JP2017211265A - 測量装置、移動体、測量方法及びプログラム - Google Patents
測量装置、移動体、測量方法及びプログラム Download PDFInfo
- Publication number
- JP2017211265A JP2017211265A JP2016104224A JP2016104224A JP2017211265A JP 2017211265 A JP2017211265 A JP 2017211265A JP 2016104224 A JP2016104224 A JP 2016104224A JP 2016104224 A JP2016104224 A JP 2016104224A JP 2017211265 A JP2017211265 A JP 2017211265A
- Authority
- JP
- Japan
- Prior art keywords
- range sensor
- information
- arm
- sensor
- position information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 46
- 238000004364 calculation method Methods 0.000 claims abstract description 116
- 238000005259 measurement Methods 0.000 claims abstract description 50
- 238000012545 processing Methods 0.000 claims abstract description 46
- 230000007246 mechanism Effects 0.000 claims abstract description 23
- 238000006243 chemical reaction Methods 0.000 claims description 43
- 230000006870 function Effects 0.000 claims description 8
- 238000012937 correction Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 18
- 230000008569 process Effects 0.000 description 14
- 238000006073 displacement reaction Methods 0.000 description 10
- 238000011156 evaluation Methods 0.000 description 8
- 238000004422 calculation algorithm Methods 0.000 description 6
- 230000008602 contraction Effects 0.000 description 6
- 238000007796 conventional method Methods 0.000 description 6
- 238000013519 translation Methods 0.000 description 6
- 238000005452 bending Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000004891 communication Methods 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images


















Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description
以下、本発明の一実施形態による測量装置を図1〜図9を参照して説明する。
図1は本発明に係る第一実施形態における測量装置の一例を示すブロック図である。
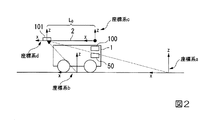
図2は本発明に係る第一実施形態における測量装置を搭載した走行台車の一例を示す図である。
図2に示すように走行台車1は、アーム2、測量装置100、制御装置50を備えている。アーム2の一方の端は走行台車1に旋回可能に連結され、アーム2は地面と垂直方向の旋回動作(上下動作)が可能である。また、アーム2の他方の先端付近にはレーザ測域センサ101が設けられている。また、アーム2は伸縮機構を有しており伸展動作が可能である。制御装置50は、走行台車1の走行・停止、アーム2の伸縮・旋回動作を制御する。以下、アーム2が縮んだ状態(アーム2の長さがL0)で且つアーム2が下げられた状態(仰角が略0度)を収納状態と呼ぶ。また、アーム2が伸展または旋回されている状態を作業状態と呼ぶ。アーム2の先端付近に設けられたレーザ測域センサ101は、走行台車1の周囲に存在する対象物(例えば、壁、塀、建物、岩など、これらを総称して障害物と呼ぶ)との距離を計測し、その距離情報に基づいて、レーザ測域センサ101の周囲の地図情報を作成するために用いられる。アーム2の伸展、旋回が可能なため、高所での測量が可能である。また、走行台車1は走行し、レーザ測域センサ101は、走行台車1の走行中にも距離の計測が可能である。従って、走行台車1の走行中に計測された距離情報に基づいて地図情報を作成することも可能であるが、地図情報を作成するためには、計測した距離情報は、走行台車1を基準とする座標系で計測された値であるため、地図情報の基準となる座標系における座標情報に変換しなければならない。つまり、レーザ測域センサ101が計測した自身を基準とする距離情報に対して、走行台車1の走行に伴うレーザ測域センサ101の移動分を補正する必要がある。また、高所測量時のように走行台車1が停止している場合であっても、アーム2が伸展、旋回した場合、アーム2の動作によるレーザ測域センサ101の移動分を補正する必要がある。測量装置100は、これらの補正を行って、レーザ測域センサ101の地図座標系における位置情報を計算する。
ホイール回転数計測センサ102は、走行台車1が備えるタイヤを回転させるホイールの回転数を計測するセンサである。ホイール回転数計測センサ102が計測したホイールの回転数によって走行台車1の走行距離を計算することができる。
操舵角計測センサ103は、走行台車1が備えるタイヤの操舵角度を検出するセンサである。操舵角計測センサ103が計測した操舵角によって走行台車1の走行方向を計算することができる。
仰角計測センサ105は、アーム2の垂直方向の旋回角度(仰角)を計測する。アーム2の上下方向の動作は、制御装置50によって制御される。例えば、仰角計測センサ105は、制御装置50からアーム2の上下動の指令値を取得し、この指令値に基づいてアーム2の仰角(θ1)を計算する。
センサ位置地図座標変換部109は、アーム2の作業状態におけるレーザ測域センサ101の地図座標系における位置情報、姿勢情報を計算する。具体的には、センサ位置地図座標変換部109は、センサ位置座標変換部107が計算した地図座標系でのレーザ測域センサ101の位置情報、姿勢情報と、センサ位置幾何学計算処理部108が計算した座標系cでのレーザ測域センサ101の位置情報、姿勢情報とを取得し、これらを用いて地図座標系におけるレーザ測域センサ101の位置情報、姿勢情報を計算する。より具体的には、センサ位置地図座標変換部109は、座標系cでのレーザ測域センサ101の位置情報、姿勢情報を、座標系bを基準とする値に座標変換し、さらに座標変換後の値にセンサ位置座標変換部107が計算した地図座標系で位置情報、姿勢情報を加算する。
測量装置100は、この他にも地図情報作成のための種々の機能を有していてもよいが、本実施形態では、地図情報の作成時に必要とされるレーザ測域センサ101の位置情報、姿勢情報の推定に必要な構成のみを説明し、他の構成の説明を省略する。
図3は、従来の方法による測量装置の測域センサの位置情報の計算方法を説明する第一の図である。
従来は、レーザ測域センサ101の位置情報を、オドメトリによる測位やGPSの測位情報を用いて計算することが多かった。オドメトリによる測位には、誤差が累積されるという課題があり、GPSによる測位にはGPS電波を受信できない環境では測位できない、反射波による精度の低下、測位間隔が長く、測位の間の移動を把握することができない等の課題があった。図3は、屋内や電波環境が良好ではない等のGPSが使用できない環境下でオドメトリのみによってレーザ測域センサ101の位置情報を計算した場合の、走行台車1に伴って実際にレーザ測域センサ101が移動した軌跡と、オドメトリを用いて計算したレーザ測域センサ101の軌跡とを示す図である。図3の軌跡7は、障害物5A、5Bの間の通路を走行台車1が移動したときの実際のレーザ測域センサ101の移動経路を示している。これに対し、軌跡6は、走行台車1が移動に伴って計測したホイール回転数や操舵角度に基づくオドメトリによるレーザ測域センサ101の移動経路を示している。図示するようにオドメトリによる測位のみを用いると誤差が徐々に大きくなる場合が多い。レーザ測域センサ101の位置情報の誤差が拡大すると、スキャンマッチングによる走行台車1の周辺の地図情報の精度も低下する。
障害物5A、5B上に表示された点線の丸印は、レーザ測域センサ101が時刻t−1に所定の範囲を走査して計測した距離情報に対応する点群情報を示している。同様に実線の丸印は、レーザ測域センサ101が時刻tに所定の範囲を走査して計測した距離情報に対応する点群情報を示している。スキャンマッチング計算部111は、オドメトリによって計算した時刻t−1におけるレーザ測域センサ101の位置情報で時刻t−1に得られた点群情報を補正する。また、スキャンマッチング計算部111は、オドメトリによって計算した時刻tにおけるレーザ測域センサ101の位置情報で時刻tに得られた点群情報を補正する。スキャンマッチング計算部111は、補正後の時刻t−1、tにおける点群情報を用いてスキャンマッチングを行いレーザ測域センサ101の位置の推定を行う。図4の軌跡8は、スキャンマッチング計算部111が推定した位置情報の軌跡を示している。図示するように軌跡7と軌跡8の誤差は、図3で例示した軌跡7と軌跡6の誤差に比べ小さく、精度よくレーザ測域センサ101の位置情報を推定できることが分かる。レーザ測域センサ101の位置情報の誤差が小さいので、スキャンマッチングによる走行台車1の周辺の地図情報の精度も向上する。本実施形態によれば、レーザ測域センサ101の位置情報の平面方向における精度が向上できることが分かる。
図5は、従来の方法による測量装置の測域センサの位置情報の計算方法を説明する第二の図である。
図5は、幾何学的手法のみによって計算した場合のレーザ測域センサ101の位置情報と実際のレーザ測域センサ101の位置との差を示している。従来は、アーム2の伸展時におけるレーザ測域センサ101の位置情報を、伸展長さ(L0+ΔL)と仰角θ1による幾何学的な計算を用いて計算することが多かった。つまり、従来の方法では、図5に示す点3の位置を計算する。しかし、実際には、アーム2の撓みによって、レーザ測域センサ101は点3´に位置する。従来の方法では、アーム2の撓みを考慮しない為、レーザ測域センサ101の位置情報に誤差が生じる。従って、アーム2を伸展させて所定の範囲を走査して得られる高所の障害物9の地図情報の精度も低下する。
障害物9上に表示された点線の丸印は、レーザ測域センサ101が時刻t−1に所定の範囲を走査して計測した距離情報に対応する位置を示している。実線の丸印は、レーザ測域センサ101が時刻tに所定の範囲を走査して計測した距離情報に対応する点群情報を示している。スキャンマッチング計算部111は、幾何学的手法によって計算した時刻t−1におけるレーザ測域センサ101の位置情報を用いて、時刻t−1に得られた点群情報を補正する。また、スキャンマッチング計算部111は、幾何学的手法によって計算した時刻tにおけるレーザ測域センサ101の位置情報を用いて、時刻tに得られた点群情報を補正する。スキャンマッチング計算部111は、補正後の時刻t−1、tにおける点群情報を用いてスキャンマッチングを行いレーザ測域センサ101の位置の推定を行う。これにより、スキャンマッチング計算部111は、点3´に近い位置をレーザ測域センサ101の位置情報として推定できる可能性が高くなる。本実施形態によれば、部材の剛性を上げたり、センサを追加したり、部材を軽量化する等の対応を行うことなく、アーム2の伸展・旋回時におけるレーザ測域センサ101の位置情報、姿勢情報の推定精度を向上することができる。レーザ測域センサ101の位置情報、姿勢情報をより精度よく推定できるので、スキャンマッチングによる高所の地図情報の精度も向上する。
図7は、本発明に係る第一実施形態における測域センサの位置情報推定処理の一例を示す第一のフローチャートである。
前提として、走行台車1は、地図情報の作成対象位置(測量対象位置)へ移動して、その場で停車してアーム2を展開し、アーム2を上下させ障害物9に対してレーザ光を走査し、障害物9を対象とした点群情報を計測するものとする。また、走行台車1の移動中、アーム2は収納状態であり、走行台車1が対象位置へ到着した後にアーム2を作業状態に切り替えるものとする。また、ユーザは、アーム2が収納状態か作業状態かを測量装置100へ入力する。また、レーザ測域センサ101は、走行台車1の走行中も走査を行い、走行中の走行台車1の周辺に存在する障害物5A、5Bを対象とする点群情報を計測する。また、レーザ測域センサ101は、所定の時間間隔で走査を行い、その度に計測した点群情報をスキャンマッチング計算部111に出力しているとする。
走行台車1が移動中、測量装置100は、レーザ測域センサ101の位置情報を推定する(ステップS11)。具体的には、オドメトリ計算処理部106は、所定の時間間隔でホイール回転数計測センサ102の計測値と、操舵角計測センサ103の計測値とを取得し、走行台車1の移動量、移動方向を計算する。次に、オドメトリ計算処理部106は、計算した移動量、移動方向を走行台車1の初期位置等に加算して走行台車1の位置情報、姿勢情報を計算する。また、センサ位置座標変換部107は、オドメトリ計算処理部106が計算した走行台車1の位置情報、姿勢情報と、収納状態におけるレーザ測域センサ101の走行台車1を基準とする座標系での位置情報、姿勢情報とを用いて、レーザ測域センサ101の地図座標系での位置情報、姿勢情報を計算する。このようにセンサ位置座標変換部107は、走行台車1の移動中に、所定の時間間隔でレーザ測域センサ101の位置情報(オドメトリによる位置情報)を計算し、センサ位置情報選択部110に出力する。センサ位置情報選択部110は、アーム2が収納状態にあることに基づいて、センサ位置座標変換部107が計算した位置情報を選択してスキャンマッチング計算部111に出力する。次にスキャンマッチング計算部111は、センサ位置座標変換部107が計算したレーザ測域センサ101の位置情報、姿勢情報と、レーザ測域センサ101が計測した障害物5A、5Bに対する点群情報とを用いてICPスキャンマッチングを行いレーザ測域センサ101の位置情報を推定する。このようにスキャンマッチング計算部111は、走行台車1の移動中には、オドメトリによる位置情報を用いてスキャンマッチングを行う。図2の軌跡8は、スキャンマッチング計算部111が推定したセンサ位置の軌跡を示している。スキャンマッチング計算部111は、推定したレーザ測域センサ101の位置情報、姿勢情報を制御装置50等に出力する。
図8は、本発明に係る第一実施形態における測域センサの位置情報推定処理の一例を示す第二のフローチャートである。
図9は、本発明に係る第一実施形態におけるスキャンマッチングの説明を行う図である。
前提として、レーザ測域センサ101は、所定の時間間隔で走査を行い、その度に計測した点群情報をスキャンマッチング計算部111に出力している。また、センサ位置情報選択部110は、センサ位置座標変換部107又はセンサ位置地図座標変換部109から取得した位置情報等をスキャンマッチング計算部111に出力している。スキャンマッチング計算部111は、ある周期でスキャンマッチングを行うが、その間にレーザ測域センサ101、センサ位置情報選択部110から取得した点群情報を記憶部(図示せず)に記録する等して記憶する。

以下、本発明の第二実施形態による測量装置について図10〜図11を参照して説明する。
図10は、本発明に係る第二実施形態における測量装置の一例を示すブロック図である。図11は、本発明に係る第二実施形態における測量装置を搭載した走行台車の一例を示す図である。
本発明の第二実施形態に係る構成のうち、本発明の第一実施形態に係る測量装置100を構成する機能部と同じものには同じ符号を付し、それぞれの説明を省略する。第二実施形態に係る測量装置100Aは、第一実施形態の構成に加えて、慣性計測装置112を備えている。
慣性計測装置112は、図11に示すようにレーザ測域センサ101の近傍に設けられる慣性センサである。慣性計測装置112は、レーザ測域センサ101の姿勢情報を計測する。例えば、慣性計測装置112は、アーム2の作業状態におけるレーザ測域センサ101の地面と平行な面に対する角度を計測する。慣性計測装置112は、計測した姿勢情報(角度)をスキャンマッチング計算部111に出力する。
スキャンマッチング計算部111は、図7のステップS14においてレーザ測域センサ101の姿勢情報θarmに慣性計測装置112の計測値を用いることができる。スキャンマッチング計算部111は、慣性計測装置112から取得した姿勢情報を用いてスキャンマッチングを行うことで、レーザ測域センサ101の位置情報、姿勢情報をさらに正確に推定することができる。例えば、走行台車1の足場の角度が急激に変化した場合など、レーザ測域センサ101の姿勢が大きく変化することがある。そのような場合に、レーザ測域センサ101の姿勢の変化を考慮せずにスキャンマッチングを行うと、対応点の探索が困難となり、レーザ測域センサ101の位置情報が精度よく推定できない可能性がある。本実施形態では、慣性計測装置112が計測した姿勢情報を用いて初期変位を与えることができ、スキャンマッチング処理を効率化、安定化することができる。
以下、本発明の第三実施形態による測量装置について図12を参照して説明する。
図12は、本発明に係る第三実施形態における測量装置の一例を示すブロック図である。
本発明の第三実施形態に係る構成のうち、本発明の第二実施形態に係る測量装置100Aを構成する機能部と同じものには同じ符号を付し、それぞれの説明を省略する。第三実施形態に係る測量装置100Bは、第二実施形態の構成に加えて、撓み補償量計算部113を備えている。
撓み補償量計算部113は、ストローク計測センサ104から取得したアーム2のストロークおよび仰角計測センサ105から取得した仰角に基づいて、アーム2の先端位置の撓み量を計算する。撓み補償量計算部113は、例えば、アーム2を片持ち梁とみなした物理モデルに基づいて撓み量を計算してもよい。あるいは、アーム2のストロークおよび仰角を変化させつつ、そのときの撓み量を予め実測し、アーム2のストロークおよび仰角に対応付けて撓み量を記録したルックアップテーブルを作成し、このルックアップテーブルに基づいて撓み量を計算してもよい。撓み補償量計算部113は、センサ位置幾何学計算処理部108が計算したレーザ測域センサ101の位置情報、姿勢情報を、計算した撓み量で補正する。センサ位置地図座標変換部109は、補正されたレーザ測域センサ101の位置情報、姿勢情報を取得し、以降の処理を行う。
スキャンマッチング計算部111は、図7のステップS14において撓み量で補正された後のレーザ測域センサ101の位置情報、姿勢情報を用いてスキャンマッチングを行う。これにより、レーザ測域センサ101の位置情報、姿勢情報をさらに正確に推定することができる。
なお、第三実施形態の撓み補償量計算部113を、第一実施形態の構成に追加した構成としてもよい。
以下、本発明の第四実施形態による測量装置について図13〜図17を参照して説明する。
図13は、本発明に係る第四実施形態における測量装置の一例を示すブロック図である。
図14は、本発明に係る第四実施形態における測量装置を搭載した走行台車の一例を示す図である。
本発明の第四実施形態に係る構成のうち、本発明の第三実施形態に係る測量装置100Bを構成する機能部と同じものには同じ符号を付し、それぞれの説明を省略する。第四実施形態に係る測量装置100Cは、第三実施形態の構成に加えて、走査平面方向変更部114を備えている。
第四実施形態に係るレーザ測域センサ101は、2次元のレーザスキャナである。また、図14に示すようにアーム2の先端部には回転機構21が設けられ、レーザ測域センサ101をアーム2の軸方向回りに回転させることで走査平面を変更することができる。
走査平面方向変更部114は、センサ位置情報選択部110に入力されたアーム2の動作状態(収納状態か作業状態か)に応じて、レーザ測域センサ101の走査平面を切り替えるよう制御装置50に指示を行う。
図15は、走行台車1が走行中の場合のレーザ測域センサ101の走査平面P1を示している。走行台車1が走行中の場合、つまり、センサ位置情報選択部110に入力されたアーム2の動作状態が収納状態の場合、走査平面方向変更部114は、レーザ測域センサ101の走査平面P1が地面と平行な面となるように制御する。
図16は、走行台車1が停止し、アーム2を伸展させている場合のレーザ測域センサ101の走査平面P2を示している。センサ位置情報選択部110に入力されたアーム2の動作状態が作業状態の場合、走査平面方向変更部114は、レーザ測域センサ101の走査平面P2が地面と垂直な面となるように制御する。
図17は、本発明に係る第四実施形態における測域センサの位置情報推定処理の一例を示すフローチャートである。
なお、図7と同様の処理については簡単に説明を行う。まず、走行台車1が移動を開始する(ステップS10)。走行台車1が移動中、測量装置100は、レーザ測域センサ101の位置情報を推定する(ステップS11)。次に、制御装置50が、走行台車1の移動が完了したかどうかを判定する(ステップS12)。移動が完了していない場合、ステップS11からの処理を繰り返す。移動が完了した場合、制御装置50は移動が完了したことを示す信号をユーザへ通知する。このとき、ユーザは、アーム2の動作状態を収納状態から作業状態へ切り替えることを測量装置100へ入力する。センサ位置情報選択部110は、ユーザの入力した情報を走査平面方向変更部114へ出力する。走査平面方向変更部114は、センサ位置情報選択部110に入力された収納状態から作業状態への切り替え指示情報に基づいてレーザ測域センサ101の走査平面を地面に水平な平面から垂直な平面に切り替えるよう制御装置50に指示する。制御装置50は、回転機構21を制御し、レーザ測域センサ101の走査平面を回転させる(ステップS121)。次にユーザは、アーム2の伸展、旋回動作を指示する情報を制御装置50へ入力する。制御装置50は、アーム2の動作を制御し、アーム2は伸展動作・旋回動作を開始する(ステップS13)。次に測量装置100は、レーザ測域センサ101の位置情報を推定する(ステップS14)。次に制御装置50が、アーム2の伸展が完了したかどうかを判定する(ステップS15)。伸展が完了した場合、制御装置50はアーム2の伸展・旋回動作を停止し、その位置での測量(高所測量)を行う(ステップS16)。
なお、第四実施形態は、第一実施形態、または、第二実施形態に適用してもよい。
以下、本発明の第五実施形態による測量装置について図18〜図19を参照して説明する。
図18は、本発明に係る第五実施形態における測量装置の一例を示すブロック図である。
本発明の第五実施形態に係る構成のうち、本発明の第一実施形態に係る測量装置100を構成する機能部と同じものには同じ符号を付し、それぞれの説明を省略する。第五実施形態に係る測量装置100Dは、第一実施形態の構成に加えて、アーム先端回転軸エンコーダ115、点群座標変換部116、点群メモリ部117を備えている。
第四実施形態と同様に第五実施形態に係るレーザ測域センサ101は、2次元のレーザスキャナである。また、図14に示すようにアーム2の先端部には回転機構21が設けられ、レーザ測域センサ101をアーム2の軸方向回りに回転させることで走査平面を変更することができる。また、制御装置50は、回転機構21を常時回転させながら走行台車1を移動させたり、アーム2を伸展させたりする。
アーム先端回転軸エンコーダ115は、回転機構21の回転量(角度)を計測する。
点群座標変換部116は、レーザ測域センサ101から点群情報を取得する。また、点群座標変換部116は、アーム先端回転軸エンコーダ115から回転機構21の回転量を取得する。点群座標変換部116は、取得した回転量の情報を用いて点群情報を3次元空間の座標情報に座標変換する。
点群メモリ部117は、点群座標変換部116が座標変換した点群情報を一定周期分蓄積し、それらをアセンブリして、疑似的な3次元のレーザスキャナで走査を行った場合の点群情報(3次元の点群)を生成し、3次元の点群情報をスキャンマッチング計算部111に出力する。
スキャンマッチング計算部111は、3次元点群情報と、センサ位置情報選択部110から取得したレーザ測域センサ101の位置情報、姿勢情報(オドメトリまたは幾何学的手法による位置情報、姿勢情報)とを用いてスキャンマッチングを行い、レーザ測域センサ101の3次元における位置情報(XYZ座標)、姿勢情報(ロール角、ピッチ角、ヨー角)を求める。
図19(a)は、走行台車1が走行中の場合のレーザ測域センサ101の走査方法を示している。走行台車1が走行中の場合、制御装置50は、回転機構21を回転させながら走行台車1を移動する。レーザ測域センサ101は、走査平面を360度変化させながら点群情報の計測を行う。点群座標変換部116は、レーザ測域センサ101が計測した2次元の点群情報に、アーム先端回転軸エンコーダ115が計測した回転量を加え、2次元の点群の座標情報を3次元空間内での座標情報に変換する。点群メモリ部117は、例えば、レーザ測域センサ101の走査平面が360度変化する度に、その間蓄積した点群情報をアセンブリして3次元のレーザスキャナが計測した点群情報と同様の点群情報の集合を生成する。スキャンマッチング計算部111は、点群メモリ部117から3次元の点群情報を取得し、3次元点群情報とオドメトリによる位置情報を用いてスキャンマッチングを行う。
なお、第五実施形態は、第二実施形態、第三実施形態の構成に適用することも可能である。
2・・・アーム
100、100A、100B、100C、100D・・・測量装置
101・・・レーザ測域センサ
102・・・ホイール回転数計測センサ
103・・・操舵角計測センサ
104・・・ストローク計測センサ
105・・・仰角計測センサ
106・・・オドメトリ計算処理部
107・・・センサ位置座標変換部
108・・・センサ位置幾何学計算処理部
109・・・センサ位置地図座標変換部
110・・・センサ位置情報選択部
111・・・スキャンマッチング計算部
112・・・慣性計測装置
113・・・撓み補償量計算部
114・・・走査平面方向変更部
115・・・アーム先端回転軸エンコーダ
116・・・点群座標変換部
117・・・点群メモリ部
Claims (12)
- 地面と垂直な方向に旋回可能で伸縮機構を有するアームに設けられ、対象物との距離を計測する測域センサと、
前記アームの長さおよび旋回角に基づいて、前記測域センサの位置情報を計算するセンサ位置幾何学計算処理部と、
前記センサ位置幾何学計算処理部が計算した測域センサの位置情報と、前記測域センサが走査して得た距離情報が示す対象物の位置に対応する点群情報と、に基づいてスキャンマッチングを行い、前記測域センサの位置情報を計算するスキャンマッチング計算部と、
を備える測量装置。 - 前記測域センサは、所定の時間間隔で走査を行って点群情報を計測し、
前記スキャンマッチング計算部は、前記測域センサが所定のタイミングで計測した点群情報と、1つ前のタイミングで計測した点群情報とを比較してスキャンマッチングを行うにあたり、それぞれのタイミングにおいて前記センサ位置幾何学計算処理部が計算した測域センサの位置情報を用いて前記測域センサが計測した点群情報のそれぞれを変位させ、スキャンマッチングを行う、
請求項1に記載の測量装置。 - 前記測域センサの姿勢情報を計測する慣性センサ、をさらに備え、
前記スキャンマッチング計算部は、前記測域センサの位置情報に加えて、前記測域センサの姿勢情報を用いて、スキャンマッチングを行う、
請求項1または請求項2に記載の測量装置。 - 前記アームの長さおよび旋回角に応じた当該アームの撓み量を計算する撓み補償量計算部、をさらに備え、
前記スキャンマッチング計算部は、前記撓み補償量計算部が計算した撓み量による補正後の前記測域センサの位置情報を用いて、スキャンマッチングを行う、
請求項1から請求項3の何れか1項に記載の測量装置。 - 前記アームを有する移動体に備えられたセンサの計測値に基づいて当該移動体の位置情報を計算するオドメトリ計算処理部、
をさらに備え、
前記スキャンマッチング計算部は、前記オドメトリ計算処理部が計算した前記移動体の位置情報に基づく前記測域センサの位置情報を用いてスキャンマッチングを行う、
請求項1から請求項4の何れか1項に記載の測量装置。 - 前記スキャンマッチング計算部は、
前記アームが伸展動作および旋回動作が行われていない収納状態にある場合、前記オドメトリ計算処理部が計算した前記移動体の位置情報に基づく前記測域センサの位置情報のみを用いてスキャンマッチングを行い、
前記アームが伸展動作および旋回動作のうち少なくとも一方が行われている作業状態にある場合、前記オドメトリ計算処理部が計算した前記測域センサの位置情報に加えて、前記センサ位置幾何学計算処理部が計算した測域センサの位置情報を用いてスキャンマッチングを行う、
請求項5に記載の測量装置。 - 前記測域センサは、前記アームの軸方向回りに回転可能に設けられ、2次元平面を走査する測域センサであって、
前記アームが伸展動作および旋回動作のうち少なくとも一方が行われている作業状態にある場合、前記測域センサが走査する2次元平面が地面と垂直となるよう制御する走査平面方向変更部、
をさらに備える請求項1から請求項6の何れか1項に記載の測量装置。 - 前記走査平面方向変更部は、前記アームが伸展動作および旋回動作が行われていない収納状態にある場合、前記測域センサの走査平面が地面と平行となるよう制御する、
請求項7に記載の測量装置。 - 前記測域センサは、前記アームの軸方向回りに回転可能に設けられ、2次元平面を走査する測域センサであって、
前記測域センサの回転量を取得し、前記測域センサが走査して得た点群情報を3次元座標に変換する点群座標変換部と、
前記点群座標変換部が変換した点群情報を蓄積し、蓄積した点群情報の集合を用いて3次元の点群情報を生成する点群メモリ部と、
をさらに備え、
前記スキャンマッチング計算部は、前記点群メモリ部が生成した3次元の点群情報を用いてスキャンマッチングを行う、
請求項1から請求項6の何れか1項に記載の測量装置。 - 請求項1から請求項9の何れか1項に記載の測量装置と、
地面と垂直な方向に旋回可能で伸縮機構を有するアームであって、前記測量装置が備える測域センサが設けられたアームと、
を備える移動体。 - 地面と垂直な方向に旋回可能で伸縮機構を有するアームに設けられ、対象物との距離を計測する測域センサを備える測量装置が、
前記アームの長さおよび旋回角に基づいて、前記測域センサの位置情報を計算し、
前記計算した測域センサの位置情報と、前記測域センサが走査して得た距離情報が示す対象物の位置に対応する点群情報と、に基づいてスキャンマッチングを行い、前記測域センサの位置情報を計算する、
測量方法。 - 地面と垂直な方向に旋回可能で伸縮機構を有するアームに設けられ、対象物との距離を計測する測域センサを備える測量装置のコンピュータを、
前記アームの長さおよび旋回角に基づいて、前記測域センサの位置情報を計算する手段、
前記計算した測域センサの位置情報と、前記測域センサが走査して得た距離情報が示す対象物の位置に対応する点群情報と、に基づいてスキャンマッチングを行い、前記測域センサの位置情報を計算する手段、
として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104224A JP6680614B2 (ja) | 2016-05-25 | 2016-05-25 | 測量装置、移動体、測量方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104224A JP6680614B2 (ja) | 2016-05-25 | 2016-05-25 | 測量装置、移動体、測量方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017211265A true JP2017211265A (ja) | 2017-11-30 |
| JP6680614B2 JP6680614B2 (ja) | 2020-04-15 |
Family
ID=60475480
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016104224A Active JP6680614B2 (ja) | 2016-05-25 | 2016-05-25 | 測量装置、移動体、測量方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6680614B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018181965A1 (ja) | 2017-03-30 | 2018-10-04 | 株式会社吉野工業所 | コンパクト容器 |
| CN111829436A (zh) * | 2019-04-23 | 2020-10-27 | 卡尔蔡司工业测量技术有限公司 | 用于控制坐标测量机器的方法以及坐标测量机器 |
| CN111912431A (zh) * | 2020-03-19 | 2020-11-10 | 中山大学 | 一种移动机器人导航系统定位精度测试方案 |
| JP2021177144A (ja) * | 2020-05-08 | 2021-11-11 | キヤノン株式会社 | 情報処理装置、情報処理方法及びープログラム |
| JP2022504787A (ja) * | 2018-10-31 | 2022-01-13 | ルノー エス.ア.エス. | 自動車両の移動ベクトルを決定するための方法、車両の速度を判断するための方法、および関連する車両 |
| US11333764B2 (en) * | 2018-02-01 | 2022-05-17 | Topcon Corporation | Survey system |
| JP2023023659A (ja) * | 2021-08-05 | 2023-02-16 | 株式会社フジタ | 地図作成システムおよび地図作成方法 |
| CN116466319A (zh) * | 2023-03-08 | 2023-07-21 | 江苏红豆工业互联网有限公司 | 一种激光雷达3d点云数据的合成方法、装置及系统 |
| CN116499433A (zh) * | 2022-01-27 | 2023-07-28 | 莱卡地球系统公开股份有限公司 | 移动测量装置、测定其合适部署的方法和计算机程序产品 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03128415A (ja) * | 1989-10-13 | 1991-05-31 | Mitsui Constr Co Ltd | 地形図作成方法 |
| JP2001240392A (ja) * | 2000-02-28 | 2001-09-04 | Tadano Ltd | ブーム作業車の撓み角度の算出方法及び装置 |
| JP2010096752A (ja) * | 2008-09-16 | 2010-04-30 | Adoin Kenkyusho:Kk | 樹木情報計測方法、樹木情報計測装置、プログラム |
| JP2011210121A (ja) * | 2010-03-30 | 2011-10-20 | Fuji Soft Inc | ロボットのプログラム及び情報処理装置のプログラム |
| JP2014062803A (ja) * | 2012-09-21 | 2014-04-10 | Tadano Ltd | 監視カメラ装置 |
-
2016
- 2016-05-25 JP JP2016104224A patent/JP6680614B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03128415A (ja) * | 1989-10-13 | 1991-05-31 | Mitsui Constr Co Ltd | 地形図作成方法 |
| JP2001240392A (ja) * | 2000-02-28 | 2001-09-04 | Tadano Ltd | ブーム作業車の撓み角度の算出方法及び装置 |
| JP2010096752A (ja) * | 2008-09-16 | 2010-04-30 | Adoin Kenkyusho:Kk | 樹木情報計測方法、樹木情報計測装置、プログラム |
| JP2011210121A (ja) * | 2010-03-30 | 2011-10-20 | Fuji Soft Inc | ロボットのプログラム及び情報処理装置のプログラム |
| JP2014062803A (ja) * | 2012-09-21 | 2014-04-10 | Tadano Ltd | 監視カメラ装置 |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018181965A1 (ja) | 2017-03-30 | 2018-10-04 | 株式会社吉野工業所 | コンパクト容器 |
| US11333764B2 (en) * | 2018-02-01 | 2022-05-17 | Topcon Corporation | Survey system |
| JP7166447B2 (ja) | 2018-10-31 | 2022-11-07 | ルノー エス.ア.エス. | 自動車両の移動ベクトルを決定するための方法、車両の速度を判断するための方法、および関連する車両 |
| JP2022504787A (ja) * | 2018-10-31 | 2022-01-13 | ルノー エス.ア.エス. | 自動車両の移動ベクトルを決定するための方法、車両の速度を判断するための方法、および関連する車両 |
| CN111829436A (zh) * | 2019-04-23 | 2020-10-27 | 卡尔蔡司工业测量技术有限公司 | 用于控制坐标测量机器的方法以及坐标测量机器 |
| CN111829436B (zh) * | 2019-04-23 | 2022-08-09 | 卡尔蔡司工业测量技术有限公司 | 用于控制坐标测量机器的方法以及坐标测量机器 |
| CN111912431A (zh) * | 2020-03-19 | 2020-11-10 | 中山大学 | 一种移动机器人导航系统定位精度测试方案 |
| JP2021177144A (ja) * | 2020-05-08 | 2021-11-11 | キヤノン株式会社 | 情報処理装置、情報処理方法及びープログラム |
| JP7693284B2 (ja) | 2020-05-08 | 2025-06-17 | キヤノン株式会社 | 情報処理装置、情報処理方法及びープログラム |
| JP2023023659A (ja) * | 2021-08-05 | 2023-02-16 | 株式会社フジタ | 地図作成システムおよび地図作成方法 |
| JP7805119B2 (ja) | 2021-08-05 | 2026-01-23 | 株式会社フジタ | 地図作成システムおよび地図作成方法 |
| CN116499433A (zh) * | 2022-01-27 | 2023-07-28 | 莱卡地球系统公开股份有限公司 | 移动测量装置、测定其合适部署的方法和计算机程序产品 |
| CN116466319A (zh) * | 2023-03-08 | 2023-07-21 | 江苏红豆工业互联网有限公司 | 一种激光雷达3d点云数据的合成方法、装置及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6680614B2 (ja) | 2020-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6680614B2 (ja) | 測量装置、移動体、測量方法及びプログラム | |
| JP5873607B1 (ja) | 作業機械の較正装置、及び作業機械の作業機パラメータの較正方法 | |
| US9969086B1 (en) | Achieving a target gait in a legged robot based on steering commands | |
| KR101309415B1 (ko) | 로봇 시스템 및 지도 갱신 방법 | |
| US8571762B2 (en) | Real time method for determining the spatial pose of electronic mining shovels | |
| KR101976241B1 (ko) | 다중로봇의 자기위치인식에 기반한 지도작성 시스템 및 그 방법 | |
| JP2009193240A (ja) | 移動ロボット及び環境地図の生成方法 | |
| JP5278283B2 (ja) | 自律移動装置及びその制御方法 | |
| JP4738472B2 (ja) | 障害物回避機能を有する移動制御装置 | |
| US20190301144A1 (en) | Converting mobile machines into high precision robots | |
| CN111624995B (zh) | 移动机器人高精度导航定位的方法 | |
| JP5310285B2 (ja) | 自己位置推定装置及び自己位置推定方法 | |
| US12496842B2 (en) | Printing systems | |
| CN105572679B (zh) | 一种二维扫描型激光雷达的扫描数据修正方法及系统 | |
| CN108350679A (zh) | 机动平地机的铲刀自动控制系统 | |
| CN109764805A (zh) | 一种基于激光扫描的机械臂定位装置与方法 | |
| JP2006322937A (ja) | オブジェクトの表面の3d座標を判定する方法 | |
| CN106272433A (zh) | 自主移动机器人的轨迹定位系统及方法 | |
| EP4071575B1 (en) | Control method for mobile object, mobile object, and computer readable storage medium | |
| JP2011238104A (ja) | 移動ロボット | |
| JP2010112836A (ja) | 自己位置同定装置および該自己位置同定装置を備えた移動ロボット | |
| JP2008139035A (ja) | 3次元環境計測装置及びそれを備えた移動ロボット | |
| CN108544491A (zh) | 一种综合考虑距离与方向两因素的移动机器人避障方法 | |
| JP5200980B2 (ja) | 追従制御装置及び追従制御方法 | |
| JP6734764B2 (ja) | 位置推定装置、地図情報作製装置、移動体、位置推定方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160526 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181109 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190425 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200306 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200310 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200319 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6680614 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |