JP2017204152A - 車両制御システムおよび車両制御装置 - Google Patents
車両制御システムおよび車両制御装置 Download PDFInfo
- Publication number
- JP2017204152A JP2017204152A JP2016095608A JP2016095608A JP2017204152A JP 2017204152 A JP2017204152 A JP 2017204152A JP 2016095608 A JP2016095608 A JP 2016095608A JP 2016095608 A JP2016095608 A JP 2016095608A JP 2017204152 A JP2017204152 A JP 2017204152A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- time
- unit
- packet
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18154—Approaching an intersection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/162—Decentralised systems, e.g. inter-vehicle communication event-triggered
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/30—Data update rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
第1車両制御装置は、第2車両が、第1車両に対する車両制御を第2車両制御装置が開始するための第1車両情報を取得する第1車両情報取得部(401)と、第1車両情報を取得した時刻を表す第1時刻を取得し、第1時刻と第1車両情報とを含む第1車両パケットを生成する車両パケット生成部(404)と、第1車両パケットを送信する第1車両送信部(21、31)とを備え、
第2車両制御装置は、第1車両パケットを受信するための第2車両受信部(22、32)と、第2車両受信部が受信した信号を取得して第1車両パケットを受信したか否かを逐次判断する受信判断部(406)と、受信判断部が、第1車両パケットを受信したと判断した時刻を表す第2時刻を取得する第2時刻取得部(403)と、第2車両受信部が受信した第1車両パケットに含まれている第1時刻と、第2時刻取得部が取得した第2時刻の差分である通信遅延時間を算出する遅延算出部(409)と、第1時刻と第2時刻とが同時刻であると仮定した場合に第1車両情報に基づいて定まる車両制御である遅延非参酌制御を、通信遅延時間に基づいて変更した遅延参酌制御を実行する第2車両制御部(70)とを備える。
車両制御装置が用いられる車両である自車両の周辺に存在する周辺車両が送信したパケットであって、周辺車両に対する車両制御を車両制御装置が開始するための周辺車両情報と、周辺車両情報が生成された時刻を表す第1時刻と含んでいる周辺車両パケットを受信する受信部(22、32)と、受信部が受信した信号を取得して周辺車両パケットを受信したか否かを逐次判断する受信判断部(406)と、受信判断部が、周辺車両パケットを受信したと判断した時刻を表す第2時刻を取得する第2時刻取得部(403)と、受信部が受信した周辺車両パケットに含まれている第1時刻と、第2時刻取得部が取得した第2時刻の差分である通信遅延時間を算出する遅延算出部(409)と、第1時刻と第2時刻とが同時刻であると仮定した場合に周辺車両情報に基づいて定まる制御である遅延非参酌制御を、通信遅延時間に基づいて変更した遅延参酌制御を実行する車両制御部(70)とを備える。
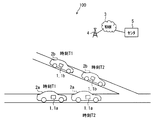
異なる車両2にそれぞれ搭載された車載システム1は互いに無線通信する。車両2は、道路上を走行する車両であれば特に限定はない。4輪車、オートバイ、自転車などが車両に含まれる。
次に、車載システム1の構成を説明する。車載システム1は、図2に示すように、通信ユニット10、ロケータ60、車両制御部70、報知部80を備える。通信ユニット10は、車両内に構築された通信ネットワークであるLAN(Local Area Network)50を介してロケータ60、車両制御部70と通信可能に接続される。すなわち、本実施形態では、通信ユニット10と、ロケータ60、車両制御部70とは、別体として構成されている。
通信ユニット10は自車両の周辺に存在する他車両(以下、周辺車両)に搭載された車載システム1との間で車両パケットの送受信を実施するためのユニットである。通信ユニット10は、狭域通信部20、広域通信部30、通信制御部40を備え、狭域通信部20および広域通信部30はそれぞれ通信制御部40と相互に通信可能に接続されている。
上述した機能を実行するために、通信制御部40は、図2に示すように、自車両軌道情報取得部401、時計部402、時刻取得部403、車両パケット生成部404、送信制御部405、受信判断部406、同一判断部407、メモリ408、遅延算出部409、車両内送信部410を備える。
次に、通信制御部40が実施する車両パケット送信処理について、図3に示すフローチャートを用いて述べる。ここでは、第1車両2aに搭載されている車載システム1aが備える通信制御部40が図3の処理を実行しているとする。この場合、車載システム1aは第1車両制御装置として機能することになる。また、この場合、自車両軌道情報取得部401は第1車両情報取得部に相当し、狭域送信部21、広域送信部31は第1車両送信部に相当する。
次に、通信制御部40が実施する車両パケット受信処理について、図4に示すフローチャートを用いて述べる。ここでは、第2車両2bに搭載されている車載システム1bが備える通信制御部40が図4の処理を実行しているとする。この場合、車載システム1bは第2車両制御装置として機能することになる。また、この場合、狭域受信部22、広域受信部32は第2車両受信部に相当する。また、第2車両2bは、第1車両2aの周辺に存在している、すなわち、第2車両2bは第1車両2aの周辺車両であるとする。これは、第2車両2bの周辺に存在する車両2を第1車両2aであるとすることを意味する。
次に、車両制御部70が実行する処理について、図5に示すフローチャートを用いて述べる。ここでは、第2車両2bに搭載されている車載システム1bが備える車両制御部70が図5の処理を実行しているとする。この場合、車両制御部70は第2車両制御部に相当する。車両制御部70は図5のフローチャートに示す処理を周期的に繰り返し実行する。周期はたとえば100ミリ秒、あるいは、数十ミリ秒である。
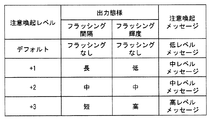
以上、説明した第1実施形態では、第1車両2aに搭載されている車載システム1aが第1車両軌道情報を取得した第1時刻と、第2車両2bに搭載されている車載システム1bが、第1車両軌道情報が含まれている第1車両パケットを受信したと判断された第2時刻との差分である通信遅延時間ΔTに基づいて、デフォルトの注意喚起レベルを維持あるいは変更して注意喚起制御を実行する。
前述の実施形態では、第1車両2aに搭載された車載システム1aは、第1車両2aが交錯点に接近したと判断した場合に、一度のみ、第1車両パケットを送信していた。そして、第2車両2bは、その一度のみ送信された第1車両パケットに基づいて注意喚起制御を実行していた。
前述の実施形態では、車両パケットを受信したと判断した後に、第2時刻となる現在時刻を取得していた。しかし、変形例2では、図8に示すように、S11の前にS15を実行して現在時刻を取得する。したがって、変形例2では、車両パケット受信処理において現在時刻を周期的に取得する。そして、新たな車両パケットを受信したと判断した場合に実行するS16Aでは、S15を実行して繰り返し取得した現在時刻すなわち取得済みの時刻のうちの最新の現在時刻を第2時刻とする。そして、この第2時刻と受信した車両パケットに含まれている第1時刻とから通信遅延時間ΔTを算出する。
前述の実施形態では、自車両が交錯点に接近したと判断した場合に、車両パケットを生成して送信していた。しかし、自車両が交錯点に接近しているか否かを判断せず、周期的に車両パケットを生成して送信してもよい。この場合、図3のS1において、交錯点に接近したか否かを判断することに代えて、車両パケット生成周期となったか否かを判断する。
前述の実施形態では、車両制御部70は、自車両の運転者に対して注意喚起する注意喚起制御を実行していた。しかし、車両制御部70が実行する車両制御は、自車両の車両挙動の自動制御であってもよい。この場合、遅延参酌制御では、遅延非参酌制御における制御量を、通信遅延時間ΔTに基づいて定まる量だけ大きくする。
前述の実施形態では、第1車両2aに搭載された車載システム1aは、第1車両2aの位置が交錯点に接近したと判断した場合に、第1車両情報として、第1車両軌道情報を送信していた。そして、第2車両2bに搭載された車載システム1bは、第2車両2bも交錯点に接近していると判断した場合に、注意喚起制御を実行していた。
前述の実施形態では、狭域通信部20および広域通信部30の2つの通信部を備えていた。しかし、狭域通信部20および広域通信部30のいずれか一方のみを備えていてもよい。
前述の実施形態では、注意喚起レベルが高いほど、注意喚起メッセージが出力されていることに、第2車両2bの運転者が気づきやすくするため、フラッシングを行っていた。しかし、注意喚起メッセージに気づきやすくするための出力態様には、フラッシング以外にも、注意喚起メッセージを表示部に出力する場合、注意喚起メッセージの大きさを変化させる態様がある。
前述の実施形態では、通信遅延時間ΔTに車速を乗じて算出した、通信遅延時間ΔTの間の第1車両2aの移動距離をもとに注意喚起レベルを維持あるいは変更していた。しかし、車速は考慮せず、通信遅延時間ΔTをもとに、注意喚起レベルを維持あるいは変更してもよい。
Claims (10)
- 第1車両(2a)で用いられる第1車両制御装置(1a)と、第2車両(2b)で用いられる第2車両制御装置(1b)とを備える車両制御システム(100)であって、
前記第1車両制御装置は、
前記第2車両が、前記第1車両に対する車両制御を前記第2車両制御装置が開始するための第1車両情報を取得する第1車両情報取得部(401)と、
前記第1車両情報を取得した時刻を表す第1時刻を取得し、前記第1時刻と前記第1車両情報とを含む第1車両パケットを生成する車両パケット生成部(404)と、
前記第1車両パケットを送信する第1車両送信部(21、31)とを備え、
前記第2車両制御装置は、
前記第1車両パケットを受信するための第2車両受信部(22、32)と、
前記第2車両受信部が受信した信号を取得して前記第1車両パケットを受信したか否かを逐次判断する受信判断部(406)と、
前記受信判断部が、前記第1車両パケットを受信したと判断した時刻を表す第2時刻を取得する第2時刻取得部(403)と、
前記第2車両受信部が受信した前記第1車両パケットに含まれている前記第1時刻と、前記第2時刻取得部が取得した前記第2時刻の差分である通信遅延時間を算出する遅延算出部(409)と、
前記第1時刻と前記第2時刻とが同時刻であると仮定した場合に前記第1車両情報に基づいて定まる前記車両制御である遅延非参酌制御を、前記通信遅延時間に基づいて変更した遅延参酌制御を実行する第2車両制御部(70)とを備える車両制御システム。 - 請求項1において、
前記第1車両情報取得部は、前記第1車両情報として、前記第1車両の今後の軌道である第1車両推定軌道を決定するための情報である第1車両軌道情報を取得し、
前記第2車両制御部は、前記第2車両受信部が受信した前記第1車両パケットに含まれている前記第1車両軌道情報に基づいて前記第1車両推定軌道を決定するとともに、前記第2車両の今後の軌道である第2車両推定軌道を決定し、前記第1車両推定軌道および前記第2車両推定軌道に基づいて、前記第1車両と前記第2車両とが衝突する可能性があるか否かを判断し、前記第1車両と前記第2車両とが衝突する可能性があると判断したことに基づいて、前記遅延参酌制御が可能な遅延参酌モードを実行する車両制御システム。 - 請求項2において、
前記第2車両制御部は、前記第1車両と前記第2車両とが衝突する可能性があると判断した場合、前記遅延参酌制御として、前記第2車両の運転者に対して注意喚起する注意喚起制御を実行するものであって、前記注意喚起制御は、前記遅延非参酌制御において定まる注意喚起レベルを、前記通信遅延時間が長いほど高いレベルに変更した内容の注意喚起を実行する制御である車両制御システム。 - 請求項3において、
前記注意喚起制御は、前記遅延非参酌制御において定まる注意喚起レベルを、前記通信遅延時間が長いほど、かつ、前記第1車両の車速が高いほど高いレベルに変更した内容の注意喚起を実行する制御である車両制御システム。 - 請求項3または4において、
前記注意喚起制御は、前記第2車両の運転者に対して注意喚起する注意喚起メッセージを出力するとともに、前記通信遅延時間が長いほど、前記注意喚起メッセージを出力していることに前記第2車両の運転者が気づきやすい出力態様とする制御である車両制御システム。 - 請求項1〜5のいずれか1項において、
前記第2時刻取得部は、時刻を周期的に取得し、前記受信判断部が前記第1車両パケットを受信したと判断した場合に、取得済みの前記時刻のうちの最新の時刻を前記第2時刻とする車両制御システム。 - 請求項2〜5のいずれか1項において、
前記第1車両制御装置は、最新の前記第1車両軌道情報を逐次決定して、最新の前記第1車両軌道情報を含む前記第1車両パケットを逐次送信し、
前記第2車両制御装置は、前記第2車両受信部、前記受信判断部、前記第2時刻取得部、前記遅延算出部を備える通信ユニット(10)と、前記第2車両制御部とが別体で構成され、
前記受信判断部は、前記第1車両パケットを受信しない時間が基準時間を超えた場合に、その旨を示す未受信通知を前記第2車両制御部に通知し、
前記第2車両制御部は、前記第2車両受信部が前記第1車両パケットを逐次受信している状態で前記遅延参酌制御を終了する終了条件を設定し、前記終了条件が成立するまで繰り返し前記遅延参酌モードを実行し、前記終了条件が成立する前に、前記未受信通知を取得したことに基づいて、前記第1車両パケットを受信できない原因が前記第2車両受信部の故障ではないと判断し、かつ、前記遅延参酌モードを終了して、予め設定されたパケット未受信時制御を実行する車両制御システム。 - 請求項2〜5のいずれか1項において、
前記第2車両制御装置は、道路地図を記憶する地図記憶部(62)を備え、
前記第2車両制御部は、前記第1車両推定軌道および前記第2車両推定軌道が交差するか否かを判断し、交差すると判断した場合、前記第1車両推定軌道と前記第2車両推定軌道とが交差する位置が、道路が立体交差する位置であるか否かを、前記地図記憶部に記憶されている前記道路地図に基づいて判断し、前記第1車両推定軌道と前記第2車両推定軌道とが交差する位置が、道路が立体交差する位置でないと判断したことに基づいて、前記第1車両と前記第2車両とが衝突する可能性があると判断する車両制御システム。 - 車両で用いられる車両制御装置であって、
前記車両制御装置が用いられる車両である自車両の周辺に存在する周辺車両が送信したパケットであって、前記周辺車両に対する車両制御を前記車両制御装置が開始するための周辺車両情報と、前記周辺車両情報が生成された時刻を表す第1時刻と含んでいる周辺車両パケットを受信する受信部(22、32)と、
前記受信部が受信した信号を取得して前記周辺車両パケットを受信したか否かを逐次判断する受信判断部(406)と、
前記受信判断部が、前記周辺車両パケットを受信したと判断した時刻を表す第2時刻を取得する第2時刻取得部(403)と、
前記受信部が受信した前記周辺車両パケットに含まれている前記第1時刻と、前記第2時刻取得部が取得した前記第2時刻の差分である通信遅延時間を算出する遅延算出部(409)と、
前記第1時刻と前記第2時刻とが同時刻であると仮定した場合に前記周辺車両情報に基づいて定まる制御である遅延非参酌制御を、前記通信遅延時間に基づいて変更した遅延参酌制御を実行する車両制御部(70)とを備える車両制御装置。 - 車両で用いられる車両制御装置であって、
前記車両制御装置が用いられる車両である自車両の周辺に存在する周辺車両が送信したパケットであって、前記周辺車両に対する車両制御を前記車両制御装置が開始するための周辺車両情報と、前記周辺車両情報が生成された時刻を表す第1時刻と含んでいる周辺車両パケットを受信する受信部(22、32)と、
前記受信部が受信した信号を取得して前記周辺車両パケットを受信したか否かを逐次判断する受信判断部(406)と、
前記受信判断部が、前記周辺車両パケットを受信したと判断した時刻を表す第2時刻を取得する第2時刻取得部(403)と、
前記受信部が受信した前記周辺車両パケットに含まれている前記第1時刻と、前記第2時刻取得部が取得した前記第2時刻の差分である通信遅延時間を算出する遅延算出部(409)と、
前記遅延算出部が算出した前記通信遅延時間を、前記自車両で用いられ、前記周辺車両情報に基づいて定まる制御を実行する車両制御部へ出力する遅延時間出力部(410)とを備える車両制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095608A JP6540594B2 (ja) | 2016-05-11 | 2016-05-11 | 車両制御システムおよび車両制御装置 |
| EP17795881.6A EP3457381A4 (en) | 2016-05-11 | 2017-04-12 | VEHICLE CONTROL SYSTEM AND VEHICLE CONTROL DEVICE |
| PCT/JP2017/014896 WO2017195520A1 (ja) | 2016-05-11 | 2017-04-12 | 車両制御システムおよび車両制御装置 |
| US16/098,520 US10814869B2 (en) | 2016-05-11 | 2017-04-12 | Vehicle control system and vehicle control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095608A JP6540594B2 (ja) | 2016-05-11 | 2016-05-11 | 車両制御システムおよび車両制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017204152A true JP2017204152A (ja) | 2017-11-16 |
| JP2017204152A5 JP2017204152A5 (ja) | 2018-07-05 |
| JP6540594B2 JP6540594B2 (ja) | 2019-07-10 |
Family
ID=60267087
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016095608A Expired - Fee Related JP6540594B2 (ja) | 2016-05-11 | 2016-05-11 | 車両制御システムおよび車両制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10814869B2 (ja) |
| EP (1) | EP3457381A4 (ja) |
| JP (1) | JP6540594B2 (ja) |
| WO (1) | WO2017195520A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023058306A1 (ja) * | 2021-10-06 | 2023-04-13 | 住友電気工業株式会社 | 車載装置、車載システム、制御方法及びコンピュータプログラム |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6540594B2 (ja) * | 2016-05-11 | 2019-07-10 | 株式会社デンソー | 車両制御システムおよび車両制御装置 |
| CN117022255A (zh) * | 2018-03-20 | 2023-11-10 | 御眼视觉技术有限公司 | 用于主车辆的自动驾驶系统、机器可读存储介质和装置 |
| RU2741818C1 (ru) | 2019-09-04 | 2021-01-28 | Общество с ограниченной ответственностью "АРТИФЛИТ" | Способ формирования энергоэффективного трека транспортного средства, устройство формирования энергоэффективного трека и система формирования энергоэффективного трека |
| US12246594B2 (en) | 2019-09-04 | 2025-03-11 | Limited Liability Company Artifleet | Motor vehicle with a computer device for generating an energy-efficient track for a motor vehicle |
| RU2771591C1 (ru) | 2021-05-14 | 2022-05-06 | Общество С Ограниченной Ответственностью "Омникомм Онлайн" | Пользовательское устройство генерирования графического интерфейса пользователя |
| US12168449B2 (en) | 2021-05-14 | 2024-12-17 | Boris Valerevich PANKOV | Device for generating a graphical user interface and a system for generating a graphical user interface |
| WO2023121516A1 (en) | 2021-12-22 | 2023-06-29 | "Omnicomm Online" Limited Liability Company | Method for generating a modified energy-efficient track for a vehicle |
| CA3249405A1 (en) * | 2022-01-28 | 2023-03-09 | Boris Valerevich PANKOV | GENERATION OF A RESOURCE-EFFICIENT WAY FOR A MOTOR VEHICLE |
| US12516946B2 (en) | 2024-05-16 | 2026-01-06 | Boris Valerevich PANKOV | Method for generating an optimized track for a vehicle and a computer-readable medium |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007176355A (ja) * | 2005-12-28 | 2007-07-12 | Matsushita Electric Ind Co Ltd | 自動運転制御装置、及びそれを搭載した車両 |
| JP2015064733A (ja) * | 2013-09-25 | 2015-04-09 | 日産自動車株式会社 | 運転支援装置及び運転支援方法 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7382274B1 (en) * | 2000-01-21 | 2008-06-03 | Agere Systems Inc. | Vehicle interaction communication system |
| US6985089B2 (en) * | 2003-10-24 | 2006-01-10 | Palo Alto Reserach Center Inc. | Vehicle-to-vehicle communication protocol |
| US20070040700A1 (en) * | 2004-03-24 | 2007-02-22 | Bachelder Aaron D | Cellular-based preemption system |
| JP4650899B2 (ja) * | 2006-10-13 | 2011-03-16 | 三菱電機株式会社 | 安全支援情報提供車載システム |
| JP2008236477A (ja) * | 2007-03-22 | 2008-10-02 | Oki Electric Ind Co Ltd | 通信遅延時間推定方法、通信遅延時間推定プログラム、車載通信器 |
| JP4424425B2 (ja) * | 2008-02-04 | 2010-03-03 | 株式会社デンソー | 車車間通信装置 |
| JP4636094B2 (ja) * | 2008-02-22 | 2011-02-23 | 株式会社デンソー | 車車間通信装置 |
| JP2009286365A (ja) * | 2008-05-30 | 2009-12-10 | Fujitsu Ltd | 情報提供装置、情報提供方法、情報提供プログラム及び情報提供システム |
| JP5347531B2 (ja) * | 2009-01-27 | 2013-11-20 | トヨタ自動車株式会社 | 車両用走行制御装置 |
| US8676466B2 (en) * | 2009-04-06 | 2014-03-18 | GM Global Technology Operations LLC | Fail-safe speed profiles for cooperative autonomous vehicles |
| JP5494332B2 (ja) | 2010-07-27 | 2014-05-14 | トヨタ自動車株式会社 | 車両制御システム |
| JP5668359B2 (ja) * | 2010-08-11 | 2015-02-12 | トヨタ自動車株式会社 | 車両制御装置 |
| JP5553444B2 (ja) | 2010-09-21 | 2014-07-16 | 株式会社デンソー | 車両用表示装置 |
| US8791835B2 (en) * | 2011-10-03 | 2014-07-29 | Wei Zhang | Methods for road safety enhancement using mobile communication device |
| JP2013199223A (ja) * | 2012-03-26 | 2013-10-03 | Denso Corp | 車載電子装置 |
| JP6248419B2 (ja) * | 2013-05-29 | 2017-12-20 | 株式会社デンソー | 緊急通報システム |
| JP5820964B2 (ja) * | 2014-03-28 | 2015-11-24 | パナソニックIpマネジメント株式会社 | 無線装置 |
| JP6213779B2 (ja) * | 2014-04-14 | 2017-10-18 | パナソニックIpマネジメント株式会社 | 無線装置 |
| JP6375772B2 (ja) * | 2014-08-11 | 2018-08-22 | 株式会社デンソー | 通報システム、情報処理システム、サーバ装置、端末装置、及びプログラム |
| JP6323248B2 (ja) * | 2014-08-11 | 2018-05-16 | 株式会社デンソー | 情報処理システム、端末装置、及びプログラム |
| JP6241751B2 (ja) * | 2014-11-20 | 2017-12-06 | パナソニックIpマネジメント株式会社 | 端末装置 |
| JP5880904B1 (ja) * | 2014-11-20 | 2016-03-09 | パナソニックIpマネジメント株式会社 | 端末装置 |
| JP6160840B2 (ja) * | 2014-12-02 | 2017-07-12 | パナソニックIpマネジメント株式会社 | 無線装置 |
| JP6540594B2 (ja) * | 2016-05-11 | 2019-07-10 | 株式会社デンソー | 車両制御システムおよび車両制御装置 |
-
2016
- 2016-05-11 JP JP2016095608A patent/JP6540594B2/ja not_active Expired - Fee Related
-
2017
- 2017-04-12 WO PCT/JP2017/014896 patent/WO2017195520A1/ja not_active Ceased
- 2017-04-12 EP EP17795881.6A patent/EP3457381A4/en not_active Ceased
- 2017-04-12 US US16/098,520 patent/US10814869B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007176355A (ja) * | 2005-12-28 | 2007-07-12 | Matsushita Electric Ind Co Ltd | 自動運転制御装置、及びそれを搭載した車両 |
| JP2015064733A (ja) * | 2013-09-25 | 2015-04-09 | 日産自動車株式会社 | 運転支援装置及び運転支援方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023058306A1 (ja) * | 2021-10-06 | 2023-04-13 | 住友電気工業株式会社 | 車載装置、車載システム、制御方法及びコンピュータプログラム |
| JPWO2023058306A1 (ja) * | 2021-10-06 | 2023-04-13 | ||
| JP7747054B2 (ja) | 2021-10-06 | 2025-10-01 | 住友電気工業株式会社 | 車載装置、車載システム、制御方法及びコンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017195520A1 (ja) | 2017-11-16 |
| EP3457381A4 (en) | 2020-03-04 |
| JP6540594B2 (ja) | 2019-07-10 |
| EP3457381A1 (en) | 2019-03-20 |
| US10814869B2 (en) | 2020-10-27 |
| US20190152474A1 (en) | 2019-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6540594B2 (ja) | 車両制御システムおよび車両制御装置 | |
| US10542379B2 (en) | On-vehicle communication device, communication control method and vehicle | |
| CN105991151B (zh) | 共享的车辆相机 | |
| JP4073022B2 (ja) | 車載装置及び他車位置算出方法 | |
| US10616733B2 (en) | Communication control device | |
| JP6520781B2 (ja) | 通信制御装置 | |
| JP2000090395A (ja) | 車両間通信の送信装置及び方法 | |
| US9282485B2 (en) | Terminal apparatus for transferring signal containing predetermined information and communication system | |
| JP5935818B2 (ja) | 車両用無線機及び通信システム | |
| JP6447554B2 (ja) | 移動体間通信システムおよび移動体用受信制御装置 | |
| JP2010198260A (ja) | 安全運転支援システムおよび車載端末 | |
| CN103081540A (zh) | 无线装置 | |
| JP5211784B2 (ja) | 通信システム | |
| JP5104372B2 (ja) | 車車間通信システム、車車間通信装置 | |
| US10104678B2 (en) | Wireless communication device | |
| WO2012114568A1 (ja) | 移動体通信装置、端末装置、基地局装置、送信制御方法、通信制御方法 | |
| JP2003272095A (ja) | 車両用通信装置 | |
| JP2020064411A (ja) | 運転支援システム | |
| JP2007060289A (ja) | 通信システム及び車載通信端末 | |
| JP6904311B2 (ja) | 車車間通信システム、車両用通信装置 | |
| JP6493045B2 (ja) | 車両用無線通信装置および無線通信システム | |
| WO2014002485A1 (ja) | 無線装置 | |
| JP5741525B2 (ja) | 車両用無線通信装置および車車間情報通信システム | |
| JP2017184225A (ja) | 端末装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180523 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190527 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6540594 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |