JP2017203692A - 物理量センサーの製造方法および振動素子の周波数調整方法 - Google Patents
物理量センサーの製造方法および振動素子の周波数調整方法 Download PDFInfo
- Publication number
- JP2017203692A JP2017203692A JP2016095446A JP2016095446A JP2017203692A JP 2017203692 A JP2017203692 A JP 2017203692A JP 2016095446 A JP2016095446 A JP 2016095446A JP 2016095446 A JP2016095446 A JP 2016095446A JP 2017203692 A JP2017203692 A JP 2017203692A
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- frequency
- vibrating
- resonance frequency
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 50
- 238000004519 manufacturing process Methods 0.000 title claims abstract description 37
- 238000005259 measurement Methods 0.000 claims abstract description 39
- 238000001514 detection method Methods 0.000 claims description 130
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 17
- 239000000758 substrate Substances 0.000 description 15
- 239000010453 quartz Substances 0.000 description 13
- 239000000463 material Substances 0.000 description 10
- 229910052751 metal Inorganic materials 0.000 description 9
- 239000002184 metal Substances 0.000 description 9
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 8
- 239000010931 gold Substances 0.000 description 7
- 239000011651 chromium Substances 0.000 description 6
- 150000002484 inorganic compounds Chemical class 0.000 description 6
- 229910010272 inorganic material Inorganic materials 0.000 description 6
- 239000012528 membrane Substances 0.000 description 6
- 239000000470 constituent Substances 0.000 description 5
- 239000010949 copper Substances 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 4
- 230000001070 adhesive effect Effects 0.000 description 4
- 239000000919 ceramic Substances 0.000 description 4
- 239000013078 crystal Substances 0.000 description 4
- 238000003754 machining Methods 0.000 description 4
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 4
- 229910052804 chromium Inorganic materials 0.000 description 3
- 229910052802 copper Inorganic materials 0.000 description 3
- 238000005530 etching Methods 0.000 description 3
- 229910052737 gold Inorganic materials 0.000 description 3
- 239000007769 metal material Substances 0.000 description 3
- 229910052759 nickel Inorganic materials 0.000 description 3
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 3
- 229910052709 silver Inorganic materials 0.000 description 3
- 238000007740 vapor deposition Methods 0.000 description 3
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 2
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 2
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 2
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 239000010955 niobium Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 229920002120 photoresistant polymer Polymers 0.000 description 2
- 238000001020 plasma etching Methods 0.000 description 2
- 229910052697 platinum Inorganic materials 0.000 description 2
- 229910052814 silicon oxide Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- 238000004544 sputter deposition Methods 0.000 description 2
- 239000010936 titanium Substances 0.000 description 2
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 239000010937 tungsten Substances 0.000 description 2
- 229910001316 Ag alloy Inorganic materials 0.000 description 1
- 229910018072 Al 2 O 3 Inorganic materials 0.000 description 1
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 229910001020 Au alloy Inorganic materials 0.000 description 1
- 229910052582 BN Inorganic materials 0.000 description 1
- PZNSFCLAULLKQX-UHFFFAOYSA-N Boron nitride Chemical compound N#B PZNSFCLAULLKQX-UHFFFAOYSA-N 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 229910000599 Cr alloy Inorganic materials 0.000 description 1
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 1
- 229910052581 Si3N4 Inorganic materials 0.000 description 1
- 229910004298 SiO 2 Inorganic materials 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- NRTOMJZYCJJWKI-UHFFFAOYSA-N Titanium nitride Chemical compound [Ti]#N NRTOMJZYCJJWKI-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000005219 brazing Methods 0.000 description 1
- 239000001506 calcium phosphate Substances 0.000 description 1
- 229910000389 calcium phosphate Inorganic materials 0.000 description 1
- 235000011010 calcium phosphates Nutrition 0.000 description 1
- 239000000788 chromium alloy Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- PMHQVHHXPFUNSP-UHFFFAOYSA-M copper(1+);methylsulfanylmethane;bromide Chemical compound Br[Cu].CSC PMHQVHHXPFUNSP-UHFFFAOYSA-M 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 239000003353 gold alloy Substances 0.000 description 1
- 229910002804 graphite Inorganic materials 0.000 description 1
- 239000010439 graphite Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000001307 helium Substances 0.000 description 1
- 229910052734 helium Inorganic materials 0.000 description 1
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 229910000833 kovar Inorganic materials 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000002844 melting Methods 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 239000011733 molybdenum Substances 0.000 description 1
- 229910052758 niobium Inorganic materials 0.000 description 1
- GUCVJGMIXFAOAE-UHFFFAOYSA-N niobium atom Chemical compound [Nb] GUCVJGMIXFAOAE-UHFFFAOYSA-N 0.000 description 1
- 150000004767 nitrides Chemical class 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 229910052574 oxide ceramic Inorganic materials 0.000 description 1
- 239000011224 oxide ceramic Substances 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- VSZWPYCFIRKVQL-UHFFFAOYSA-N selanylidenegallium;selenium Chemical compound [Se].[Se]=[Ga].[Se]=[Ga] VSZWPYCFIRKVQL-UHFFFAOYSA-N 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 1
- 239000010944 silver (metal) Substances 0.000 description 1
- VEALVRVVWBQVSL-UHFFFAOYSA-N strontium titanate Chemical compound [Sr+2].[O-][Ti]([O-])=O VEALVRVVWBQVSL-UHFFFAOYSA-N 0.000 description 1
- JBQYATWDVHIOAR-UHFFFAOYSA-N tellanylidenegermanium Chemical compound [Te]=[Ge] JBQYATWDVHIOAR-UHFFFAOYSA-N 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- OGIDPMRJRNCKJF-UHFFFAOYSA-N titanium oxide Inorganic materials [Ti]=O OGIDPMRJRNCKJF-UHFFFAOYSA-N 0.000 description 1
- QORWJWZARLRLPR-UHFFFAOYSA-H tricalcium bis(phosphate) Chemical compound [Ca+2].[Ca+2].[Ca+2].[O-]P([O-])([O-])=O.[O-]P([O-])([O-])=O QORWJWZARLRLPR-UHFFFAOYSA-H 0.000 description 1
- UONOETXJSWQNOL-UHFFFAOYSA-N tungsten carbide Chemical compound [W+]#[C-] UONOETXJSWQNOL-UHFFFAOYSA-N 0.000 description 1
- RUDFQVOCFDJEEF-UHFFFAOYSA-N yttrium(III) oxide Inorganic materials [O-2].[O-2].[O-2].[Y+3].[Y+3] RUDFQVOCFDJEEF-UHFFFAOYSA-N 0.000 description 1
Images







Landscapes
- Gyroscopes (AREA)
Abstract
【課題】2つの振動腕を有する振動素子の素子ごとの特性のバラツキを低減することができる物理量センサーの製造方法および振動素子の周波数調整方法を提供すること。
【解決手段】第1振動部および第2振動部を有する振動素子を形成する振動素子形成工程と、前記第1振動部および前記第2振動部のそれぞれの共振周波数を測定する周波数測定工程と、前記周波数測定工程の結果に基づいて、前記第2振動部の共振周波数を目標値まで調整するときの前記第1振動部の共振周波数の変動量を予測変動量として求め、前記予測変動量および前記周波数測定工程において測定した前記第1振動部の共振周波数に基づいて、前記第1振動部の共振周波数を調整する第1周波数調整工程と、前記第2振動部の共振周波数を調整する第2周波数調整工程と、を有することを特徴とする物理量センサーの製造方法。
【選択図】図3
【解決手段】第1振動部および第2振動部を有する振動素子を形成する振動素子形成工程と、前記第1振動部および前記第2振動部のそれぞれの共振周波数を測定する周波数測定工程と、前記周波数測定工程の結果に基づいて、前記第2振動部の共振周波数を目標値まで調整するときの前記第1振動部の共振周波数の変動量を予測変動量として求め、前記予測変動量および前記周波数測定工程において測定した前記第1振動部の共振周波数に基づいて、前記第1振動部の共振周波数を調整する第1周波数調整工程と、前記第2振動部の共振周波数を調整する第2周波数調整工程と、を有することを特徴とする物理量センサーの製造方法。
【選択図】図3
Description
本発明は、物理量センサーの製造方法および振動素子の周波数調整方法に関するものである。
物理量センサーとしては、例えば、車両における車体制御、カーナビゲーションシステムの自車位置検出、デジタルカメラやビデオカメラ等の振動制御補正(いわゆる手ぶれ補正)等に用いられ、角速度、加速度等の物理量を検出するセンサーが知られている(例えば、特許文献1参照)。
例えば、特許文献1に記載の振動ジャイロセンサーは、基部と、基部から延出された連結アームと、連結アームの先端部から延出された駆動アームと、基部から延出された検出アームとを備える。このような振動ジャイロセンサーは、駆動アームを屈曲振動させた状態で、所定方向の角速度を受けると、駆動アームにコリオリ力が作用し、それに伴って、検出アームが屈曲振動する。このような検出アームの屈曲振動を検出することにより、角速度を検出することができる。
また、特許文献1に記載の振動ジャイロセンサーでは、駆動アームおよび検出アームの先端部にそれぞれ金属で構成された錘層が設けられている。そして、この錘層の一部を必要に応じてレーザー光の照射により除去することにより、駆動アームおよび検出アームの共振周波数(固有振動数)の調整を行う。より具体的には、検出アームの共振周波数を調整することで、検出アームの共振周波数と駆動アームの共振周波数との差である離調周波数を調整した後、複数の駆動アームの共振周波数のアンバランスによって生じる駆動アームから基部への振動漏れを防止するため、駆動アームの共振周波数を調整する。
特許文献1に記載の振動ジャイロセンサーにおいて、駆動アームおよび検出アームは、基部を介して互いに接続されているため、完全には独立した振動系ではない。そのため、駆動アームの共振周波数を調整したときに、その調整に伴って検出アームの共振周波数も変動してしまう。特許文献1に記載の共振周波数の調整方法では、このような変動を考慮していないため、検出アームの共振周波数を調整しても、素子ごとの駆動アームの共振周波数の調整量のバラつきによって、駆動アームの共振周波数の調整後の検出アームの共振周波数が素子ごとにバラつき、それに伴って、離調周波数も素子ごとにバラついてしまうという問題がある。
本発明の目的は、2つの振動腕を有する振動素子の素子ごとの特性のバラツキを低減することができる物理量センサーの製造方法および振動素子の周波数調整方法を提供することにある。
上記目的は、下記の本発明により達成される。
本発明の物理量センサーの製造方法は、第1振動部および第2振動部を有する振動素子を形成する振動素子形成工程と、
前記第1振動部および前記第2振動部のそれぞれの共振周波数を測定する周波数測定工程と、
前記周波数測定工程の結果に基づいて、前記第2振動部の共振周波数を目標値まで調整するときの前記第1振動部の共振周波数の変動量を予測変動量として求め、前記予測変動量および前記周波数測定工程において測定した前記第1振動部の共振周波数に基づいて、前記第1振動部の共振周波数を調整する第1周波数調整工程と、
前記第2振動部の共振周波数を調整する第2周波数調整工程と、を有することを特徴とする。
本発明の物理量センサーの製造方法は、第1振動部および第2振動部を有する振動素子を形成する振動素子形成工程と、
前記第1振動部および前記第2振動部のそれぞれの共振周波数を測定する周波数測定工程と、
前記周波数測定工程の結果に基づいて、前記第2振動部の共振周波数を目標値まで調整するときの前記第1振動部の共振周波数の変動量を予測変動量として求め、前記予測変動量および前記周波数測定工程において測定した前記第1振動部の共振周波数に基づいて、前記第1振動部の共振周波数を調整する第1周波数調整工程と、
前記第2振動部の共振周波数を調整する第2周波数調整工程と、を有することを特徴とする。
このような物理量センサーの製造方法によれば、第1周波数調整工程において、第2振動部の共振周波数をその目標値まで調整するときの第1振動部の共振周波数の変動量を予測し、予測した当該変動量を考慮して、第1振動部の共振周波数を調整するため、第2周波数調整工程において、第2振動部の共振周波数を調整するのに伴って、第1振動部の共振周波数を目標値に調整することができる。そのため、第1振動部および第2振動部の共振周波数をそれぞれの目標値に高精度に調整し、それに伴って、第1振動部の共振周波数と第2振動部の共振周波数との差である離調周波数もその目標値に高精度に調整することができる。よって、2つの振動腕(第1、第2振動部)を有する振動素子の素子ごとの特性のバラツキを低減することができる。
本発明の物理量センサーの製造方法では、前記第1周波数調整工程において、前記第2振動部の共振周波数を調整するときの調整量に対する前記第1振動部の共振周波数の変動量の関係式、前記周波数測定工程で測定された前記第2振動部の共振周波数、および、前記第2周波数調整工程における前記第2振動部の共振周波数の目標値を用いて、前記予測変動量を求めることが好ましい。
これにより、第2振動部の共振周波数をその目標値まで調整するときの第1振動部の共振周波数の変動量を簡単かつ高精度に求めることができる。
本発明の物理量センサーの製造方法では、前記関係式が1次式であり、
前記第1周波数調整工程において、前記関係式、および、前記周波数測定工程で測定された前記第2振動部の共振周波数と前記第2周波数調整工程における前記第2振動部の共振周波数の目標値との差分を用いて、前記予測変動量を求めることが好ましい。
前記第1周波数調整工程において、前記関係式、および、前記周波数測定工程で測定された前記第2振動部の共振周波数と前記第2周波数調整工程における前記第2振動部の共振周波数の目標値との差分を用いて、前記予測変動量を求めることが好ましい。
これにより、第2振動部の共振周波数をその目標値まで調整するときの第1振動部の共振周波数の変動量をより簡単かつ高精度に求めることができる。
本発明の物理量センサーの製造方法では、前記第2振動部は、駆動信号に応じて駆動振動する駆動振動部であり、
前記第1振動部は、前記第2振動部に働くコリオリ力に応じて検出振動して検出信号を出力する検出振動部であることが好ましい。
前記第1振動部は、前記第2振動部に働くコリオリ力に応じて検出振動して検出信号を出力する検出振動部であることが好ましい。
これにより、周波数測定工程において、駆動信号のための配線を利用して第2振動部の共振周波数を測定するとともに、検出信号のための配線を利用して第1振動部の共振周波数を測定することができる。また、第1振動部である検出振動部の共振周波数の調整の後に、第2振動部である駆動振動部の共振周波数の調整を行うため、製品に近い実装状態で駆動振動部の共振周波数の調整を行うことができる。
本発明の物理量センサーの製造方法では、前記第1周波数調整工程と前記第2周波数調整工程との間に、前記第2振動部の振動漏れを低減させる調整を行う第1漏れ振動調整工程と、
前記第2周波数調整工程の後に、前記第2振動部の振動漏れを低減させる調整を行う第2漏れ振動調整工程と、を有し、
前記第2漏れ振動調整工程における前記第2振動部の共振周波数の変化量は、前記第1漏れ振動調整工程における前記第2振動部の共振周波数の変化量よりも小さいことが好ましい。
前記第2周波数調整工程の後に、前記第2振動部の振動漏れを低減させる調整を行う第2漏れ振動調整工程と、を有し、
前記第2漏れ振動調整工程における前記第2振動部の共振周波数の変化量は、前記第1漏れ振動調整工程における前記第2振動部の共振周波数の変化量よりも小さいことが好ましい。
これにより、得られる物理量センサーにおいて、第2振動部の漏れ振動を低減することができる。特に、第2振動部の漏れ振動を低減する工程を、第2周波数調整工程を挟んで第1漏れ振動調整工程および第2漏れ振動調整工程の2回に分け、第2漏れ振動調整工程における第2振動部の共振周波数の変化量を第1漏れ振動調整工程における第2振動部の共振周波数の変化量よりも小さくすることで、第2振動部の共振周波数の変動を低減しつつ、第2振動部の漏れ振動を効果的に低減することができる。
本発明の物理量センサーの製造方法では、前記第2周波数調整工程において、前記第2振動部の共振周波数の調整を複数回に分けて行うことが好ましい。
これにより、歩留まりよく、第2振動部の共振周波数を高精度に調整することができる。
本発明の物理量センサーの製造方法では、前記振動素子は、
基部と、
前記基部から互いに異なる方向に延出している第1検出振動腕および第2検出振動腕と、
前記基部から互いに異なる方向に延出している第1連結腕および第2連結腕と、
前記第1連結腕の先端部から互いに異なる方向に延出している第1駆動振動腕および第2駆動振動腕と、
前記第2連結腕の先端部から互いに異なる方向に延出している第3駆動振動腕および第4駆動振動腕と、を備え、
前記第1駆動振動腕には、第1錘膜が設けられ、
前記第2駆動振動腕には、第2錘膜が設けられ、
前記第3駆動振動腕には、第3錘膜が設けられ、
前記第4駆動振動腕には、第4錘膜が設けられ、
前記第1検出振動腕には、第5錘膜が設けられ、
前記第2検出振動腕には、第6錘膜が設けられ、
前記第1検出振動腕および前記第2検出振動腕が前記第1振動部であり、
前記第1駆動振動腕、前記第2駆動振動腕、前記第3駆動振動腕および前記第4駆動振動腕が前記第2振動部であり、
前記第1周波数調整工程において、前記第5錘膜および前記第6錘膜のうちの少なくとも一方の一部を除去することで、前記第1振動部の共振周波数を調整し、
前記第2周波数調整工程において、前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜のうちの少なくとも1つの一部を除去することで、前記第2振動部の共振周波数を調整することが好ましい。
基部と、
前記基部から互いに異なる方向に延出している第1検出振動腕および第2検出振動腕と、
前記基部から互いに異なる方向に延出している第1連結腕および第2連結腕と、
前記第1連結腕の先端部から互いに異なる方向に延出している第1駆動振動腕および第2駆動振動腕と、
前記第2連結腕の先端部から互いに異なる方向に延出している第3駆動振動腕および第4駆動振動腕と、を備え、
前記第1駆動振動腕には、第1錘膜が設けられ、
前記第2駆動振動腕には、第2錘膜が設けられ、
前記第3駆動振動腕には、第3錘膜が設けられ、
前記第4駆動振動腕には、第4錘膜が設けられ、
前記第1検出振動腕には、第5錘膜が設けられ、
前記第2検出振動腕には、第6錘膜が設けられ、
前記第1検出振動腕および前記第2検出振動腕が前記第1振動部であり、
前記第1駆動振動腕、前記第2駆動振動腕、前記第3駆動振動腕および前記第4駆動振動腕が前記第2振動部であり、
前記第1周波数調整工程において、前記第5錘膜および前記第6錘膜のうちの少なくとも一方の一部を除去することで、前記第1振動部の共振周波数を調整し、
前記第2周波数調整工程において、前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜のうちの少なくとも1つの一部を除去することで、前記第2振動部の共振周波数を調整することが好ましい。
これにより、いわゆるダブルT型の振動素子の駆動周波数、検出周波数および離調周波数の調整を簡単かつ高精度に行うことができる。
本発明の物理量センサーの製造方法では、前記第1周波数調整工程と前記第2周波数調整工程との間に、前記第2振動部の振動漏れを低減させるための調整を行う漏れ振動調整工程を有し、
前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜のそれぞれを2つの領域に分割して捉え、
前記漏れ振動調整工程において、前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜の少なくともいずれかの前記2つの領域のうちの一方の領域の少なくとも一部を除去し、
前記第2周波数調整工程において、前記2つの領域のうちの他方の領域の少なくとも一部を除去することが好ましい。
前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜のそれぞれを2つの領域に分割して捉え、
前記漏れ振動調整工程において、前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜の少なくともいずれかの前記2つの領域のうちの一方の領域の少なくとも一部を除去し、
前記第2周波数調整工程において、前記2つの領域のうちの他方の領域の少なくとも一部を除去することが好ましい。
これにより、第2周波数調整工程における錘膜の除去位置が漏れ振動調整工程における錘膜の除去位置の影響を受けるのを低減することができる。そのため、第2周波数調整工程における第2振動部の共振周波数の調整を簡単かつ高精度に行うことができる。
本発明の振動素子の周波数調整方法は、第1振動部および第2振動部を有する振動素子の周波数調整方法であって、
前記第1振動部および前記第2振動部のそれぞれの共振周波数を測定する周波数測定工程と、
前記周波数測定工程の結果に基づいて、前記第2振動部の共振周波数を目標値まで調整するときの前記第1振動部の共振周波数の変動量を予測変動量として求め、前記予測変動量および前記周波数測定工程において測定した前記第1振動部の共振周波数に基づいて、前記第1振動部の共振周波数を調整する第1周波数調整工程と、
前記第2振動部の共振周波数を調整する第2周波数調整工程と、を有することを特徴とする。
前記第1振動部および前記第2振動部のそれぞれの共振周波数を測定する周波数測定工程と、
前記周波数測定工程の結果に基づいて、前記第2振動部の共振周波数を目標値まで調整するときの前記第1振動部の共振周波数の変動量を予測変動量として求め、前記予測変動量および前記周波数測定工程において測定した前記第1振動部の共振周波数に基づいて、前記第1振動部の共振周波数を調整する第1周波数調整工程と、
前記第2振動部の共振周波数を調整する第2周波数調整工程と、を有することを特徴とする。
このような振動素子の周波数調整方法によれば、第1周波数調整工程において、第2振動部の共振周波数をその目標値まで調整するときの第1振動部の共振周波数の変動量を予測し、予測した当該変動量を考慮して、第1振動部の共振周波数を調整するため、第2周波数調整工程において、第2振動部の共振周波数を調整するのに伴って、第1振動部の共振周波数を目標値に調整することができる。そのため、第1振動部および第2振動部の共振周波数をそれぞれの目標値に高精度に調整し、それに伴って、第1振動部の共振周波数と第2振動部の共振周波数との差である離調周波数もその目標値に高精度に調整することができる。よって、2つの振動腕(第1、第2振動部)を有する振動素子の素子ごとの特性のバラツキを低減することができる。
以下、本発明の物理量センサーの製造方法および振動素子の周波数調整方法について、添付図面に示す好適実施形態に基づいて詳細に説明する。
1.物理量センサー
まず、本発明の物理量センサーの製造方法の説明に先立ち、本発明の物理量センサーの製造方法によって製造される物理量センサーについて簡単に説明する。
まず、本発明の物理量センサーの製造方法の説明に先立ち、本発明の物理量センサーの製造方法によって製造される物理量センサーについて簡単に説明する。
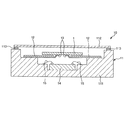
図1は、本発明の実施形態に係る物理量センサー(振動素子を実装した状態)を示す断面図である。
図1に示す物理量センサー10は、振動素子1(センサー素子)と、この振動素子1を収容するパッケージ11と、振動素子1をパッケージ11に対して支持している支持基板12および配線パターン13と、パッケージ11内に配置されている回路素子14と、を有している。
パッケージ11は、振動素子1を収納する凹部を有する箱状のベース111と、ベース111の凹部の開口を塞ぐようにベース111に接合部材113を介して接合された板状のリッド112と、を有する。パッケージ11内の空間は、減圧(真空)状態となっていてもよいし、窒素、ヘリウム、アルゴン等の不活性ガスが封入されていてもよい。
ベース111の凹部は、開口側に位置する上段面と、底部側に位置する下段面と、これらの面の間に位置する中段面と、を有する。このベース111の構成材料としては、特に限定されないが、酸化アルミニウム等の各種セラミックスや、各種ガラス材料を用いることができる。また、リッド112の構成材料としては、特に限定されないが、ベース111の構成材料と線膨張係数が近似する部材であると良い。例えば、ベース111の構成材料を前述のようなセラミックスとした場合には、コバール等の合金とするのが好ましい。なお、ベース111とリッド112の接合方法は、特に限定されず、例えば、接着材やろう材を介して接合することができる。本実施形態では、リッド112は、シームリング、低融点ガラス、接着剤等の接合部材113を介してベース111に接合されている。
ベース111の凹部の上段面および中段面には、それぞれ、複数の接続端子(図示せず)が設けられている。中段面に設けられている複数の接続端子のうち、一部は、ベース111に設けられた配線層(図示せず)を介して、ベース111の底面に設けられた端子(図示せず)に電気的に接続され、残部は、上段に設けられている複数の接続端子に配線(図示せず)を介して電気的に接続されている。これら接続端子は、導電性を有していれば特に限定されないが、例えば、Cr(クロム)、W(タングステン)等のメタライズ層(下地層)に、Ni(ニッケル)、Au(金)、Ag(銀)、Cu(銅)等の各被膜を積層した金属被膜で構成されている。
回路素子14は、ベース111の凹部の下段面に接着剤等によって固定されている。回路素子14は、図示しない複数の端子を有し、この各端子が導電性ワイヤー15によって、前述した中段面に設けられている各接続端子と電気的に接続されている。この回路素子14は、振動素子1を駆動振動させるための駆動回路と、角速度が加わったときに振動素子1に生じる検出振動を検出する検出回路と、を有する。
また、ベース111の凹部の中段面に設けられている複数の接続端子には、導電性接着剤(図示せず)を介して、配線パターン13が接続されている。この配線パターン13は、支持基板12に接合されている。
支持基板12は、中央部に開口を有しており、その開口内には、配線パターン13が有する複数の長尺状のリードが延びている。これらリードの先端部には、導電性のバンプ(図示せず)を介して振動素子1が接続されている。
なお、本実施形態では、回路素子14がパッケージ11の内部に設けられているが、回路素子14は、パッケージ11の外部に設けられていてもよい。
2.振動素子
図2は、図1に示す物理量センサーが備える振動素子(周波数調整前の振動素子)の平面図である。なお、図2では、説明の便宜上、互いに直交する3つの軸として、X軸、Y軸およびZ軸を図示しており、各軸を示す矢印の先端側を「+」、基端側を「−」とする。また、X軸に平行な方向を「X軸方向」、Y軸に平行な方向を「Y軸方向」、Z軸に平行な方向を「Z軸方向」という。また、+Z軸方向側を「上」、−Z軸方向側を「下」ともいう。また、本実施形態では、X軸、Y軸およびZ軸は、水晶の結晶軸である電気軸、機械軸および光軸にそれぞれ対応している。
図2は、図1に示す物理量センサーが備える振動素子(周波数調整前の振動素子)の平面図である。なお、図2では、説明の便宜上、互いに直交する3つの軸として、X軸、Y軸およびZ軸を図示しており、各軸を示す矢印の先端側を「+」、基端側を「−」とする。また、X軸に平行な方向を「X軸方向」、Y軸に平行な方向を「Y軸方向」、Z軸に平行な方向を「Z軸方向」という。また、+Z軸方向側を「上」、−Z軸方向側を「下」ともいう。また、本実施形態では、X軸、Y軸およびZ軸は、水晶の結晶軸である電気軸、機械軸および光軸にそれぞれ対応している。
図2に示す振動素子1は、Z軸まわりの角速度ωを検出するセンサー素子である。この振動素子1は、振動体4と、振動体4の表面に形成された電極膜パターン(図示せず)および錘膜パターン5と、を有している。
−振動体−
振動体4は、水晶基板の結晶軸であるY軸(機械軸)およびX軸(電気軸)で規定されるXY平面に広がりを有し、Z軸(光軸)方向に厚みを有する板状をなしている。すなわち、振動体4は、Zカット水晶板で構成されている。なお、Z軸は、振動体4の厚さ方向と必ずしも一致している必要はなく、常温近傍における周波数の温度による変化を小さくする観点から、厚さ方向に対して若干傾けてもよい。具体的には、Zカット水晶板とは、Z軸に直交した面をX軸およびY軸の少なくとも一方を中心に0度〜10度の範囲で回転させた面が、主面となるようなカット角の水晶板を含む。なお、振動体4は、シリコン等の圧電性を有しないものであってもよく、この場合、振動体4上に圧電素子を適宜設ければよい。
振動体4は、水晶基板の結晶軸であるY軸(機械軸)およびX軸(電気軸)で規定されるXY平面に広がりを有し、Z軸(光軸)方向に厚みを有する板状をなしている。すなわち、振動体4は、Zカット水晶板で構成されている。なお、Z軸は、振動体4の厚さ方向と必ずしも一致している必要はなく、常温近傍における周波数の温度による変化を小さくする観点から、厚さ方向に対して若干傾けてもよい。具体的には、Zカット水晶板とは、Z軸に直交した面をX軸およびY軸の少なくとも一方を中心に0度〜10度の範囲で回転させた面が、主面となるようなカット角の水晶板を含む。なお、振動体4は、シリコン等の圧電性を有しないものであってもよく、この場合、振動体4上に圧電素子を適宜設ければよい。
本実施形態の振動体4は、いわゆるダブルT型の形状をなしている。この振動体4は、基部41と、基部41から延出している1対の連結腕42、43と、連結腕42から延出している1対の駆動振動腕44、45と、連結腕43から延出している1対の駆動振動腕46、47と、基部41から延出している1対の検出振動腕48、49と、を有している。なお、この振動体4は、図2中の左右で対称に形成されている。
基部41は、前述した支持基板12および配線パターン13を介して、パッケージ11のベース111に固定されている。
連結腕42、43は、基部41からX軸方向に沿って互いに反対方向に延出している。なお、連結腕42、43の上面および下面のそれぞれに、その長さ方向(X軸方向)に延在する溝または孔を設けてもよい。
駆動振動腕44、45は、連結腕42の先端部からY軸方向に沿って互いに反対方向に延出している。同様に、駆動振動腕46、47は、連結腕43の先端部からY軸方向に沿って互いに反対方向に延出している。本実施形態では、駆動振動腕44、45、46、47の先端部には、それぞれ、駆動振動腕44、45、46、47の基端部よりも幅の広い幅広部441、451、461、471が設けられている。なお、駆動振動腕44〜47の上面および下面には、それぞれ、その延出方向に延在する溝または孔が設けられていてもよい。
検出振動腕48、49は、基部41からY軸方向に沿って互いに反対方向に延出している。本実施形態では、検出振動腕48、49の先端部には、それぞれ、検出振動腕48、49の基端部よりも幅の広い幅広部481、491が設けられている。なお、検出振動腕48、49の上面および下面には、それぞれ、その延出方向に延在する溝または孔が設けられていてもよい。
−電極膜パターン
前述した振動体4の表面に設けられている電極膜パターンは、図示しないが、駆動振動腕44〜47に設けられている駆動信号電極および駆動接地電極と、検出振動腕48、49に設けられている検出信号電極および検出接地電極と、これらの電極に対応して基部41に設けられている複数の端子と、を有している。
前述した振動体4の表面に設けられている電極膜パターンは、図示しないが、駆動振動腕44〜47に設けられている駆動信号電極および駆動接地電極と、検出振動腕48、49に設けられている検出信号電極および検出接地電極と、これらの電極に対応して基部41に設けられている複数の端子と、を有している。
−錘膜パターン−
錘膜パターン5は、図示しないが、前述した電極膜パターン上に設けられている。図2に示すように、複数の錘膜パターン5は、駆動振動腕44、45、46、47の先端部に設けられている錘膜51、52、53、54と、検出振動腕48、49の先端部に設けられている錘膜55、56と、を有している。
錘膜パターン5は、図示しないが、前述した電極膜パターン上に設けられている。図2に示すように、複数の錘膜パターン5は、駆動振動腕44、45、46、47の先端部に設けられている錘膜51、52、53、54と、検出振動腕48、49の先端部に設けられている錘膜55、56と、を有している。
錘膜51〜54は、駆動振動腕44〜47の共振周波数(以下、「駆動周波数」とも言う)を調整する機能を有する。錘膜55、56は、検出振動腕48、49の共振周波数(以下、「検出周波数」とも言う)を調整する機能を有する。後述するが、これら錘膜51〜56の少なくとも一部を除去することにより、駆動周波数または検出周波数を調整(周波数調整)することができる。なお、図2に示す錘膜51〜56は、周波数調整前の状態を示している。
このような錘膜51〜56の構成材料としては、特に限定されず、例えば、金属(金属材料)、無機化合物、樹脂等を用いることができるが、金属または無機化合物を用いるのが好ましい。金属または無機化合物は、気相成膜法により簡単かつ高精度に成膜することができる。また、金属または無機化合物で構成された錘膜51〜56は、エネルギー線(特にレーザー)の照射により簡単かつ高精度に除去することができる。このようなことから、錘膜パターン5を金属または無機化合物で成膜することにより形成することで、後述する周波数調整がより簡単かつ高精度なものとなる。
かかる金属材料としては、例えば、ニッケル(Ni)、金(Au)、金合金、白金(Pt)、アルミニウム(Al)、アルミニウム合金、銀(Ag)、銀合金、クロム(Cr)、クロム合金、銅(Cu)、モリブデン(Mo)、ニオブ(Nb)、タングステン(W)、鉄(Fe)、チタン(Ti)、コバルト(Co)、亜鉛(Zn)、ジルコニウム(Zr)等が挙げられ、これらのうち1種または2種以上を組み合わせて用いることができる。中でも、駆動電極や検出電極と一括形成できるという観点から、かかる金属材料としては、Al、Cr、Fe、Ni、Cu、Ag、Au、Ptまたはこれらのうちの少なくとも1種を含む合金を用いるのが好ましい。
また、かかる無機化合物としては、アルミナ(酸化アルミニウム)、シリカ(酸化シリコン)、チタニア(酸化チタン)、ジルコニア、イットリア、リン酸カルシウム等の酸化物セラミックス、窒化珪素、窒化アルミ、窒化チタン、窒化ボロン等の窒化物セラミックス、グラファイト、タングステンカーバイト等の炭化物系セラミックス、その他、例えばチタン酸バリウム、チタン酸ストロンチウム、PZT、PLZT、PLLZT等の強誘電体材料などが挙げられ、中でも、酸化シリコン(SiO2)、酸化チタン(TiO2)、酸化アルミニウム(Al2O3)等の絶縁材料を用いるのが好ましい。
また、各錘膜51〜56の厚さ(平均厚さ)は、特に限定されないが、例えば、10nm以上10000nm以下程度である。
以上説明したように構成された振動素子1では、振動素子1に角速度が加わらない状態において、駆動信号端子に駆動信号を入力することで駆動信号電極と駆動接地電極との間に電界が生じると、各駆動振動腕44〜47が図2中の矢印αに示す方向に屈曲振動(駆動振動)を行う。このとき、駆動振動腕44、45と駆動振動腕46、47とが図2にて左右対称の振動を行っているため、基部41および検出振動腕48、49は、ほとんど振動しない。
この駆動振動を行っている状態で、Z軸に沿った中心軸a(重心)周りの角速度ωが振動素子1に加わると、検出振動(検出モードの振動)が励振される。具体的には、駆動振動腕44〜47および連結腕42、43に図2中矢印γで示す方向のコリオリの力が働き、新たな振動が励起される。これに伴い、この連結腕42、43の振動を打ち消すように、検出振動腕48、49に図2中矢印βに示す方向の検出振動が励起される。そして、この検出振動により検出振動腕48、49に発生した電荷を、検出信号電極から検出信号として取り出し、この検出信号に基づいて角速度が求められる。
3.物理量センサーの製造方法および振動素子の周波数調整方法
次に、本発明の物理量センサーの製造方法について、前述した物理量センサー10を製造する場合を例に説明する。
次に、本発明の物理量センサーの製造方法について、前述した物理量センサー10を製造する場合を例に説明する。
図3は、本発明の第1実施形態に係る物理量センサーの製造方法(振動素子の周波数調整方法)を説明するフローチャートである。
物理量センサー10の製造方法は、図3に示すように、[1]振動素子形成工程(ステップS1)と、[2]周波数測定工程(ステップS2)と、[3]第1周波数調整工程(ステップS3)と、[4]実装工程(ステップS4)と、[5]周波数変動特性測定工程(ステップS5)と、[6]第1漏れ振動調整工程(ステップS6)と、[7]第2周波数調整工程(ステップS7)と、[8]第2漏れ振動調整工程(ステップS8)と、を有している。ここで、物理量センサー10の製造方法は、振動素子1の周波数調整方法を含んでおり、振動素子1の周波数調整方法は、上記[1]〜[8]工程のうち、[2]〜[8]工程を有している。以下、各工程を順次説明する。
[1]振動素子形成工程(ステップS1)
まず、前述した周波数調整前の錘膜51〜56を有する振動素子1を形成する(図2参照)。すなわち、[1]振動素子形成工程は、振動する検出振動腕48、49(第1振動部)および駆動振動腕44〜47(第2振動部)を有する振動素子1を形成する。
まず、前述した周波数調整前の錘膜51〜56を有する振動素子1を形成する(図2参照)。すなわち、[1]振動素子形成工程は、振動する検出振動腕48、49(第1振動部)および駆動振動腕44〜47(第2振動部)を有する振動素子1を形成する。
ここで、前述したように、駆動振動腕44〜47は、駆動信号に応じて駆動振動する「駆動振動部(第2振動部)」であり、検出振動腕48、49は、コリオリ力に応じて検出振動して検出信号を出力する「検出振動部(第1振動部)」である。また、検出振動腕48、49は、基部41から互いに異なる方向に延出している「第1、第2検出振動腕」であり、連結腕42、43は、基部41から互いに異なる方向に延出している「第1、第2連結腕」であり、駆動振動腕44〜47は、連結腕42、43の先端部から互いに異なる方向に延出している「第1〜第4駆動振動腕」である。また、錘膜51〜56は、「第1〜第6錘膜」である。
具体的には、例えば、まず、振動体4の母材である水晶基板を用意し、その水晶基板の一方の面上にフォトレジストを塗布して、振動体4に対応する形状に露光・現像することにより、レジストマスク(図示せず)を得る。次に、レジストマスクが形成された状態で水晶基板の両面にそれぞれ、例えば蒸着法、スパッタ法等によりCr層、Au層をこの順で成膜し、Au層上に例えばめっき法等によりNi層を成膜する。その後、レジストマスクを例えばエッチング等により除去することによりマスクを得る。
次に、水晶基板の一方の面側からマスクを介して水晶基板を例えばC4F8をエッチングガスとして用いた反応性イオンエッチング(RIE)によりドライエッチングする。これにより、振動体4を形成する。なお、この段階では、振動体4は、水晶基板の他の部分に連結した状態(以下、「ウエハー状態」とも言う)である。このウエハー状態では、振動体4は、例えば、幅および厚さのうちの少なくとも一方が小さく脆弱に形成された折り取り部を介して水晶基板の他の部分に連結されている。また、ウエハー状態では、水晶基板に複数の振動素子1を一括して形成することができる。
その後は、例えば、振動体4の表面に、例えば、スパッタリング等の成膜装置によって金属膜を一様に形成する。そして、フォトレジストを塗布して、露光・現像することにより、レジストマスクを得た後、エッチング液を用いて、レジストマスクから露出している部分の金属膜を除去する。これにより、電極膜パターンが形成される。
次いで、電極膜パターン上に、例えばマスク蒸着により、錘膜パターン5(錘膜51〜56)を形成する。
以上のようにして振動素子1を形成する。
以上のようにして振動素子1を形成する。
[2]周波数測定工程(ステップS2)
次に、振動素子1の駆動周波数および検出周波数をそれぞれ測定する。すなわち、[2]周波数測定工程は、検出振動腕48、49(第1振動部)および駆動振動腕44〜47(第2振動部)のそれぞれの共振周波数を測定する。このとき、振動素子1は、ウエハー状態であって、パッケージ11に実装されていない。
次に、振動素子1の駆動周波数および検出周波数をそれぞれ測定する。すなわち、[2]周波数測定工程は、検出振動腕48、49(第1振動部)および駆動振動腕44〜47(第2振動部)のそれぞれの共振周波数を測定する。このとき、振動素子1は、ウエハー状態であって、パッケージ11に実装されていない。
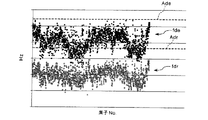
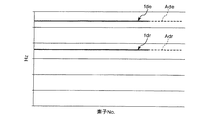
図4は、図3に示す周波数測定工程の測定結果(素子ごとの駆動周波数および検出周波数)の一例を説明するグラフである。なお、図4に示すグラフにおいて、縦軸は「周波数(Hz)」であり、横軸は「素子NO.」であり、1つの振動素子に対して1組の駆動周波数および検出周波数が対応している。
駆動周波数および検出周波数の調整を行っていない振動素子1は、図4に示すように、各素子において、駆動周波数fdrがその目標値Adrよりも低くなっているとともに、検出周波数fdeがその目標値Adeよりも低くなっている。また、駆動周波数fdrおよび検出周波数fdeがそれぞれ素子ごとにバラついている。
このような結果から、振動素子1の駆動周波数fdrおよび検出周波数fdeがそれぞれ素子ごとに目標値Adrおよび目標値Adeからどの程度ずれているかがわかる。したがって、後述する[3]第1周波数調整工程および[7]第2周波数調整工程において、そのずれ量分、駆動周波数fdrおよび検出周波数fdeを上昇させて調整すればよい。
[3]第1周波数調整工程(ステップS3)
次に、検出振動腕48、49に設けられている錘膜55、56の少なくとも一部を除去して、検出周波数の調整を行う。ここで、[3]第1周波数調整工程は、前述した[2]周波数測定工程の結果に基づいて、駆動振動腕44〜47(第2振動部)の共振周波数をその目標値まで調整するときの検出振動腕48、49(第1振動部)の共振周波数の変動量を予測し、予測した当該変動量を考慮して、検出振動腕48、49の共振周波数を調整する。
次に、検出振動腕48、49に設けられている錘膜55、56の少なくとも一部を除去して、検出周波数の調整を行う。ここで、[3]第1周波数調整工程は、前述した[2]周波数測定工程の結果に基づいて、駆動振動腕44〜47(第2振動部)の共振周波数をその目標値まで調整するときの検出振動腕48、49(第1振動部)の共振周波数の変動量を予測し、予測した当該変動量を考慮して、検出振動腕48、49の共振周波数を調整する。
図5は、図3に示す第1周波数調整工程における振動素子を説明する平面図である。図6は、図3に示す第1周波数調整工程後の素子ごとの駆動周波数および検出周波数の一例を説明するグラフである。なお、図6に示すグラフの縦軸および横軸ならびに図6中の「fdr」、「fde」、「Adr」および「Ade」は、前述した図4の説明と同様である。また、図6に示すグラフの縦軸のスケールは、前述した図4に示すグラフの縦軸のスケールと同じである。
本工程では、錘膜55、56の少なくとも一部を例えばレーザーにより除去することで、図5に示すように、錘膜55A、56Aを有する振動素子1Aを得る。このとき、図6に示すように、調整後の検出周波数が目標値よりも低くなるように検出周波数の調整を行う。これは、その後の[7]第2周波数調整工程における駆動周波数の変化(高周波数化)に伴って検出周波数も変化(高周波数化)する分を見込んでいるためである。本実施形態では、錘膜55、56の先端側の部分55RA、56RAを除去する。
図7は、図2に示す振動素子の駆動周波数の調整による変化に伴う検出周波数の変化を示すグラフである。
検出振動腕48、49は、基部41および連結腕42、43を介して駆動振動腕44〜47に接続されていて駆動振動腕44〜47とは完全には独立した振動系でない。そのため、駆動周波数の変化(高周波数化)に伴って検出周波数も変化(高周波数化)してしまう。このような駆動周波数の変化に伴う検出周波数の変化は、図7に示すように、線形となる。
なお、図7に示す駆動周波数の変化に伴う検出周波数の変化は、ある形態の振動素子について、実験により求めた一例である。また、かかる実験は、錘膜にレーザーを所定ピッチずつずらして複数回ライン状に走査・照射して錘膜を除去することで駆動周波数を変化させ、その際の駆動周波数および検出周波数のそれぞれを測定することにより行ったものである。
[3]第1周波数調整工程においては、このような線形の関係式、[2]周波数測定工程で測定された駆動振動腕44〜47の共振周波数、および、[7]第2周波数調整工程における駆動振動腕44〜47の共振周波数の目標値を用いて、駆動振動腕44〜47の共振周波数をその目標値まで調整するときの検出振動腕48、49の共振周波数の変動量を求める。
ここで、かかる関係式が1次式であり、[2]周波数測定工程で測定された駆動振動腕44〜47の共振周波数と[7]第2周波数調整工程における駆動振動腕44〜47の共振周波数の目標値との差分を用いて、駆動振動腕44〜47の共振周波数をその目標値まで調整するときの検出振動腕48、49の共振周波数の変動量を求める。
より具体的には、[2]周波数測定工程で得られた駆動周波数fdrと目標値Adrとの差、すなわち、後述する[7]第2周波数調整工程における駆動周波数の調整量(駆動周波数変化Δfdr)を、前述した関係式に代入することで、[7]第2周波数調整工程での検出周波数の予測変化量(検出周波数変化Δfde1)を求める。
そして、求められた検出周波数の予測変化量分を、[2]周波数測定工程で得られた検出周波数fdeと目標値Adeとの差、すなわち、最終的な検出周波数の調整量から差し引くことで、[3]第1周波数調整工程における検出周波数の調整量を求める。このようにして、目標値Adeよりも低い調整値を求め、その調整値となるように、検出周波数を調整する。
[4]実装工程(ステップS4)
次に、図示しないが、ウエハー状態の振動素子1を水晶基板から切り離し(例えば折り取り部を折り取り)、前述したパッケージ11のベース111に実装する。なお、本工程では、リッド112は、ベース111に接合してもよいし、しなくてもよい。
次に、図示しないが、ウエハー状態の振動素子1を水晶基板から切り離し(例えば折り取り部を折り取り)、前述したパッケージ11のベース111に実装する。なお、本工程では、リッド112は、ベース111に接合してもよいし、しなくてもよい。
[5]周波数変動特性測定工程(ステップS5)
その後、振動素子1をパッケージ11に実装した状態で、錘膜51〜54の少なくとも1つの一部を規定量だけ除去し、それによる駆動周波数の変化量を測定することで、加工量に対する駆動周波数の変化量(単位加工量あたりの駆動周波数の変化量)を求める。ここで、振動素子1が複数ある場合、[5]周波数変動特性測定工程は、複数の振動素子1のうちの少なくとも1つを選択して行えばよい。
その後、振動素子1をパッケージ11に実装した状態で、錘膜51〜54の少なくとも1つの一部を規定量だけ除去し、それによる駆動周波数の変化量を測定することで、加工量に対する駆動周波数の変化量(単位加工量あたりの駆動周波数の変化量)を求める。ここで、振動素子1が複数ある場合、[5]周波数変動特性測定工程は、複数の振動素子1のうちの少なくとも1つを選択して行えばよい。
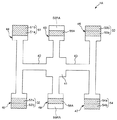
図8は、図3に示す周波数変動特性測定工程における振動素子を説明する平面図である。
本工程では、錘膜51〜54のうち、少なくとも1つの錘膜(本実施形態では錘膜53)を選択し、選択された錘膜の一部を1ライン分だけ除去する。これにより、例えば、図8に示すように、規定量だけ除去された錘膜53Bを有する振動素子1Bを得る。ここで、選択された錘膜53は、後述する[6]第1漏れ振動調整工程で加工する錘膜である。本実施形態では、[6]第1漏れ振動調整工程で加工する錘膜は、錘膜53、54であり、錘膜53の方が錘膜54よりも[6]第1漏れ振動調整工程での加工量が大きい。また、本工程での加工量は、後述する[6]第1漏れ振動調整工程での加工量よりも少ないことが好ましい。これにより、本工程で加工された振動素子1が無駄となることを防止することができる。本実施形態では、錘膜53の先端側の部分53RBを除去する。
[6]第1漏れ振動調整工程(ステップS6)
次に、駆動振動腕44〜47の共振周波数が互いに等しくなるように、錘膜51〜54の少なくとも一部を除去して、振動漏れの調整(粗調整)を行う。すなわち、[6]第1漏れ振動調整工程は、[3]第1周波数調整工程と[7]第2周波数調整工程との間に、駆動振動腕44〜47(第2振動部)の振動漏れを低減させる調整を行う。
次に、駆動振動腕44〜47の共振周波数が互いに等しくなるように、錘膜51〜54の少なくとも一部を除去して、振動漏れの調整(粗調整)を行う。すなわち、[6]第1漏れ振動調整工程は、[3]第1周波数調整工程と[7]第2周波数調整工程との間に、駆動振動腕44〜47(第2振動部)の振動漏れを低減させる調整を行う。
ここで、「振動漏れ」とは、駆動振動腕44〜47を駆動振動させており、かつ回転が加わっていない時に、検出振動腕48、49から出力される信号(オフセットあるいはゼロ点信号)のことをいう。
図9は、図3に示す第1漏れ振動調整工程における振動素子を説明する平面図である。
本工程では、錘膜51〜54(または錘膜51、52、53B、54)のうち、少なくとも1つの錘膜(本実施形態では錘膜53B、54)を選択し、選択された錘膜の少なくとも一部を除去する。これにより、図9に示すように、所定量除去された錘膜53C、54Cを有する振動素子1Cを得る。本実施形態では、錘膜53B、54の先端側の部分53RC、54RCを除去する。
本工程では、錘膜51〜54(または錘膜51、52、53B、54)のうち、少なくとも1つの錘膜(本実施形態では錘膜53B、54)を選択し、選択された錘膜の少なくとも一部を除去する。これにより、図9に示すように、所定量除去された錘膜53C、54Cを有する振動素子1Cを得る。本実施形態では、錘膜53B、54の先端側の部分53RC、54RCを除去する。
特に、本実施形態では、錘膜53を長さ方向(駆動振動腕46の延出方向)に2分割した領域53a、53bに分けて捉え、その2分割した領域53a、53bのうちの一方(本実施形態では先端側)の領域53bを[6]第1漏れ振動調整工程に用い、他方(本実施形態では基端側)の領域53aを[7]第2周波数調整工程に用いる。同様に、錘膜51を領域51a、51bに分けて捉え、錘膜52を領域52a、52bに分けて捉え、錘膜54を領域54a、54bに分けて捉える。
[7]第2周波数調整工程(ステップS7)
次に、駆動振動腕44〜47に設けられている錘膜51、52、53C、54Cのそれぞれの少なくとも一部を除去して、駆動周波数、すなわち駆動振動腕44〜47(第2振動部)の共振周波数を調整する。このとき、本実施形態では、駆動振動腕44〜47に設けられている錘膜51、52、53C、54Cのそれぞれの少なくとも一部を同量ずつ除去する。これにより、漏れ振動が増えるのを低減することができる。
次に、駆動振動腕44〜47に設けられている錘膜51、52、53C、54Cのそれぞれの少なくとも一部を除去して、駆動周波数、すなわち駆動振動腕44〜47(第2振動部)の共振周波数を調整する。このとき、本実施形態では、駆動振動腕44〜47に設けられている錘膜51、52、53C、54Cのそれぞれの少なくとも一部を同量ずつ除去する。これにより、漏れ振動が増えるのを低減することができる。
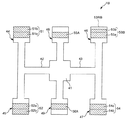
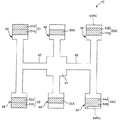
図10は、図3に示す第2周波数調整工程における振動素子を説明する平面図である。図11は、図3に示す第2周波数調整工程後の素子ごとの駆動周波数および検出周波数の一例を説明するグラフである。なお、図11に示すグラフの縦軸および横軸ならびに図11中の「fdr」、「fde」、「Adr」および「Ade」は、前述した図4の説明と同様である。また、図11に示すグラフの縦軸のスケールは、前述した図4に示すグラフの縦軸のスケールと同じである。
本工程では、錘膜51、52、53C、54Cのそれぞれの少なくとも一部を例えばレーザーにより除去することで、図10に示すように、錘膜51D〜54Dを有する振動素子1Dを得る。このとき、図11に示すように、調整後の駆動周波数が目標値となるように駆動周波数の調整を行う。このとき、駆動周波数の変化に伴って検出周波数も変化して目標値となる。本実施形態では、錘膜51、52、53C、54Cの基端側の部分51RD〜54RDを除去する。これらの部分51RD〜54RDは、互いに平面視で同形状および同面積であり、また、振動素子1Cの中心から互いに等距離にある。これにより、同じ加工量で駆動振動腕44〜47の共振周波数を同じ量だけ変化させることができる。そのため、比較的簡単に、前述した[6]第1漏れ振動調整工程後のバランスをできるだけ維持しつつ、各駆動振動腕44〜47の共振周波数を調整することができる。
特に、本実施形態では、前述した領域51a〜54aを[7]第2周波数調整工程に用いる。これにより、[7]第2周波数調整工程での調整を簡単かつ高精度に行うことができる。これに対し、例えば、[6]第1漏れ振動調整工程および[7]第2周波数調整工程で錘膜53の一端から連続的に錘膜53を除去すると、[6]第1漏れ振動調整工程での加工量の変動に伴って、[7]第2周波数調整工程での加工位置が変動してしまい、それに伴って、同じ加工量でも駆動周波数が変動してしまう。
また、[7]前記第2周波数調整工程において、駆動振動腕44〜47(第2振動部)の共振周波数の調整は、複数回に分けて行うことが好ましい。これにより、歩留まりよく、駆動振動腕44〜47の共振周波数を高精度に調整することができる。
[8]第2漏れ振動調整工程(ステップS8)
その後、必要に応じて、前述した[6]第1漏れ振動調整工程と同様に、駆動振動腕44〜47の共振周波数が互いに等しくなるように、錘膜51〜54の少なくとも一部を除去して、振動漏れの調整(微調整)を行う。すなわち、[8]第2漏れ振動調整工程は、[7]第2周波数調整工程の後に、駆動振動腕44〜47(第2振動部)の振動漏れを低減させる調整を行い、[8]第2漏れ振動調整工程における駆動振動腕44〜47の共振周波数の変化量は、[6]第1漏れ振動調整工程における駆動振動腕44〜47の共振周波数の変化量よりも小さい。これにより、[6]第1漏れ振動調整工程での調整が不足していたり、[7]第2周波数調整工程で振動素子1の振動バランスが崩れたりしても、振動漏れを低減することができる。
以上により、所望の周波数特性を有する物理量センサー10を得る。
その後、必要に応じて、前述した[6]第1漏れ振動調整工程と同様に、駆動振動腕44〜47の共振周波数が互いに等しくなるように、錘膜51〜54の少なくとも一部を除去して、振動漏れの調整(微調整)を行う。すなわち、[8]第2漏れ振動調整工程は、[7]第2周波数調整工程の後に、駆動振動腕44〜47(第2振動部)の振動漏れを低減させる調整を行い、[8]第2漏れ振動調整工程における駆動振動腕44〜47の共振周波数の変化量は、[6]第1漏れ振動調整工程における駆動振動腕44〜47の共振周波数の変化量よりも小さい。これにより、[6]第1漏れ振動調整工程での調整が不足していたり、[7]第2周波数調整工程で振動素子1の振動バランスが崩れたりしても、振動漏れを低減することができる。
以上により、所望の周波数特性を有する物理量センサー10を得る。
以上説明したような物理量センサー10の製造方法および振動素子1の周波数調整方法は、それぞれ、振動する駆動振動腕44〜47(第2振動部)および検出振動腕48、49(第1振動部)を有する振動素子1を形成する[1]振動素子形成工程と、駆動振動腕44〜47および検出振動腕48、49のそれぞれの共振周波数を測定する[2]周波数測定工程と、[2]周波数測定工程の結果に基づいて、駆動振動腕44〜47の共振周波数を目標値まで調整するときの検出振動腕48、49の共振周波数の変動量を予測変動量として求め、その予測変動量および[2]周波数測定工程において測定した検出振動腕48、49の共振周波数に基づいて、検出振動腕48、49の共振周波数を調整する[3]第1周波数調整工程と、駆動振動腕44〜47の共振周波数を調整する[7]第2周波数調整工程と、を有する。
ここで、振動素子1は、前述したように、基部41と、基部41から互いに異なる方向に延出している検出振動腕48、49(第1、第2検出振動腕)と、基部41から互いに異なる方向に延出している連結腕42、43(第1、第2連結腕)と、連結腕42、43の先端部から互いに異なる方向に延出している駆動振動腕44〜47(第1〜第4駆動振動腕)と、を備え、第2振動部である駆動振動腕44〜47には、錘膜51〜54(第1〜第4錘膜)が設けられ、第1振動部である検出振動腕48、49には、錘膜55、56(第5、第6錘膜)が設けられている。
そして、[3]第1周波数調整工程において、錘膜55、56のうちの少なくとも一方の一部を除去することで、検出振動腕48、49の共振周波数を調整し、[7]第2周波数調整工程において、錘膜51〜54のうちの少なくとも1つの一部を除去することで、駆動振動腕44〜47の共振周波数を調整する。これにより、いわゆるダブルT型の振動素子1の駆動周波数、検出周波数および離調周波数の調整を簡単かつ高精度に行うことができる。
このような物理量センサー10の製造方法および振動素子1の周波数調整方法によれば、それぞれ、[3]第1周波数調整工程において、駆動振動腕44〜47の共振周波数をその目標値まで調整するときの検出振動腕48、49の共振周波数の変動量を予測し、予測した当該変動量を考慮して、検出振動腕48、49の共振周波数を調整するため、[7]第2周波数調整工程において、駆動振動腕44〜47の共振周波数を調整するのに伴って、検出振動腕48、49の共振周波数を目標値に調整することができる。そのため、駆動振動腕44〜47および検出振動腕48、49の共振周波数をそれぞれの目標値に高精度に調整し、それに伴って、駆動振動腕44〜47の共振周波数と検出振動腕48、49の共振周波数との差である離調周波数もその目標値に高精度に調整することができる。よって、駆動振動腕44〜47および検出振動腕48、49を有する振動素子1の素子ごとの特性のバラツキを低減することができる。
特に、[3]第1周波数調整工程において、駆動振動腕44〜47(第2振動部)の共振周波数を調整するときの調整量に対する検出振動腕48、49(第1振動部)の共振周波数の変動量の関係式、[2]周波数測定工程で測定された駆動振動腕44〜47の共振周波数、および、[7]第2周波数調整工程における駆動振動腕44〜47の共振周波数の目標値を用いて、前述した予測変動量を求める。これにより、駆動振動腕44〜47の共振周波数をその目標値まで調整するときの検出振動腕48、49の共振周波数の変動量を簡単かつ高精度に求めることができる。
ここで、かかる関係式が1次式であり、[3]第1周波数調整工程において、かかる関係式、および、[2]周波数測定工程で測定された駆動振動腕44〜47(第2振動部)の共振周波数と[7]第2周波数調整工程における駆動振動腕44〜47の共振周波数の目標値との差分を用いて、前述した予測変動量を求める。これにより、駆動振動腕44〜47の共振周波数をその目標値まで調整するときの検出振動腕48、49の共振周波数の変動量をより簡単かつ高精度に求めることができる。
また、振動素子1において、第2振動部(駆動振動部)である駆動振動腕44〜47は、駆動信号に応じて駆動振動し、第1振動部(検出振動部)である検出振動腕48、49は、駆動振動腕44〜47に働くコリオリ力に応じて検出振動して検出信号を出力する。このような駆動振動腕44〜47および検出振動腕48、49を有する振動素子1は、[2]周波数測定工程において、駆動信号のための配線を利用して駆動振動腕44〜47の共振周波数を測定するとともに、検出信号のための配線を利用して検出振動腕48、49の共振周波数を測定することができる。また、検出振動腕48、49の共振周波数の調整の後に、駆動振動腕44〜47の共振周波数の調整を行うため、製品に近い実装状態で駆動振動腕44〜47の共振周波数の調整を行うことができる。
また、物理量センサー10の製造方法は、[6]第1漏れ振動調整工程および[8]第2漏れ振動調整工程を有し、[6]第1漏れ振動調整工程は、[3]第1周波数調整工程と[7]第2周波数調整工程との間に、駆動振動腕44〜47(第2振動部)の振動漏れを低減させる調整を行い、[8]第2漏れ振動調整工程は、[7]第2周波数調整工程の後に、駆動振動腕44〜47の振動漏れを低減させる調整を行う。ここで、[8]第2漏れ振動調整工程における駆動振動腕44〜47の共振周波数の変化量は、[6]第1漏れ振動調整工程における駆動振動腕44〜47の共振周波数の変化量よりも小さい。これにより、得られる物理量センサー10において、駆動振動腕44〜47の漏れ振動を低減することができる。特に、駆動振動腕44〜47の漏れ振動を低減する工程を、[7]第2周波数調整工程を挟んで[6]第1漏れ振動調整工程および[8]第2漏れ振動調整工程の2回に分け、[8]第2漏れ振動調整工程における駆動振動腕44〜47の共振周波数の変化量を[6]第1漏れ振動調整工程における駆動振動腕44〜47の共振周波数の変化量よりも小さくすることで、駆動振動腕44〜47の共振周波数の変動を低減しつつ、駆動振動腕44〜47の漏れ振動を効果的に低減することができる。
特に、錘膜51〜54(第1〜第4錘膜)のそれぞれを2つの領域に分割(領域51a〜54aと領域51b〜54bとに分割)して捉え、漏れ振動調整工程である[6]第1漏れ振動調整工程において、各錘膜51〜54の少なくともいずれかの2つの領域のうちの一方の領域(領域51b〜54b)の少なくとも一部を除去する。そして、[7]第2周波数調整工程において、各錘膜51〜54の2つの領域のうちの他方の領域(領域51a〜54a)の少なくとも一部を除去する。これにより、[7]第2周波数調整工程における錘膜51〜54の除去位置が[6]第1漏れ振動調整工程における錘膜51〜54の除去位置の影響を受けるのを低減することができる。そのため、[7]第2周波数調整工程における駆動振動腕44〜47の共振周波数の調整を簡単かつ高精度に行うことができる。
<第2実施形態>
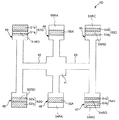
図12は、本発明の第2実施形態に係る第1周波数調整工程における振動素子を説明する平面図である。図13は、本発明の第2実施形態に係る第1漏れ振動調整工程における振動素子を説明する平面図である。図14は、本発明の第2実施形態に係る第2周波数調整工程における振動素子を説明する平面図である。
図12は、本発明の第2実施形態に係る第1周波数調整工程における振動素子を説明する平面図である。図13は、本発明の第2実施形態に係る第1漏れ振動調整工程における振動素子を説明する平面図である。図14は、本発明の第2実施形態に係る第2周波数調整工程における振動素子を説明する平面図である。
以下、本実施形態について、前述した実施形態との相違点を中心に説明し、同様の事項はその説明を省略する。
本実施形態の物理量センサー10の製造方法では、図12に示すように、錘膜51を幅方向(駆動振動腕44の幅方向)に2分割した領域51c、51dに分けて捉え、その2分割した領域51c、51dのうちの一方(本実施形態では基部41側)の領域51cを[6]第1漏れ振動調整工程に用い、他方(本実施形態では基部41とは反対側)の領域51dを[7]第2周波数調整工程に用いる。同様に、錘膜52を領域52c、52dに分けて捉え、錘膜53を領域53c、53dに分けて捉え、錘膜54を領域54c、54dに分けて捉える。
本実施形態の[6]第1漏れ振動調整工程では、駆動振動腕44〜47の共振周波数が互いに等しくなるように、錘膜53、54の領域53c、54cのそれぞれの一部(図示では、部分53RE、54RE)を除去して、振動漏れの調整(粗調整)を行う。これにより、図13に示すように、所定量除去された錘膜53E、54Eを有する振動素子1Eを得る。
また、本実施形態の[7]第2周波数調整工程では、錘膜51〜54の領域51d〜54dのそれぞれの少なくとも一部(図示では、部分51RF〜54RF)を同量ずつ除去して、駆動周波数の調整を行う。図14に示すように、錘膜51F〜54Fを有する振動素子1Fを得る。
以上説明したような製造方法によって製造された物理量センサー10は、各種デバイス、各種電子機器、各種移動体等に組み込んで使用することができる。
以上、本発明の物理量センサーの製造方法および振動素子の周波数調整方法について、図示の実施形態に基づいて説明したが、本発明は、これらに限定されるものではない。
また、本発明では、各部の構成は、同様の機能を発揮する任意の構成のものに置換することができ、また、任意の構成を付加することもできる。
また、前述した実施形態では、ダブルT型の振動素子に本発明を適用した場合を例に説明したが、本発明を適用可能な振動素子は、2つ以上の振動腕(第1振動部および第2振動部)を有する振動素子であれば、特に限定されず、例えば、H型の振動素子であってもよい。また、図示の振動素子の形状、大きさ等の形態は、説明の便宜上模式的に示したものであり、本発明を適用可能な振動素子が図示のものに限定されないことは言うまでもない。
1…振動素子、1A…振動素子、1B…振動素子、1C…振動素子、1D…振動素子、1E…振動素子、1F…振動素子、4…振動体、5…錘膜パターン、10…物理量センサー、11…パッケージ、12…支持基板、13…配線パターン、14…回路素子、15…導電性ワイヤー、41…基部、42…連結腕、43…連結腕、44…駆動振動腕、45…駆動振動腕、46…駆動振動腕、47…駆動振動腕、48…検出振動腕、49…検出振動腕、51…錘膜、51D…錘膜、51F…錘膜、51RA…部分、51RD〜54RD…部分、51RF〜54RF…部分、51a…領域、51b…領域、51c…領域、51d…領域、52…錘膜、52D…錘膜、52F…錘膜、52a…領域、52b…領域、52c…領域、52d…領域、53…錘膜、53B…錘膜、53C…錘膜、53D…錘膜、53E…錘膜、53F…錘膜、53RB…部分、53RC…部分、51RE…部分、53a…領域、53b…領域、53c…領域、53d…領域、54…錘膜、54C…錘膜、54D…錘膜、54E…錘膜、54F…錘膜、54RC…部分、51RE…部分、54a…領域、54b…領域、54c…領域、54d…領域、55…錘膜、55A…錘膜、55RA…部分、56…錘膜、56A…錘膜、56RA…部分、111…ベース、112…リッド、113…接合部材、441…幅広部、451…幅広部、461…幅広部、471…幅広部、481…幅広部、491…幅広部、Ade…目標値、Adr…目標値、S1…ステップ、S2…ステップ、S3…ステップ、S4…ステップ、S5…ステップ、S6…ステップ、S7…ステップ、S8…ステップ、a…中心軸、fde…検出周波数、fdr…駆動周波数、α…矢印、β…矢印、γ…矢印、ω…角速度
Claims (9)
- 第1振動部および第2振動部を有する振動素子を形成する振動素子形成工程と、
前記第1振動部および前記第2振動部のそれぞれの共振周波数を測定する周波数測定工程と、
前記周波数測定工程の結果に基づいて、前記第2振動部の共振周波数を目標値まで調整するときの前記第1振動部の共振周波数の変動量を予測変動量として求め、前記予測変動量および前記周波数測定工程において測定した前記第1振動部の共振周波数に基づいて、前記第1振動部の共振周波数を調整する第1周波数調整工程と、
前記第2振動部の共振周波数を調整する第2周波数調整工程と、を有することを特徴とする物理量センサーの製造方法。 - 前記第1周波数調整工程において、前記第2振動部の共振周波数を調整するときの調整量に対する前記第1振動部の共振周波数の変動量の関係式、前記周波数測定工程で測定された前記第2振動部の共振周波数、および、前記第2周波数調整工程における前記第2振動部の共振周波数の目標値を用いて、前記予測変動量を求める請求項1に記載の物理量センサーの製造方法。
- 前記関係式が1次式であり、
前記第1周波数調整工程において、前記関係式、および、前記周波数測定工程で測定された前記第2振動部の共振周波数と前記第2周波数調整工程における前記第2振動部の共振周波数の目標値との差分を用いて、前記予測変動量を求める請求項2に記載の物理量センサーの製造方法。 - 前記第2振動部は、駆動信号に応じて駆動振動する駆動振動部であり、
前記第1振動部は、前記第2振動部に働くコリオリ力に応じて検出振動して検出信号を出力する検出振動部である請求項1ないし3のいずれか1項に記載の物理量センサーの製造方法。 - 前記第1周波数調整工程と前記第2周波数調整工程との間に、前記第2振動部の振動漏れを低減させる調整を行う第1漏れ振動調整工程と、
前記第2周波数調整工程の後に、前記第2振動部の振動漏れを低減させる調整を行う第2漏れ振動調整工程と、を有し、
前記第2漏れ振動調整工程における前記第2振動部の共振周波数の変化量は、前記第1漏れ振動調整工程における前記第2振動部の共振周波数の変化量よりも小さい請求項1ないし4のいずれか1項に記載の物理量センサーの製造方法。 - 前記第2周波数調整工程において、前記第2振動部の共振周波数の調整を複数回に分けて行う請求項1ないし5のいずれか1項に記載の物理量センサーの製造方法。
- 前記振動素子は、
基部と、
前記基部から互いに異なる方向に延出している第1検出振動腕および第2検出振動腕と、
前記基部から互いに異なる方向に延出している第1連結腕および第2連結腕と、
前記第1連結腕の先端部から互いに異なる方向に延出している第1駆動振動腕および第2駆動振動腕と、
前記第2連結腕の先端部から互いに異なる方向に延出している第3駆動振動腕および第4駆動振動腕と、を備え、
前記第1駆動振動腕には、第1錘膜が設けられ、
前記第2駆動振動腕には、第2錘膜が設けられ、
前記第3駆動振動腕には、第3錘膜が設けられ、
前記第4駆動振動腕には、第4錘膜が設けられ、
前記第1検出振動腕には、第5錘膜が設けられ、
前記第2検出振動腕には、第6錘膜が設けられ、
前記第1検出振動腕および前記第2検出振動腕が前記第1振動部であり、
前記第1駆動振動腕、前記第2駆動振動腕、前記第3駆動振動腕および前記第4駆動振動腕が前記第2振動部であり、
前記第1周波数調整工程において、前記第5錘膜および前記第6錘膜のうちの少なくとも一方の一部を除去することで、前記第1振動部の共振周波数を調整し、
前記第2周波数調整工程において、前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜のうちの少なくとも1つの一部を除去することで、前記第2振動部の共振周波数を調整する請求項1ないし6のいずれか1項に記載の物理量センサーの製造方法。 - 前記第1周波数調整工程と前記第2周波数調整工程との間に、前記第2振動部の振動漏れを低減させるための調整を行う漏れ振動調整工程を有し、
前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜のそれぞれを2つの領域に分割して捉え、
前記漏れ振動調整工程において、前記第1錘膜、前記第2錘膜、前記第3錘膜および前記第4錘膜の少なくともいずれかの前記2つの領域のうちの一方の領域の少なくとも一部を除去し、
前記第2周波数調整工程において、前記2つの領域のうちの他方の領域の少なくとも一部を除去する請求項7に記載の物理量センサーの製造方法。 - 第1振動部および第2振動部を有する振動素子の周波数調整方法であって、
前記第1振動部および前記第2振動部のそれぞれの共振周波数を測定する周波数測定工程と、
前記周波数測定工程の結果に基づいて、前記第2振動部の共振周波数を目標値まで調整するときの前記第1振動部の共振周波数の変動量を予測変動量として求め、前記予測変動量および前記周波数測定工程において測定した前記第1振動部の共振周波数に基づいて、前記第1振動部の共振周波数を調整する第1周波数調整工程と、
前記第2振動部の共振周波数を調整する第2周波数調整工程と、を有することを特徴とする振動素子の周波数調整方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095446A JP2017203692A (ja) | 2016-05-11 | 2016-05-11 | 物理量センサーの製造方法および振動素子の周波数調整方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095446A JP2017203692A (ja) | 2016-05-11 | 2016-05-11 | 物理量センサーの製造方法および振動素子の周波数調整方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017203692A true JP2017203692A (ja) | 2017-11-16 |
Family
ID=60323216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016095446A Pending JP2017203692A (ja) | 2016-05-11 | 2016-05-11 | 物理量センサーの製造方法および振動素子の周波数調整方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017203692A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111351479A (zh) * | 2018-12-21 | 2020-06-30 | 精工爱普生株式会社 | 振动元件、振动元件的制造方法、物理量传感器、惯性测量装置、电子设备以及移动体 |
-
2016
- 2016-05-11 JP JP2016095446A patent/JP2017203692A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111351479A (zh) * | 2018-12-21 | 2020-06-30 | 精工爱普生株式会社 | 振动元件、振动元件的制造方法、物理量传感器、惯性测量装置、电子设备以及移动体 |
| US11402208B2 (en) | 2018-12-21 | 2022-08-02 | Seiko Epson Corporation | Vibration element, method of manufacturing vibration element, physical quantity sensor, inertial measurement unit, electronic device, and vehicle |
| CN111351479B (zh) * | 2018-12-21 | 2024-02-20 | 精工爱普生株式会社 | 振动元件、振动元件的制造方法、物理量传感器、惯性测量装置、电子设备以及移动体 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7207221B2 (en) | Vibration type gyroscope and method for manufacturing vibration type gyroscope | |
| US8756994B2 (en) | Vibrating gyro device and manufacturing method therefor | |
| US8191216B2 (en) | Vibrating piece manufacturing method and vibrator manufacturing method | |
| JP7139610B2 (ja) | 振動素子、振動素子の製造方法、物理量センサー、慣性計測装置、電子機器および移動体 | |
| US9222775B2 (en) | Vibrator element, sensor unit, and electronic device | |
| US7673512B2 (en) | Angular velocity sensor and electronic device | |
| US8443665B2 (en) | Frequency modulated micro gyro | |
| US10079590B2 (en) | Vibrator element, electronic device, electronic apparatus, moving object, and method of manufacturing vibrator element | |
| JP7571833B2 (ja) | 振動素子、物理量センサー、慣性計測装置、電子機器および移動体 | |
| CN111351479A (zh) | 振动元件、振动元件的制造方法、物理量传感器、惯性测量装置、电子设备以及移动体 | |
| JP6848589B2 (ja) | 振動素子の周波数調整方法、振動素子の製造方法および振動素子 | |
| JP5765087B2 (ja) | 屈曲振動片、その製造方法及び電子機器 | |
| JP2013186029A (ja) | 振動片、センサーユニットおよび電子機器 | |
| CN110323328B (zh) | 振动元件及其频率调整方法和制造方法、物理量传感器、惯性测量装置、电子设备和移动体 | |
| US20190301867A1 (en) | Vibrating element, physical quantity sensor, inertial measurement device, electronic apparatus, vehicle, and method of manufacturing vibrating element | |
| JP2008096138A (ja) | 角速度センサの製造方法および角速度センサ | |
| WO2013132830A1 (ja) | 慣性力センサ | |
| JP2010122141A (ja) | Memsセンサ | |
| JP2017203692A (ja) | 物理量センサーの製造方法および振動素子の周波数調整方法 | |
| JP2015001420A (ja) | ジャイロセンサー素子、ジャイロ装置、電子機器および移動体 | |
| JP2017207283A (ja) | 振動素子の製造方法 | |
| JP6210345B2 (ja) | ジャイロセンサー素子、ジャイロセンサーユニット、電子機器及びジャイロセンサーユニットの製造方法 | |
| JP2015169492A (ja) | 電子デバイス、電子デバイスの信号検出方法、電子機器、および移動体 | |
| JP2010145122A (ja) | 圧電振動子および振動ジャイロ装置 | |
| JP2008096139A (ja) | 角速度センサ及びその駆動方法 |