JP2017198582A - 飛行軌跡取得装置 - Google Patents
飛行軌跡取得装置 Download PDFInfo
- Publication number
- JP2017198582A JP2017198582A JP2016090549A JP2016090549A JP2017198582A JP 2017198582 A JP2017198582 A JP 2017198582A JP 2016090549 A JP2016090549 A JP 2016090549A JP 2016090549 A JP2016090549 A JP 2016090549A JP 2017198582 A JP2017198582 A JP 2017198582A
- Authority
- JP
- Japan
- Prior art keywords
- flight trajectory
- laser scanner
- laser
- acquisition apparatus
- propeller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Traffic Control Systems (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
Description
ここで無人飛行機がカメラの他、レーザスキャナを搭載する場合、災害地の災害状況をレーザスキャナによる3次元点群により取得することができる。なお、3次元点群による周辺の物体の画像(以下、3次元点群画像という)については、例えば特許文献2等に記載がある。
しかしながら、災害地等での情報収集システムが、GPSで取得した位置情報を3次元点群画像中に表示させる画像処理ユニットを備えているとは限らず、この場合、無人飛行機の飛行軌跡を3次元点群画像に同時に表示させることができないという課題があった。
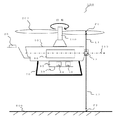
図1は、本実施の形態に係る飛行軌跡取得装置300を搭載した無人飛行機500を側面からみた全体構造を示す図である。ここで、無人飛行機500は空中を飛行する飛行体の一例であり、飛行体が有人、無人に関わらず本発明は効果を奏する。
無人飛行機500は飛行機本体100に搭載されるバッテリー80を電源として、プロペラ200を回転させ、また、レーザスキャナ10やGPSユニット20等を動作させる。プロペラ200はバッテリー駆動でなくガソリンを燃料とするものでもよい。
センサボックス40の中には、後述する処理部50、記憶装置60を備える。
GPSユニットはGPS受信機やGPSアンテナを備え、測位信号から測位計算を行い測位結果を出力する測位ユニットの一例である。無人飛行機500には無人での飛行を可能とする各種機器が搭載されるが、ここでは発明に関するものについて主に記載する。
飛行機本体100の側面には、レーザスキャナ10が設定されており、無人飛行機500の前方進行方向を機体軸510として、機体軸510に対し垂直方向に、機体軸510の全周に向けてスキャンしながらレーザ光Lを出射する。レーザスキャナ10の動作については、後述する。
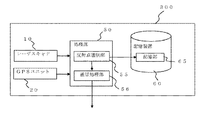
飛行軌跡取得装置300は、レーザスキャナ10と、GPSユニット20と、3次元点群の各点の位置などを演算する演算処理を実行する処理部50と、取得した3次元点群の情報を記憶する記憶装置60を備える。処理部50は、レーザスキャナ10とGPSユニット20からデータを入力し、処理結果を記憶装置に出力すると共に、図示しない地上局に通信で送信する。地上局では、レーザスキャナ10、GPSユニット20、IMUの結果を受信し、リアルタイムで画像化等の処理を行うことができる。また、記憶装置に記憶した結果を後処理で詳細に画像化する等のことを行える。
実施の形態1ではレーザスキャナ10は無人飛行機500の機体前方側面に、無人飛行機500の進行方向である機体軸510に対して垂直方向に、機体軸510を中心に全周(360°)方向に向けてレーザ光10を出射可能なように設置されている。
本実施の形態に係るレーザスキャナ10は、レーザスキャナ10から全周に向けて、スキャンしながら出射したレーザ光Lの一部のレーザ光Lがプロペラ200の面に照射される位置に設置されている。
反射点選別部55は物体の反射点(3次元点群)のうち、プロペラ200での反射点(飛行軌跡)を選別処理する。
通信処理部56は、地上の基地局との間で通信処理を行う。
センサボックス40は内部にIMU(Inertial Measurement Unit)を備え、GPS受信機で受信した測位信号と共に用いて高精度測位を実現する。
無人飛行機500は既に、地面から離陸し上空を飛行している状態にあり、レーザスキャナ10は全周360°方向にレーザ光Lを照射し、その反射点から物体の3次元点群を取得する状況にある。
これにより、レーザスキャナ10は、プロペラ200を物体とし、プロペラ200に当たった点を反射点をして、プロペラ200に当たった(照射された)反射点の3次元座標と、色情報と、反射強度といった情報を検出する。
全方位(360°)にレーザ光を出射するレーザスキャナ10のスキャン周期は一般に数十KHz〜数百KHzであり、また、飛行中の無人飛行機500のプロペラの回転周期は数百回転程度である。このことから、レーザスキャナ10から出射したレーザ光Lの一部はプロペラ200に当たらずプロペラ200を通過するものもあるが、一部はプロペラ200に照射され、照射されたプロペラの照射点を反射点として3次元座標と、色情報と、反射強度といった情報を検出することが可能である。
図1において、レーザスキャナ10は機体軸510に対して垂直方向の向きで、全周囲(360°)に向けてレーザ光Lを出射する。レーザ光Lが直下の地面を照射している場合を、レーザ光L2で表す。このときの地面の反射点がP2である。
一方、レーザ光Lの照射の向きが時系列に回転をし、プロペラ200の方向を向いた場合をレーザ光L1で表す。このときのプロペラ200における反射点をP1で表している。
実際には一般に数十KHz〜数百KHzでレーザ光をスキャンをしているが、ここでは模式的に20本のレーザ光でスキャンの様子を表している。
図2で、レーザスキャナ10からのレーザ光L0はプロペラ200に当たり、プロペラでの反射点P0を発生させる。レーザスキャナ10は、反射点P0の3次元座標と、色情報と、反射強度の情報を検出する。レーザ光L0の出射角度は、地面を向いた直下方向をゼロ[°]として、+170[°]程度である。
同様にレーザスキャナ10からのレーザ光L1はプロペラ200に当たり、プロペラでの反射点P1を発生させる。レーザスキャナ10は、反射点P1の3次元座標と、色情報と、反射強度の情報を検出する。レーザ光L1の出射角度は、地面を向いた直下方向をゼロ[°]として、+160[°]程度である。
次にレーザスキャナ10は、出射方向を回転させたレーザ光L2を出射する。レーザ光L2はプロペラ200に当たり、プロペラでの反射点P2を発生させる。レーザスキャナ10は、反射点P2の3次元座標と、色情報と、反射強度の情報を検出する。レーザ光L2の出射角度は、地面を向いた直下方向をゼロ[°]として、+150[°]程度である。
次にレーザスキャナ10は、出射方向を回転させたレーザ光L3を出射する。レーザ光L3はプロペラ200には当たらず、プロペラでの反射点は発生させない。レーザ光L3は遠方の物体で反射されると、レーザスキャナ10はその遠方の反射点の3次元座標と、色情報と、反射強度の情報を検出する。
以上を繰り返し、次に、レーザスキャナ10は、出射方向を回転させたレーザ光L17、L18、L19を出射する。レーザ光L17、L18、L19はプロペラ200に当たり、プロペラでの反射点P17、P18、P19を発生させる。レーザスキャナ10は、反射点P17、P18、P19の3次元座標と、色情報と、反射強度の情報を検出する。レーザ光L17、L18、L19の出射角度は、地面を向いた直下方向をゼロ[°]として、−150[°]、−160[°] 、−170[°]程度である。
ここで、プロペラ200は無人飛行機500と共に移動するものであるから、プロペラ200の移動経路を表示することは、すなわち、無人飛行機500の飛行軌跡を取得することに等しい。
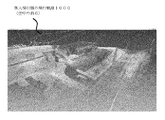
図4に示すように、地上の物体である建物や駐車場の3次元点群の画像を取得可能である。
この白点は、先述の無人飛行機500が飛行している間においてプロペラ200で反射した反射点の集合である3次元点群を表示したものであり、このように、無人飛行機500の飛行軌跡をレーザスキャナで取得した3次元点群の画像の中に、簡単に表示させることが可能である。
このようにして、無人飛行機500の飛行軌跡をレーザスキャナで取得した3次元点群の画像の中に、より明確に表示させることができる。
実施の形態2では、無人飛行機500の飛行軌跡にあたるプロペラ200で反射した反射点の集合である3次元点群のみを表示させる方法について、説明する。
レーザスキャナ10から出射したレーザ光がプロペラ200で反射する場合、その反射点の3次元座標位置と、GPSユニット20により取得したGPSユニットの3次元位置座標との間隔は、長くても数[m]程度である。
これに対し、地上の建物の反射点の3次元座標位置と、GPSユニット20により取得したGPSユニットの3次元位置座標との間隔は、数十[m]〜数百[m]となる。
そこで、レーザスキャナ10により取得した3次元点群の中で、GPSユニット20との間隔が数[m]の点は、プロペラ200で反射した点であると判断する。3次元点群のうち飛行軌跡とする判断条件は、GPSユニット20との間隔がL1[m]以下とすることができる。
なお、この判断条件については、地形の状況やレーザスキャナの性能等に応じて各種設定することが可能であり、上記判断条件に限られるものではない。
Claims (7)
- 飛行体に搭載され、
レーザ光をスキャンしながら照射し反射光を受信することにより、前記飛行体の周囲にある物体の反射点からなる3次元点群を取得するレーザスキャナを備え、
前記レーザスキャナは、前記レーザ光が前記飛行体の回転翼を照射する位置に設けられることを特徴とする飛行軌跡取得装置。 - 前記レーザスキャナから出射するレーザ光は、間欠的に前記回転翼を照射することを特徴とする請求項1記載の飛行軌跡取得装置。
- 前記レーザスキャナから出射するレーザ光は、上方向出射時に、前記回転翼を照射すると共に、下斜め方向出射時に、前記飛行体の周囲にある物体を照射することを特徴とする請求項1記載の飛行軌跡取得装置。
- 前記レーザ光が前記回転翼を照射した点の点群を、前記飛行体の飛行軌跡とすることを特徴とする請求項1〜3いずれか記載の飛行軌跡取得装置。
- 記憶装置を備え、
前記記憶装置は前記3次元点群の中から抽出された前記飛行体の飛行軌跡を記憶することを特徴とする請求項4記載の飛行軌跡取得装置。 - 測位ユニットと、
前記飛行軌跡を抽出する処理部と、を備え、
前記処理部は、同じ時刻の、前記測位ユニットが取得する位置座標と、前記3次元点群の位置座標との距離が所定値より小さい3次元点群を前記飛行軌跡として抽出することを特徴とする請求項5記載の飛行軌跡取得装置。 - 前記飛行体は無人ヘリコプタであり、
前記回転翼は前記無人ヘリコプタに備えられたプロペラであり、
前記レーザスキャナが取得した前記3次元点群を記憶する記憶装置を備えることを特徴とする請求項1〜6いずれか記載の飛行軌跡取得装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016090549A JP6519522B2 (ja) | 2016-04-28 | 2016-04-28 | 飛行軌跡取得装置、飛行体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016090549A JP6519522B2 (ja) | 2016-04-28 | 2016-04-28 | 飛行軌跡取得装置、飛行体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017198582A true JP2017198582A (ja) | 2017-11-02 |
| JP6519522B2 JP6519522B2 (ja) | 2019-05-29 |
Family
ID=60239185
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016090549A Expired - Fee Related JP6519522B2 (ja) | 2016-04-28 | 2016-04-28 | 飛行軌跡取得装置、飛行体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6519522B2 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10185566A (ja) * | 1996-12-19 | 1998-07-14 | Commuter Herikoputa Senshin Gijutsu Kenkyusho:Kk | 自機位置測定装置および方法 |
| JP2001215276A (ja) * | 2000-02-03 | 2001-08-10 | Tamagawa Seiki Co Ltd | ヘリコプター衝突防止警戒方法及び装置 |
| JP2008068711A (ja) * | 2006-09-13 | 2008-03-27 | Yamaha Motor Co Ltd | 無人ヘリコプタの飛行支援方法および飛行支援装置 |
| US20120212712A1 (en) * | 2008-10-01 | 2012-08-23 | U.S. Government As Represented By The Secretary Of The Army | Method for displaying images and/or other information on aircraft blades |
| JP2015191254A (ja) * | 2014-03-27 | 2015-11-02 | 日本電気株式会社 | 無人航空機、無人航空機の制御方法、および、管制システム |
| CN105203084A (zh) * | 2015-07-02 | 2015-12-30 | 汤一平 | 一种无人机3d全景视觉装置 |
| JP2016177949A (ja) * | 2015-03-19 | 2016-10-06 | 富士重工業株式会社 | 回転機構及び回転式スキャナ |
-
2016
- 2016-04-28 JP JP2016090549A patent/JP6519522B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10185566A (ja) * | 1996-12-19 | 1998-07-14 | Commuter Herikoputa Senshin Gijutsu Kenkyusho:Kk | 自機位置測定装置および方法 |
| JP2001215276A (ja) * | 2000-02-03 | 2001-08-10 | Tamagawa Seiki Co Ltd | ヘリコプター衝突防止警戒方法及び装置 |
| JP2008068711A (ja) * | 2006-09-13 | 2008-03-27 | Yamaha Motor Co Ltd | 無人ヘリコプタの飛行支援方法および飛行支援装置 |
| US20120212712A1 (en) * | 2008-10-01 | 2012-08-23 | U.S. Government As Represented By The Secretary Of The Army | Method for displaying images and/or other information on aircraft blades |
| JP2015191254A (ja) * | 2014-03-27 | 2015-11-02 | 日本電気株式会社 | 無人航空機、無人航空機の制御方法、および、管制システム |
| JP2016177949A (ja) * | 2015-03-19 | 2016-10-06 | 富士重工業株式会社 | 回転機構及び回転式スキャナ |
| CN105203084A (zh) * | 2015-07-02 | 2015-12-30 | 汤一平 | 一种无人机3d全景视觉装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6519522B2 (ja) | 2019-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7263630B2 (ja) | 無人航空機による3次元再構成の実行 | |
| EP3435282B1 (en) | Laser speckle system for an aircraft | |
| US11644839B2 (en) | Systems and methods for generating a real-time map using a movable object | |
| CN108090957B (zh) | 基于bim的测绘地形的方法 | |
| US11032527B2 (en) | Unmanned aerial vehicle surface projection | |
| JP7141538B2 (ja) | 森林計測を行う方法、森林計測システム、無人航空機の飛行経路を決定する方法、撮影方法、散布方法およびコンピュータプログラム | |
| Mian et al. | Direct georeferencing on small unmanned aerial platforms for improved reliability and accuracy of mapping without the need for ground control points | |
| JP5101474B2 (ja) | 無人機及び無人機用空中見張りシステム | |
| CN117369489A (zh) | 碰撞规避系统、深度成像系统、交通工具、地图生成器及其方法 | |
| JP6290735B2 (ja) | 測量方法 | |
| CN111448476A (zh) | 在无人飞行器与地面载具之间共享绘图数据的技术 | |
| JP7254934B2 (ja) | 森林計測を行う方法、森林計測システムおよびコンピュータプログラム | |
| US20160335901A1 (en) | Control of autonomous rotorcraft in limited communication environments | |
| US11587449B2 (en) | Systems and methods for guiding a vertical takeoff and landing vehicle to an emergency landing zone | |
| JP2014119828A (ja) | 自律飛行ロボット | |
| JP6675537B1 (ja) | 飛行経路生成装置、飛行経路生成方法とそのプログラム、構造物点検方法 | |
| JP6138326B1 (ja) | 移動体、移動体の制御方法、移動体を制御するプログラム、制御システム、及び情報処理装置 | |
| EP3757512B1 (en) | Aircraft imaging system using projected patterns on featureless surfaces | |
| CN113187671B (zh) | 一种应用无人机进行风轮偏航角的确定方法 | |
| EP3869486A1 (en) | Systems and methods for guiding a vertical takeoff and landing vehicle to an emergency landing zone | |
| JP2023072593A (ja) | 風車点検方法および風車点検システム | |
| JP2023041675A (ja) | ドローン作業支援システム及びドローン作業支援方法 | |
| JP2019016197A (ja) | 移動体誘導システム | |
| KR102716193B1 (ko) | 드론을 이용한 엑스레이 영상 획득 시스템 | |
| CN115825067B (zh) | 一种基于无人机的地质信息采集方法、系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190408 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6519522 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |