JP2017207368A - 速度検出装置 - Google Patents
速度検出装置 Download PDFInfo
- Publication number
- JP2017207368A JP2017207368A JP2016099849A JP2016099849A JP2017207368A JP 2017207368 A JP2017207368 A JP 2017207368A JP 2016099849 A JP2016099849 A JP 2016099849A JP 2016099849 A JP2016099849 A JP 2016099849A JP 2017207368 A JP2017207368 A JP 2017207368A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- range
- relative
- observation range
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/581—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of interrupted pulse modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/582—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of interrupted pulse modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/932—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles using own vehicle data, e.g. ground speed, steering wheel direction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Signal Processing (AREA)
- Radar Systems Or Details Thereof (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
<構成>
まず、図1を参照して、レーダ装置1の構成について説明する。レーダ装置1は、発振器11と、増幅器12と、分配器14と、送信アンテナ16と、受信アンテナ部20と、受信スイッチ21と、増幅器22と、ミキサ23と、フィルタ24と、A/D変換器25と、を備え、車両に搭載されたミリ波レーダである。
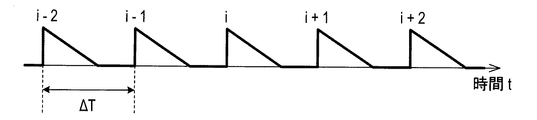
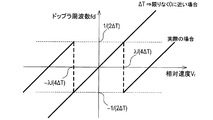
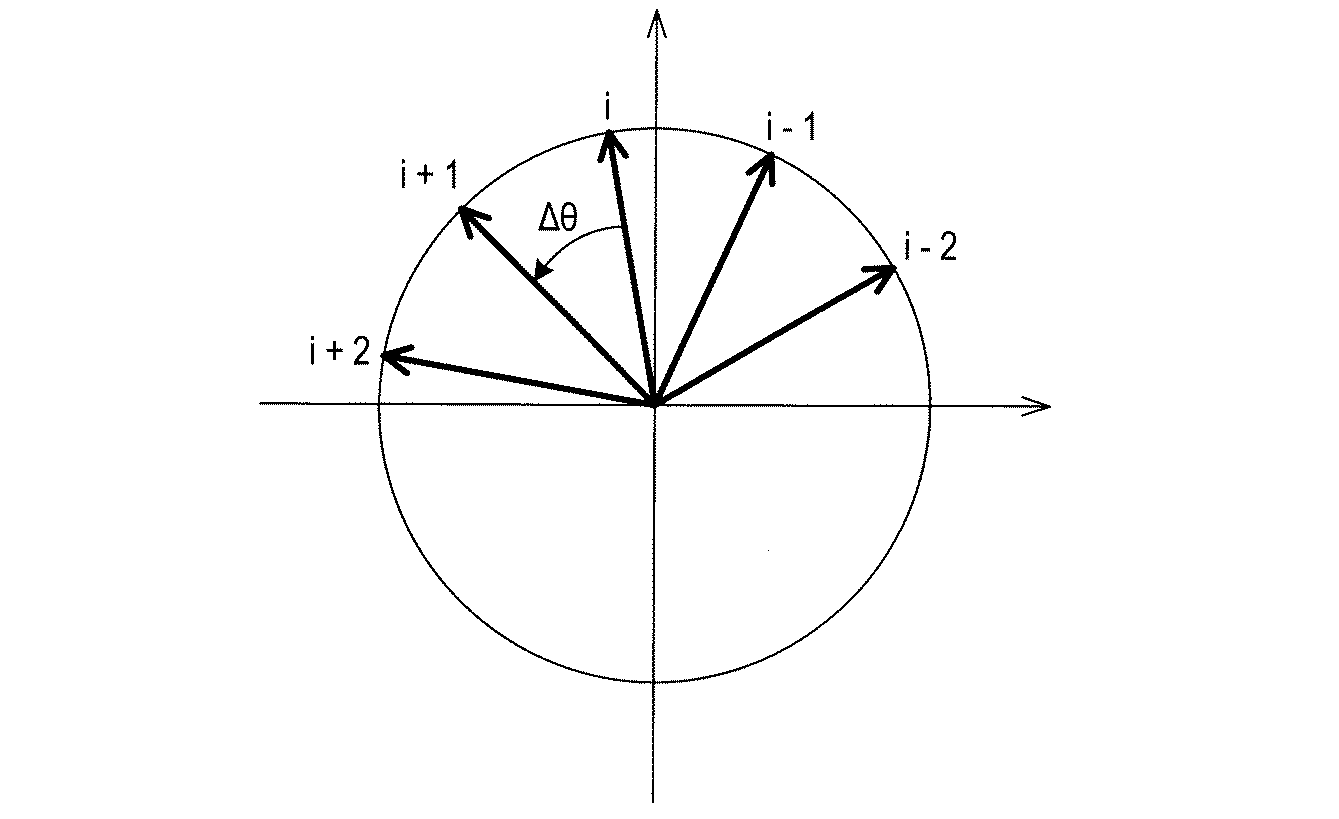
次に、相対速度Vrの折り返しについて説明する。ここでは、パルスi−2〜i+2から、相対速度Vrを算出する場合について説明する。
次に、観測範囲Rgの設定の仕方について説明する。図5に、設定した観測範囲Rgを示す。相対速度Vr=物標の速度−自車速度Vsとしており、物標の速度が自車速度Vsと同じ向きで自車速度Vsよりも大きい場合に、正の値となっている。通常、自車速度Vsに応じて、どのような相対速度Vrを持った物標を注意すべきかが決まるため、自車速度Vsに応じて、観測範囲Rgを限定する。詳しくは、次の(1)〜(3)の条件を満たすように、観測範囲Rgを設定する。さらに、ナイキスト数を一意に決めるために、観測範囲Rgは、ナイキスト速度Vnの2倍となる幅よりも小さい範囲に設定する。
次に、物標の相対速度Vrを検出する処理手順について、図6のフローチャートを参照して説明する。本処理手順は、IF信号が検出される都度、処理装置10が実行する。
続いて、ステップS20では、車速センサ50の測定値から自車速度Vsを検出する。
続いて、ステップS60では、ステップS50で検出した測定値Vdと式(4)とから、相対速度Vrの候補値を算出する。例えば、ナイキスト数を−5〜5として、相対速度Vrの候補値を複数算出する。
以上説明した本実施形態によれば、以下の効果が得られる。
(1)観測範囲Rgを、自車速度Vsに応じた範囲で、且つナイキスト速度Vnの2倍となる幅よりも小さい範囲に設定したことにより、1種類の周期ΔTを用いて、観測対象として適切な物標の相対速度Vrを一意に検出することができる。
(3)自車速度Vsが大きいほど、観測範囲Rgの上限値を小さくすることで、観測対象として不適切な物標を観測範囲Rgから除外し、観測範囲Rgを効率的に設定することができる。特に、自車速度Vsが大きいほど、静止物の相対速度Vrの大きさが大きくなるので、観測範囲Rgの下限値を小さくしなければならないが、上限値を小さくすることで、相対速度Vrが一意に決まる範囲内に下限値を収めることができる。
以上、本発明を実施するための形態について説明したが、本発明は上述の実施形態に限定されることなく、種々変形して実施することができる。
Claims (4)
- 一定の幅のパルス状に変調され且つ一定の周期で繰り返す送信信号に基づくレーダ波を送信し、前記レーダ波を反射した物標からの反射波を受信する車載レーダ(1)により受信された受信信号から、前記車載レーダが搭載された車両に対する前記物標の相対速度を検出する速度検出装置(10)であって、
前記車両の自車速度を検出する速度検出部(S20)と、
前記受信信号に含まれるパルス同士の位相差に応じた前記相対速度の候補を検出する候補検出部(S30〜S60)と、
前記相対速度の観測範囲を、前記速度検出部により検出された前記自車速度に応じた範囲で、且つ、前記パルスの繰り返し周期に応じたナイキスト速度の2倍となる幅よりも小さい範囲に設定する範囲設定部(S70)と、
前記候補検出部により検出された前記相対速度の候補のうち、前記範囲設定部により設定された前記観測範囲に入る候補を前記相対速度として選択する選択部(S80)と、を備える、速度検出装置。 - 前記範囲設定部は、前記速度検出部により取得された前記自車速度が予め設定された速度閾値よりも小さい場合は、前記観測範囲を予め設定された基準範囲よりも狭く設定する、または、自車速度Vsが小さいほど、前記観測範囲が狭くなるように設定した、請求項1に記載の速度検出装置。
- 前記範囲設定部は、前記速度検出部により取得された前記自車速度が大きいほど、前記観測範囲の上限値を小さく設定する、請求項1又は2に記載の速度検出装置。
- 前記範囲設定部は、前記観測範囲を、前記自車速度を負にした値に等しい前記相対速度が入るように設定する、請求項1〜3のいずれか1項に記載の速度検出装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016099849A JP6500838B2 (ja) | 2016-05-18 | 2016-05-18 | 速度検出装置 |
| US16/302,256 US10871557B2 (en) | 2016-05-18 | 2017-05-18 | Velocity detection apparatus |
| PCT/JP2017/018666 WO2017200041A1 (ja) | 2016-05-18 | 2017-05-18 | 速度検出装置 |
| DE112017002559.1T DE112017002559T5 (de) | 2016-05-18 | 2017-05-18 | Geschwindigkeitserfassungsvorrichtung |
| CN201780030467.2A CN109154652B (zh) | 2016-05-18 | 2017-05-18 | 速度检测装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016099849A JP6500838B2 (ja) | 2016-05-18 | 2016-05-18 | 速度検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017207368A true JP2017207368A (ja) | 2017-11-24 |
| JP6500838B2 JP6500838B2 (ja) | 2019-04-17 |
Family
ID=60325948
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016099849A Active JP6500838B2 (ja) | 2016-05-18 | 2016-05-18 | 速度検出装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10871557B2 (ja) |
| JP (1) | JP6500838B2 (ja) |
| CN (1) | CN109154652B (ja) |
| DE (1) | DE112017002559T5 (ja) |
| WO (1) | WO2017200041A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019045365A (ja) * | 2017-09-05 | 2019-03-22 | 三菱電機株式会社 | レーダ装置 |
| JP2020030140A (ja) * | 2018-08-23 | 2020-02-27 | 株式会社デンソーテン | 物標検出装置および物標検出方法 |
| JP2020139776A (ja) * | 2019-02-27 | 2020-09-03 | 沖電気工業株式会社 | Fmcw方式レーダ装置 |
| JP2020148745A (ja) * | 2019-03-15 | 2020-09-17 | 株式会社Soken | 物体追跡装置 |
| JP2021063726A (ja) * | 2019-10-15 | 2021-04-22 | 株式会社Soken | 物体追跡装置 |
| JP2022091352A (ja) * | 2020-12-09 | 2022-06-21 | 古河電気工業株式会社 | レーダー処理装置及びレーダー処理方法 |
| JP2022167685A (ja) * | 2021-04-23 | 2022-11-04 | Jrcモビリティ株式会社 | Fmcwレーダ信号処理装置及びfmcwレーダ信号処理プログラム |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3951429A4 (en) * | 2019-03-28 | 2022-06-01 | Sony Semiconductor Solutions Corporation | SIGNAL PROCESSING DEVICE, SIGNAL PROCESSING METHOD, PROGRAM AND INFORMATION PROCESSING DEVICE |
| CN112444803B (zh) * | 2019-08-29 | 2024-02-27 | 比亚迪股份有限公司 | 车载雷达的目标检测方法和检测装置、车辆 |
| CN112444802B (zh) * | 2019-08-29 | 2024-06-18 | 比亚迪股份有限公司 | 车载雷达的目标检测方法和检测装置、车辆 |
| US11592548B2 (en) * | 2019-09-27 | 2023-02-28 | Intel Corporation | Methods and apparatus to improve doppler velocity estimation |
| CN115980736A (zh) * | 2022-12-15 | 2023-04-18 | 成都晨电智能科技有限公司 | Fmcw雷达扩展测速方法、测速系统及车尾警示装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06242234A (ja) * | 1993-02-19 | 1994-09-02 | Nissan Motor Co Ltd | 車両近接警報装置 |
| JP2005173806A (ja) * | 2003-12-09 | 2005-06-30 | Nissan Motor Co Ltd | 先行車両検出装置、自車両制御装置及び先行車両検出方法 |
| WO2011007828A1 (ja) * | 2009-07-16 | 2011-01-20 | 国立大学法人 千葉大学 | Fm-cwレーダ装置、ドップラ速度測定方法 |
| JP2011149871A (ja) * | 2010-01-22 | 2011-08-04 | Toshiba Corp | 周波数検出器、この周波数検出器を備える合成帯域レーダ、及び飛翔体誘導装置 |
| JP2016003873A (ja) * | 2014-06-13 | 2016-01-12 | 株式会社デンソー | レーダ装置 |
| JP2016075524A (ja) * | 2014-10-03 | 2016-05-12 | 株式会社デンソー | レーダ装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5027122A (en) * | 1990-03-12 | 1991-06-25 | Raytheon Company | Method and apparatus for doppler velocity de-aliasing |
| US7053813B1 (en) * | 2004-04-22 | 2006-05-30 | University Corporation For Atmospheric Research | Radar system |
| FR2886737B1 (fr) * | 2005-06-02 | 2007-09-07 | Meteo France Etablissement Pub | Procede de mesure de la vitesse de l'air par radar doppler |
| US7504989B2 (en) * | 2006-08-09 | 2009-03-17 | Fujitsu Ten Limited | On-vehicle radar device |
| US7605744B1 (en) * | 2008-06-03 | 2009-10-20 | Vaisala Oyj | Method for extension of unambiguous range and velocity of a weather radar |
| DE102009057191A1 (de) * | 2009-12-05 | 2011-06-09 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum eindeutigen Bestimmen einer Entfernung und/oder einer relativen Geschwindigkeit eines Objektes, Fahrerassistenzeinrichtung und Kraftfahrzeug |
| JP5811804B2 (ja) * | 2011-11-24 | 2015-11-11 | トヨタ自動車株式会社 | 車両用周辺監視装置 |
| JP6075846B2 (ja) * | 2012-10-30 | 2017-02-08 | 古野電気株式会社 | レーダ装置、及び速度算出方法 |
| JP6369035B2 (ja) * | 2013-02-05 | 2018-08-08 | 株式会社デンソー | 物標検出装置 |
| US20150070207A1 (en) * | 2013-09-06 | 2015-03-12 | Valeo Radar Systems, Inc. | Method and Apparatus For Self Calibration of A Vehicle Radar System |
| JP6511253B2 (ja) | 2014-11-25 | 2019-05-15 | 日本光電工業株式会社 | 生体情報表示装置 |
-
2016
- 2016-05-18 JP JP2016099849A patent/JP6500838B2/ja active Active
-
2017
- 2017-05-18 DE DE112017002559.1T patent/DE112017002559T5/de active Pending
- 2017-05-18 CN CN201780030467.2A patent/CN109154652B/zh active Active
- 2017-05-18 US US16/302,256 patent/US10871557B2/en active Active
- 2017-05-18 WO PCT/JP2017/018666 patent/WO2017200041A1/ja not_active Ceased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06242234A (ja) * | 1993-02-19 | 1994-09-02 | Nissan Motor Co Ltd | 車両近接警報装置 |
| JP2005173806A (ja) * | 2003-12-09 | 2005-06-30 | Nissan Motor Co Ltd | 先行車両検出装置、自車両制御装置及び先行車両検出方法 |
| WO2011007828A1 (ja) * | 2009-07-16 | 2011-01-20 | 国立大学法人 千葉大学 | Fm-cwレーダ装置、ドップラ速度測定方法 |
| JP2011149871A (ja) * | 2010-01-22 | 2011-08-04 | Toshiba Corp | 周波数検出器、この周波数検出器を備える合成帯域レーダ、及び飛翔体誘導装置 |
| JP2016003873A (ja) * | 2014-06-13 | 2016-01-12 | 株式会社デンソー | レーダ装置 |
| JP2016075524A (ja) * | 2014-10-03 | 2016-05-12 | 株式会社デンソー | レーダ装置 |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019045365A (ja) * | 2017-09-05 | 2019-03-22 | 三菱電機株式会社 | レーダ装置 |
| JP2020030140A (ja) * | 2018-08-23 | 2020-02-27 | 株式会社デンソーテン | 物標検出装置および物標検出方法 |
| JP2020139776A (ja) * | 2019-02-27 | 2020-09-03 | 沖電気工業株式会社 | Fmcw方式レーダ装置 |
| CN113631950A (zh) * | 2019-03-15 | 2021-11-09 | 株式会社电装 | 物体追踪装置 |
| WO2020189419A1 (ja) * | 2019-03-15 | 2020-09-24 | 株式会社デンソー | 物体追跡装置 |
| JP2020148745A (ja) * | 2019-03-15 | 2020-09-17 | 株式会社Soken | 物体追跡装置 |
| JP7116000B2 (ja) | 2019-03-15 | 2022-08-09 | 株式会社Soken | 物体追跡装置 |
| CN113631950B (zh) * | 2019-03-15 | 2024-02-23 | 株式会社电装 | 物体追踪装置 |
| JP2021063726A (ja) * | 2019-10-15 | 2021-04-22 | 株式会社Soken | 物体追跡装置 |
| JP7351706B2 (ja) | 2019-10-15 | 2023-09-27 | 株式会社Soken | 物体追跡装置 |
| JP2022091352A (ja) * | 2020-12-09 | 2022-06-21 | 古河電気工業株式会社 | レーダー処理装置及びレーダー処理方法 |
| JP2022167685A (ja) * | 2021-04-23 | 2022-11-04 | Jrcモビリティ株式会社 | Fmcwレーダ信号処理装置及びfmcwレーダ信号処理プログラム |
| JP7620488B2 (ja) | 2021-04-23 | 2025-01-23 | Jrcモビリティ株式会社 | Fmcwレーダ信号処理装置及びfmcwレーダ信号処理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017200041A1 (ja) | 2017-11-23 |
| CN109154652B (zh) | 2022-12-13 |
| US20190120953A1 (en) | 2019-04-25 |
| US10871557B2 (en) | 2020-12-22 |
| CN109154652A (zh) | 2019-01-04 |
| JP6500838B2 (ja) | 2019-04-17 |
| DE112017002559T5 (de) | 2019-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6500838B2 (ja) | 速度検出装置 | |
| US9354304B2 (en) | Method for cyclically measuring distances and velocities of objects using an FMCW radar sensor | |
| US6888494B2 (en) | FMCW radar system | |
| JP4724694B2 (ja) | 電波レーダ装置 | |
| EP3124994B1 (en) | Vehicle radar device | |
| JP5990761B2 (ja) | レーダ装置 | |
| CN100538395C (zh) | 用于多个目标的间距和相对速度测量的方法和装置 | |
| JP6716984B2 (ja) | 物標検出装置 | |
| CN115087884B (zh) | 雷达装置、观测对象检测方法以及车载装置 | |
| JP2012510055A (ja) | レーダー信号処理方法およびレーダー信号処理装置 | |
| KR20150085028A (ko) | 고속 처프 fmcw 레이더 | |
| JP2015514971A (ja) | 物標検出の方法 | |
| CN107923967B (zh) | 处理从目标反射的接收辐射 | |
| AU2015295795B2 (en) | Method and apparatus for detecting a speed and a distance of at least one object with respect to a receiver of a reception signal | |
| US8884814B2 (en) | Processing method for FMCW radar signal with dual pulse repetition frequency | |
| JP2019045365A (ja) | レーダ装置 | |
| JP7261302B2 (ja) | レーダ装置 | |
| CN115616562A (zh) | 使用雷达检测目标的装置和方法 | |
| JP7160561B2 (ja) | 方位演算装置及び方位演算方法 | |
| JP7274271B2 (ja) | レーダ装置および物標判別方法 | |
| US12529776B2 (en) | Vehicle radar system | |
| WO2020054031A1 (ja) | レーダ装置および目標距離計測方法 | |
| JP2017167839A (ja) | 車載装置 | |
| CN112771402A (zh) | 用于在雷达系统中进行检测的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180418 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190304 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6500838 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |