JP2017201325A - 振動式センサ用に駆動信号を生成する方法 - Google Patents
振動式センサ用に駆動信号を生成する方法 Download PDFInfo
- Publication number
- JP2017201325A JP2017201325A JP2017135247A JP2017135247A JP2017201325A JP 2017201325 A JP2017201325 A JP 2017201325A JP 2017135247 A JP2017135247 A JP 2017135247A JP 2017135247 A JP2017135247 A JP 2017135247A JP 2017201325 A JP2017201325 A JP 2017201325A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- vibration
- drive signal
- sample
- phase difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H11/00—Measuring mechanical vibrations or ultrasonic, sonic or infrasonic waves by detecting changes in electric or magnetic properties
- G01H11/06—Measuring mechanical vibrations or ultrasonic, sonic or infrasonic waves by detecting changes in electric or magnetic properties by electric means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N9/00—Investigating density or specific gravity of materials; Analysing materials by determining density or specific gravity
- G01N9/002—Investigating density or specific gravity of materials; Analysing materials by determining density or specific gravity using variation of the resonant frequency of an element vibrating in contact with the material submitted to analysis
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/76—Devices for measuring mass flow of a fluid or a fluent solid material
- G01F1/78—Direct mass flowmeters
- G01F1/80—Direct mass flowmeters operating by measuring pressure, force, momentum, or frequency of a fluid flow to which a rotational movement has been imparted
- G01F1/84—Coriolis or gyroscopic mass flowmeters
- G01F1/8409—Coriolis or gyroscopic mass flowmeters constructional details
- G01F1/8431—Coriolis or gyroscopic mass flowmeters constructional details electronic circuits
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/76—Devices for measuring mass flow of a fluid or a fluent solid material
- G01F1/78—Direct mass flowmeters
- G01F1/80—Direct mass flowmeters operating by measuring pressure, force, momentum, or frequency of a fluid flow to which a rotational movement has been imparted
- G01F1/84—Coriolis or gyroscopic mass flowmeters
- G01F1/8409—Coriolis or gyroscopic mass flowmeters constructional details
- G01F1/8436—Coriolis or gyroscopic mass flowmeters constructional details signal processing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F23/00—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm
- G01F23/22—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm by measuring physical variables, other than linear dimensions, pressure or weight, dependent on the level to be measured, e.g. by difference of heat transfer of steam or water
- G01F23/28—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm by measuring physical variables, other than linear dimensions, pressure or weight, dependent on the level to be measured, e.g. by difference of heat transfer of steam or water by measuring the variations of parameters of electromagnetic or acoustic waves applied directly to the liquid or fluent solid material
- G01F23/296—Acoustic waves
- G01F23/2966—Acoustic waves making use of acoustical resonance or standing waves
- G01F23/2967—Acoustic waves making use of acoustical resonance or standing waves for discrete levels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K11/00—Measuring temperature based upon physical or chemical changes not covered by groups G01K3/00, G01K5/00, G01K7/00 or G01K9/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N11/00—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties
- G01N11/10—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material
- G01N11/16—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material by measuring damping effect upon oscillatory body
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N9/00—Investigating density or specific gravity of materials; Analysing materials by determining density or specific gravity
- G01N9/32—Investigating density or specific gravity of materials; Analysing materials by determining density or specific gravity by using flow properties of fluids, e.g. flow through tubes or apertures
- G01N9/34—Investigating density or specific gravity of materials; Analysing materials by determining density or specific gravity by using flow properties of fluids, e.g. flow through tubes or apertures by using elements moving through the fluid, e.g. vane
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N9/00—Investigating density or specific gravity of materials; Analysing materials by determining density or specific gravity
- G01N9/002—Investigating density or specific gravity of materials; Analysing materials by determining density or specific gravity using variation of the resonant frequency of an element vibrating in contact with the material submitted to analysis
- G01N2009/006—Investigating density or specific gravity of materials; Analysing materials by determining density or specific gravity using variation of the resonant frequency of an element vibrating in contact with the material submitted to analysis vibrating tube, tuning fork
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Immunology (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Fluid Mechanics (AREA)
- Acoustics & Sound (AREA)
- Thermal Sciences (AREA)
- Electromagnetism (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Measuring Volume Flow (AREA)
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
- Measuring Fluid Pressure (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Mixers With Rotating Receptacles And Mixers With Vibration Mechanisms (AREA)
Abstract
Description
下記の実施形態は、振動式センサに関し、特に振動式センサ用に駆動信号を生成する方法に関する。
振動式デンシトメータ及び振動式粘度計のような振動式センサは、特徴付けられる流体の存在下で振動する振動要素の動きを検知することによって作動する。密度、粘度、温度等の流体に関する特性は、振動要素に繋がった1以上の動きトランスデューサから受信する振動信号を処理することによって決定される。振動要素の振動は一般的に、流体と組み合わさる振動要素の結合された質量、剛性及び減衰特性に影響される。
濾過されないノイズが駆動信号で再生される。駆動信号中のノイズは周波数測定での不正確さと同様に、駆動の不安定性も引き起こす。
従って、閉ループアプローチに関連した周波数測定が不要である振動式センサ用の駆動信号を生成する方法を求めるニーズがある。
振動式センサ用の駆動信号を生成する方法が提供される。実施形態に従って、方法は、振動信号を付与するように構成された振動要素を振動させる工程と、受信回路を用いて振動要素から振動信号を受信する工程とを備える。方法は更に、受信回路及び振動要素に連結された駆動回路を用いて、振動要素を振動させる駆動信号を生成する工程と、生成された駆動信号の位相を振動信号の位相と比較する工程を備える。
態様に従って、振動式センサ(5)用の駆動信号を生成する方法(600)は、振動信号を付与するように構成された振動要素(104、510)を振動させる工程と、受信回路(1
34)を用いて振動要素(104、510)から振動信号を受信する工程と、受信回路(134)及び振動要素(104、510)に連結された駆動回路(138)を用いて、振動要素(104、510)を振動させる駆動信号を生成する工程と、生成された駆動信号の位相を振
動信号の位相と比較する工程を備える。
方法(600)は更に、生成された駆動信号のサンプルと振動信号のサンプルの少なくとも1つから、少なくとも1つの周波数成分を除去する工程を備えるのが好ましい。
生成された駆動信号のサンプルを振動信号のサンプルと比較する工程は、生成された駆動信号のサンプルと振動信号のサンプルの相関付けを実行する工程を備えるのが好ましい。
生成された駆動信号の位相を振動信号の位相と比較する工程は、生成された駆動信号の位相と振動信号の位相間の測定された位相差φmを決定する工程、及び測定された位相差φmを目標位相差φtと比較し、測定された位相差φmが目標位相差φtにあるかを決定する工程を備えるのが好ましい。
方法(600)は更に、生成された駆動信号の位相と振動信号の位相の比較から、コマンド周波数ωを決定する工程と、信号生成器(147c)にコマンド周波数を供給する工程と
、該信号生成器(147c)を用いてコマンド周波数ωにて駆動信号を生成する工程を備え
る。
方法(600)の信号生成器(147c)を用いてコマンド周波数ωにて駆動信号を生成す
る工程は、駆動シンセサイザ(544)を用いて合成された駆動信号を形成する工程と、デジタル/アナログコンバータ(534)を用いて合成された駆動信号を生成された駆動信号
に変換する工程を含むのが好ましい。
04、510)、振動要素(104)から振動信号を受信する受信回路(134)、受信回路(134)及び振動要素(104)に連結された駆動回路(138)を備え、駆動回路(138)
は振動要素(104、510)を振動させる駆動信号を生成し、且つ生成された駆動信号の位相と振動信号の位相とを比較するように構成されている。
駆動回路(138)は更に、生成された駆動信号のサンプルと振動信号のサンプルの少なくとも1つから、少なくとも1つの周波数成分を除去するように構成されるのが好ましい。
駆動回路(138)は更に、生成された駆動信号のサンプルと振動信号のサンプルの相関付けを実行するように構成されているのが好ましい。
駆動回路(138)は、生成された駆動信号の位相と振動信号の位相間の測定された位相差φmを決定し、及び測定された位相差φmを目標位相差φtと比較し、測定された位相差φmが目標位相差φtにあるかを決定するように構成されているのが好ましい。
駆動回路(138)は、位相検知器(147b、542)と信号生成器(147c)を備え、該位相検知器(147b)は、生成された駆動信号の位相及び振動信号の位相の比較からコマ
ンド周波数ωを決定し、該コマンド周波数ωを信号生成器(147c)に供給するように構
成され、信号生成器(147c)はコマンド周波数ωにて駆動信号を生成するように構成さ
れているのが好ましい。
信号生成器(147c)は、合成された駆動信号を形成するように構成された駆動シンセ
サイザ(544)と、合成された駆動信号を生成された駆動信号に変換するように構成されたデジタル/アナログコンバータ(534)を備えるのが好ましい。
当業者は、これらの例示から本発明の範囲内にある変形例を理解するだろう。当業者は、下記に述べられた特徴が種々の方法で組み合わされて、振動式センサ用の駆動信号を生成する多数の変形例を形成することを理解するだろう。その結果、本発明は、下記に述べられた特定の例にではなく特許請求の範囲とそれらの等価物によってのみ限定される。
る。このリストは網羅したものでなく、振動式センサ5は他の流体特性を測定し、決定し得る。
求の範囲内である。
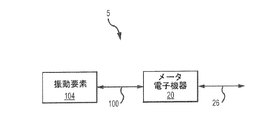
更に、メータ電子機器20は、通信リンク26を介して情報を得ることができる。
例えば、メータ電子機器20はコマンド、更新、作動値の変更及び/又はプログラムの更
新を通信リンク26を介して受信する。
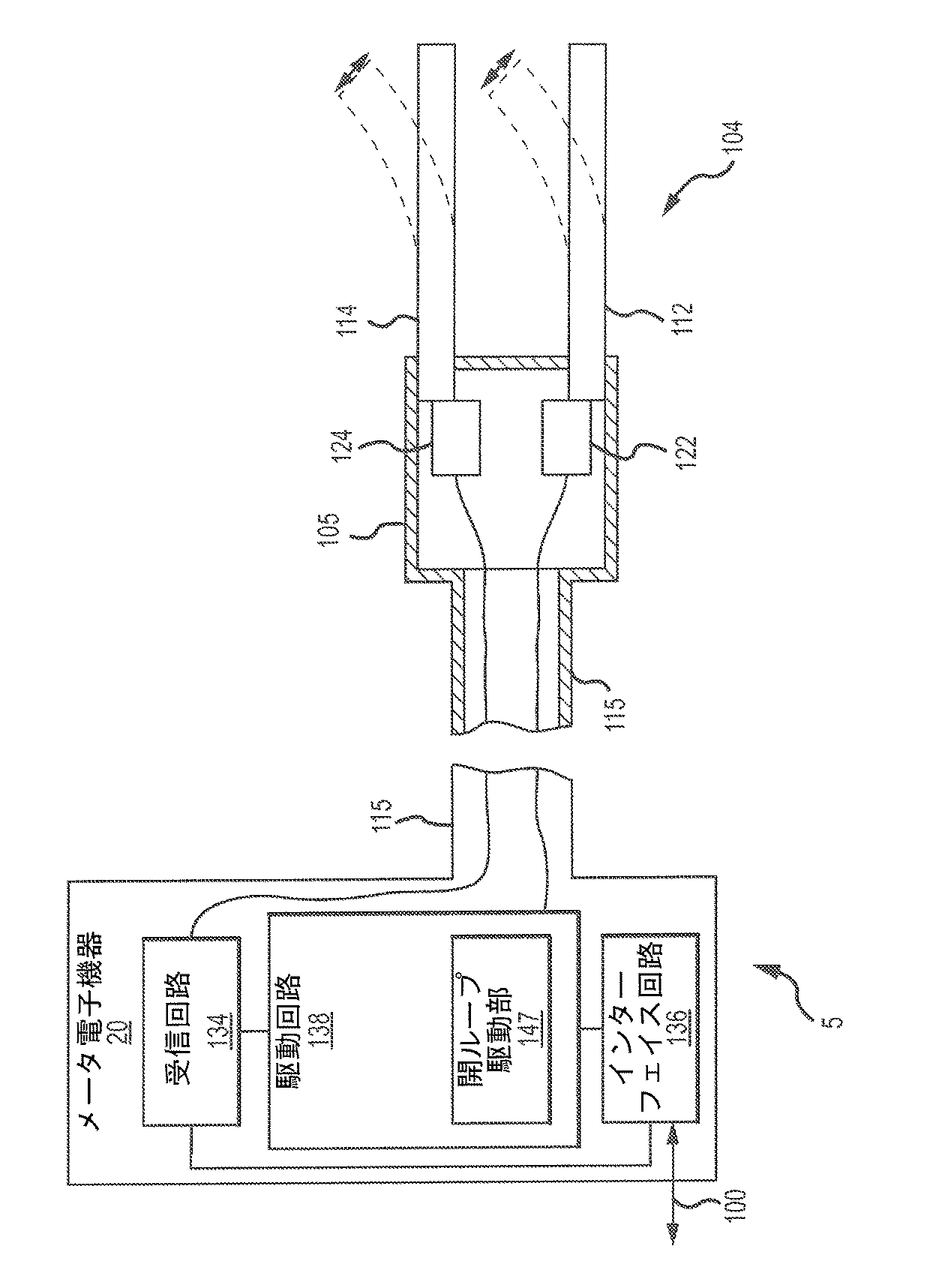
インターフェイス回路136は振動測定信号を通信し、1つ以上の外部デバイスに決定された流体特性を伝える。メータ電子機器20は、振動信号周波数及び振動信号の振動信号振幅のような振動信号特性をインターフェイス回路136を介して送信することができる。メータ電子機器20は、インターフェイス回路136を介して、とりわけ流体の密度及び/又は粘性のような流体測定を送信する。他の流体の測定も考えられ、それらは記載
と特許請求の範囲内である。
更に、インターフェイス回路136は、例えば測定値を生成するためのコマンド及びデータを含む通信を外部デバイスから受信する。いくつかの実施形態では、受信回路134は、駆動回路138に連結されて、振動信号を駆動回路138に供給する
された駆動信号の特性を修正する。周囲の流体によって影響を受けるように、振動要素104は略共振振動数に維持される。駆動回路138は開ループ駆動部147を含む。開ループ駆動部147は駆動回路138によって用いられて、駆動信号を生成し、生成された駆動信号を振動要素104に(例えば、第1ピエゾ要素122に)供給する。幾つかの実施形態では、開ループ駆動部147は、最初の周波数ω0で開始して、目標位相差φtに達
する駆動信号を生成する。開ループ駆動部147は振動信号からのフィードバックに基づいて作動しない。従って、開ループ駆動部147は、下記により詳細に記述されるように、振動信号を濾過することによりノイズの無い生成された駆動信号を時間遅れなしで供給する。
開ループ駆動部147は、位相検知器147bに連結されるアナログ/デジタル変換器147aを含む。位相検知器147bは、信号生成器147cに連結される。
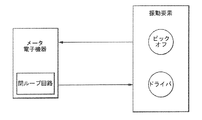
更に、第1ピエゾ要素122と第2ピエゾ要素124を含む振動要素104が示される。開ループ駆動部147は、信号をサンプリングし、処理し、生成する1本以上のコード又はプログラムを実行するように構成されるデジタル信号プロセッサで実行され得る。更に又は或いは、開ループ駆動部147はデジタル信号プロセッサなどに連結された電子回路で実行され得る。
に送信される。アナログ入力フィルタ138aは、振動信号がアナログ/デジタル変換器147aによってサンプリングされる前に、振動信号を濾過する。示された実施形態では、
アナログ入力フィルタ138aはカットオフ周波数を有するローパスフィルタを備え、あ
らゆる適切なローパスフィルタが用いられ得るが、該カットオフ周波数は開ループ駆動部147のサンプリング速度の約半分である。ローパスフィルタは演算増幅器フィルタのような分配型又はディスクリートのあらゆる適切な部品が用いられるが、誘導子、コンデンサ及び抵抗器のような受動素子によって提供される。
を比較する。位相検知器147bは、図5に関して下記により詳細に記述されるように、
2つの信号間の位相差を検知する信号をサンプリングし、処理し、生成する1以上のコードあるいはプログラムを実行するように構成されたプロセッサである。図4の実施形態に言及して、比較により振動信号のサンプルと生成された駆動信号のサンプル間の測定された位相差φmが付与される。
と同じ又は約45°であれば、ゼロである。しかし、代替の実施形態では、あらゆる適切な目標位相差φtが用いられ得る。測定された位相差φmと目標位相差φtとの比較を用いて、位相検知器147bはコマンド周波数ωを生成することが出来る。
を有する。コマンド周波数ω又は最初の周波数ω0は、信号生成器147cに供給される
。
は、生成された駆動信号は他の実施形態の他の部品に送信される。従って、これら及び他の実施形態にて、生成された駆動信号は、以下により詳細に記載する如く、測定された位相差φmと目標位相差φtとの差から決定される。
む。振動利得部520は、符号復号器(CODEC)ブロック530にあるアナログ/デジタル変換器532に連結される。アナログ/デジタル変換器532は、デジタル信号プロセッサ(DSP)ブロック540内の位相検知器542に連結される。DSPブロック540は、さらに
位相検知器542から信号を受信する駆動シンセサイザ544を含む。駆動シンセサイザ544は、駆動利得部550に連結されるデジタル/アナログ変換器534に連結される
。駆動利得部550は、駆動ステージ560及びアナログ/デジタル変換器532に連結
される。駆動利得部550は、符号復号器ブロック530によって提供される、生成された駆動信号を増幅することができる。
タル変換器532は、振動利得部520から振動信号を受信する。代替の実施形態では、振動信号は、ピックオフ510bからアナログ/デジタル変換器532に直接提供することができる。アナログ/デジタル変換器532は、サンプリングされた振動信号を生成する
サンプリングレート及び分解能を以て、連続時間信号であり得る振動信号をサンプリングする。
アナログ/デジタル変換器532は、サンプリングの前に振動信号から望ましくない周
波数成分を取り除く、アンチエイリアシング(anti-aliasing)フィルタを含む。
成された駆動信号をサンプリングする。あらゆる適切な信号も提供されるが、駆動利得部550から生成された駆動信号は連続時間信号になる。振動信号と同様に、アナログ/デ
ジタル変換器532は、適切なサンプリングレート及び分解能を以て、生成された駆動信号をサンプリングすることができる。アナログ/デジタル変換器532はまた、サンプリ
ングの前に、生成された駆動信号からあらゆる望ましくない周波数成分を取り除く、アン
チエイリアシングフィルタを含む。サンプリングされた振動信号及びサンプリングされた生成された駆動信号は、DSPブロック540中の位相検知器542に提供される。位相検
知器542は、下記に記載するように、サンプリングされた振動信号をサンプリングされた生成された駆動信号と比較して、測定された位相差φmを決定する。
し、生成する1以上のコード又はプログラムが、圧縮化(decimation)及び他のDSP機能に
加えて、変換を実行して、測定された位相差φmを決定する。
生成された駆動信号及び振動信号は、次の方程式[1]及び[2]によって複素平面中で表わされる。
着する。
された駆動信号と振動信号の間の測定された位相差φmは、
前記では、如何に測定された位相差φmが決定されるかを示す典型的な実施形態が示さ
れる。理解されるように、異なる実施形態の位相検知器542は、サンプリングされた振動信号及びサンプリングされた生成された駆動信号の間の測定された位相差φmを決定す
ることが出来る。図6について以下により詳細に説明されるように、測定された位相差φmはコマンド周波数ωを決定するのに用いられる。また、図5を参照してコマンド周波数
ωは駆動シンセサイザ544に付与される。
ωを受信して合成された駆動信号を付与するプロセッサである。合成された駆動信号は単純な正弦波信号の離散的表現になり得る。例えば、合成された駆動信号は、単純な正弦波信号に相当するエンベロープを備えたインパルス列になり得る。更に又は或いは、駆動シンセサイザ544は、デジタル回路、フィールドプログラマブルゲートアレイなど(FPGA)であり得る。
例えば、デジタル回路は、コマンド周波数ωに相当する振幅を備えた直流(DC)電圧信号を受け取る。代替の実施形態では、駆動シンセサイザは電圧信号(例えば直流など)を受け取り、生成された駆動信号に電圧信号に比例するコマンド周波数ωを供給する。
合成された駆動信号を供給する。デジタル/アナログ変換器534は合成された駆動信号
を生成された駆動信号に変換する。あらゆる適切なデジタル/アナログ変換器534も使
用され得るが、デジタル/アナログ変換器534は、例えば、インパルス列を階段状の正
弦波波形に変換するゼロ次ホールドであり得る。駆動シンセサイザ544が以前に記載されたデジタル回路かFPGAであるような代替の実施形態の場合、デジタル/アナログ変換器
534は必要ではない。そのような実施形態では、生成された駆動信号は、デジタル/ア
ナログ変換なしで提供することができる。これら及び他の実施形態では、生成された駆動信号は、コマンド周波数ωの、あるいはω周りの単純な正弦波信号になり得る。代替の実施形態では、生成された駆動信号は、1以上の周波数成分で構成されることができる。示された実施形態では、生成された駆動信号は、駆動利得部550に送られる。
び駆動ステージ560に増幅された生成された駆動信号を供給する。駆動利得部550及び駆動ステージ560は、所望の波形を達成するように、生成された駆動信号を修正することができる。例えば、駆動利得部550は、ドライバ510aに利用可能な電力を超え
るように、生成された駆動信号を増幅することができる。従って、生成された駆動信号が時間が連続した正弦波信号である実施形態にて、ドライバ510aに供給される、生成さ
れた駆動信号は台形形状を有する。更に又は或いは、生成された駆動信号には三角形波形、異なる波形の一続きのような他の形を有する。
これら及び他の波形は、下記により詳細に説明されるように、測定された位相差φmから決定されたコマンド周波数を用いて形成され得る。
の生成された駆動信号も、アナログ/デジタル変換器147a、532に送信される。
7a、532によってサンプリングされる。サンプリングは、振動信号及び生成された駆
動信号を数列に変換するあらゆる適切なサンプリング方法であり、例えばバイナリフォーマットである。サンプリングはあらゆる適切なサンプリングレート及びビット分解能でも行うことができる。
ステップ630で、サンプリングされた振動信号の位相及びサンプリングされた生成された駆動信号の位相の間の測定された位相差φmは、位相検知器147bによって決定される。測定された位相差φmは度の単位を有する角度であるが、ラジアンのような他の単位
も他の実施形態にて用いられる。或いは、位相差ではなく時間差が用いられる。
の実施形態にて、目標位相差φtは45°である。比較結果が測定された位相差φmが目
標位相差φtと同じであることを示せば、方法600はステップ660にてコマンド周波数ω又は最初の周波数ω0と同じ駆動信号を生成し続ける。測定された位相差φmが目標
位相差φtと同じでなければ、ステップ650にてコマンド周波数ωが決定される。
、上記に記載の実施形態にて、測定された位相差φmが目標位相差φtよりも小さければ
、コマンド周波数ωが増加される。しかし、代替の実施形態において、コマンド周波数ωは代替の手段を用いて測定された位相差φmから決定される。これらの又は他の実施形態
において、コマンド周波数ωはステップ660にて駆動信号を生成するのに用いられる。
成する。実施形態では、信号生成器147cは、駆動シンセサイザ544及びデジタル/アナログ変換器534から構成される。或いは、信号生成器147cはデジタル回路、FPGA
などで構成される。図5に関して記載された実施形態では、生成された駆動信号は、駆動シンセサイザ544によって提供された駆動信号から合成される。これら及び他の実施形態では、他の適切な信号も提供され得るが、生成された駆動信号は単一の周波数を備えた正弦波の駆動信号になる。
要素104、510に提供することができる。例えば、生成された駆動信号は、ドライバ510aに直接提供することができる。生成された駆動信号もサンプリングされ、測定さ
れる。例えば、図6に示すように、ステップ660はまた、生成された駆動信号がサンプリングされるステップ620に生成された駆動信号を返す。
相差φtに達する。目標位相差φtは流体密度を正確に測定すべく、45°である。しかし、代替の実施形態では、目標位相差φtは他の値である。
。
実施形態では、信号生成器147cは駆動シンセサイザ544及びデジタル/アナログ変換器534で構成される。コマンド周波数ωは、振動信号と生成された駆動信号の間の測定された位相差φmから決定される。測定された位相差φmは位相検知器147b、542を
使用して決定される。
する。従って、振動信号と生成された駆動信号の間の測定された位相差φmは、従来技術
の振動計に関する遅延が無く決定される。更に、信号生成器147cは振動信号に関する
ノイズ無しで生成された駆動信号を付与する。例えば、前記の実施形態に記載した如く、測定された位相差φmを決定する前に、位相検知器542はサンプリングされた振動信号
及び生成された駆動信号の周波数成分を除去する。
従って、特定の実施形態が説明の目的のためにここに記述されているが、当業者が認識するように、様々な等価な修正は現在の記述の範囲内で可能である。ここに提供される開示は、振動式センサの駆動信号を生成する他の方法に適用可能であり、上記に記載され添付の図面に示された実施形態だけではない。従って、上記の実施形態の範囲は、添付の特許請求の範囲から決定されるべきである。
Claims (18)
- 振動式センサ(5)の駆動信号を生成する方法(600)であって、
振動信号を付与するように構成された振動要素(104、510)を振動させる工程と、受信回路(134)を用いて前記振動要素(104、510)から振動信号を受信する工程と、
前記受信回路(134)及び前記振動要素(104、510)に連結された駆動回路(138)を用いて、前記振動要素(104、510)を振動させる駆動信号を生成する工程と、
生成された駆動信号の位相を振動信号の位相と比較する工程を備える、方法(600)。 - 前記生成された駆動信号の位相を振動信号の位相と比較する工程は、生成された駆動信号のサンプルを振動信号のサンプルと比較する工程を備える、請求項1に記載の方法(6
00)。 - 更に、生成された駆動信号のサンプルと振動信号のサンプルの少なくとも1つから、少なくとも1つの周波数成分を除去する工程を備える、請求項2に記載の方法(600)。
- 前記生成された駆動信号のサンプルを振動信号のサンプルと比較する工程は、生成された駆動信号のサンプルと振動信号のサンプルの相関付けを実行する工程を備える、請求項2に記載の方法(600)。
- 前記生成された駆動信号のサンプルを振動信号のサンプルと比較する工程は、
生成された駆動信号のサンプルの1つを振動信号のサンプルに接合する工程と、
該接合された1つの生成された駆動信号のサンプル及び振動信号のサンプルを、接合されない1つの生成された駆動信号のサンプル及び振動信号のサンプルと掛け合わせる工程を備える、請求項2に記載の方法(600)。 - 前記生成された駆動信号の位相を振動信号の位相と比較する工程は、
生成された駆動信号の位相と振動信号の位相間の測定された位相差φmを決定する工程、及び
測定された位相差φmを目標位相差φtと比較し、測定された位相差φmが目標位相差φtにあるかを決定する工程を備える、請求項1に記載の方法(600)。 - 更に、前記測定された位相差φmが目標位相差φtにあるときは、流体密度を測定する工程を備える、請求項6に記載の方法(600)。
- 更に、生成された駆動信号の位相と振動信号の位相の比較から、コマンド周波数ωを決定する工程と、
信号生成器(147c)にコマンド周波数を供給する工程と、
該信号生成器(147c)を用いてコマンド周波数ωにて駆動信号を生成する工程を備え
る、請求項1に記載の方法(600)。 - 前記信号生成器(147c)を用いてコマンド周波数ωにて駆動信号を生成する工程は、
駆動シンセサイザ(544)を用いて合成された駆動信号を形成する工程と、
デジタル/アナログコンバータ(534)を用いて合成された駆動信号を生成された駆動
信号に変換する工程を含む、請求項8に記載の方法(600)。 - 振動信号を付与するように構成された振動要素(104、510)と、
該振動要素(104)から振動信号を受信する受信回路(134)と、
前記受信回路(134)及び振動要素(104)に連結された駆動回路(138)を備え、
該駆動回路(138)は振動要素(104、510)を振動させる駆動信号を生成し、且つ生成された駆動信号の位相と振動信号の位相とを比較するように構成されている、振動式センサ(5)。 - 前記駆動回路(138)は、生成された駆動信号のサンプルと振動信号のサンプルを比較するように構成されている、請求項10に記載の振動式センサ(5)。
- 前記駆動回路(138)は更に、生成された駆動信号のサンプルと振動信号のサンプルの少なくとも1つから、少なくとも1つの周波数成分を除去するように構成される、請求項11に記載の振動式センサ(5)。
- 前記駆動回路(138)は更に、生成された駆動信号のサンプルと振動信号のサンプルの相関付けを実行するように構成されている、請求項11に記載の振動式センサ(5)。
- 前記駆動回路(138)は更に、生成された駆動信号のサンプルの1つを振動信号のサンプルに接合する工程と、
該接合された1つの生成された駆動信号のサンプル及び振動信号のサンプルを、接合されない1つの生成された駆動信号のサンプル及び振動信号のサンプルと掛け合わせるように構成されている、請求項11に記載の振動式センサ(5)。 - 前記駆動回路(138)は、生成された駆動信号の位相と振動信号の位相間の測定された位相差φmを決定し、
測定された位相差φmを目標位相差φtと比較し、測定された位相差φmが目標位相差φtにあるかを決定するように構成されている、請求項10に記載の振動式センサ(5)。 - 前記駆動回路(138)は更に、測定された位相差φmが目標位相差φtにあるときは、流体の密度を測定するように構成されている、請求項15に記載の振動式センサ(5)。
- 前記駆動回路(138)は、位相検知器(147b、542)と信号生成器(147c)を備え、
該位相検知器(147b)は、生成された駆動信号の位相及び振動信号の位相の比較から
コマンド周波数ωを決定し、該コマンド周波数ωを信号生成器(147c)に供給するよう
に構成され、
前記信号生成器(147c)はコマンド周波数ωにて駆動信号を生成するように構成され
ている、請求項10に記載の振動式センサ(5)。 - 前記信号生成器(147c)は、合成された駆動信号を形成するように構成された駆動シ
ンセサイザ(544)と、合成された駆動信号を生成された駆動信号に変換するように構成されたデジタル/アナログコンバータ(534)を備える、請求項17に記載の振動式セン
サ(5)。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361815139P | 2013-04-23 | 2013-04-23 | |
| US61/815,139 | 2013-04-23 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016510709A Division JP2016518606A (ja) | 2013-04-23 | 2014-04-18 | 振動式センサ用に駆動信号を生成する方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019149405A Division JP7186678B2 (ja) | 2013-04-23 | 2019-08-16 | 振動式センサ用に駆動信号を生成する方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017201325A true JP2017201325A (ja) | 2017-11-09 |
Family
ID=50792575
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016510709A Pending JP2016518606A (ja) | 2013-04-23 | 2014-04-18 | 振動式センサ用に駆動信号を生成する方法 |
| JP2017135247A Pending JP2017201325A (ja) | 2013-04-23 | 2017-07-11 | 振動式センサ用に駆動信号を生成する方法 |
| JP2019149405A Active JP7186678B2 (ja) | 2013-04-23 | 2019-08-16 | 振動式センサ用に駆動信号を生成する方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016510709A Pending JP2016518606A (ja) | 2013-04-23 | 2014-04-18 | 振動式センサ用に駆動信号を生成する方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019149405A Active JP7186678B2 (ja) | 2013-04-23 | 2019-08-16 | 振動式センサ用に駆動信号を生成する方法 |
Country Status (13)
| Country | Link |
|---|---|
| US (1) | US10168264B2 (ja) |
| EP (1) | EP2989438A1 (ja) |
| JP (3) | JP2016518606A (ja) |
| KR (2) | KR20160002956A (ja) |
| CN (1) | CN105308432B (ja) |
| AR (1) | AR096060A1 (ja) |
| AU (1) | AU2014257366B2 (ja) |
| BR (1) | BR112015026826B1 (ja) |
| CA (1) | CA2908061C (ja) |
| MX (1) | MX363907B (ja) |
| RU (1) | RU2646541C2 (ja) |
| SG (1) | SG11201508581VA (ja) |
| WO (1) | WO2014176122A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10663386B2 (en) * | 2014-12-19 | 2020-05-26 | Micro Motion, Inc. | Controlling a vibration of a vibratory sensor based on a phase error |
| WO2017039732A1 (en) * | 2015-08-28 | 2017-03-09 | Micro Motion, Inc. | Method for generating a synthetic time period output signal |
| DE102016111134A1 (de) | 2016-06-17 | 2017-12-21 | Endress+Hauser Gmbh+Co. Kg | Vibronischer Sensor |
| DE102016114860A1 (de) * | 2016-08-10 | 2018-02-15 | Endress + Hauser Flowtec Ag | Treiberschaltung sowie damit gebildete Umformer-Elektronik bzw. damit gebildetes Meßsystem |
| CN107676079B (zh) * | 2017-11-14 | 2020-08-14 | 北京盛锐马科技有限公司 | 微小型高集成剪切式泥浆脉冲器控制系统 |
| US20210041335A1 (en) * | 2018-02-23 | 2021-02-11 | Micro Motion, Inc. | Dissolution monitoring method and apparatus |
| US20220011209A1 (en) * | 2018-12-12 | 2022-01-13 | Micro Motion, Inc. | Planar vibratory densitometer, densitometer member, and related method |
| US11626003B2 (en) * | 2021-02-23 | 2023-04-11 | Rheem Manufacturing Company | Systems and methods for monitoring and detecting a fault in a fluid storage tank |
| DE102022115592A1 (de) * | 2022-06-22 | 2023-12-28 | Endress+Hauser SE+Co. KG | Modularer vibronischer Multisensor |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004511771A (ja) * | 2000-10-10 | 2004-04-15 | エンドレス ウント ハウザー ゲゼルシヤフト ミツト ベシユレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 容器内の媒体の粘度を測定及び/又は監視する装置 |
| JP2008536111A (ja) * | 2005-03-29 | 2008-09-04 | マイクロ・モーション・インコーポレーテッド | コリオリ流量計、及び、流れ特性を決定するための方法 |
| JP2009509167A (ja) * | 2005-09-20 | 2009-03-05 | マイクロ・モーション・インコーポレーテッド | 振動流量計のための駆動信号を生成する計器電子機器及び方法 |
| JP2009511934A (ja) * | 2005-10-18 | 2009-03-19 | マイクロ・モーション・インコーポレーテッド | 流量計の第1のセンサ信号と第2のセンサ信号との間の位相差を決定するための計器電子装置及び方法 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1521467A (en) | 1974-09-21 | 1978-08-16 | Solartron Electronic Group | Density transducer |
| DE8712331U1 (de) | 1986-09-26 | 1988-01-28 | Flowtec AG, Reinach, Basel | Corioliskraft-Massendurchflussmesser |
| US4738144A (en) | 1986-10-03 | 1988-04-19 | Micro Motion, Inc. | Drive means for oscillating flow tubes of parallel path coriolis mass flow rate meter |
| JPS63241449A (ja) * | 1987-03-30 | 1988-10-06 | Fuji Electric Co Ltd | 振動式トランスジユ−サ |
| US4841256A (en) * | 1987-10-20 | 1989-06-20 | Pennwalt Corporation | Piezoelectric phase locked loop circuit |
| US4965532A (en) | 1988-06-17 | 1990-10-23 | Olympus Optical Co., Ltd. | Circuit for driving ultrasonic transducer |
| GB2236591B (en) * | 1989-10-05 | 1993-10-06 | Marconi Gec Ltd | Sensor apparatus |
| US5613009A (en) * | 1992-12-16 | 1997-03-18 | Bridgestone Corporation | Method and apparatus for controlling vibration |
| US5895848A (en) | 1996-01-16 | 1999-04-20 | Flowline Inc. | Apparatus and method for level sensing in a container |
| US6199022B1 (en) * | 1997-07-11 | 2001-03-06 | Micro Motion, Inc. | Drive circuit modal filter for a vibrating tube flowmeter |
| US6505131B1 (en) * | 1999-06-28 | 2003-01-07 | Micro Motion, Inc. | Multi-rate digital signal processor for signals from pick-offs on a vibrating conduit |
| US6711942B2 (en) | 2000-10-10 | 2004-03-30 | Endress + Hauser Gmbh & Co. Kg | Apparatus for determining and/or monitoring the viscosity of a medium in a container |
| JP4770043B2 (ja) * | 2001-03-27 | 2011-09-07 | セイコーエプソン株式会社 | 圧電アクチュエータの駆動装置、圧電アクチュエータの駆動方法、時計および携帯機器 |
| US20040173031A1 (en) | 2003-03-06 | 2004-09-09 | Shlomo Gicza | Mass flow measurement |
| CN1906843B (zh) * | 2004-03-17 | 2010-09-29 | 精工爱普生株式会社 | 压电致动器驱动装置、电子设备、其驱动方法 |
| DE102005015547A1 (de) | 2005-04-04 | 2006-10-05 | Endress + Hauser Gmbh + Co. Kg | Vorrichtung zur Bestimmung und/oder Überwachung einer Prozessgröße eines Mediums |
| DE102006033819A1 (de) | 2006-07-19 | 2008-01-24 | Endress + Hauser Gmbh + Co. Kg | Vorrichtung zur Bestimmung und/oder Überwachung einer Prozessgröße eines Mediums |
| DE102006034105A1 (de) * | 2006-07-20 | 2008-01-24 | Endress + Hauser Gmbh + Co. Kg | Vorrichtung zur Bestimmung und/oder Überwachung einer Prozessgröße eines Mediums |
| JP4893170B2 (ja) * | 2006-09-01 | 2012-03-07 | パナソニック株式会社 | 密度センサ |
| DE102007008669A1 (de) * | 2007-02-20 | 2008-08-21 | Endress + Hauser Gmbh + Co. Kg | Verfahren zur Bestimmung und/oder Überwachung einer Prozessgröße eines Mediums und entsprechende Vorrichtung |
| JP4436884B1 (ja) | 2009-02-06 | 2010-03-24 | 株式会社オーバル | 信号処理方法、信号処理装置、およびコリオリ流量計 |
| US8798950B2 (en) * | 2010-08-20 | 2014-08-05 | Bio-Rad Laboratories, Inc. | System and method for ultrasonic transducer control |
| CA2840181C (en) * | 2011-07-13 | 2017-01-24 | Micro Motion, Inc. | Vibratory meter and method for determining resonant frequency |
| CN102506951B (zh) | 2011-10-28 | 2013-05-01 | 合肥工业大学 | 一种科氏质量流量计的数字驱动跟踪方法和系统 |
-
2014
- 2014-04-18 SG SG11201508581VA patent/SG11201508581VA/en unknown
- 2014-04-18 AU AU2014257366A patent/AU2014257366B2/en active Active
- 2014-04-18 KR KR1020157032923A patent/KR20160002956A/ko not_active Ceased
- 2014-04-18 CN CN201480023211.5A patent/CN105308432B/zh active Active
- 2014-04-18 KR KR1020187001740A patent/KR102002126B1/ko active Active
- 2014-04-18 EP EP14726277.8A patent/EP2989438A1/en not_active Ceased
- 2014-04-18 CA CA2908061A patent/CA2908061C/en active Active
- 2014-04-18 BR BR112015026826-9A patent/BR112015026826B1/pt active IP Right Grant
- 2014-04-18 JP JP2016510709A patent/JP2016518606A/ja active Pending
- 2014-04-18 RU RU2015149663A patent/RU2646541C2/ru active
- 2014-04-18 MX MX2015014051A patent/MX363907B/es active IP Right Grant
- 2014-04-18 US US14/781,259 patent/US10168264B2/en active Active
- 2014-04-18 WO PCT/US2014/034610 patent/WO2014176122A1/en not_active Ceased
- 2014-04-22 AR ARP140101674A patent/AR096060A1/es active IP Right Grant
-
2017
- 2017-07-11 JP JP2017135247A patent/JP2017201325A/ja active Pending
-
2019
- 2019-08-16 JP JP2019149405A patent/JP7186678B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004511771A (ja) * | 2000-10-10 | 2004-04-15 | エンドレス ウント ハウザー ゲゼルシヤフト ミツト ベシユレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 容器内の媒体の粘度を測定及び/又は監視する装置 |
| JP2008536111A (ja) * | 2005-03-29 | 2008-09-04 | マイクロ・モーション・インコーポレーテッド | コリオリ流量計、及び、流れ特性を決定するための方法 |
| JP2009509167A (ja) * | 2005-09-20 | 2009-03-05 | マイクロ・モーション・インコーポレーテッド | 振動流量計のための駆動信号を生成する計器電子機器及び方法 |
| JP2009511934A (ja) * | 2005-10-18 | 2009-03-19 | マイクロ・モーション・インコーポレーテッド | 流量計の第1のセンサ信号と第2のセンサ信号との間の位相差を決定するための計器電子装置及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160054212A1 (en) | 2016-02-25 |
| US10168264B2 (en) | 2019-01-01 |
| CN105308432A (zh) | 2016-02-03 |
| JP2016518606A (ja) | 2016-06-23 |
| RU2015149663A (ru) | 2017-05-26 |
| BR112015026826A2 (pt) | 2017-07-25 |
| KR102002126B1 (ko) | 2019-07-19 |
| KR20180009396A (ko) | 2018-01-26 |
| JP7186678B2 (ja) | 2022-12-09 |
| HK1221016A1 (zh) | 2017-05-19 |
| JP2019215365A (ja) | 2019-12-19 |
| KR20160002956A (ko) | 2016-01-08 |
| AU2014257366B2 (en) | 2016-10-13 |
| CA2908061A1 (en) | 2014-10-30 |
| MX363907B (es) | 2019-04-08 |
| RU2646541C2 (ru) | 2018-03-05 |
| CA2908061C (en) | 2020-11-24 |
| MX2015014051A (es) | 2016-02-10 |
| EP2989438A1 (en) | 2016-03-02 |
| AU2014257366A1 (en) | 2015-11-05 |
| WO2014176122A1 (en) | 2014-10-30 |
| AR096060A1 (es) | 2015-12-02 |
| CN105308432B (zh) | 2019-01-08 |
| SG11201508581VA (en) | 2015-11-27 |
| BR112015026826B1 (pt) | 2020-11-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7186678B2 (ja) | 振動式センサ用に駆動信号を生成する方法 | |
| EP3234546B1 (en) | Controlling a vibration of a vibratory sensor based on a phase error | |
| US10527534B2 (en) | Determining a vibration response parameter of a vibratory element | |
| JP2020204621A (ja) | 合成期間出力信号を生成する方法 | |
| JP2018531373A6 (ja) | 合成期間出力信号を生成する方法 | |
| HK1221016B (zh) | 生成用於振动传感器的驱动信号的方法 | |
| HK1243172B (zh) | 基於相位误差控制振动传感器的振动 | |
| HK1253836B (zh) | 用於生成合成时间段输出信号的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170712 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170809 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180605 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181101 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190423 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190816 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20190816 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20190823 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20190827 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20191011 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20191023 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200128 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200414 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20200728 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20200901 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20200901 |