JP2017206063A - 遠隔操作調査装置 - Google Patents
遠隔操作調査装置 Download PDFInfo
- Publication number
- JP2017206063A JP2017206063A JP2016098197A JP2016098197A JP2017206063A JP 2017206063 A JP2017206063 A JP 2017206063A JP 2016098197 A JP2016098197 A JP 2016098197A JP 2016098197 A JP2016098197 A JP 2016098197A JP 2017206063 A JP2017206063 A JP 2017206063A
- Authority
- JP
- Japan
- Prior art keywords
- tubular member
- cable
- probe
- investigation device
- roller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Monitoring And Testing Of Nuclear Reactors (AREA)
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【解決手段】遠隔操作調査装置1は、原子炉格納容器90の内部空間Sを移動可能な探査機10と、探査機10に接続され、探査機10に対して信号を伝送するケーブル3と、ケーブル3に外挿され、ケーブル3に沿って移動可能に設けられた管状部材30と、を備える。管状部材30の内面には、複数の凹凸が管状部材30の延在方向に沿って形成されている。
【選択図】図1
Description
また、遠隔操作調査装置に、管状部材を空間に送り込む機構と、ケーブルを空間に送り込む機構と、をそれぞれ設ける必要がない。したがって、簡素な構成の遠隔操作調査装置を提供できる。
また、ケーブルを搬送可能な第2搬送手段が管状部材に対して固定されているので、第2搬送手段によりケーブルを搬送する際に、第2搬送手段と管状部材との間でケーブルを撓ませることなく、管状部材の内部を通るケーブルを搬送することができる。このため、ケーブルを空間に確実に送り込むことができるので、探査機がケーブルを牽引することによる探査機の推進力不足が生じることを抑制できる。したがって、探査機を目標位置まで確実に移動させることができる。
[第1実施形態]
最初に第1実施形態の遠隔操作調査装置1について説明する。
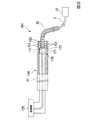
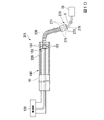
図1は、第1実施形態に係る遠隔操作調査装置が原子炉格納容器に配置された状態を示す模式図である。図2は、第1実施形態に係る遠隔操作調査装置の概略構成図である。
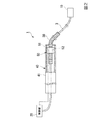
図1および図2に示すように、第1実施形態の遠隔操作調査装置1は、原子炉格納容器90に貫通形成された導通路91を通じて、原子炉格納容器90の外部から内部空間Sを調査するために用いられる。遠隔操作調査装置1は、原子炉格納容器90の内部空間Sにおける水中を移動可能な探査機10と、探査機10の運転を制御する制御部20と、探査機10と制御部20との間に接続されたケーブル3と、ケーブル3に外挿され、ケーブル3に沿って移動可能に設けられた管状部材30と、管状部材30の搬送を担う導入装置40と、を備えている。
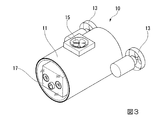
図3に示すように、探査機10は、いわゆるROV(Remotely Operated Vehicle)等である。探査機10は、本体11や、本体11に設けられた第1推進機構13、第2推進機構15および撮像部17等を備えている。
第2推進機構15は、本体11の上部に設けられたスクリューを備えている。第2推進機構15のスクリューは、探査機10の上下方向への推進を可能としている。
撮像部17は、探査機10の前方を照射する照明、および探査機10の前方を撮影するカメラ(いずれも不図示)を含んでいる。
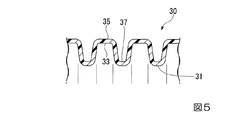
図4および図5に示すように、管状部材30は、柔軟性を有する円管状のコルゲートチューブである。コルゲートチューブとは、波形の縦断面形状を有することにより潰れを抑制しつつ柔軟に変形可能とされた中空のチューブである。管状部材30は、管状部材30に挿通されたケーブル3(図2参照)との間の摩擦力を低減させるべく、硬質な樹脂材料により形成されていることが好ましく、例えばポリオレフィンやポリスチレン、アクリル樹脂等の熱可塑性樹脂が好適である。ポリオレフィンとしては、例えばポリプロピレンやポリエチレン等を用いることができ、本実施形態では、管状部材30は、ポリプロピレンにより形成されている。管状部材30の厚さは、管状部材30の外径と比べて十分に薄く形成されている。管状部材30の内径は、ケーブル3の外径よりも大きくなっている。管状部材30の長さについては後述する。
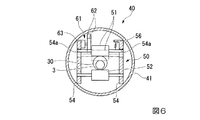
図6に示すように、搬送手段50は、管状部材30を挟み込む第1ローラ51および第2ローラ52と、第1ローラ51および第2ローラ52を回転可能に軸支する支持部材54と、第1ローラ51を第2ローラ52から離間する方向に付勢する付勢部材56と、第2ローラ52を回転駆動する図示しないローラ駆動源と、を有する。
ローラ駆動源(不図示)は、例えばモータ等であって、上述した制御部20(図2参照)に接続されて、制御部20から送られた信号に基づいて駆動する。
この構成によれば、管状部材30がケーブル3に外挿されているので、探査機10の移動目標位置までの経路上に障害物93が存在する場合に、管状部材30が障害物93に接触することで、ケーブル3が障害物93に接触することを防止できる。そして、管状部材30は、ケーブル3に沿って移動可能に設けられているので、探査機10を移動させる際に、管状部材30を障害物93に接触させた状態で、ケーブル3を障害物93に対して摺動させることなく移動させることができる。これにより、ケーブル3と障害物93との間の摩擦力の発生を防止でき、探査機10の移動が制限されることを抑制できる。したがって、探査機10を目標位置まで確実に移動させることができる。
また、遠隔操作調査装置1に、管状部材30を原子炉格納容器90の内部空間Sに送り込む機構と、ケーブル3を原子炉格納容器90の内部空間Sに送り込む機構と、をそれぞれ設ける必要がない。したがって、簡素な構成の遠隔操作調査装置1を提供できる。
次に第2実施形態の遠隔操作調査装置101について説明する。
図7および図8は、第2実施形態に係る遠隔操作調査装置の概略構成図である。図7では、後述する第1搬送手段150により管状部材30を原子炉格納容器90の内部空間Sに送り込んでいる状態を示している。図8は、第1搬送手段150による管状部材30の原子炉格納容器90の内部空間Sへの送り込みが完了後、第2搬送手段170によりケーブル3を原子炉格納容器90の内部空間Sに送り込んでいる状態を示している。
導入装置140は、管状部材30を原子炉格納容器90の内部空間S(図1参照)に送り込む第1搬送手段150を備えている。第1搬送手段150は、管状部材30を挟み込む複数のローラ151と、ローラ151を回転駆動する図示しない第1ローラ駆動源と、を有する。複数のローラ151は、ベース部材41の先端の内部に配置されている。第1ローラ駆動源は、制御部120に接続されて、制御部120から送られた信号に基づいて駆動する。複数のローラ151は、管状部材30を挟み込んだ状態で、第1ローラ駆動源の駆動に基づいて回転することで、管状部材30をその延在方向に沿って搬送することができる。
また、ケーブル3を搬送可能な第2搬送手段170が管状部材30に対して固定されているので、第2搬送手段170によりケーブル3を搬送する際に、第2搬送手段170と管状部材30との間でケーブル3を撓ませることなく、管状部材30の内部を通るケーブル3を搬送することができる。このため、ケーブル3を原子炉格納容器90の内部空間Sに確実に送り込むことができるので、探査機10がケーブル3を牽引することによる探査機10の推進力不足が生じることを抑制できる。したがって、探査機10を目標位置まで確実に移動させることができる。
次に第2実施形態の遠隔操作調査装置201について説明する。
図9および図10は、第2実施形態の変形例に係る遠隔操作調査装置の概略構成図である。図9では、第1搬送手段150により管状部材230を原子炉格納容器90の内部空間Sに送り込んでいる状態を示している。図10は、第1搬送手段150による管状部材230の原子炉格納容器90の内部空間Sへの送り込みが完了後、第2搬送手段270によりケーブル3を原子炉格納容器90の内部空間Sに送り込んでいる状態を示している。
図7および図8に示す第2実施形態では、第2搬送手段170が管状部材30の後端部に設けられている。これに対して図9に示す第2実施形態の変形例では、第2搬送手段270が管状部材230の先端部に設けられている点で、第2実施形態と異なっている。
図11は、管状部材の変形例の説明図であり、管状部材の拡大断面図である。
図11に示すように、管状部材330は、管状の本体部330aと、本体部330aの内面に配置された膜状の摩擦低減部330bと、を備えている。本体部330aは、第1実施形態の管状部材30と同様に形成されている。摩擦低減部330bは、管状部材330に挿通されたケーブル3(図2参照)との間の摩擦力を低減させるべく、例えばポリテトラフルオロエチレン等のフッ素樹脂により形成されている。
Claims (8)
- 空間を移動可能な探査機と、
前記探査機に接続され、前記探査機に対して信号を伝送するケーブルと、
前記ケーブルに外挿され、前記ケーブルに沿って移動可能に設けられた管状部材と、
を備えることを特徴とする遠隔操作調査装置。 - 前記管状部材の内面には、複数の凹凸が前記管状部材の延在方向に沿って形成されている、
ことを特徴とする請求項1に記載の遠隔操作調査装置。 - 前記管状部材の内面には、前記管状部材の径方向における前記管状部材の外側から内側に向かって先細る複数の凸部が形成されている、
ことを特徴とする請求項2に記載の遠隔操作調査装置。 - 前記管状部材は、コルゲートチューブである、
ことを特徴とする請求項2または3に記載の遠隔操作調査装置。 - 前記管状部材は、
管状の本体部と、
前記本体部の内面に配置され、フッ素樹脂により形成された摩擦低減部と、
を備える、
ことを特徴とする請求項1から4のいずれか1項に記載の遠隔操作調査装置。 - 前記空間にアクセス可能な導通路に対して固定され、前記管状部材を挟み込んで前記空間に送り込むことが可能な複数のローラを備え、
前記複数のローラは、前記管状部材の径方向に沿う位置を変更可能に設けられ、前記管状部材の径方向に沿う位置を変更することで、前記ケーブルを挟み込んで前記空間に送り込むことが可能となっている、
ことを特徴とする請求項1から5のいずれか1項に記載の遠隔操作調査装置。 - 前記空間にアクセス可能な導通路に対して固定され、前記管状部材を前記空間に送り込むことが可能な第1搬送手段と、
前記管状部材に対して固定され、前記ケーブルを前記空間に向かって搬送可能な第2搬送手段と、
を備えることを特徴とする請求項1から5のいずれか1項に記載の遠隔操作調査装置。 - 前記管状部材の前記探査機側の端部には、前記第2搬送手段が設けられ、
前記第2搬送手段は、前記管状部材とは反対側を撮影可能な画像取得手段を備える、
ことを特徴とする請求項7に記載の遠隔操作調査装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016098197A JP6874278B2 (ja) | 2016-05-16 | 2016-05-16 | 遠隔操作調査装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016098197A JP6874278B2 (ja) | 2016-05-16 | 2016-05-16 | 遠隔操作調査装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017206063A true JP2017206063A (ja) | 2017-11-24 |
| JP6874278B2 JP6874278B2 (ja) | 2021-05-19 |
Family
ID=60414670
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016098197A Active JP6874278B2 (ja) | 2016-05-16 | 2016-05-16 | 遠隔操作調査装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6874278B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019132611A (ja) * | 2018-01-29 | 2019-08-08 | 日立Geニュークリア・エナジー株式会社 | 調査システム及び調査方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58146955U (ja) * | 1982-03-30 | 1983-10-03 | 株式会社明電舎 | 遠隔点検装置 |
| JPS60177261A (ja) * | 1984-02-24 | 1985-09-11 | Power Reactor & Nuclear Fuel Dev Corp | セル内点検装置の走行装置 |
| JPH06123402A (ja) * | 1992-10-13 | 1994-05-06 | Babcock Hitachi Kk | 配管内検査走行装置 |
| JPH08146186A (ja) * | 1994-11-21 | 1996-06-07 | Toshiba Corp | 原子炉内構造物検査装置および検査方法 |
| JP2001281382A (ja) * | 2000-03-31 | 2001-10-10 | Hitachi Ltd | 挿入式遠隔点検システム |
| JP2003328103A (ja) * | 2002-05-09 | 2003-11-19 | Ms Engineering Kk | 溶射装置 |
| JP2007085814A (ja) * | 2005-09-21 | 2007-04-05 | Mitsubishi Heavy Ind Ltd | 検査装置及びその搬入装置 |
| US20150274260A1 (en) * | 2014-02-20 | 2015-10-01 | Woods Hole Oceanographic Institution | Mechanical tether system for a submersible vehicle |
-
2016
- 2016-05-16 JP JP2016098197A patent/JP6874278B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58146955U (ja) * | 1982-03-30 | 1983-10-03 | 株式会社明電舎 | 遠隔点検装置 |
| JPS60177261A (ja) * | 1984-02-24 | 1985-09-11 | Power Reactor & Nuclear Fuel Dev Corp | セル内点検装置の走行装置 |
| JPH06123402A (ja) * | 1992-10-13 | 1994-05-06 | Babcock Hitachi Kk | 配管内検査走行装置 |
| JPH08146186A (ja) * | 1994-11-21 | 1996-06-07 | Toshiba Corp | 原子炉内構造物検査装置および検査方法 |
| JP2001281382A (ja) * | 2000-03-31 | 2001-10-10 | Hitachi Ltd | 挿入式遠隔点検システム |
| JP2003328103A (ja) * | 2002-05-09 | 2003-11-19 | Ms Engineering Kk | 溶射装置 |
| JP2007085814A (ja) * | 2005-09-21 | 2007-04-05 | Mitsubishi Heavy Ind Ltd | 検査装置及びその搬入装置 |
| US20150274260A1 (en) * | 2014-02-20 | 2015-10-01 | Woods Hole Oceanographic Institution | Mechanical tether system for a submersible vehicle |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019132611A (ja) * | 2018-01-29 | 2019-08-08 | 日立Geニュークリア・エナジー株式会社 | 調査システム及び調査方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6874278B2 (ja) | 2021-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11846095B2 (en) | High frequency AC-powered drain cleaning and inspection apparatus and methods | |
| US8141442B2 (en) | Pipe scanner | |
| US10898931B2 (en) | Flexible cleaning lance positioner guide apparatus | |
| CN211828151U (zh) | 传热管检查装置 | |
| JP4613352B2 (ja) | 内視鏡システムの推進機構 | |
| CN107923564B (zh) | 非破坏性管道检查装置 | |
| US9927060B2 (en) | Vehicle for navigating within an enclosed space | |
| US20120190924A1 (en) | Flexible Tubular Interlocking Structure for a Handheld Endoscope | |
| JP5574861B2 (ja) | 配管減肉測定装置 | |
| JP2017206063A (ja) | 遠隔操作調査装置 | |
| KR101681310B1 (ko) | 웜타입 이동로봇, 이를 운용하는 방법 및 이를 포함하는 모니터링 시스템 | |
| JP2004261903A (ja) | ケーブルロボットのケーブル繰り出し・巻上げ装置 | |
| JP6974825B2 (ja) | ケーブル撤去方法 | |
| JP5078645B2 (ja) | 管内走行装置 | |
| JPH05157879A (ja) | 環状異物の探査及び回収装置 | |
| US20200382714A1 (en) | Multi-positioning camera system and camera system | |
| US11371641B2 (en) | Cable management apparatus and system | |
| US20170202434A1 (en) | Insertion device | |
| JP5878846B2 (ja) | 狭隘部進入調査装置 | |
| JP6971689B2 (ja) | 移動型x線診断装置 | |
| KR101674035B1 (ko) | 감마선 조사기의 케이블 이송장치 | |
| JP2004121716A (ja) | X線ct装置 | |
| JP5684512B2 (ja) | 移動ロボット | |
| JPH0933824A (ja) | 管内検査装置及び管内検査方法 | |
| JP6391923B2 (ja) | 移動型x線診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181026 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200303 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200923 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210323 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210405 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6874278 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |