JP2017211284A - モバイル端末およびこれを用いた自己位置推定システム並びにサーバおよび自己位置推定方法 - Google Patents
モバイル端末およびこれを用いた自己位置推定システム並びにサーバおよび自己位置推定方法 Download PDFInfo
- Publication number
- JP2017211284A JP2017211284A JP2016104808A JP2016104808A JP2017211284A JP 2017211284 A JP2017211284 A JP 2017211284A JP 2016104808 A JP2016104808 A JP 2016104808A JP 2016104808 A JP2016104808 A JP 2016104808A JP 2017211284 A JP2017211284 A JP 2017211284A
- Authority
- JP
- Japan
- Prior art keywords
- identification information
- self
- unit
- mobile terminal
- position estimation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Navigation (AREA)
Abstract
Description
このため、人工構造物の3D(three−dimensional)モデルをあらかじめ持ち、現在のカメラ映像内のオブジェクトと3Dモデルとの対応を取ることで、精度の高い撮影位置を求める手法が開示されている。(たとえば、特許文献1)
以下、この発明の実施の形態1を図に基づいて説明する。
図1は、この発明の実施の形態1による自己位置推定システムを示すブロック図である。
図1において、自己位置推定システムは、通信回線により通信可能になっているモバイル端末100とサーバ200を有する。
モバイル端末100は、次のように構成されている。
カメラ110は、周辺を撮影する。画像撮影部120は、カメラ110を通じて、周辺の画像を撮影する。画面表示部130(表示部)は、カメラ映像および地図情報などを表示装置に画面表示する。
画像内識別情報抽出部140(識別情報抽出部)は、画像内に含まれる文字列等の識別情報を抽出する。識別情報取得部150は、サーバ200から指定位置の識別情報を取得する。識別情報DB160は、識別情報取得部150によって取得された識別情報を保持する。
識別情報比較部170は、画像から抽出された識別情報と、識別情報DB160が保持する識別情報とを比較し、識別情報同士の対応付けを行なう。自己位置推定部180は、識別情報比較部170により対応付けられた識別情報から自己位置を推定する。GPS受信部190は、GPS衛星より位置情報を受信する。
3Dモデル生成部210は、MMS(mobile mapping system)などで計測された3D点群データから3Dモデルを生成する。3DモデルDB220は、3Dモデル生成部210により生成された3Dモデルを保持する。
3Dモデル識別情報抽出部230は、3Dモデルから文字列等の識別情報を抽出する。識別情報DB240(識別情報データベース)は、3Dモデル識別情報抽出部230により抽出された識別情報を保持する。識別情報送信部250は、モバイル端末100からの要求に応じて、識別情報を送信する。
図2において、モバイル端末100の主要なハードウェアを示す。ROM(Read Only Memory)12に格納されたソフトウェアにより、CPU(Central Processing Unit)11がRAM(Random Access Memory)13に一時的にデータを格納しつつ処理を行ない、表示装置15にカメラ映像および処理結果を表示する。識別情報DB160は、フラッシュメモリ14に格納される。
ROM12に格納されるソフトウェアは、画像撮影部120、画像内識別情報抽出部140、画面表示部130、識別情報取得部150、識別情報比較部170、自己位置推定部180およびGPS受信部190を含む。
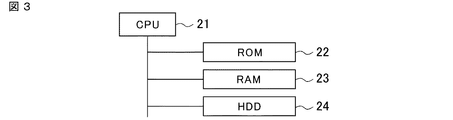
図3において、サーバ200の主要なハードウェアを示す。ROM22に格納されたソフトウェアにより、CPU21がRAM23に一時的にデータを格納しつつ処理を行なう。3DモデルDB220および識別情報DB240は、HDD(hard disk drive)24に格納される。
ROM22に格納されるソフトウェアは、3Dモデル生成部210、3Dモデル識別情報抽出部230および識別情報送信部250を含む。
図4において、識別情報DB240の各データは、識別情報と位置情報とを有する。識別情報は、文字列と、その大きさを有し、位置情報は、文字列のある看板などの緯度、経度である。
図5において、画面表示部130により表示される画面1301は、カメラ映像を表示する領域1302と、モバイル端末100の自己位置を地図上に表示する領域1303と、自己位置の緯度経度を表示する領域1304とを有する。
領域1302のカメラ映像中の識別情報の文字列で、識別情報DB160が保持する識別情報の文字列と対応付けられた文字列は、強調表示されるようになっている。
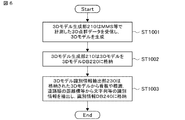
図6は、MMS等で計測された3D点群データをもとに、サーバ200内の識別情報DB240を更新するまでの流れを示す。
図7は、ユーザが指定した位置周辺の識別情報をモバイル端末100内の識別情報DB160に格納するまでの流れを示す。
図8は、現場で自己位置推定を行う際の流れを示す。
サーバ200の3Dモデル生成部210は、MMS等で計測された3D点群データを受信し、3Dモデルを生成する(ステップST1001)。
3Dモデル生成部210は、生成した3Dモデルを3DモデルDB220に格納する(ステップST1002)。
3Dモデル識別情報抽出部230は、3DモデルDB220に格納された3Dモデル内の看板や標識、道路脇の距離標等から文字列等の識別情報を抽出し、図4の示すように、文字列と、その大きさと、文字列を有する看板などの位置情報とを、識別情報DB240に格納する(ステップST1003)。
モバイル端末100の識別情報取得部150は、サーバ200の識別情報送信部250に、指定位置付近の識別情報を要求する(ステップST2001)。この指定位置は、GPS受信部190により受信された位置情報に基づき、指定するものとする。
識別情報送信部250は、識別情報DB240から指定された位置付近の識別情報を取得し、モバイル端末100の識別情報取得部150に送信する(ステップST2002)。
識別情報取得部150は、受信した識別情報を識別情報DB160に格納する(ステップST2003)。
モバイル端末100の画像撮影部120は、カメラ110を通じて、現在の場所の画像を撮影する(ステップST3001、第一のステップ)。
画像内識別情報抽出部140は、画像から看板、標識、距離標等に描かれた文字列等の識別情報、すなわち、文字列とその大きさを抽出する(ステップST3002、第二のステップ)。
識別情報比較部170は、画像内識別情報抽出部140によって抽出された識別情報と、識別情報DB160の識別情報とを比較し、対応する識別情報DB160の識別情報を特定する(ステップST3004、第四のステップ)。特定できた場合には、画面1301のカメラ映像を表示する領域1302の該当する文字列を強調表示する。
このとき、画像内識別情報抽出部140によって抽出された識別情報における文字列の大きさにより、この文字列までの距離を算出する。また、複数の文字列が特定された場合には、自己位置の方向も算出される。これらにより、自己位置を推定する。
すなわち、文字列を識別情報の特定に用い、文字列の大きさを距離の算出に用い、複数の文字列で自己位置の方向も算出する。
そして、推定した自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
図9は、この発明の実施の形態2による自己位置推定システムを示すブロック図である。
図9において、100〜250は図1におけるものと同一のものである。図9では、モバイル端末100に、マンホールを検出することで、自己位置を推定する自己位置推定補完部181を設けている。
図10は、実施の形態1の図8のフローチャートに、マンホールによる自己位置推定の補完処理を追加したものである。
図10のステップST3001、3002、3004、3005は図8における処理と同一の処理である。図10では、ステップST3002の処理の後に、識別情報を抽出できたかどうかの判断処理(ステップST3003)を追加し、抽出できなかった場合に、ステップST3101とステップST3102の処理を追加している。
次いで、自己位置推定補完部181は、検出したマンホールの位置及びマンホールとの距離から自己位置を推定する(ステップST3102)。自己位置推定補完部181は、推定した自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
なお、マンホールは、その位置が明確になっているものとする。
図11は、この発明の実施の形態3による自己位置推定システムを示すブロック図である。
図11において、100〜250は図1におけるものと同一のものである。図11では、モバイル端末100に、モーションステレオにより、モバイル端末100の移動量を推定する自己位置推定補完部182を設けている。
図12は、実施の形態1の図8のフローチャートに、連続するカメラ画像の変化量から移動量を推定する処理を追加したものである。
図12のステップST3001〜ステップST3005は、図10における処理と同一の処理である。図12では、ステップST3003で、識別情報を抽出できなかった場合の処理として、ステップST3201〜ステップST3203の処理を追加している。
次いで、自己位置推定補完部182は、抽出した特徴点の変化量(差分)から、モバイル端末100の移動方向および移動量を算出する(ステップST3202)。
次に、自己位置推定補完部182は、移動前の自己位置に基づき、ステップST3202で算出された移動方向および移動量から自己位置を推定する(ステップST3203)。自己位置推定補完部182は、推定した自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
図13は、この発明の実施の形態4による自己位置推定システムを示すブロック図である。
図13において、100〜250は図1におけるものと同一のものである。図13では、モバイル端末100に、加速度センサ111から計測した加速度と、ジャイロセンサ112から計測した角速度をもとに、モバイル端末100の移動方向および移動量を計算し、自己位置を推定する自己位置推定補完部183を設けている。
図14は、実施の形態1の図8のフローチャートに、加速度センサ111から計測した加速度と、ジャイロセンサ112から計測した角速度をもとに、モバイル端末100の移動方向および移動量を計算し、自己位置を推定する処理を追加したものである。
図14のステップST3001〜ステップST3005は、図10における処理と同一の処理である。図14では、ステップST3003で、識別情報を抽出できなかった場合の処理として、ステップST3301とステップST3302の処理を追加している。
次いで、自己位置推定補完部183は、移動前の自己位置に基づき、算出した移動方向および移動量から自己位置を推定する(ステップST3302)。自己位置推定補完部183は、推定した自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
図15は、この発明の実施の形態5による自己位置推定システムを示すブロック図である。
図15において、100〜140、200〜240は図1におけるものと同一のものである。図15では、モバイル端末100に、自己位置推定をサーバ200に要求する自己位置推定要求部184を設けている。また、サーバ200に、画像から抽出した識別情報と識別情報DB240(識別情報データベース)が保持する識別情報とを比較し、識別情報の対応付けを行なう識別情報比較部260と、対応付けられた識別情報からモバイル端末100の位置を推定する端末位置推定部270とを設けている。
図16は、実施の形態1の図8のフローチャートに対し、カメラ画像から現在の場所の識別情報を抽出した後の識別情報の比較処理と、自己位置推定処理をサーバ200で実施する流れに変更したものである。
図16のステップST3001、ステップST3002は、図8における処理と同一の処理である。図16では、ステップST3002の次の処理として、ステップST3401〜ステップST3405の処理を追加している。このうち、ステップST3402〜ステップST3405の処理は、サーバ200の処理である。
サーバ200の端末位置推定部270は、識別情報比較部260に識別情報の比較を要求する(ステップST3402)。
識別情報比較部260は、モバイル端末100から送られた識別情報(指定された識別情報)と識別情報DB240の識別情報とを比較し、モバイル端末100から送られた識別情報に対応する識別情報DB240の識別情報を特定する(ステップST3403)。
次いで、端末位置推定部270は、自己位置推定要求部184に推定結果を送信する(ステップST3405)。この送信される推定結果には、画面表示部130で表示するための画面表示情報が含まれる。自己位置推定要求部184は、推定された自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
また、演算能力の高いサーバで、識別情報比較処理を行うことで、自己位置推定時間が短縮できるという効果がある。
21 CPU、22 ROM、23 RAM、24 HDD、
100 モバイル端末、110 カメラ、111 加速度センサ、
112 ジャイロセンサ、120 画像撮影部、130 画面表示部、
140 画像内識別情報抽出部、150 識別情報取得部、160 識別情報DB、
170 識別情報比較部、180 自己位置推定部、181 自己位置推定補完部、
182 自己位置推定補完部、183 自己位置推定補完部、
184 自己位置推定要求部、190 GPS受信部、200 サーバ、
210 3Dモデル生成部、220 3DモデルDB、
230 3Dモデル識別情報抽出部、240 識別情報DB、250 識別情報送信部、260 識別情報比較部、270 端末位置推定部
Claims (11)
- カメラによって画像を撮影する画像撮影部、
この画像撮影部により撮影された画像内の識別情報を抽出する識別情報抽出部、
予め作成された位置情報を含む識別情報を有するサーバから、上記識別情報を取得する識別情報取得部、
上記識別情報抽出部により抽出された識別情報と、上記識別情報取得部により上記サーバから取得された識別情報とを比較し、両識別情報を対応付ける識別情報比較部、
およびこの識別情報比較部により対応付けられた識別情報に基づき、自己位置を推定する自己位置推定部を備えたことを特徴とするモバイル端末。 - 上記識別情報は、文字列であることを特徴とする請求項1に記載のモバイル端末。
- 上記画像撮影部によって撮影された画像から、道路上のマンホールを認識し、このマンホールの位置によって自己位置を推定することにより、上記自己位置推定部による推定を補完する自己位置推定補完部を備えたことを特徴とする請求項1または請求項2に記載のモバイル端末。
- 上記画像撮影部により直前に撮影された画像と現在の画像との差分から上記モバイル端末の移動方向および移動量を算出し、この移動方向および移動量によって自己位置を推定することにより、上記自己位置推定部による推定を補完する自己位置推定補完部を備えたことを特徴とする請求項1または請求項2に記載のモバイル端末。
- 上記モバイル端末に搭載されたセンサ類の計測値から上記モバイル端末の移動方向および移動量を推定し、この移動方向および移動量によって自己位置を推定することにより、上記自己位置推定部による推定を補完する自己位置推定補完部を備えたことを特徴とする請求項1または請求項2に記載のモバイル端末。
- 上記画像撮影部により撮影された画像を表示するとともに、上記識別情報比較部により上記両識別情報が対応付けられた場合に、上記表示された画像上の当該識別情報を強調表示する表示部を備えたことを特徴とする請求項1から請求項5のいずれか一項に記載のモバイル端末。
- 上記表示部は、上記自己位置推定部により推定された自己位置を、上記画像の表示領域とは別の画面領域に表示することを特徴とする請求項6に記載のモバイル端末。
- 請求項1から請求項7のいずれか一項に記載のモバイル端末、
および予め作成された位置情報を含む識別情報を格納した識別情報データベースを有するサーバを備えたことを特徴とする自己位置推定システム。 - 上記サーバは、
別途計測された3D点群データから3Dモデルを生成する3Dモデル生成部と、
この3Dモデル生成部により生成された3Dモデルから、位置情報を含む識別情報を抽出する3Dモデル識別情報抽出部とを有し、
上記識別情報データベースは、上記3Dモデル識別情報抽出部により抽出された識別情報を格納していることを特徴とする請求項8に記載の自己位置推定システム。 - 別途計測された3D点群データから3Dモデルを生成する3Dモデル生成部、
この3Dモデル生成部により生成された3Dモデルから、位置情報を含む識別情報を抽出する3Dモデル識別情報抽出部、
この3Dモデル識別情報抽出部により抽出された識別情報を格納した識別情報データベース、
モバイル端末から送信される識別情報と、上記識別情報データベースに格納された識別情報とを比較し、両識別情報を対応付ける識別情報比較部、
およびこの識別情報比較部により対応付けられた識別情報に基づき、上記モバイル端末の位置を推定する端末位置推定部を備えたことを特徴とするサーバ。 - 画像撮影部が、カメラによって画像を撮影する第一のステップ、
識別情報抽出部が、上記第一のステップにより撮影された画像内の識別情報を抽出する第二のステップ、
予め作成された位置情報を含む識別情報を有するサーバから、識別情報取得部により上記識別情報を取得する第三のステップ、
識別情報比較部が、上記第二のステップにより抽出された識別情報と、上記第三のステップにより上記サーバから取得された識別情報とを比較し、両識別情報を対応付ける第四のステップ、
および自己位置推定部が、上記第四のステップにより対応付けられた識別情報に基づき、自己位置を推定する第五のステップを含むことを特徴とする自己位置推定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104808A JP6727032B2 (ja) | 2016-05-26 | 2016-05-26 | モバイル端末およびこれを用いた自己位置推定システム並びにサーバおよび自己位置推定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104808A JP6727032B2 (ja) | 2016-05-26 | 2016-05-26 | モバイル端末およびこれを用いた自己位置推定システム並びにサーバおよび自己位置推定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017211284A true JP2017211284A (ja) | 2017-11-30 |
| JP6727032B2 JP6727032B2 (ja) | 2020-07-22 |
Family
ID=60475405
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016104808A Active JP6727032B2 (ja) | 2016-05-26 | 2016-05-26 | モバイル端末およびこれを用いた自己位置推定システム並びにサーバおよび自己位置推定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6727032B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020173299A (ja) * | 2019-04-09 | 2020-10-22 | エヌ・ティ・ティ・インフラネット株式会社 | 地図データ更新装置、地図データ更新方法、地図データ生成方法、地図データ更新プログラム |
| JP2023134924A (ja) * | 2022-03-15 | 2023-09-28 | 株式会社フジタ | カメラ位置情報管理方法、カメラ位置情報管理システム、建築現場監視システム、移動体位置情報管理方法、移動体位置情報管理システム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7703425B2 (ja) | 2021-10-29 | 2025-07-07 | 株式会社東芝 | 計測装置、計測システム、計測方法及びプログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09178497A (ja) * | 1995-12-26 | 1997-07-11 | Aisin Aw Co Ltd | 車両用ナビゲーション装置 |
| JPH10320464A (ja) * | 1997-05-16 | 1998-12-04 | Hitachi Ltd | 携帯型災害情報収集装置 |
| JP2008094377A (ja) * | 2006-09-14 | 2008-04-24 | Toyota Motor Corp | 車両用表示装置 |
| JP2009180631A (ja) * | 2008-01-31 | 2009-08-13 | Denso It Laboratory Inc | ナビゲーション装置、ナビゲーション方法およびプログラム |
| JP2009266003A (ja) * | 2008-04-25 | 2009-11-12 | Hitachi Ltd | 物体認識装置、および物体認識方法 |
| JP2011150687A (ja) * | 2009-12-25 | 2011-08-04 | Ricoh Co Ltd | 立体物識別装置、並びに、これを備えた移動体制御装置及び情報提供装置 |
| JP2011227888A (ja) * | 2010-03-31 | 2011-11-10 | Aisin Aw Co Ltd | 画像処理システム及び位置測位システム |
| JP2013200218A (ja) * | 2012-03-26 | 2013-10-03 | Zenrin Datacom Co Ltd | ナビゲーション装置、自律航法支援方法および自律航法支援プログラム |
-
2016
- 2016-05-26 JP JP2016104808A patent/JP6727032B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09178497A (ja) * | 1995-12-26 | 1997-07-11 | Aisin Aw Co Ltd | 車両用ナビゲーション装置 |
| JPH10320464A (ja) * | 1997-05-16 | 1998-12-04 | Hitachi Ltd | 携帯型災害情報収集装置 |
| JP2008094377A (ja) * | 2006-09-14 | 2008-04-24 | Toyota Motor Corp | 車両用表示装置 |
| JP2009180631A (ja) * | 2008-01-31 | 2009-08-13 | Denso It Laboratory Inc | ナビゲーション装置、ナビゲーション方法およびプログラム |
| JP2009266003A (ja) * | 2008-04-25 | 2009-11-12 | Hitachi Ltd | 物体認識装置、および物体認識方法 |
| JP2011150687A (ja) * | 2009-12-25 | 2011-08-04 | Ricoh Co Ltd | 立体物識別装置、並びに、これを備えた移動体制御装置及び情報提供装置 |
| JP2011227888A (ja) * | 2010-03-31 | 2011-11-10 | Aisin Aw Co Ltd | 画像処理システム及び位置測位システム |
| JP2013200218A (ja) * | 2012-03-26 | 2013-10-03 | Zenrin Datacom Co Ltd | ナビゲーション装置、自律航法支援方法および自律航法支援プログラム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020173299A (ja) * | 2019-04-09 | 2020-10-22 | エヌ・ティ・ティ・インフラネット株式会社 | 地図データ更新装置、地図データ更新方法、地図データ生成方法、地図データ更新プログラム |
| JP2023134924A (ja) * | 2022-03-15 | 2023-09-28 | 株式会社フジタ | カメラ位置情報管理方法、カメラ位置情報管理システム、建築現場監視システム、移動体位置情報管理方法、移動体位置情報管理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6727032B2 (ja) | 2020-07-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6532412B2 (ja) | 自己位置推定システム、自己位置推定方法、モバイル端末、サーバおよび自己位置推定プログラム | |
| EP3096290B1 (en) | Method and system for determining camera pose | |
| CN106471548B (zh) | 使用外围信息的加速模板匹配的方法和装置 | |
| JP6950832B2 (ja) | 位置座標推定装置、位置座標推定方法およびプログラム | |
| JP6759175B2 (ja) | 情報処理装置および情報処理システム | |
| CN101943580A (zh) | 目标物距离检测方法与装置及其电脑程序产品 | |
| KR101223741B1 (ko) | 도화이미지의 왜곡 보정을 위한 현장 지형의 측지 및 측량시스템 | |
| KR102622585B1 (ko) | 실내 길안내 장치 및 그 방법 | |
| CN110426725B (zh) | 一种精确定位室内用户移动终端的方法 | |
| JP6165422B2 (ja) | 情報処理システム、情報処理装置、サーバ、端末装置、情報処理方法、及びプログラム | |
| KR20190114696A (ko) | 표고차를 고려한 지하관로의 관리를 위한 증강 현실 표현 방법 및 이를 기록한 기록매체 | |
| KR100878781B1 (ko) | 휴대 단말기를 이용하여 구조물의 크기 및 좌표를 측정하는측량 방법 | |
| KR102463698B1 (ko) | 도로표지판의 위치정보 데이터베이스 구축 시스템 및 그 방법과 이를 이용한 차량의 위치 추정 장치 및 그 방법 | |
| JP5910729B2 (ja) | 位置判定システム、位置判定方法、コンピュータプログラム及び位置判定装置 | |
| JP6727032B2 (ja) | モバイル端末およびこれを用いた自己位置推定システム並びにサーバおよび自己位置推定方法 | |
| CN107003385B (zh) | 以无线信号信息标记视觉数据 | |
| JP2014075714A (ja) | 測位方法、測位システム及びそのプログラム | |
| JP6546940B2 (ja) | 方位推定装置、撮影・地図表示装置、方法、及びプログラム | |
| JP7075090B1 (ja) | 情報処理システム、及び、情報処理方法 | |
| WO2024057779A1 (ja) | 情報処理装置、プログラムおよび情報処理システム | |
| Jeon et al. | Design of positioning DB automatic update method using Google tango tablet for image based localization system | |
| JP6959305B2 (ja) | 生成装置、生成方法、および生成プログラム | |
| JP7750374B2 (ja) | 通報支援システム及び通報支援方法 | |
| KR100878780B1 (ko) | 휴대 단말기를 이용하여 구조물의 크기 및 좌표를 측정하는측량 시스템 | |
| JP7703425B2 (ja) | 計測装置、計測システム、計測方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191016 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20191016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200630 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6727032 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |