JP2017201265A - 検体処理システム - Google Patents
検体処理システム Download PDFInfo
- Publication number
- JP2017201265A JP2017201265A JP2016093032A JP2016093032A JP2017201265A JP 2017201265 A JP2017201265 A JP 2017201265A JP 2016093032 A JP2016093032 A JP 2016093032A JP 2016093032 A JP2016093032 A JP 2016093032A JP 2017201265 A JP2017201265 A JP 2017201265A
- Authority
- JP
- Japan
- Prior art keywords
- local
- devices
- unit
- instruction
- processing system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Programmable Controllers (AREA)
Abstract
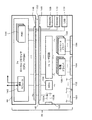
【解決手段】センタープロセッサは、変換テーブル98に基づいて、シーケンスデータ92から複数の命令列を生成する(符号96参照)。複数の命令列が内部ネットワーク34を介して複数のローカルユニットへ送られる。各ローカルユニットはローカルプロセッサ(符号104参照)及びI/Oボード(符号106参照)を有する。中間レイヤ100から入出力レイヤ112までが共通プラットフォーム116を構成する。機器の接続先を変更しても変換テーブル98を修正するだけで済む。各機器グループの近くに各ローカルユニットを配置すれば配線が簡素化される。
【選択図】図6
Description
Claims (10)
- 検体を処理するための複数の機器を備える少なくとも1つの装置を含み、
前記複数の機器に対して少なくとも1つの機器グループが定められ、
前記装置は、
シーケンスデータに基づいて命令列を生成するセンターユニットと、
前記機器グループに対して接続され、自己宛の命令列を実行することにより前記機器グループを制御するローカルユニットと、
を含み、
前記センターユニットは、
制御対象機器を特定する論理名ごとに、当該論理名に対応するローカルユニット及び物理名を特定するための変換テーブルと、
前記変換テーブルに基づいて前記シーケンスデータに含まれる命令中の論理名から当該命令を送るローカルユニットを判定し且つ当該命令中の論理名を物理名に変換することによって、前記命令列を生成する生成手段と、
を含むことを特徴とする検体処理システム。 - 請求項1記載のシステムにおいて、
前記複数の機器に対して複数の機器グループが定められ、
前記装置は前記複数の機器グループに対応する複数のローカルユニットを含み、
前記センターユニットは前記シーケンスデータに基づいて前記複数のユニットに与える複数の命令列を生成する、
ことを特徴とする検体処理システム。 - 請求項2記載のシステムにおいて、
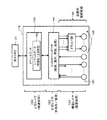
前記装置は、前記センターユニットと前記複数のローカルユニットとの間に設けられた内部ネットワークを含み、
前記内部ネットワークを介して前記センターユニットから前記複数のローカルユニットへ前記複数の命令列が送られる、
ことを特徴とする検体処理システム。 - 請求項3記載のシステムにおいて、
前記内部ネットワークを介して前記センターユニットと前記複数のローカルユニットとの間でパケット通信が実行され、
前記生成手段は前記シーケンスデータに含まれる命令中の論理名に基づいてパケット宛先を判定する、
ことを特徴とする検体処理システム。 - 請求項1記載のシステムにおいて、
前記ローカルユニットは、
前記センターユニットから送られてきた前記自己宛の命令列を実行するローカルプロセッサを搭載したローカルコントローラボードと、
前記ローカルコントローラボードに対して接続されたボードであって、前記ローカルプロセッサの制御に従って、前記機器グループに対して出力する信号列を生成し且つ前記機器グループから入力した信号列を処理するI/Oボードと、
を含むことを特徴とする検体処理システム。 - 請求項5記載のシステムにおいて、
当該検体処理システムは複数の装置を有し、
前記各装置が、前記センターユニットと、前記ローカルユニットとしての前記ローカルコントローラボード及び前記I/0ボードと、を有し、
前記複数の装置に設けられた複数のセンターユニットが同じハードウエア構成を有し、
前記複数の装置に設けられた複数のローカルコントローラボードが同じハードウエア構成を有する、
ことを特徴とする検体処理システム。 - 請求項6記載のシステムにおいて、
前記複数の装置に設けられた複数のI/Oボードが同じハードウエア構成を有する、
ことを特徴とする検体処理システム。 - 請求項5記載のシステムにおいて、
前記ローカルコントローラボードは第1コネクタを有し、
前記I/Oボードは前記第1コネクタに直接的に又はケーブルを介して間接的に接続される第2コネクタを有する、
ことを特徴とする検体処理システム。 - 請求項2記載のシステムにおいて、
前記装置内において前記各ローカルユニットが前記各機器グループに対応する位置に配置され、これによって前記装置内において前記複数のローカルユニットが分散配置され、
前記装置内には、前記センターユニット及び前記複数のローカルユニットの相互間を接続するためのネットワークケーブルが敷設された、
ことを特徴とする検体処理システム。 - 検体を処理するための複数の装置を含む検体処理システムにおいて、前記装置ごとに実行される制御方法であって、
前記各装置は、シーケンスデータに基づいて命令列を生成するセンターユニットと、複数の機器からなる機器グループに接続されたローカルユニットと、前記センターユニットと前記ローカルユニットとの間で通信を行うための内部ネットワークと、を含み、
前記シーケンスデータに含まれる命令においては制御対象機器が論理名で特定され、
当該制御方法は、
前記装置ごとの前記センターユニットにおいて、前記シーケンスデータに含まれる命令中の論理名から当該命令を送るローカルユニットを判定し且つ当該命令中の論理名を物理名に変換することによって、前記命令列を生成する工程と、
前記装置ごとの前記ローカルユニットにおいて、自己宛の命令列を実行して前記複数の機器を制御する工程と、
を含むことを特徴とする制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016093032A JP6271635B2 (ja) | 2016-05-06 | 2016-05-06 | 検体処理システム |
| CN201780027074.6A CN109073665B (zh) | 2016-05-06 | 2017-04-20 | 检体处理系统以及控制方法 |
| US16/098,725 US10914750B2 (en) | 2016-05-06 | 2017-04-20 | Sample processing system and control method |
| PCT/JP2017/015868 WO2017191761A1 (ja) | 2016-05-06 | 2017-04-20 | 検体処理システム及び制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016093032A JP6271635B2 (ja) | 2016-05-06 | 2016-05-06 | 検体処理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017201265A true JP2017201265A (ja) | 2017-11-09 |
| JP6271635B2 JP6271635B2 (ja) | 2018-01-31 |
Family
ID=60202947
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016093032A Active JP6271635B2 (ja) | 2016-05-06 | 2016-05-06 | 検体処理システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10914750B2 (ja) |
| JP (1) | JP6271635B2 (ja) |
| CN (1) | CN109073665B (ja) |
| WO (1) | WO2017191761A1 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09274044A (ja) * | 1996-04-03 | 1997-10-21 | Hitachi Ltd | 分散処理形分析装置 |
| JPH1096731A (ja) * | 1996-09-24 | 1998-04-14 | Hitachi Ltd | シャットダウン制御装置および分散制御方式 |
| JPH10262093A (ja) * | 1997-03-19 | 1998-09-29 | Hitachi Ltd | 伝送制御方法 |
| JP2003316576A (ja) * | 2002-04-25 | 2003-11-07 | Hitachi Ltd | アプリケーション制御方法及びその実施装置並びにその処理プログラム |
| JP2009047592A (ja) * | 2007-08-21 | 2009-03-05 | Shimadzu Corp | 分析装置 |
| US20120144009A1 (en) * | 2009-05-27 | 2012-06-07 | Hitachi High-Technologies Corporation | Sample-test-device management server, sample test device, sample test system, and sample test method |
| JP2014115206A (ja) * | 2012-12-11 | 2014-06-26 | Shimadzu Corp | 分析システム及びその制御方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6023399A (en) | 1996-09-24 | 2000-02-08 | Hitachi, Ltd. | Decentralized control system and shutdown control apparatus |
| JP3425912B2 (ja) | 1999-11-30 | 2003-07-14 | アロカ株式会社 | 検体処理システム |
| JP3723110B2 (ja) | 2001-09-27 | 2005-12-07 | アロカ株式会社 | 検体処理システム |
| US7613574B2 (en) * | 2005-10-28 | 2009-11-03 | S-Matrix | System and method for automating scientific and engineering experimentation for deriving surrogate response data |
| US8423989B2 (en) * | 2008-05-02 | 2013-04-16 | Synchonoss Technologies, Inc. | Software parameter management |
| WO2011000407A1 (en) * | 2009-06-30 | 2011-01-06 | Agilent Technologies, Inc. | Liquid chromatography adjustment for method-conformally compensating deviations from ideal behavior |
| JP5602603B2 (ja) * | 2010-12-01 | 2014-10-08 | シスメックス株式会社 | 検体測定装置 |
| EP2721452A1 (en) * | 2011-06-20 | 2014-04-23 | ABB Research Ltd. | A method and a system for online and dynamic schedule configuration of control applications in a distributed control system |
-
2016
- 2016-05-06 JP JP2016093032A patent/JP6271635B2/ja active Active
-
2017
- 2017-04-20 CN CN201780027074.6A patent/CN109073665B/zh active Active
- 2017-04-20 WO PCT/JP2017/015868 patent/WO2017191761A1/ja not_active Ceased
- 2017-04-20 US US16/098,725 patent/US10914750B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09274044A (ja) * | 1996-04-03 | 1997-10-21 | Hitachi Ltd | 分散処理形分析装置 |
| JPH1096731A (ja) * | 1996-09-24 | 1998-04-14 | Hitachi Ltd | シャットダウン制御装置および分散制御方式 |
| JPH10262093A (ja) * | 1997-03-19 | 1998-09-29 | Hitachi Ltd | 伝送制御方法 |
| JP2003316576A (ja) * | 2002-04-25 | 2003-11-07 | Hitachi Ltd | アプリケーション制御方法及びその実施装置並びにその処理プログラム |
| JP2009047592A (ja) * | 2007-08-21 | 2009-03-05 | Shimadzu Corp | 分析装置 |
| US20120144009A1 (en) * | 2009-05-27 | 2012-06-07 | Hitachi High-Technologies Corporation | Sample-test-device management server, sample test device, sample test system, and sample test method |
| JP2014115206A (ja) * | 2012-12-11 | 2014-06-26 | Shimadzu Corp | 分析システム及びその制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017191761A1 (ja) | 2017-11-09 |
| US20190137527A1 (en) | 2019-05-09 |
| US10914750B2 (en) | 2021-02-09 |
| CN109073665A (zh) | 2018-12-21 |
| CN109073665B (zh) | 2022-04-15 |
| JP6271635B2 (ja) | 2018-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7491367B2 (en) | System and method for providing a standardized state interface for instrumentation | |
| KR101516270B1 (ko) | 전자부품 취급 장치 및 방법 | |
| CN104635659B (zh) | 多选项设备的设备类别信息支持 | |
| CN109565526B (zh) | 用于将数据源系统连接到it系统上的方法和网关 | |
| US20130131833A1 (en) | Method, computer program, computer-readable medium and processing unit for controlling field devices | |
| EP3428750A1 (en) | Slave device, method for controlling slave device, information processing program, and recording medium | |
| AU2013265318B2 (en) | Distributed automation apparatus for laboratory diagnostics | |
| EP3318935A1 (en) | Method of operating a process module in a modular process plant | |
| KR20160147901A (ko) | 자동화 시스템용의 단말기, 단말기 배열체, 및 자동화 시스템용의 단말기를 작동하기 위한 방법 | |
| JP6271635B2 (ja) | 検体処理システム | |
| KR101038619B1 (ko) | 로봇용 다자유도 스마트 액추에이터를 위한 네트워크 기반 제어 모듈 | |
| Sridevi et al. | Establishing EtherCAT communication between industrial PC and variable frequency drive | |
| US10427292B2 (en) | Linked micromechanical positioning apparatus for real-time testing and measurement | |
| US20240420832A1 (en) | Specimen inspection automation system and fixed position information allocation method | |
| US7757205B2 (en) | System for preparing a standard framework for automation appliances | |
| CN114697293B (zh) | 一种数据传输方法、下位机和控制器 | |
| US20190015975A1 (en) | Robotic positioning system | |
| Golas et al. | A purpose-built open source liquid handler for industry-class automated experiments | |
| CN115718462A (zh) | 一种用于设备集成与自动化控制的方法及装置 | |
| EP3428753A1 (en) | Automation system and method with cycle-based and event-based automation devices | |
| Dimitrova et al. | Examination of the Possibilities of Integration of Control Systems to the Requirements of the" Industry 4.0" Concept of a Single-function Mechatronic Device and of a Multi-function Mechatronic System | |
| CN103529767B (zh) | 具有输出设备的自动化系统 | |
| Reinhart et al. | Automatic Configuration (Plug & Produce) of Robot Systems–Data-Interpretation and Exchange | |
| KR20190041140A (ko) | 모듈 조합형 생산 시스템을 위한 자가 설정/제어 방법 | |
| CN117596708A (zh) | 用于通过IO-Link主站操作多个IO-Link设备的方法和装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170904 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6271635 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |