方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015556351A Pending JP2016512420A (ja) | 2013-02-06 | 2013-12-04 | 甲殻類の体格を判断するためのイメージング |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US10111411B2 (ja) |
| EP (1) | EP2954313B1 (ja) |
| JP (2) | JP2016512420A (ja) |
| CN (2) | CN110057838B (ja) |
| AU (1) | AU2013377779B2 (ja) |
| CA (1) | CA2898895C (ja) |
| NZ (1) | NZ710440A (ja) |
| WO (1) | WO2014121371A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190068662A (ko) * | 2017-12-08 | 2019-06-19 | 한국로봇융합연구원 | 영상처리분석을 이용한 대상물 자동 정렬, 공급 시스템, 및 대상물 자동 정렬, 공급 방법 |
| KR102741061B1 (ko) * | 2024-06-05 | 2024-12-10 | 제주대학교 산학협력단 | 넙치 암수 판별 장치 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CL2014003045A1 (es) * | 2014-11-09 | 2015-01-09 | Pablo Santamarina Cuneo Juan | Dispositivo portátil para el registro en terreno de parámetros productivos y análisis de imágenes digitales de las estructuras externas e internas macroscópicas de los peces, comprende una caja en cuyo interior posee lámparas de iluminación, cámaras fotográficas digitales, filtros de luz, placas abatibles de muestreo de peces, celdas de registro de peso, tabla de registro de longitud, tarjeta electrónica y panel de control. |
| US20160203591A1 (en) * | 2015-01-09 | 2016-07-14 | Umm Al-Qura University | System and process for monitoring the quality of food in a refrigerator |
| CA2904958A1 (en) * | 2015-09-24 | 2017-03-24 | Canadian Centre For Fisheries Innovation (Ccfi) | A sensor-guided automated method and system for processing crustaceans |
| CN106305567A (zh) * | 2016-08-21 | 2017-01-11 | 盘锦光合蟹业有限公司 | 一种用于河蟹判别的图像识别方法 |
| PH12016000476B1 (en) * | 2016-12-21 | 2022-01-14 | De La Salle Univ | Method and apparatus for identifying the species of a target crab |
| US11627730B1 (en) * | 2017-08-07 | 2023-04-18 | Kris Poulsen And Associates, Llc | Method of harvesting crustaceans |
| US10881087B1 (en) | 2017-08-07 | 2021-01-05 | Kris Poulsen And Associates, Llc | Method of harvesting crustaceans |
| CN107439446A (zh) * | 2017-09-25 | 2017-12-08 | 无为县姚沟杭仁政家庭农场 | 基于手机app控制的螃蟹养殖用增氧系统及其使用方法 |
| CN116034917B (zh) | 2017-12-20 | 2026-01-13 | 英特维特国际股份有限公司 | 用于水产养殖中的鱼外部寄生虫监测的方法和系统 |
| WO2019121854A1 (en) | 2017-12-20 | 2019-06-27 | Intervet International B.V. | Method and system for external fish parasite monitoring in aquaculture |
| AU2018387713B2 (en) * | 2017-12-20 | 2024-08-08 | Intervet International B.V. | System for external fish parasite monitoring in aquaculture |
| EP3726971A1 (en) * | 2017-12-20 | 2020-10-28 | Intervet International B.V. | System for external fish parasite monitoring in aquaculture |
| CA3084287A1 (en) * | 2017-12-20 | 2019-06-27 | Intervet International B.V. | System for external fish parasite monitoring in aquaculture |
| WO2019136565A1 (en) * | 2018-01-11 | 2019-07-18 | Happy Fish Technologies Inc. | System and methods for real-time condition monitoring and traceability of seafood |
| US11337432B1 (en) * | 2018-04-03 | 2022-05-24 | University Of Maryland, College Park | Automated crab meat picking system and method |
| CN110074030B (zh) * | 2019-04-11 | 2020-11-20 | 浙江大学 | 一种融合机器视觉与红外检测技术的反馈式池塘循环水智能投饲系统 |
| CN111248169A (zh) * | 2020-01-16 | 2020-06-09 | 苏华 | 一种新型抄网及其数据查询方法、系统 |
| US11147251B1 (en) * | 2020-04-01 | 2021-10-19 | Lillian R Fu | Nature-inspired design and engineering of autonomous seafood capturing, sorting and delivering system |
| PE20230991A1 (es) * | 2020-11-24 | 2023-06-21 | Rynan Tech Pte Ltd | Sistema inteligente de monitorizacion del crecimiento y la salud en la acuicultura |
| CN112305081B (zh) * | 2020-11-30 | 2023-03-17 | 居天智慧(深圳)有限公司 | 基于高级食材的超声监测器 |
| CN112763487B (zh) * | 2020-12-09 | 2023-03-21 | 天津市水产研究所 | 一种水产动物高通量表型获取装置 |
| CN112841099A (zh) * | 2021-03-19 | 2021-05-28 | 东营市阔海水产科技有限公司 | 基于图像检测对虾头部病变的检测装置 |
| US20230122144A1 (en) * | 2021-10-18 | 2023-04-20 | Douglas D. BACON | System to Identify and Isolate Selected Crustaceans Using Flipping Device to View Ventral Surface |
| KR102620688B1 (ko) * | 2023-04-25 | 2024-01-03 | 주식회사 하버 | 인공지능 기반 갑각류 등급 산출 시스템 |
| CN118716260A (zh) * | 2024-07-09 | 2024-10-01 | 淮阴师范学院 | 一种日本沼虾成虾蜕皮阶段判断方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001078659A (ja) * | 1999-09-08 | 2001-03-27 | Nichirei Corp | 甲殻類の剥ぎ残し殻の検出排除方法及び装置 |
| US20060124071A1 (en) * | 2002-08-19 | 2006-06-15 | Watermark Seafoods Pty Ltd | System for harvesting crustaceans |
| WO2008016309A1 (en) * | 2006-08-04 | 2008-02-07 | Sinvent As | Multi-modal machine-vision quality inspection of food products |
| JP2010117177A (ja) * | 2008-11-11 | 2010-05-27 | Shimane Prefecture | 蟹の品質判別方法 |
| WO2010145881A1 (en) * | 2009-04-30 | 2010-12-23 | Wilcox Associates, Inc. | An inspection method and an inspection apparatus |
| US20110028849A1 (en) * | 2006-06-20 | 2011-02-03 | Sergei Viktorovich Kholodkevich | Method for biologically monitoring the environment (variants) and a system for carrying out said method |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2647635B1 (fr) | 1989-06-06 | 1992-02-14 | Simeon Nestor | Selecteur de poissons, ecrevisses et autres produits aquacoles |
| NO923094L (no) | 1992-08-07 | 1994-02-08 | Sinvent As | Framgangsmaate for bestemmelse av arten av og distribusjonen av vevstyper i levende organismer, saerig matinnhold i f.eks krabber |
| CN1181288A (zh) | 1997-10-15 | 1998-05-13 | 安玉平 | 一种限制门式分选虾类等级和将杂鱼分出的设备 |
| JP2008070925A (ja) * | 2006-09-12 | 2008-03-27 | Nippo Ltd | 食用カニの管理システム |
| US7912366B2 (en) * | 2006-12-11 | 2011-03-22 | Kyocera Corporation | System and method for providing photograph location information in a wireless communication device |
| CA2644200C (en) * | 2007-11-19 | 2017-04-04 | Timothy A. Burke | Seafood physical characteristic estimation system and method |
| CL2009002085A1 (es) * | 2009-11-16 | 2011-03-11 | Univ Pontificia Catolica Chile | Metodo y sistema para analizar automaticamente en tiempo real la calidad de muestras de carnes de pescado que circulan por una cinta transportadora, que permiten detectar defectos superficiales y clasificar las carnes segun patrones de calidad, en base a la segmentacion de las imagenes capturadas. |
| CN101923069B (zh) * | 2010-06-28 | 2012-12-12 | 中国水产科学研究院淡水渔业研究中心 | 一种判别不同产地中华绒螯蟹的方法 |
| CN101893612A (zh) * | 2010-07-09 | 2010-11-24 | 中国水产科学研究院黄海水产研究所 | 色谱法测定南极磷虾油中虾青素含量的方法 |
| CN102487853B (zh) * | 2011-11-18 | 2013-09-04 | 洪水根 | 鲎的人工育苗与养殖方法 |
| CA2833488C (en) * | 2012-12-19 | 2020-07-28 | Laitram, L.L.C. | Shrimp processing system and methods |
| CN203018326U (zh) | 2012-12-21 | 2013-06-26 | 浙江大学 | 一种基于机器视觉技术的对虾品质检测分级装置 |
-
2013
- 2013-12-04 AU AU2013377779A patent/AU2013377779B2/en active Active
- 2013-12-04 CN CN201910287240.7A patent/CN110057838B/zh active Active
- 2013-12-04 CN CN201380072442.0A patent/CN105164521B/zh active Active
- 2013-12-04 NZ NZ710440A patent/NZ710440A/en unknown
- 2013-12-04 WO PCT/CA2013/050930 patent/WO2014121371A1/en not_active Ceased
- 2013-12-04 CA CA2898895A patent/CA2898895C/en active Active
- 2013-12-04 EP EP13874729.0A patent/EP2954313B1/en active Active
- 2013-12-04 JP JP2015556351A patent/JP2016512420A/ja active Pending
- 2013-12-04 US US14/763,409 patent/US10111411B2/en active Active
-
2017
- 2017-06-06 JP JP2017111386A patent/JP6503414B2/ja active Active
-
2018
- 2018-09-28 US US16/146,235 patent/US10638730B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001078659A (ja) * | 1999-09-08 | 2001-03-27 | Nichirei Corp | 甲殻類の剥ぎ残し殻の検出排除方法及び装置 |
| US20060124071A1 (en) * | 2002-08-19 | 2006-06-15 | Watermark Seafoods Pty Ltd | System for harvesting crustaceans |
| US20110028849A1 (en) * | 2006-06-20 | 2011-02-03 | Sergei Viktorovich Kholodkevich | Method for biologically monitoring the environment (variants) and a system for carrying out said method |
| WO2008016309A1 (en) * | 2006-08-04 | 2008-02-07 | Sinvent As | Multi-modal machine-vision quality inspection of food products |
| JP2010117177A (ja) * | 2008-11-11 | 2010-05-27 | Shimane Prefecture | 蟹の品質判別方法 |
| WO2010145881A1 (en) * | 2009-04-30 | 2010-12-23 | Wilcox Associates, Inc. | An inspection method and an inspection apparatus |
Non-Patent Citations (1)
| Title |
|---|
| 原田和弘,大谷徹也: ""ズワイガニの硬ガニおよび水ガニの品質評価手法に関する検討"", 日本水産学会誌, vol. 第72巻、第6号, JPN6012060281, 15 November 2006 (2006-11-15), JP, pages 1103 - 1107, ISSN: 0003826990 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190068662A (ko) * | 2017-12-08 | 2019-06-19 | 한국로봇융합연구원 | 영상처리분석을 이용한 대상물 자동 정렬, 공급 시스템, 및 대상물 자동 정렬, 공급 방법 |
| KR102027039B1 (ko) * | 2017-12-08 | 2019-09-30 | 한국로봇융합연구원 | 영상처리분석을 이용한 대상물 자동 정렬, 공급 시스템, 및 대상물 자동 정렬, 공급 방법 |
| KR102741061B1 (ko) * | 2024-06-05 | 2024-12-10 | 제주대학교 산학협력단 | 넙치 암수 판별 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110057838A (zh) | 2019-07-26 |
| JP6503414B2 (ja) | 2019-04-17 |
| EP2954313A1 (en) | 2015-12-16 |
| CA2898895A1 (en) | 2014-08-14 |
| CN105164521B (zh) | 2019-05-07 |
| CN110057838B (zh) | 2022-05-10 |
| EP2954313A4 (en) | 2016-10-12 |
| AU2013377779B2 (en) | 2017-01-05 |
| AU2013377779A1 (en) | 2015-08-13 |
| NZ710440A (en) | 2018-10-26 |
| US20150359205A1 (en) | 2015-12-17 |
| CN105164521A (zh) | 2015-12-16 |
| JP2016512420A (ja) | 2016-04-28 |
| US10638730B2 (en) | 2020-05-05 |
| WO2014121371A1 (en) | 2014-08-14 |
| EP2954313B1 (en) | 2019-10-16 |
| US20190029234A1 (en) | 2019-01-31 |
| US10111411B2 (en) | 2018-10-30 |
| CA2898895C (en) | 2019-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6503414B2 (ja) | 画像から甲殻類を判断する装置およびその方法 | |
| DK181803B1 (en) | System for external fish parasite monitoring in aquaculture | |
| DK181217B1 (en) | Method and system for external fish parasite monitoring in aquaculture | |
| Elmasry et al. | Meat quality evaluation by hyperspectral imaging technique: an overview | |
| Sivertsen et al. | Automatic freshness assessment of cod (Gadus morhua) fillets by Vis/Nir spectroscopy | |
| Saberioon et al. | Application of machine vision systems in aquaculture with emphasis on fish: state‐of‐the‐art and key issues | |
| Stajnko et al. | Modelling apple fruit yield using image analysis for fruit colour, shape and texture | |
| KR101598898B1 (ko) | 음향 및 영상분석을 통한 넙치 질병 예방 시스템 | |
| Mehdizadeh et al. | Image analysis method to evaluate beak and head motion of broiler chickens during feeding | |
| Navarro et al. | IMAFISH_ML: A fully-automated image analysis software for assessing fish morphometric traits on gilthead seabream (Sparus aurata L.), meagre (Argyrosomus regius) and red porgy (Pagrus pagrus) | |
| Windham et al. | Visible/NIR spectroscopy for characterizing fecal contamination of chicken carcasses | |
| Duarte et al. | Measurement of sole activity by digital image analysis | |
| WO2016139323A1 (en) | System, device and method for observing piglet birth | |
| Ortega et al. | Early identification of mushy Halibut syndrome with hyperspectral image analysis | |
| Costa et al. | Application of non-invasive techniques to differentiate sea bass (Dicentrarchus labrax, L. 1758) quality cultured under different conditions | |
| Wold et al. | Rapid nondestructive determination of edible meat content in crabs (Cancer pagurus) by near-infrared imaging spectroscopy | |
| CN121399459A (zh) | 在肉生产和加工应用中使用多维x射线成像的系统和方法 | |
| Udayakumar | Visible light imaging | |
| CN113532616A (zh) | 基于计算机视觉的体重估计方法、装置及系统 | |
| FR2938654A1 (fr) | Procede et dispositif de controle de la qualite de fraicheur du poisson. | |
| Gamara et al. | Shrimp growth monitoring system using image processing techniques | |
| Ehsani et al. | Machine vision based citrus mass estimation during post harvesting using supervised machine learning algorithms | |
| ES2933045A1 (es) | Sistema de clasificacion automatizada de lomos de pescado y procedimiento asociado | |
| Zhang et al. | A dual-modal vision system for non-invasive real-time monitoring of broiler diarrhea under low-light conditions | |
| HK40060945A (en) | Body weight estimation method, device and system based on computer vision |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170814 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20171020 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20171020 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190325 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6503414 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |