JP2017211911A - 装着型機器、装着型機器システム、装着型機器の制御方法、装着型機器の制御装置および制御プログラム - Google Patents
装着型機器、装着型機器システム、装着型機器の制御方法、装着型機器の制御装置および制御プログラム Download PDFInfo
- Publication number
- JP2017211911A JP2017211911A JP2016106135A JP2016106135A JP2017211911A JP 2017211911 A JP2017211911 A JP 2017211911A JP 2016106135 A JP2016106135 A JP 2016106135A JP 2016106135 A JP2016106135 A JP 2016106135A JP 2017211911 A JP2017211911 A JP 2017211911A
- Authority
- JP
- Japan
- Prior art keywords
- wearable device
- information
- user
- unit
- physical quantity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/163—Wearable computers, e.g. on a belt
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/024—Measuring pulse rate or heart rate
- A61B5/0245—Measuring pulse rate or heart rate by using sensing means generating electric signals, i.e. ECG signals
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
- G06F1/169—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being an integrated pointing device, e.g. trackball in the palm rest area, mini-joystick integrated between keyboard keys, touch pads or touch stripes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/014—Hand-worn input/output arrangements, e.g. data gloves
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/015—Input arrangements based on nervous system activity detection, e.g. brain waves [EEG] detection, electromyograms [EMG] detection, electrodermal response detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/38—Transceivers, i.e. devices in which transmitter and receiver form a structural unit and in which at least one part is used for functions of transmitting and receiving
- H04B1/3827—Portable transceivers
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Computer Hardware Design (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Cardiology (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Signal Processing (AREA)
- Biophysics (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Dermatology (AREA)
- Neurology (AREA)
- Neurosurgery (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Pathology (AREA)
- Physiology (AREA)
- Computer Networks & Wireless Communication (AREA)
- User Interface Of Digital Computer (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
- Transceivers (AREA)
Abstract
【課題】ユーザが物理量を体感できる装着型機器を提供する。【解決手段】装着型機器は、第1通信部と、刺激部と、第1処理部とを備える。第1通信部は、物理量に基づく第1情報を受信する。刺激部は、可制御の刺激量で第1ユーザの皮膚の感覚器を刺激する。第1処理部は、前記第1情報に基づいて、前記物理量を前記感覚器で再現するように、前記刺激部に前記感覚器を刺激させる。【選択図】図3
Description
本開示は、装着型機器、装着型機器システム、装着型機器の制御方法、装着型機器の制御装置および制御プログラムに関する。
特許文献1にも記載されているように、従来から装着型機器に関して様々な技術が提案されている。
装着型機器は、ユーザの皮膚の感覚器を刺激するのに適している。なぜなら、ユーザが装着型機器を装着した状態では、装着型機器は直接または衣服を介して、ユーザの皮膚に対面するからである。
しかしながら、装着型機器によるユーザの皮膚の感覚器の刺激方法については、従来、あまり考慮されていなかった。
また、ユーザが仮想的な感覚を体験できることが望まれている。言い換えれば、ユーザは物理量(例えば温度など)を体感できることが望まれている。
そこで、本発明は、ユーザが物理量を体感できる装着型機器を提供することを目的とする。
装着型機器、装着型機器システム、装着型機器の制御方法、装着型機器の制御装置および制御プログラムが開示される。装着型機器は、第1通信部と、刺激部と、第1処理部とを備える。第1通信部は、物理量に基づく第1情報を受信する。刺激部は、可制御の刺激量で第1ユーザの皮膚の感覚器を刺激する。第1処理部は、第1情報に基づいて、物理量を当該感覚器で再現するように、刺激部に当該感覚器を刺激させる。
他の一実施の形態では、装着型機器システムは、互いに通信可能な第1装着型機器および第2装着型機器を備える。第1装着型機器はセンサを備える。センサは物理量を検出する。第2装着型機器は、刺激部と、処理部とを備える。刺激部は、可制御の刺激量でユーザの感覚器を刺激する。処理部は、物理量を当該感覚器で再現するように、刺激部に当該感覚器を刺激させる。
他の一実施の形態では、装着型機器の制御方法は、第1工程と、第2工程とを備える。第1工程においては、物理量に基づく第1情報を受信する。第2工程においては、第1情報に基づいて、物理量をユーザの感覚器で再現するように、刺激部に感覚器を刺激させる。
他の一実施の形態では、装着型機器は、第1通信部と、刺激部とを備える。第1通信部は、物理量に基づく第1情報を受信する。刺激部は、可制御の刺激量で第1ユーザの皮膚の感覚器を刺激する。装着型機器の制御装置は、第1情報に基づいて、物理量を当該感覚器で再現するように、刺激部に当該感覚器を刺激させる処理部を備える。
他の一実施の形態では、装着型機器は、第1通信部と、刺激部とを備える。第1通信部は、物理量に基づく第1情報を受信する。刺激部は、可制御の刺激量で第1ユーザの皮膚の感覚器を刺激する。制御プログラムは、装着型機器に、第1情報に基づいて、物理量を当該感覚器で再現するように、刺激部に当該感覚器を刺激させる処理を実行させる。
ユーザが物理量を体感できる。
<装着型機器の外観>
図1は、装着型機器1の外観の一例を概略的に示す斜視図である。この装着型機器1はユーザに装着される。図1の例示では、装着型機器1として、腕輪型の機器が示されている。ただし、装着型機器1は必ずしもこれに限らない。例えば装着型機器1は、指輪型、イヤホン型、ヘッドフォン型などの任意の装着型機器であってよい。以下では、一例として、装着型機器1が腕輪型の機器である場合について説明する。
図1は、装着型機器1の外観の一例を概略的に示す斜視図である。この装着型機器1はユーザに装着される。図1の例示では、装着型機器1として、腕輪型の機器が示されている。ただし、装着型機器1は必ずしもこれに限らない。例えば装着型機器1は、指輪型、イヤホン型、ヘッドフォン型などの任意の装着型機器であってよい。以下では、一例として、装着型機器1が腕輪型の機器である場合について説明する。
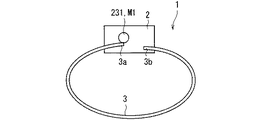
図1の例示では、装着型機器1は、本体部2と、バンド部3とを備えている。バンド部3は帯状の板状形状を有しており、その両端が本体部2に取り付けられている。これにより、装着型機器1は環状の形状を形成する。ユーザは、装着型機器1のバンド部3を腕に嵌めることによって、装着型機器1を装着することができる。
本体部2は、後述する機械的構成および電気的構成を収納している。例えば本体部2は平板状の形状を有していてもよい。図1に例示するように、本体部2は、例えば長方形の板状形状を有していてもよい。
また、図1に例示するように、この本体部2の外周側の表面には、例えば表示領域251が設けられてもよい。この表示領域251には、後述する表示部25によって種々の情報が表示される。ユーザはこの表示領域251を視認することにより、種々の情報を知ることができる。例えば、表示部25は時刻を表示領域251に表示してもよい。表示部25が時刻を表示する場合には、装着型機器1はいわゆる腕時計としても機能する。
<システムの概要>
図2は、装着型機器システム100の構成の一例を概略的に示す図である。図2に例示するように、装着型機器システム100は複数の装着型機器1を備えている。図2の例示では、2つの装着型機器1が示されている。これらの装着型機器1は互いに通信可能である。なお、装着型機器1は相互に直接に通信してもよく、あるいは、不図示の外部装置(例えば、スマートフォンなどの携帯機器、基地局およびサーバの少なくともいずれか一つ)を介して通信してもよい。
図2は、装着型機器システム100の構成の一例を概略的に示す図である。図2に例示するように、装着型機器システム100は複数の装着型機器1を備えている。図2の例示では、2つの装着型機器1が示されている。これらの装着型機器1は互いに通信可能である。なお、装着型機器1は相互に直接に通信してもよく、あるいは、不図示の外部装置(例えば、スマートフォンなどの携帯機器、基地局およびサーバの少なくともいずれか一つ)を介して通信してもよい。
以下では、これら2つの装着型機器1を区別すべく、それぞれを装着型機器1A,1Bと呼ぶことがある。装着型機器1AはユーザUAに装着され、装着型機器1BはユーザUBに装着される。図2の例示では、それぞれ装着型機器1A,1BがユーザUA,UBの腕(例えば手首)に装着されている。
<装着型機器の電気的構成>
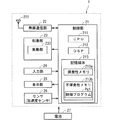
図3は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。装着型機器1は、制御部21と、無線通信部22と、刺激部23と、入力部24と、表示部25と、センサ26と、電池27とを備えている。
図3は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。装着型機器1は、制御部21と、無線通信部22と、刺激部23と、入力部24と、表示部25と、センサ26と、電池27とを備えている。
制御部21は例えば本体部2に収納されている。この制御部21は、一種の演算処理装置であって、一種の電気回路でもある。制御部21は、例えば、CPU(Central Processing Unit)211、DSP(Digital Signal Processor)212及び記憶媒体213等を備えている。制御部21は、装着型機器1の他の構成要素を制御することによって、装着型機器1の動作を統括的に管理することが可能である。制御部21は、例えば、SoC(System-on-a-Chip)、MCU(Micro Control Unit)及びFPGA(Field-Programmable Gate Array)等の副処理装置(co-processor)をさらに含んでも良い。この場合には、制御部21は、CPU211及び副処理装置を互いに協働させて各種の制御を行って良いし、両者を切り替えながら用いて各種の制御を行って良い。制御部21は制御装置とも言える。
記憶媒体213は、RAM(Random Access Memory)などの揮発性メモリ213aと、フラッシュROM(Read Only Memory)などの不揮発性メモリ213bとを備えている。揮発性メモリ213a及び不揮発性メモリ213bのそれぞれは、CPU211及びDSP212が読み取り可能な非一時的な記憶媒体である。不揮発性メモリ213bには、装着型機器1を制御するための複数の制御プログラムPg1が記憶されている。制御部21の各種機能は、CPU211及びDSP212が記憶媒体213内の各種制御プログラムPg1を実行することによって実現される。
なお、制御部21の全ての機能あるいは制御部21の一部の機能は、その機能の実現にソフトウェアが不要なハードウェア回路によって実現されても良い。要するに、制御部21は回路によって構成されていればよい。また、記憶媒体213は、ROM及びRAM以外の、コンピュータが読み取り可能な非一時的な記憶媒体を備えても良い。記憶媒体213は、例えば、小型のハードディスクドライブ及びSSD(Solid State Drive)などを備えても良い。
また記憶媒体213とともに、あるいは、記憶媒体213に替えて、別の記憶媒体が制御部21の外部に設けられてもよい。後述する情報の記憶先は記憶媒体213であってもよく、制御部21の外部の記憶媒体であってもよい。
無線通信部(通信回路)22は例えば本体部2に収納されており、アンテナ221を有している。無線通信部22は、アンテナ221を用いて、制御部21による制御よって無線通信を行うことが可能である。無線通信部22は、装着型機器1とは別の装着型機器1からの信号を、例えば基地局等を介して、または、直接に、アンテナ221で受信することが可能である。無線通信部22は、受信信号に対して増幅処理及びダウンコンバートを行って制御部21に出力することが可能である。制御部21は、入力される受信信号に対して復調処理等を行って、当該受信信号に含まれるユーザデータ及び制御データ等を取得することが可能である。また無線通信部22は、制御部21で生成された送信信号に対してアップコンバート及び増幅処理を行って、処理後の送信信号をアンテナ221から無線送信することが可能である。アンテナ221からの送信信号は、例えば基地局等を介して、または、直接に、別の装着型機器1で受信される。
刺激部23は、装着型機器1がユーザに装着された状態において、可制御の刺激量でユーザの皮膚の感覚器を刺激することができる。また、この刺激部23は制御部21によって制御される。皮膚の感覚器には、触覚、圧覚または温度覚に対応する受容器が含まれており、刺激部23はこの受容器に対して刺激を与えることが可能である。
図3の例示では、刺激部23は、バンド部3と、締付機構231とを備えている。バンド部3はユーザの体の一部(例えば腕)に巻き付けられる。締付機構231は、バンド部3を用いて、可制御の締め付け力でユーザの体の当該一部(例えば腕)を締め付けることができる。換言すれば、この刺激部23は、ユーザの皮膚の圧覚の受容器を可制御の刺激量で刺激することが可能である。
図4は、装着型機器1の構成の一例を概略的に示す図である。図4の例示では、主として刺激部23に関する構成要素が示されており、これ以外の構成要素については、図の煩雑を避けるために、適宜に図示を省略している。後に参照する図5〜図7についても同様である。図4に例示するように、締付機構231は例えば本体部2に収納されている。この締付機構231は例えばモータM1を有していてもよい。このモータM1は制御部21によって制御されて回転する。モータM1は任意のモータであってよく、例えば直流モータまたは交流モータであってよい。例えば電池27とモータM1との間に、所定の電力変換部が設けられてもよい。この電力変換部は、制御部21によって制御されて、電池27からの電圧を所望の電圧に変換し、変換後の電圧をモータM1へと出力する。モータM1はこの電圧に応じて回転する。
モータM1には、バンド部3の一端3aが固定されている。またバンド部3の他端3bは、例えば本体部2の内部において、固定されている。このバンド部3は外力によって、主として自身の法線方向に、湾曲変形することが可能である。よって、モータM1が所定方向(図4では時計回り)に回転することにより、モータM1はバンド部3の一部を巻き取ることができる。このようなバンド部3は例えば弾性材料(例えば合成樹脂)、繊維(例えば合成繊維)または金属などの材料によって形成できる。
図5は、装着型機器1の構成の一例を概略的に示している。図5の例示では、モータM1には、バンド部3の一部が巻き付いている。つまり、バンド部3がモータM1によって巻き取られている。よって、バンド部3のうち本体部2から延びる部分の周の長さは、図4の装着型機器1のそれに比べて短い。つまり、モータM1がバンド部3の一部を巻き取ることによって、バンド部3がユーザの腕を締め付けることができる。制御部21は、例えばモータM1の出力トルクを制御することで、締め付け力を制御することができる。
逆に、モータM1が所定方向とは反対方向に回転することにより、本体部2から延びるバンド部3の周の長さが長くなる。これにより、モータM1はバンド部3による腕の締め付けを緩めることができる。
このような刺激部23は、バンド部3による締め付けおよび緩和により、ユーザの腕の皮膚の例えば圧覚の受容器を刺激することができる。つまり、ユーザは、バンド部3による締め付け具合を知覚することができる。
なお上述の例では、締付機構231が、本体部2から延びるバンド部3の周の長さを変更することで、バンド部3による締め付けを制御しているものの、必ずしもこれに限らない。例えばバンド部3の厚みが変更可能となるようにバンド部3が構成され、締付機構231がこの厚みを変更することによって、バンド部3による締め付けを制御してもよい。
図6は、装着型機器1の構成の他の一例を概略的に示す図である。図6の例示では、締付機構231は例えばポンプPP1を有している。ポンプPP1は制御部21によって制御される。バンド部3は、その厚みが膨張可能となるように形成されている。例えば、バンド部3は合成樹脂(例えばポリエチレン系などの樹脂)、弾性材料(例えばゴム)または繊維(例えば合成繊維)などの材料によって構成されており、その内部にポンプPP1に連なる内部空間が形成されている。例えば、この内部空間は、ポンプPP1との連結部のみにおいて開口している。要するに、内部空間は、ポンプPP1に開口した袋状に形成される。ポンプPP1は外部からの空気を当該内部空間に送り込んだり、内部空間の空気を外部へと吐出することができる。
この内部空間へと、ポンプPP1によって空気が送り込まれることによって、バンド部3は少なくとも内周側に膨張する。なお、バンド部3は内周側および外周側の両方に膨張してもよい。図7は、バンド部3が膨張した状態における装着型機器1の構成の他の一例を概略的に示している。バンド部3が内周側に向けて膨張するので、バンド部3が囲む空間が狭くなる。つまり、ポンプPP1はバンド部3を用いてユーザの腕を締め付けることができる。制御部21はポンプPP1による空気の流量を制御することで、締め付け力を制御することができる。一方で、ポンプPP1が内部空間の空気を吸い込むことによって、バンド部3はその厚み方向に収縮する。これにより、バンド部3が囲む空間が広がる。つまり、ポンプPP1はバンド部3によるユーザの腕の締め付けを緩めることができる。
なお、バンド部3による締め付けの為には、バンド部3のうち内周側の部材が膨張および収縮できればよい。要するに、バンド部3のうち内周側の部材が、例えばポリエチレン系などの合成樹脂、弾性材料(例えばゴム)または繊維(例えば合成繊維)などの材料によって形成されればよい。
また上述の例では、バンド部3の厚みを、空気という流体を用いて制御しているものの必ずしもこれに限らない。例えばバンド部3の厚みを機械的に制御してもよい。具体的な一例として、いわゆるZ軸ステージのような、回転を厚みに変換する装置を利用してもよい。当該装置に対する回転は、モータによって与えられてもよい。この場合、モータが回転することで、当該装置の厚みが変化する。
そして、当該装置の厚みがバンド部3の厚み方向に沿うように、当該装置をバンド部3の内部に設ける。例えばバンド部3を袋状に構成し、その内部に当該装置を収納する。当該装置は複数設けられてもよい。この場合、例えば、当該装置の複数を周方向に沿って配置してもよい。そして、制御部21がモータを制御することにより、当該装置の厚み、ひいてはバンド部3の厚みを制御する。これにより、ユーザの腕の締め付け、および、緩和を制御することができる。
入力部24は例えば本体部2に設けられており、ユーザによる装着型機器1への入力を受け付けることができる。例えば、入力部24は操作ボタンを含んでもよい。入力部24は、ユーザが操作ボタンを操作したときに、操作ボタンが操作されたことを示す電気信号を制御部21へと出力する。制御部21は、この電気信号に応じた処理を行うことが可能である。
あるいは、入力部24はタッチパネルであってもよい。タッチパネルは、例えば、投影型静電容量方式のタッチパネルを含んでもよい。このタッチパネルは、表示領域251に対する指などの操作子による操作を検出することが可能である。ユーザが指などの操作子によって表示領域251に対して操作を行うと、タッチパネルは、その操作に応じた電気信号を制御部21に出力する。これにより、制御部21は、タッチパネルからの電気信号に基づいて、表示領域251に対して行われた操作の内容を特定して、その内容に応じた処理を行うことが可能である。なお、ユーザは、指以外の操作子、例えば、スタイラスペンなどの静電式タッチパネル用ペンで表示領域251を操作することによっても、装着型機器1に対して各種指示を与えることができてもよい。
あるいは、装着型機器1は音声入力機能を有していてもよい。この場合、入力部24は音入力部(例えばマイク)を含み、制御部21は音声認識機能を有している。この入力部24は、外部から入力された音を音信号に変換して、制御部21へと出力することができる。制御部21は、入力された音信号に基づいて、音声認識機能により、言葉を認識する。そして、制御部21はその言葉が予め登録された言葉と一致するときに、その言葉に応じた処理を実行する。これによれば、ユーザは音声によって装着型機器1に各種の指示を入力することができる。
表示部25は例えば本体部2に収納されている。この表示部25は制御部21によって制御されて、表示領域251に各種の情報を表示することができる。表示部25は、例えば、液晶表示パネルまたは有機EL(Electro Luminescence)パネルであってもよい。
センサ26は例えば本体部2またはバンド部3に設けられている。このセンサ26は所定の物理量を検出し、その検出結果を制御部21へと出力することができる。例えばセンサ26は感圧センサである。この感圧センサは例えば接点式感圧センサであってよく、感圧抵抗を有していてもよい。この感圧抵抗の抵抗値は、当該感圧抵抗に印加された力に応じて変化する。よって、制御部21は、センサ26に印加された力を、感圧抵抗の電圧および電流に基づいて検出することができる。言い換えれば、センサ26は、自身に印加された力を電気信号に変換して、その電気信号を制御部21へと出力する。制御部21は当該電気信号に基づいて、センサ26に印加された力を認識することができる。
電池27は例えば本体部2に収納されており、装着型機器1の電源を出力することが可能である。電池27から出力される電源は、装着型機器1が備える制御部21および無線通信部22などの各種構成に対して供給される。
図8は、制御部21の内部構成の一例を概略的に示す機能ブロック図である。制御部21は、送受信処理部201と、刺激処理部202とを備えている。送受信処理部201は、センサ26によって検出された物理量に基づく情報(後述)を、無線通信部22を介して、別の装着型機器1へと送信することができる。なお以下では、この物理量の基づく情報を、物理情報とも呼ぶ。また送受信処理部201は物理情報を別の装着型機器1から受信することができる。物理情報とは、例えば物理量そのものを示す情報であってもよい。つまり、物理情報はセンサ26の検出値であってもよい。物理情報の他の例については、後に述べる。
刺激処理部202は、受信した物理情報に基づいて、その物理量をユーザの皮膚の感覚器で再現するように、刺激部23にユーザの皮膚の感覚器を刺激させる。以下、図9を参照して、具体的な一例について説明する。図9は、装着型機器システム100の一例を概略的に示す図である。なお以下では、装着型機器1Aに属する構成要素については、その符号の末尾に「A」を付記し、装着型機器1Bに属する構成要素については、その符号の末尾に「B」を付記することがある。例えば制御部21Aは装着型機器1Aの制御部21を示し、刺激部23Bは装着型機器1Bの刺激部23を示す。
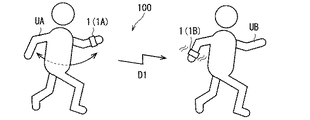
例えば図9に示すように、ユーザUAは、装着型機器1Aが装着されていない方の手を用いて装着型機器1Aを把持し、これを握りしめる。これにより、センサ26Aには力Fが印加される。センサ26Aはこの力Fを検出し、その検出結果を制御部21Aへと出力する。送受信処理部201Aは、例えばセンサ26Aの検出値を示す物理情報D1を、無線通信部22Aを介して装着型機器1Bへと送信する。
装着型機器1Bの送受信処理部201Bは、無線通信部22Bを介して物理情報D1を受信する。刺激処理部202Bは物理情報D1に基づいて締付機構231Bを制御する。より具体的には、刺激処理部202Bは、センサ26Aによって検出された力Fを締め付け力で再現すべく、締付機構231Bに、バンド部3Bを用いてユーザUBの体の一部(例えば腕)を締め付けさせる。
刺激処理部202Bは、いわゆるフィードフォワード制御によってモータM1を制御してもよい。この場合、例えば力と電圧値との関係を予め記憶媒体213に記憶しておく。刺激処理部202Bは、力Fに対応する電圧値を、当該関係に基づいて決定し、当該電圧値をモータM1Bに印加してもよい。あるいは、刺激処理部202Bはフィードバック制御によってモータM1Bを制御してもよい。この場合、例えば、刺激処理部202Bは、センサ26Bによって検出される力と、力Fとの偏差を算出し、当該偏差が零に近づくように、当該偏差に基づいてモータM1Bを制御してもよい。これによれば、装着型機器1Bにおいて、より正確に力Fを再現することができる。
なおこの例では、物理量を再現する制御とは、当該物理量を目標値(或いは指令値)として用いた刺激部23の制御である、と捉えても構わない。
以上のように、ユーザUAが腕を握りしめたときに、その力Fに応じた締め付け力で、ユーザUBの腕が締め付けられる。これにより、ユーザUBはユーザUAによる腕の握りしめを擬似的に体感することができる。例えばユーザUAが親であり、ユーザUBが子供である場合、親が自身の腕を子供の腕と想定して優しく握りしめることができる。その一方で、子供は親による腕の握りしめを擬似的に体感することができる。これにより、子供を安心させることができる。
なお、送受信処理部201Aは、センサ26Aによって検出される物理量が所定の基準値よりも大きいときのみ、物理情報を送信してもよい。言い換えれば、物理量が小さすぎる場合には、送受信処理部201Aは、物理情報を装着型機器1Bへと送信しなくてもよい。これによれば、ノイズなどによって物理量がわずかに増大しても、その物理情報は送信されない。したがって、不要な送信を抑制することができる。
図10および図11は、それぞれ装着型機器1A,1Bの動作の一例を示すフローチャートである。図10および図11の一連の動作は、例えば所定時間ごとに繰り返し実行されてもよい。図10を参照して、ステップS1にて、センサ26Aは物理量(例えば力F)を検出し、その検出結果を制御部21Aへと出力する。次にステップS2にて、送受信処理部201Aは、センサ26Aによって検出された物理量が基準値よりも大きいか否かを判断する。この基準値は予め決められて記憶媒体に記憶されてもよく、例えば零に近い正の値であってよい。物理量が基準値よりも大きいと判断したときには、ステップS3にて、送受信処理部201Aは、物理量に基づく情報(物理情報)を、無線通信部22Aを介して、装着型機器1Bへと送信する。一方で、ステップS2において物理量が基準値よりも小さいと判断したときには、制御部21Aは処理を終了する。
なお、ステップS2は必ずしも必要ではない。送受信処理部201は、ステップS2の判断を行うことなく、物理量に基づく物理情報を送信してもよい。この点は、後述する他のフローチャートでも同様である。
図11を参照して、ステップS11にて、装着型機器1Bの送受信処理部201Bは、物理量に基づく情報(物理情報)を、無線通信部22Bを介して受信したか否かを判断する。物理情報を受信していないと判断したときには、送受信処理部201Bは再びステップS11を実行する。物理情報を受信したと判断したときには、ステップS12にて、刺激処理部202Bは、物理量をユーザの皮膚の感覚器で再現すべく、当該物理情報に基づいて、刺激部23Bにユーザの感覚器を刺激させる。例えば刺激処理部202Bは上述のようにモータM1Bを物理情報に基づいて制御して、バンド部3Bを用いてユーザUBの腕を締め付ける。
なお、上述の例では、装着型機器1Aから装着型機器1Bへと物理情報を送信しているものの、その逆に、装着型機器1Bが装着型機器1Aへと物理情報を送信してもよい。つまり、装着型機器1Bがセンサ26Bによって検出された物理量に基づく情報を、装着型機器1Aへと送信し、装着型機器1Aがその物理情報に基づいてユーザUAの腕を締め付けてもよい。これによれば、ユーザUBは自身の腕をユーザUAの腕と想定して握りしめることができ、ユーザUAはユーザUBによる握りしめを擬似的に体感することができる。言い換えれば、図10の動作を装着型機器1Bが行い、図11の動作を装着型機器1Aが行ってもよい。この点は、後述する他のフローチャートでも同様である。
またこの装着型機器1によれば、ユーザによる腕の握りしめを、ユーザ間の合図として用いることもできる。例えば1回の握りしめを、「こんにちは」などの挨拶の合図として用いることができる。これによって、ユーザUA,UBは装着型機器1を用いて意思疎通を図ることができる。このような意思疎通は、ユーザUA,UBによる会話を必要としないので、例えばユーザUA,UBが水中に居る場合に特に有効である。また、装着型機器1を用いた意思疎通によれば、伝えたい内容が他の人にばれにくい。よって、集団の中において、ユーザは他の人に秘匿しながら、特定のユーザに意図を伝えることができる。また、装着型機器1を用いた意思疎通は、例えばジェスチャーによる意思疎通(例えば手話)とは異なって、ユーザUA,UBの相互視認を必要としない。よって、ユーザUA,UBが相互に視認できない状態であっても、意思疎通を図ることができる。
なお合図は、例えば握りしめパターンによって表現されてもよい。例えばこのパターンは、握りしめの回数、握りしめが維持される時間、握りしめの時間間隔、および、握る力の少なくともいずれか一つによって表現される。
また、上述の制御によれば、例えば装着型機器1Aが物にぶつかって衝撃を受けたときには、その衝撃の力が装着型機器1BによってユーザUBの皮膚の感覚器で再現される。したがって、ユーザUBは、ユーザUAの腕と物の衝突も擬似的に体感することができる。
<物理量に基づく情報>
上述の例では、物理量に基づく物理情報の具体例として、センサ26によって検出された物理量の値を示す情報を採用した。しかるに、例えば締付機構231がモータM1を備えている場合、装着型機器1は、物理量に基づく物理情報として、例えば、センサ26によって検出される物理量を再現するためにモータM1に印加すべき電圧値を、採用してもよい。そして、刺激処理部202は、受信した電圧値に基づいてモータM1を制御してもよい。要するに、装着型機器1は、物理量を再現するための刺激部23の制御に必要な情報を、物理量に基づく物理情報として送信すればよい。
上述の例では、物理量に基づく物理情報の具体例として、センサ26によって検出された物理量の値を示す情報を採用した。しかるに、例えば締付機構231がモータM1を備えている場合、装着型機器1は、物理量に基づく物理情報として、例えば、センサ26によって検出される物理量を再現するためにモータM1に印加すべき電圧値を、採用してもよい。そして、刺激処理部202は、受信した電圧値に基づいてモータM1を制御してもよい。要するに、装着型機器1は、物理量を再現するための刺激部23の制御に必要な情報を、物理量に基づく物理情報として送信すればよい。
<物理量に基づく物理情報の送信態様>
図10の動作を繰り返すことにより、装着型機器1は、基準値よりも大きな物理量を検出する度に、その物理量に基づく物理情報を送信できる。しかるに、装着型機器1は必ずしも検出の度に物理情報を送信する必要はない。例えば装着型機器1は、複数回にわたって物理量を検出したときに、その複数の物理量をまとめた物理情報(例えば物理量の時系列データ)を送信してもよい。装着型機器1Bは、この物理情報に基づいて、物理量をユーザの皮膚の感覚器で再現すべく、ユーザの皮膚の感覚器を刺激してもよい。これによれば、物理情報の送信回数を低減することができる。
図10の動作を繰り返すことにより、装着型機器1は、基準値よりも大きな物理量を検出する度に、その物理量に基づく物理情報を送信できる。しかるに、装着型機器1は必ずしも検出の度に物理情報を送信する必要はない。例えば装着型機器1は、複数回にわたって物理量を検出したときに、その複数の物理量をまとめた物理情報(例えば物理量の時系列データ)を送信してもよい。装着型機器1Bは、この物理情報に基づいて、物理量をユーザの皮膚の感覚器で再現すべく、ユーザの皮膚の感覚器を刺激してもよい。これによれば、物理情報の送信回数を低減することができる。
<送信先の指定>
装着型機器1は2以上の別の装着型機器1と通信可能であってもよい。この場合、入力部24は、送信先を指定するための入力を受け付けてもよい。例えば記憶媒体213には、複数の別の装着型機器1にそれぞれ割り当てられた複数の宛先情報が記憶されている。入力部24は、この複数の宛先情報の一つを指定するための入力を受け付けてもよい。以下に、具体的な処理の一例を説明する。
装着型機器1は2以上の別の装着型機器1と通信可能であってもよい。この場合、入力部24は、送信先を指定するための入力を受け付けてもよい。例えば記憶媒体213には、複数の別の装着型機器1にそれぞれ割り当てられた複数の宛先情報が記憶されている。入力部24は、この複数の宛先情報の一つを指定するための入力を受け付けてもよい。以下に、具体的な処理の一例を説明する。
制御部21は、記憶媒体213から複数の宛先情報を読み出し、これらの情報を表示部25に一覧で表示させる。なお、制御部21は宛先情報に替えて、或いは、宛先情報とともに、その宛先情報で示される装着型機器1のユーザ情報(例えばユーザの名前)を表示してもよい。このユーザ情報は、例えば、宛先情報に対応付けられて記憶媒体213に記憶されていてもよい。このようにユーザ情報が表示される場合には、ユーザは送信先を選択しやすい。
ユーザは、表示領域251を見て複数の宛先情報を確認しつつ、入力部24を用いて、そのうちの一つを指定する。例えば入力部24がタッチパネルである場合、ユーザは、表示領域251において宛先情報(あるいはユーザ情報)が表示された部分を、操作子(例えば指)で操作する。入力部24は当該操作を検出して、その情報を制御部21へと出力する。制御部21(送受信処理部201)はこの情報に基づいて、操作された宛先情報を送信先に設定する。そして、送受信処理部201は、センサ26によって検出された物理量に基づく情報を、設定された送信先へと送信する。
<複数の送信先の指定>
入力部24は、複数の送信先を指定するための入力を受け付けてもよい。制御部21は当該入力に応答して、複数の宛先情報を送信先に設定する。そして、送受信処理部201は、センサ26によって検出された物理量に基づく情報を、設定された複数の装着型機器1へと送信する。
入力部24は、複数の送信先を指定するための入力を受け付けてもよい。制御部21は当該入力に応答して、複数の宛先情報を送信先に設定する。そして、送受信処理部201は、センサ26によって検出された物理量に基づく情報を、設定された複数の装着型機器1へと送信する。
これによれば、例えば、ユーザが装着型機器1を握りしめることにより、他の複数のユーザの腕がそれぞれの装着型機器1によって締め付けられる。したがって、例えば親が複数の子供に対して擬似的に腕を握りしめることができる。逆に言えば、複数の子供が親の握りしめを擬似的に体感できる。
あるいは、ユーザは他の複数のユーザに対して合図を送ることができる。例えば複数のユーザ(例えば家族)の間で、ある握りしめのパターンを、所定の集合場所で集合するための合図に決めておく。そして、一人のユーザがそのパターンで装着型機器1を握りしめることにより、他の全てのユーザにその合図を伝えることができる。合図を受けたユーザは集合場所に移動することで、全てのユーザが集合する。
<温度>
<温度変化の再現>
図12は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。図12の装着型機器1は、刺激部23およびセンサ26という点で、図3の装着型機器1と相違する。
<温度変化の再現>
図12は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。図12の装着型機器1は、刺激部23およびセンサ26という点で、図3の装着型機器1と相違する。
図12の例示では、センサ26は、例えば物理量として温度を検出する温度センサである。温度センサは、例えば温度検出用の温度抵抗を有していてもよい。この温度抵抗の抵抗値は、温度に依存して変化する。よって、制御部21は温度抵抗の温度を、温度抵抗の電圧および電流に基づいて検出することができる。言い換えれば、センサ26は温度を電気信号に変換し、この電気信号を制御部21に出力することができる。これにより、制御部21はこの電気信号に基づいて温度を認識することができる。
このセンサ26は本体部2またはバンド部3に設けられており、ユーザの体温を検出することができる。なお、センサ26はユーザの皮膚に接触して、直接に体温を検出してもよい。あるいは、センサ26が本体部2またはバンド部3を介してユーザからの熱を受け取ってもよい。つまり、センサ26は間接的にユーザの体温を検出してもよい。
送受信処理部201は、センサ26によって検出された温度に基づく物理情報を、無線通信部22を介して別の装着型機器1へと送信する。また送受信処理部201は、温度に基づく物理情報を別の装着型機器1から無線通信部22を介して受信する。ここでいう温度に基づく物理情報とは、例えば温度自体を示す情報であってもよい。
刺激部23は例えば冷熱素子232を有していてもよい。冷熱素子232は制御部21によって制御される。冷熱素子232は可制御の熱を発生または吸収する。これにより、冷熱素子232は可制御の熱をユーザの装着部位(例えば腕)と交換することができる。つまり、冷熱素子232は制御部21の制御の下で、ユーザの装着部位を温めたり、或いは、ユーザの装着部位を冷やすことができる。換言すれば、冷熱素子232は、可制御の刺激量でユーザの皮膚の温度覚の受容器を刺激することができる。
冷熱素子232は例えばヒータまたはペルチェ素子である。ヒータは熱を発生させることができ、ペルチェ素子は熱を発生させたり、あるいは、熱を吸収することができる。例えばヒータは電熱線を有しており、刺激処理部202は、この電熱線に流す電流を制御することで、ヒータの発熱量を制御することができる。例えば電池27と電熱線との間にDC(Direct Current)/DCコンバータを接続し、刺激処理部202がこのDC/DCコンバータを制御することで、電熱線に流れる電流の大きさを制御してもよい。電熱線に流れる電流が大きいほど、発熱量は大きい。
ペルチェ素子は、例えば、第1から第3の金属板と、第1および第2の半導体とを備えている。第1の半導体は例えばP型の半導体であって、第1の金属板と第2の金属板との間に接続されている。第2の半導体は例えばN型の半導体であって、第2の金属板と第3の金属板との間に接続されている。このようなペルチェ素子において、第1の金属板から第3の金属板に向かって電流を流すと、ペルチェ効果により、第1の金属板が熱を放出し、第2の金属板が熱を吸収する。反対方向に電流を流すと、ペルチェ効果により、第2の金属板が熱を放出し、第3の金属板が熱を吸収する。
例えば、このペルチェ素子は、第2の金属板をユーザの腕側(つまり装着型機器1の内周側)に向けつつ、第1および第3の金属板をユーザの腕とは反対側(つまり外周側)に向けて、配置されてもよい。刺激処理部202は、第1の金属板と第3の金属板との間の直流電圧の向きを制御することで、第2の金属板側において熱を発生させたり、あるいは、熱を吸収したりできる。言い換えれば、ペルチェ素子は、ユーザの腕に熱を与えたり、あるいは、ユーザの腕から熱を吸収することができる。
例えば電池27の高電位出力端および低電位出力端と、第1および第3の金属板との接続関係を切り替えるスイッチを設け、刺激処理部202が当該スイッチを制御することで、直流電圧の向きを制御してもよい。また、刺激処理部202は当該直流電圧の大きさを制御することでその熱量を制御できる。例えば電池27とペルチェ素子との間に、DC/DCコンバータを接続し、刺激処理部202がこのDC/DCコンバータを制御することで、当該直流電圧を制御してもよい。
刺激処理部202は、別の装着型機器1から受信した物理情報に基づいて、その温度の変化を再現すべく、冷熱素子232を制御する。
例えば装着型機器1Aのセンサ26AはユーザUAの体温を繰り返し検出する。送受信処理部201Aは、例えば、この温度の変化を示す情報を、温度に基づく物理情報として装着型機器1Bへと送信する。この温度の変化とは、例えばユーザの平温からの変化であってもよい。例えば、この平温はセンサ26Aによって検出されてもよい。より具体的には、例えば入力部24Aは、平温を検出するための入力を受け付けてもよい。制御部21Aは、この入力に応答して、センサ26Aによって検出された温度を、平温として記憶媒体213に記憶する。そして、制御部21Aは、平温を検出したタイミングとは別のタイミングで検出された温度と、平温との温度差を算出し、その温度差を示す情報を、温度の変化を示す情報として送信してもよい。
装着型機器1Bの送受信処理部201Bは温度に基づく物理情報を受信する。そして、刺激処理部202Bは、この温度の変化をユーザの皮膚の感覚器で再現すべく、物理情報に基づいて冷熱素子232を制御する。例えば、温度が上昇しているときには、その上昇量に対応する熱を、冷熱素子232Bに発生させる。
刺激処理部202Bは例えばフィードフォワード制御を行ってもよい。例えば、温度差と電流との関係を予め記憶媒体213に記憶しておく。刺激処理部202Bは、装着型機器1Aから受信した物理情報に基づいて、ユーザUAの温度差を把握し、この温度差と上記関係とに基づいて決定される電流を、ヒータまたはペルチェ素子に流してもよい。あるいは、刺激処理部202Bは例えばフィードバック制御を行ってもよい。例えば装着型機器1Bの記憶媒体213に、ユーザUBの平温を記憶しておく。このユーザUBの平温はユーザUAの平温と同様の手法によって、記憶媒体213に記憶されてもよい。刺激処理部202Bは、センサ26Bによって検出される温度と、ユーザUBの平温との温度差を算出し、次に、ユーザUBの温度差と、ユーザUAの温度差との偏差を算出する。そして、刺激処理部202Bは、この偏差が零に近づくように、当該偏差に基づいてヒータまたはペルチェ素子の熱量を制御してもよい。これによれば、より高い精度で、ユーザUAの体温上昇量でユーザUBの腕を温めることができる。
以上のように、ユーザUAの体温上昇に伴って、ユーザUBの腕が温められるので、ユーザUBはユーザUAの体温上昇を擬似的に体感することができる。
冷熱素子232Bがペルチェ素子である場合には、ユーザから熱を吸収することができる。よって、装着型機器1Bは例えばユーザUAの体温の低下も再現できる。この温度の低下に基づく物理情報は、装着型機器1Aから装着型機器1Bへと送信される。刺激処理部202Bは、この物理情報に基づいて、その低下量に対応する熱を冷熱素子232Bに吸収させる。具体的な制御の一例は上述と同様である。これにより、ユーザUAの体温低下に伴ってユーザUBの腕が冷やされる。よって、ユーザUBはユーザUAの体温低下を擬似的に体感することができる。
以上のように、ユーザUBはユーザUAの体温の変化を体感できる。よって、ユーザUBはユーザUAの体温の変化に応じた処理を行うことができる。例えば、ユーザUAが子供であり、ユーザUBが親である場合に、親が子供を迎えに行って、適切な処理を施すことができる。
しかも、装着型機器1によれば、ユーザUBは、ユーザUAの体温の変化の情報を例えば数字で知るのではなく、実際の体温の変化を擬似的に体感することができる。したがって、ユーザUBはユーザUAの状態を共感しやすい。よって、体温の変化が急激に生じた場合には、ユーザUBはその緊急性を実感しやすい。
図13および図14は、それぞれ装着型機器1A,1Bの動作の一例を示すフローチャートである。図13および図14の一連の動作は、例えば所定時間ごとに繰り返し実行されてもよい。図13を参照して、ステップS21にて、センサ26Aは温度を検出し、その検出結果を制御部21Aへと出力する。次にステップS22にて、送受信処理部201Aは、センサ26Aによって検出された温度と、記憶媒体213に記憶された平温との温度差が温度差基準値よりも大きいか否かを判断する。この温度差基準値は予め決められて記憶媒体213に記憶されてもよく、例えば零に近い正の値であってよい。当該温度差が温度差基準値よりも大きいと判断したときには、ステップS23にて、送受信処理部201Aは、温度に基づく物理情報(例えば当該温度差を示す情報)を、無線通信部22Aを介して、装着型機器1Bへと送信する。一方で、ステップS22において当該温度差が温度差基準値よりも小さいと判断したときには、制御部21Aは処理を終了する。
なお制御部21はステップS22を実行せずにステップS23を実行してもよい。ただし、ステップS22によれば、ノイズなどによって温度が増大または低減しても、その温度に基づく物理情報は送信されない。したがって、不要な送信を抑制することができる。
図14を参照して、ステップS31にて、送受信処理部201Bは、温度に基づく物理情報を、無線通信部22Bを介して受信したか否かを判断する。物理情報を受信していないと判断したときには、送受信処理部201Bは再びステップS31を実行する。物理情報を受信したと判断したときには、ステップS32にて、刺激処理部202Bは温度の変化を再現すべく、上述のように、当該物理情報に基づいて冷熱素子232を制御する。
<温度の再現>
上述の例では、装着型機器1Bが、装着型機器1Aのセンサ26Aによって検出された温度と平温との温度差を再現した。しかるに、装着型機器1Bは、センサ26Aによって検出された温度自体を再現してもよい。即ち、刺激処理部202Bは、センサ26Aによって検出された温度を再現すべく、冷熱素子232BにユーザUBの装着部位と熱を交換させてもよい。例えば、刺激処理部202Bは、センサ26Bによって検出される温度が、装着型機器1Aのセンサ26Aによって検出された温度とほぼ一致するように、冷熱素子232Bを制御してもよい。これによれば、ユーザUBはユーザUAの体温を擬似的に体感することができる。
上述の例では、装着型機器1Bが、装着型機器1Aのセンサ26Aによって検出された温度と平温との温度差を再現した。しかるに、装着型機器1Bは、センサ26Aによって検出された温度自体を再現してもよい。即ち、刺激処理部202Bは、センサ26Aによって検出された温度を再現すべく、冷熱素子232BにユーザUBの装着部位と熱を交換させてもよい。例えば、刺激処理部202Bは、センサ26Bによって検出される温度が、装着型機器1Aのセンサ26Aによって検出された温度とほぼ一致するように、冷熱素子232Bを制御してもよい。これによれば、ユーザUBはユーザUAの体温を擬似的に体感することができる。
<温度分布の再現>
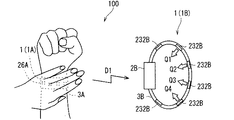
図15は、装着型機器1の構成の一例を概略的に示す図である。図15に例示するように、冷熱素子232は複数設けられてもよい。これら複数の冷熱素子232は例えばバンド部3の周方向に沿って並んで設けられていてもよい。例えばバンド部3にフレキシブルプリント基板を設け、この基板上に、複数の冷熱素子232(例えば電熱線またはペルチェ素子)を設けてもよい。制御部21は複数の冷熱素子232と個別に接続されており、冷熱素子232の熱量を個別に制御することができる。
図15は、装着型機器1の構成の一例を概略的に示す図である。図15に例示するように、冷熱素子232は複数設けられてもよい。これら複数の冷熱素子232は例えばバンド部3の周方向に沿って並んで設けられていてもよい。例えばバンド部3にフレキシブルプリント基板を設け、この基板上に、複数の冷熱素子232(例えば電熱線またはペルチェ素子)を設けてもよい。制御部21は複数の冷熱素子232と個別に接続されており、冷熱素子232の熱量を個別に制御することができる。
またセンサ26も複数設けられてもよい。これらのセンサ26もバンド部3の周方向に沿って並んで設けられてもよい。またセンサ26は上述の基板上に設けられてもよい。複数のセンサ26は、互いに異なる複数の位置において温度を検出する。言い換えれば、センサ26は、物理量として、複数の位置における温度を検出する。
センサ26の個数と冷熱素子232の個数とは互いに等しくてもよい。またこの場合、センサ26の各々の周方向における位置が、冷熱素子232の各々の周方向における位置と同じであってもよい。より具体的には、センサ26の一部の周方向の位置が、冷熱素子232の一部の周方向の位置と同じであってもよい。
送受信処理部201Aは、複数のセンサ26Aによって検出された温度に基づく物理情報を装着型機器1Bへと送信してもよい。装着型機器1Bの送受信処理部201Bはこの物理情報を受信する。そして、刺激処理部202Bは、装着型機器1Aの温度分布をユーザUBの皮膚の感覚器で再現すべく、物理情報に基づいて複数の冷熱素子232を制御してもよい。
例えば、刺激処理部202Bは、各センサ26Bによって検出される温度が、対応するセンサ26Aによって検出された温度に近づくように、冷熱素子232Bの熱量を個別に制御する。これによれば、装着型機器1Aの温度分布が、装着型機器1Bにおいて再現される。
図16は、装着型機器システム100の構成の一例を示す図である。例えば図16に示すように、ユーザUAは、装着型機器1Aを装着していない方の手のひらでバンド部3の一部を覆って、このバンド部3の一部を温める。これにより、バンド部3のうち手に覆われた部分に設けられた複数のセンサ26Aの検出温度が上昇する。図16に例示する装着型機器1においては、4つのセンサ26Aが手のひらで覆われることになるので、この4つのセンサ26Aによって検出される温度が上昇する。なお、ここでは一例として、6個のセンサ26Aが周方向に沿って並んで設けられており、そのうち、両端のセンサ26Aを除く4つのセンサ26Aが手のひらで覆われていると仮定する。
装着型機器1Aの送受信処理部201Aは、全てのセンサ26Aによって検出される温度に基づく物理情報D1を、装着型機器1Bへと送信する。物理情報D1には、例えば全てのセンサ26Aによる検出温度が含まれている。装着型機器1Bの送受信処理部201Bは物理情報D1を受信し、刺激処理部202Bがこの物理情報D1に基づいて複数の冷熱素子232を個別に制御する。図16の例示では、冷熱素子232は、センサ26と同じく6個設けられている。刺激処理部202Bは物理情報D1に基づいて、センサ26Aに対応する位置に設けられた冷熱素子232Bを個別に制御する。
具体的な一例として、刺激処理部202Bは、例えば各センサ26Bによって検出される温度が、対応するセンサ26Aによって検出された温度に近づくように、対応する冷熱素子232Bを制御してもよい。つまり、刺激処理部202Bは、一つの冷熱素子232Bを、一つのセンサ26Aによって検出された温度に基づいて制御してもよい。これによれば、簡単な制御方法によって冷熱素子232Bを制御できる。
刺激処理部202Bはフィードフォワード制御を行ってもよく、フィードバック制御を行ってもよい。例えば、刺激処理部202Bは、各センサ26Aによって検出された温度に応じた電流を、対応する冷熱素子232Bに流してもよい(フィードフォワード制御)。あるいは、刺激処理部202Bは、各センサ26Aによって検出された温度と、対応するセンサ26Bによって検出された温度との偏差を算出し、この偏差が零に近づくように、対応する冷熱素子232Bを当該偏差に基づいて制御してもよい(フィードバック制御)。
上述のように、ここでは、両端のセンサ26Aを除く4つのセンサ26Aの検出温度が上昇するので、主として、両端の冷熱素子232Bを除く4つの冷熱素子232Bがそれぞれ熱量Q1〜Q4を発生することになる。
以上のように本装着型機器1によれば、例えばユーザUAがバンド部3Aの一部を手のひらで覆って温めると、ユーザUBのバンド部3Bの対応する一部(バンド部3Aの一部に対応する一部)が温められる。よって、ユーザUBはユーザUAと同じ部分において温めを体感することができる。したがって、例えばユーザUAが親であり、ユーザUBが子供である場合には、親が擬似的に手のひらで子供の腕を温めることができる。また、逆に子供は自分の腕が親の手のひらによって温められているように、擬似的に体感することができる。これにより、親は子供を安心させることができる。
<力と温度の再現>
センサ26は感圧センサと温度センサを有していてもよい。装着型機器1Aの送受信処理部201Aはこれらのセンサによって検出された力および温度に基づく物理情報を、装着型機器1Bへと送信してもよい。そして、刺激処理部202Bは当該力と当該温度を再現すべく、受信した物理量に基づいて刺激部23を制御してもよい。これによれば、例えばユーザUAが装着型機器1Aを握りしめることによって、ユーザUBは、ユーザUAによる握りしめによる力のみならず、握りしめによる温度上昇も体感することができる。よって、例えばユーザUAが親であり、ユーザUBが子供である場合に、子供をより安心させることができる。
センサ26は感圧センサと温度センサを有していてもよい。装着型機器1Aの送受信処理部201Aはこれらのセンサによって検出された力および温度に基づく物理情報を、装着型機器1Bへと送信してもよい。そして、刺激処理部202Bは当該力と当該温度を再現すべく、受信した物理量に基づいて刺激部23を制御してもよい。これによれば、例えばユーザUAが装着型機器1Aを握りしめることによって、ユーザUBは、ユーザUAによる握りしめによる力のみならず、握りしめによる温度上昇も体感することができる。よって、例えばユーザUAが親であり、ユーザUBが子供である場合に、子供をより安心させることができる。
<物理量>
上述の複数の例では、物理量は、力または温度などの、皮膚の感覚器によって知覚可能な物理量であり、装着型機器1は、その物理量を知覚可能な感覚器と同じ感覚器を、受信した物理情報に基づいて刺激している。よって、ユーザは同じ種類の感覚器で、物理量を体感できる。これにより、ユーザは他のユーザの状態をより実際的に体感できる。
上述の複数の例では、物理量は、力または温度などの、皮膚の感覚器によって知覚可能な物理量であり、装着型機器1は、その物理量を知覚可能な感覚器と同じ感覚器を、受信した物理情報に基づいて刺激している。よって、ユーザは同じ種類の感覚器で、物理量を体感できる。これにより、ユーザは他のユーザの状態をより実際的に体感できる。
<生体情報>
図17は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。図18は、装着型機器システムの構成の一例を概略的に示す図である。図17の装着型機器1は、刺激部23およびセンサ26という点で、図3の装着型機器1と相違する。
図17は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。図18は、装着型機器システムの構成の一例を概略的に示す図である。図17の装着型機器1は、刺激部23およびセンサ26という点で、図3の装着型機器1と相違する。
センサ26は例えば周期的に変動する生体情報を検出する生体センサであってもよい。例えばセンサ26は心拍センサである。心拍センサはユーザの心拍のリズムを検出することができる。例えば心拍センサは光源と受光素子とを有しており、その光源がユーザの皮膚に向けて光を照射し、受光素子がその反射光を受光する。反射光は血流の変化によって変化するので、心拍センサは当該反射光の変化に基づいて、心拍のリズムを検出することができる。この心拍のリズムは、例えば、血管の単位面積を通る、微小時間当たりの血流量(あるいは血圧)の時系列データによって表すことができる。
センサ26は、例えば手首の動脈に対応する位置に設けられてもよい。手首の動脈を用いれば、心拍のリズムを検知しやすいからである。図18の例示では、センサ26AがユーザUAの手首の動脈に対応する位置において、バンド部3に設けられている。
送受信処理部201は、この心拍のリズムに基づく物理情報D1を別の装着型機器1へと送信する。例えば、心拍のリズムに基づく物理情報D1として、血流量の時系列データを採用することができる。つまり、制御部21は、センサ26の検出結果に基づいて、血流量の時系列データを示す物理情報D1を生成し、これを別の装着型機器1へと送信する。また逆に、送受信処理部201は、別の装着型機器1から、心拍のリズムに基づく物理情報D1を受信する。
刺激部23は例えば振動部233を含んでいてもよい。この振動部233は制御部21によって制御されて、振動する。この振動は例えば本体部2またはバンド部3を介してユーザに伝達される。振動部233は例えば偏心モータを含んでいてもよい。制御部21はこの偏心モータを回転させることで、振動を発生させることができる。このような振動部233は、例えば、ユーザの皮膚の圧覚の受容器を刺激することができる。
刺激処理部202は、例えば心拍のリズムをユーザの皮膚の感覚器で再現すべく、上記物理情報に基づいて、振動部233を振動させる。例えば刺激処理部202は、上記物理情報に基づいて、血流量の変化の周期を検出する。例えば刺激処理部202は、血流量がピーク値またはボトム値をとるタイミングに基づいて、周期を検出してもよい。そして、刺激処理部202はその周期で振動部233を振動させる。例えば刺激処理部202は上記タイミングで振動部233を短時間(上記周期よりも短い期間)に亘って振動させる。これによれば、振動部233は心拍のリズムで振動することができる。図18の例示では、装着型機器1Bが振動することを、4つの波線で模式的に示している。
振動部233Bが心拍のリズムで振動するので、ユーザUBはユーザUAの心拍のリズムを擬似的に体感することができる。したがって、ユーザUBは、例えば単に心拍数が数字で通知される場合と比べて、ユーザUAの心拍の上昇時にその緊急性を実感しやすい。
あるいは、ユーザUAが親であり、ユーザUBが子供である場合には、子供が親の心拍のリズムを擬似的に体感することができる。例えば子供が一人で留守番をしている場合に、親の心拍を体感できれば、子供を安心させることができる。
図19および図20は、それぞれ装着型機器1A,1Bの動作の一例を示すフローチャートである。図19および図20の一連の動作は、例えば所定時間ごとに繰り返し実行されてもよい。図19を参照して、ステップS41にて、センサ26Aは心拍数を検出し、その検出結果を制御部21Aへと出力する。次にステップS42にて、送受信処理部201Aは、この心拍数が所定の範囲外であるか否かを判断する。所定の範囲は、予め決められて記憶媒体213に記憶されてもよい。当該心拍数が所定の範囲外であると判断したときには、ステップS43にて、送受信処理部201Aは、心拍に基づく物理情報(例えば血流量の時系列データ)を、無線通信部22Aを介して、装着型機器1Bへと送信する。一方で、ステップS42において当該心拍数が所定の範囲内であると判断したときには、制御部21Aは処理を終了する。
制御部21はステップS42を実行することなく、ステップS43を実行してもよい。ただし、ステップS42によれば、センサ26Aによって検出される心拍数が所定の範囲内であるときには、物理情報を送信しない。よって、ノイズなどによって心拍数が増大または低減しても、その心拍に基づく物理情報は送信されない。したがって、不要な送信を抑制することができる。
図20を参照して、ステップS51にて、送受信処理部201Bは、心拍に基づく物理情報を、無線通信部22Bを介して受信したか否かを判断する。物理情報を受信していないと判断したときには、送受信処理部201Bは再びステップS51を実行する。物理情報を受信したと判断したときには、ステップS52にて、刺激処理部202Bは、心拍のリズムをユーザUBの皮膚の感覚器で再現すべく、当該物理情報に基づいて、上述のように、振動部233を振動させる。
なお刺激処理部202は心拍のリズムを、必ずしも振動で再現する必要はなく、例えばユーザの腕の締め付けで再現してもよい。例えば刺激処理部202は、バンド部3を用いて、上記タイミングでユーザの腕を短時間に亘って締め付けても構わない。
また物理情報は血流量の時系列データに限らない。例えば、送受信処理部201は、心拍のリズムに基づく物理情報として、例えば血流量がピーク値をとるタイミング、あるいは、血流量の周期を示す情報を送信してもよい。そして、当該情報を受け取った装着型機器1において、刺激処理部202が刺激部23に、当該周期でユーザの皮膚を刺激させてもよい。要するに、送受信処理部201は、心拍のリズムで刺激部23にユーザの皮膚の感覚器を刺激させるために必要な情報を、送信すればよい。
<物理量に基づく物理情報の送信トリガ>
入力部24Aは物理情報の送信指示の入力を受け付けてもよい。つまり、送受信処理部201Aはこの入力を物理情報の送信条件の一つとして用いてもよい。これによれば、ユーザUAが物理情報を送信するか否かを決定することができる。
入力部24Aは物理情報の送信指示の入力を受け付けてもよい。つまり、送受信処理部201Aはこの入力を物理情報の送信条件の一つとして用いてもよい。これによれば、ユーザUAが物理情報を送信するか否かを決定することができる。
或いは、送受信処理部201Aは、装着型機器1Bからの送信要求の受信を、物理情報の送信条件の一つとして用いてもよい。例えば、ユーザUBが、装着型機器1Bの入力部24Bへと物理情報の要求指示を入力すると、送受信処理部201Bは物理情報の要求信号を装着型機器1Aへと送信する。装着型機器1Aの送受信処理部201Aは、この要求信号の受信を物理情報の送信条件の一つとして、物理情報を装着型機器1Aへと送信してもよい。これによれば、例えばユーザUBがユーザUAの心拍を体感したい場合に、入力部24Bへ要求指示を入力することにより、その心拍を体感できる。
<加速度>
上述の例では、装着型機器1は、周期的に変化する生体情報を、ユーザの皮膚の感覚器で再現した。しかるに、再現の対象は生体情報に限らない。要するに、装着型機器1は周期的に変化する物理量を再現すればよい。例えば、ユーザが装着型機器1を周期的に移動させる場合には、この装着型機器1の空間的な動きのリズムを、皮膚の感覚器で再現してもよい。以下に詳述する。
上述の例では、装着型機器1は、周期的に変化する生体情報を、ユーザの皮膚の感覚器で再現した。しかるに、再現の対象は生体情報に限らない。要するに、装着型機器1は周期的に変化する物理量を再現すればよい。例えば、ユーザが装着型機器1を周期的に移動させる場合には、この装着型機器1の空間的な動きのリズムを、皮膚の感覚器で再現してもよい。以下に詳述する。
図21は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。図22は、装着型機器システム100の構成の一例を示す図である。図21の装着型機器1は、センサ26という点で、図17の装着型機器1と相違する。
センサ26は、例えば装着型機器1の加速度を検出する加速度センサであってもよい。例えばユーザが腕を動かすことによって、装着型機器1が空間的に移動する。このとき、装着型機器1は加速を伴って移動する。センサ26は、この加速度を検出し、検出した加速度の値を電気信号に変換して制御部21に出力することが可能である。例えばセンサ26は静電容量方式、ピエゾ抵抗方式または熱検知方式などの方式に基づいて、加速度を検出することができる。このセンサ26は、例えば、互いに略直交するXYZ軸の加速度成分を検出する。
制御部21は、センサ26から入力された電気信号に基づいて、加速度の値を認識することができる。この加速度の時間積分は装着型機器1の移動速度を示し、移動速度の時間積分は装着型機器1の位置(あるいは移動量)を示す。よって、制御部21は加速度に基づいて、装着型機器1の空間的な動きを認識することができる。
例えば図22に示すように、ユーザUAが腕を周期的に例えば鉛直上下に動かすと、装着型機器1Aが往復移動させられることになる。このような動きは、例えばユーザが楽器を演奏するときに行われる。例えばユーザがギターまたはベースを演奏する場合、ユーザは絃をはじくために腕を上下に往復させる。またユーザが例えばドラムを演奏する場合にも、ユーザはドラムを叩くために腕を上下に往復させる。
送受信処理部201は、加速度に基づく物理情報を、別の装着型機器1へと送信する。動きに基づく物理情報として、加速度の時系列データを採用することができる。また逆に、送受信処理部201は、別の装着型機器1から、別の装着型機器1の加速度に基づく物理情報を受信する。
刺激処理部202は、例えば装着型機器1の動きのリズムをユーザの皮膚の感覚器で再現すべく、上記物理情報に基づいて、振動部233を振動させる。例えば、刺激処理部202は上記物理情報に基づいて、別の装着型機器1の動きの周期を検出する。例えば、刺激処理部202は、加速度がピーク値またはボトム値をとるタイミングに基づいて、周期を検出してもよい。
そして、刺激処理部202はその周期で振動部233を振動させる。例えば、刺激処理部202は上記タイミングで振動部233を短時間に亘って振動させる。これによれば、振動部233は、別の装着型機器1の動きのリズムで振動することができる。図22では、装着型機器1Bが振動することを、4つの波線で模式的に示している。
振動部233BがユーザUAの腕の動きのリズムで振動することによって、ユーザUBはユーザUAの腕の動きのリズムを体感することができる。例えば、ユーザUAがギターを弾いているときには、ユーザUBはその腕の動きを体感することができる。よって、ユーザUBはこの体感に基づいて、ギターを練習することができる。
例えばユーザUBによるギターの練習のためには、絃をはじくタイミングで振動部233が振動してもよい。絃をはじくタイミングをユーザUBが理解しやすいからである。ユーザUAが絃をはじくときには、加速度は小さくなっていると考えることができるので、装着型機器1Bの刺激処理部202Bは、装着型機器1Aの加速度がボトム値をとるタイミングで、振動部233を振動させてもよい。
また、装着型機器1Aの送受信処理部201Aは、ユーザによって装着型機器1Aが往復移動させられているときのみ、加速度に基づく物理情報を送信してもよい。装着型機器1Aが往復移動させられているか否かは、例えば、センサ26Aによって検出された加速度の時系列データに基づいて判断できる。例えば送受信処理部201Aは、加速度が所定の期間にわたってピーク値とボトム値との間を周期的に変化しているときに、装着型機器1Aが往復移動させられている、と判断できる。これによれば、不要な物理情報の送信を抑制することができる。
図23および図24は、それぞれ装着型機器1A,1Bの動作の一例を示すフローチャートである。図23および図24の一連の動作は、例えば所定時間ごとに繰り返し実行されてもよい。図23を参照して、ステップS61にて、センサ26Aは加速度を検出し、その検出結果を制御部21Aへと出力する。次にステップS62にて、送受信処理部201Aは、センサ26Aによって検出された加速度の時系列データに基づいて、装着型機器1Aが往復移動させられているか否かを判断する。肯定的な判断がなされたときには、ステップS63にて、送受信処理部201Aは、加速度に基づく物理情報(例えば加速度の時系列データ)を、無線通信部22Aを介して、装着型機器1Bへと送信する。一方で、ステップS62において否定的な判断がなされたときには、制御部21Aは処理を終了する。なお制御部21はステップS62を実行せずにステップS63を実行してもよい。
図24を参照して、ステップS71にて、送受信処理部201Bは、加速度に基づく物理情報を、無線通信部22Bを介して受信したか否かを判断する。物理情報を受信していないと判断したときには、送受信処理部201Bは再びステップS71を実行する。物理情報を受信したと判断したときには、ステップS72にて、刺激処理部202Bは、装着型機器1Aの動きのリズムを再現すべく、当該物理情報に基づいて、上述のように、例えば振動部233を振動させる。
なお物理情報は加速度の時系列データに限らない。例えば、送受信処理部201は、物理情報として、例えば加速度がピーク値をとるタイミング、あるいは、加速度の周期を示す情報を送信してもよい。そして、当該情報を受け取った装着型機器1において、刺激処理部202が刺激部23に、当該周期でユーザの皮膚を刺激させてもよい。要するに、送受信処理部201Aは、装着型機器1の動きのリズムで刺激部23にユーザの皮膚の感覚器を刺激させるために必要な情報を、送信すればよい。
<ギターの音の強弱>
刺激部23は例えばバンド部3と締付機構231とを備えていてもよい。この刺激部23は、可変の締め付け力で、ユーザの腕を締め付けることができる。そこで、ここでは、ユーザによるギターの絃をはじく強弱を、この締め付け力で再現すること企図する。
刺激部23は例えばバンド部3と締付機構231とを備えていてもよい。この刺激部23は、可変の締め付け力で、ユーザの腕を締め付けることができる。そこで、ここでは、ユーザによるギターの絃をはじく強弱を、この締め付け力で再現すること企図する。
センサ26は、加速度センサのみならず、例えば感圧センサを有している。ユーザの腕には、絃をはじいたときの力が伝わり、この力が感圧センサで検出される。例えばユーザがギターの絃を強くはじくと、感圧センサは、より大きい力を検出する。そこで、装着型機器1Aの送受信処理部201Aは、センサ26Aによって検出される加速度および力を互いに対応付けた物理情報を、装着型機器1Bへと送信してもよい。
装着型機器1Bにおいては、刺激処理部202Bは、上述のように、加速度センサによって検出された加速度に基づいて、装着型機器1Aの動きのリズムを再現するとともに、感圧センサによって検出された力に基づいて、強弱を再現する。図25は、センサに対応した再現方法を説明するための図である。刺激処理部202Bは、加速度の時系列データに基づいた装着型機器1Aの動きの周期、かつ、力に基づいた締め付け力で、締付機構231に締め付けさせる。
またギターの強弱を、音の大きさによって判別してもよい。具体的には、センサ26は感圧センサに替えて、音センサを備えていてもよい。音センサは例えばマイクである。音センサは、外部から入力された音を音信号に変換して制御部21に出力する。制御部21はこの音信号に基づいて、その音の大きさを求めることができる。ユーザがギターの絃を強くはじくと、音センサはより大きい音を検出する。
なお、センサ26は加速度センサを有さずに、感圧センサのみを有してもよい。なぜなら、この感圧センサは絃をはじくタイミングで力を検出するので、感圧センサの検出に基づいて、絃をはじくタイミングを把握できるからである。例えば送受信処理部201Aは、センサ26によって検出される力の時系列データを物理情報として送信する。刺激処理部202Bは力の時系列データに基づいて、力がピーク値をとるタイミングにおいて、そのピーク値に応じた締め付け力で、締付機構231にユーザの腕を締め付けさせてもよい。
<装着型機器1の周期的な移動の例>
<振動>
例えばユーザUAの腕が、寒さ、或いは、体調不良などによって震えると、これに起因して、装着型機器1Aが周期的に移動(あるいは振動)させられる。このような場合でも、装着型機器1Aは加速度に基づく物理情報を装着型機器1Bへと送信する。そして、装着型機器1Bの刺激処理部202Bは、装着型機器1Aの動きのリズムを再現すべく、振動部233Bを振動させる。例えば装着型機器1Bの刺激処理部202Bは、加速度の周期ごとに、振動部233Bを短時間に亘って振動させてもよい。よって、ユーザUBはユーザUAの震えを体感することができる。したがって、ユーザUBは適切な対応を行うことができる。例えばユーザUBは、ユーザUAに連絡をとったり、あるいは、ユーザUAを迎えに行くことができる。
<振動>
例えばユーザUAの腕が、寒さ、或いは、体調不良などによって震えると、これに起因して、装着型機器1Aが周期的に移動(あるいは振動)させられる。このような場合でも、装着型機器1Aは加速度に基づく物理情報を装着型機器1Bへと送信する。そして、装着型機器1Bの刺激処理部202Bは、装着型機器1Aの動きのリズムを再現すべく、振動部233Bを振動させる。例えば装着型機器1Bの刺激処理部202Bは、加速度の周期ごとに、振動部233Bを短時間に亘って振動させてもよい。よって、ユーザUBはユーザUAの震えを体感することができる。したがって、ユーザUBは適切な対応を行うことができる。例えばユーザUBは、ユーザUAに連絡をとったり、あるいは、ユーザUAを迎えに行くことができる。
<ランニング>
図26は、装着型機器システム100の構成の一例を示す図である。図26に示すように、例えばユーザUAがランニングを行っているときにも、装着型機器1Aは周期的に移動させられる。ユーザUAは腕を振りながらランニングを行うからである。
図26は、装着型機器システム100の構成の一例を示す図である。図26に示すように、例えばユーザUAがランニングを行っているときにも、装着型機器1Aは周期的に移動させられる。ユーザUAは腕を振りながらランニングを行うからである。
このような場合でも、装着型機器1Aは加速度に基づく物理情報を装着型機器1Bへと送信する。そして、装着型機器1Bの刺激処理部202Bは、装着型機器1Aの動きのリズムを再現すべく、振動部233Bを振動させる。例えば装着型機器1Bの刺激処理部202Bは、加速度の周期ごとに振動部233Bを短時間に亘って振動させてもよい。これによって、ユーザUBはユーザUAの腕の振りのリズムを体感することができる。したがって、ユーザUBはユーザUAのランニングのペースを推測することができ、仮想的にユーザUAと競争することができる。
<システム>
図27は、装着型機器システム100の構成の一例を示す図である。図27の例示では、装着型機器1は外部装置5と通信することが可能である。外部装置5は、例えば、通信部51と、制御部52と、記憶媒体53とを備えている。通信部51は、直接に、あるいは、他の装置を介して、装着型機器1と信号を送受信することができる。
図27は、装着型機器システム100の構成の一例を示す図である。図27の例示では、装着型機器1は外部装置5と通信することが可能である。外部装置5は、例えば、通信部51と、制御部52と、記憶媒体53とを備えている。通信部51は、直接に、あるいは、他の装置を介して、装着型機器1と信号を送受信することができる。
記憶媒体53には、物理量に基づく物理情報が記憶される。例えば、装着型機器1の送受信処理部201は、センサ26によって検出された物理量に基づく物理情報を、外部装置5へと送信する。制御部52は通信部51を介してこの物理情報を受信し、これを記憶媒体53に記憶する。つまり、記憶媒体53には、過去に装着型機器1が生成した物理情報がログ情報として記憶されることになる。
次に、この記憶媒体53に記憶された物理情報に基づいて、過去に装着型機器1が検出した物理量を再現する技術について説明する。
送受信処理部201は、物理情報を要求する要求信号を、無線通信部22を介して外部装置5へと送信することができる。例えば、入力部24は、この要求信号を送信するトリガとなる入力を受け付けてもよい。この場合、送受信処理部201は、ユーザからの入力に応答して、要求信号を送信する。
制御部52はこの要求信号を受信したときに、記憶媒体53に記憶された物理情報を読み出し、これを装着型機器1へと送信する。
送受信処理部201は当該物理情報を受信し、刺激処理部202が、その物理量をユーザの感覚器で再現すべく、刺激部23を制御する。これによれば、外部装置5に格納された物理量に基づく物理情報を用いて、その物理量を再現することができる。よって、物理量が検出されたタイミングとは別のタイミングで、その物理量を再現することができる。
例えば装着型機器1Aは、ユーザUAによるランニング中に検出された加速度に基づく物理情報を、外部装置5に送信し、制御部52がこれを記憶媒体53に格納してもよい。当該物理情報としては、例えば、ランニング中に検出された加速度の時系列データを採用できる。
そして、例えばユーザUAが別の日にランニングを開始するときに、ユーザUAは、要求信号を送信する指示を装着型機器1Aに入力する。これにより、装着型機器1Aは、以前に行ったランニングにおける腕の振りのリズムで、振動することになる。よって、ユーザUAは、以前に行ったランニングのペースを体感しながら、ランニングを行うことができる。
あるいは、装着型機器1Aは、ユーザUAによるギター演奏中に検出された加速度に基づく物理情報を、外部装置5に送信し、制御部52がこれを記憶媒体53に格納してもよい。当該物理情報としては、例えば、ギターの演奏中に検出された加速度の時系列データを採用できる。
そして、ユーザUBがギターの練習を行うときに、ユーザUBは、要求信号を送信するための指示を装着型機器1Bに入力する。これにより、装着型機器1Bは、ユーザUAのギターの演奏中の腕の振りのリズムで、振動することになる。よって、ユーザUBは、ユーザUAによる腕の振りのリズムを体感しながら、ギターを練習することができる。これによれば、ユーザUBは、ユーザUAの演奏中に練習する必要がなく、練習時間を任意に設定することができる。
<現在位置>
図28は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。図28の装着型機器1は、現在位置取得部28の有無という点で、図21の装着型機器1と相違する。
図28は、装着型機器1の電気的構成の一例を概略的に示す機能ブロック図である。図28の装着型機器1は、現在位置取得部28の有無という点で、図21の装着型機器1と相違する。
現在位置取得部28は、装着型機器1の現在位置を取得し、その位置情報を制御部21へと出力することができる。例えば現在位置取得部28は、位置情報受信機を備えている。この位置情報受信機は人工衛星からの信号を受信し、当該信号に基づいて現在位置を算出する。現在位置を示す位置情報には、緯度情報と経度情報とが含まれている。このような測位システムは、例えば、GPS(Global Positioning System)、GLONASS(Global Navigation Satellite System)、Galileo、Compass、IRNSS(Indian Regional Navigational Satellite System)、又はQZSS(Quasi-Zenith Satellite System)などのシステムである。
あるいは、無線通信部22が基地局と通信できる場合には、現在位置取得部28は、通信可能な基地局に基づいて、装着型機器1の現在位置を算出してもよい。各基地局には、通信可能な通信圏内が設定されている。無線通信部22がある基地局と通信できる場合には、その基地局の通信圏内に装着型機器1が位置していることが分かる。また無線通信部22が複数の基地局と通信可能であるときには、その複数の基地局の通信圏内が重複する領域に、装着型機器1が位置していることが分かる。そこで現在位置取得部は、無線通信部22と通信できる基地局を特定し、これらに基づいて現在位置を算出する。この場合、現在位置取得部28は制御部21の一機能として実装されても構わない。
制御部21は、センサ26によって検出される加速度に基づく情報と、現在位置取得部28によって取得される位置情報とを互いに対応付ける。例えばユーザがランニングしているときに、センサ26が加速度を繰り返し検出し、現在位置取得部28が位置情報を繰り返し取得する。制御部21は、例えば、ある加速度が検出されたタイミングに最も近いタイミングで取得される位置情報を、その加速度に対応付けてもよい。他の加速度についても同様である。
送受信処理部201は、加速度および位置情報に基づく物理情報を、外部装置5に送信しても構わない。この物理情報としては、例えば、加速度、位置、および、これらの対応関係を示す情報を採用できる。外部装置5の制御部52はこの物理情報を記憶媒体53に記憶する。
図29は、装着型機器1の上記動作の一例を示すフローチャートである。図29の例示では、ステップS81にて、制御部21は、ユーザによって入力部24に開始指示が入力されたか否かを判断する。この開始指示は、この加速度の検出および現在位置の取得を開始するトリガとして機能する。またユーザはこの開始指示の入力と前後して、ランニングを開始する。開始指示が入力されていないと判断したときには、制御部21はステップS81を再び実行する。
開始指示が入力されたと判断したときには、ステップS82にて、センサ26が加速度を検出し、次にステップS83にて、現在位置取得部28が現在位置を取得する。なおステップS82,S83の実行順序は互いに逆であってもよく、ステップS82,S83は並行して実行されてもよい。
次にステップS84にて、制御部21は、ユーザによって入力部24に終了指示が入力されたか否かを判断する。この終了指示は、加速度および位置に基づく物理情報を送信するトリガとして機能する。終了指示が入力されていないと判断したときには、制御部21は再びステップS82を実行する。終了指示が入力されたと判断したときには、ステップS85にて、制御部21は、加速度と現在位置とを互いに対応付けて物理情報を生成し、その物理情報を外部装置5へと送信する。
以上の動作の一例によって、外部装置5の記憶媒体53には、ユーザが過去にランニングを行ったときの物理情報がログ情報として記憶されることになる。図30は、位置および加速度の関係の一例を概略的に示す図である。ユーザはランニングにおいて、腕を振りながら移動するので、加速度は位置を変数として周期的に変化する。図30の例示では、模式的に、加速度は位置を変数とする正弦波で示されている。また図30では、加速度を連続的に示しているものの、物理情報においては、離散値であってもよい。
次に、この記憶媒体53に記憶された物理情報に基づいて、過去のランニングにおける腕の振りのリズムを再現する技術について説明する。
送受信処理部201は、外部装置5に記憶された加速度および位置に基づく物理情報を要求する要求信号を送信することができる。例えば、入力部24は、この要求信号を送信するトリガとなる入力を受け付けてもよい。この場合、送受信処理部201は、ユーザからの入力に応答して、要求信号を送信する。
制御部52はこの要求信号を受信したときに、記憶媒体53に記憶された物理情報を読出し、これを装着型機器1へと送信する。
送受信処理部201はこの物理情報を受信する。この物理情報には、位置(以下、過去位置と呼ぶ)および加速度が含まれている。刺激処理部202は、過去位置における装着型機器1の動きの周期を、物理情報に基づいて算出する。例えば、刺激処理部202は、図30も参照して、加速度がピーク値をとる第1タイミングから、次にピーク値をとる第2タイミングまでの期間を周期として算出してもよい。また、この周期は、その第1タイミングから第2タイミングまでに取得された複数の過去位置(例えば図30において過去位置P1〜P4)に対して共通の周期とされる。つまり、第1タイミングから第2タイミングまでの期間内に取得された複数の過去位置P1〜P4に共通して、一つの周期が算出される。刺激処理部202は、この処理を繰り返し行うことで、過去位置の全てに対応づけて周期を算出することができる。図30の例では、過去位置P1〜P4に対して一つの周期が算出され、過去位置P5〜P9に対して一つの周期が算出され、過去位置P10〜P12に対して一つの周期が算出される。
そして、刺激処理部202は、現在位置取得部28によって取得された位置情報によって示される現在位置と、過去位置との差が、位置基準値よりも小さいか否かを判断する。つまり、刺激処理部202は現在位置が過去位置とほぼ一致するか否かを判断する。この位置基準値は例えば予め設定されて、記憶媒体213に記憶されていてもよい。当該差が位置基準値よりも小さいと判断したときには、刺激処理部202は、その過去位置における装着型機器1の動きのリズムを再現すべく、その過去位置に対応する周期で刺激部23に、ユーザの皮膚の感覚器を刺激させる。例えば刺激処理部202は振動部233を、その過去位置に対応する周期で振動させる。
図31は、装着型機器1の上記動作の一例を示すフローチャートである。図31の例示では、ステップS91にて、制御部21は、ユーザによって入力部24に第2開始指示が入力されたか否かを判断する。この第2開始指示は、過去のランニングにおける装着型機器1の動き(ユーザの腕の振り)のリズムの再現を開始するトリガとして機能する。またユーザはこの第2開始指示の入力と前後して、ランニングを開始する。第2開始指示が入力されていないと判断したときには、制御部21はステップS91を再び実行する。
第2開始指示が入力されたと判断すると、ステップS92にて、送受信処理部201は加速度および位置に基づく物理情報を外部装置5に要求する。次にステップS92にて、送受信処理部201はこの物理情報を受信したか否かを判断する。送受信処理部201は、例えば予め決められた所定期間に亘って物理情報を受信しないときに、物理情報を受信しなかったと判断する。物理情報を受信しなかったと判断したときには、制御部21は例えば処理を終了する。
物理情報を受信したと判断したときには、ステップS94にて、制御部21は、物理情報に基づいて、過去位置における周期を算出する。次にステップS95にて、現在位置取得部28は現在位置を取得する。次にステップS96にて、刺激処理部202は、現在位置と略同じ位置(=現在位置との差が位置基準値よりも小さい位置)での、装着型機器1の過去の動きのリズムを再現すべく、刺激部23を制御する。例えば、刺激処理部202はその過去位置に対応した周期で振動部233を振動させる。次にステップS97にて、制御部21は、ユーザによって第2終了指示が入力部24に入力されたか否かを判断する。第2終了指示は、過去のランニングにおける装着型機器1の動きのリズムの再現を終了するトリガとして機能する。第2終了指示が入力されていないと判断すると、現在位置取得部28は再びステップS95を実行する。第2終了指示が入力されたと判断すると、制御部21は処理を終了する。
これによれば、ユーザUAは、その位置での過去のランニングにおける腕の振りのリズムを体感しながら、ランニングを行うことができる。したがって、ユーザUAは、その位置における過去のランニングのペースを推定することができ、過去の自分と仮想的に競争することができる。
<複数の物理情報>
例えばユーザが同じルートを所定の期間ごとに(例えば毎日)ランニングし、装着型機器1がその都度動作することにより、外部装置5の記憶媒体53には、そのランニングごとに、物理情報が記録される。
例えばユーザが同じルートを所定の期間ごとに(例えば毎日)ランニングし、装着型機器1がその都度動作することにより、外部装置5の記憶媒体53には、そのランニングごとに、物理情報が記録される。
この場合、装着型機器1は、これら複数の物理情報を外部装置5から受信してもよい。制御部21は、ある過去位置に対応した周期を、その物理情報ごとに算出する。そして、制御部21は、これら複数の周波数の統計値(例えば平均値、最大値、または最小値などの統計値)を、その過去位置に対応した周期として算出してもよい。制御部21は、この処理を全ての過去位置について行うことで、各過去位置に対応する周期を算出することができる。
なお、どの統計値(例えば平均値か、最大値か、最小値か)を採用するかは、予め設定されていてもよく、ユーザの入力に応じた統計値を採用してもよい。
<締付機構>
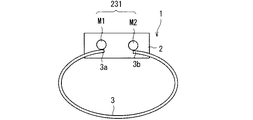
図32は、装着型機器1の構成の一例を概略的に示す図である。図32の装着型機器1の締付機構231は、図4の装着型機器1と比較して、2つのモータM1,M2を備えている。モータM1,M2は制御部21によって制御されて回転する。モータM1には、バンド部3の一端3aが固定され、モータM2には、モータM2には、他端3bが固定されている。モータM1,M2がそれぞれ回転することにより、モータM1,M2は、それぞれ一端3a側および他端3b側において、バンド部3の一部を巻き取ることができる。
図32は、装着型機器1の構成の一例を概略的に示す図である。図32の装着型機器1の締付機構231は、図4の装着型機器1と比較して、2つのモータM1,M2を備えている。モータM1,M2は制御部21によって制御されて回転する。モータM1には、バンド部3の一端3aが固定され、モータM2には、モータM2には、他端3bが固定されている。モータM1,M2がそれぞれ回転することにより、モータM1,M2は、それぞれ一端3a側および他端3b側において、バンド部3の一部を巻き取ることができる。
図33は、装着型機器1の構成の一例を概略的に示している。図33の例示では、2つのモータM1,M2には、バンド部3の一部がそれぞれ巻き付いている。つまり、バンド部3が2つのモータM1,M2によって巻き取られている。よって、バンド部3のうち本体部2から延びる部分の周の長さは、図32の装着型機器1のそれに比べて短い。つまり、2つのモータM1,M2が、それぞれ一端3a側および他端3b側において、バンド部3の一部を巻き取ることにより、バンド部3がユーザの腕を締め付けることができる。制御部21は、例えばこれらモータM1,M2の出力トルクを制御することで、締め付け力を制御することができる。
逆に、モータM1,M2が、締め付けとは反対方向に回転することにより、本体部2から延びるバンド部3の周の長さが長くなる。これにより、モータM1,M2はバンド部3による腕の締め付けを緩めることができる。
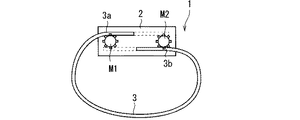
図34は、装着型機器1の構成の一例を概略的に示す図である。図34の例示では、締付機構231はモータM1,M2を有している。モータM1,M2は制御部21によって制御されて回転する。各モータM1,M2の外周には、周方向に沿って複数の凸部が立設されている。つまり、このモータM1,M2は、回転軸に沿って見て、歯車形状を有している。一方で、ベルト部3の一端3a側の内周面には、その長手方向に沿って複数の凹部が形成され、ベルト部3の他端3b側の外周面には、その長手方向に沿って複数の凹部が形成されている。ベルト部3の一端3a側の凹部はモータM1の凸部と嵌合し、ベルト部3の他端3b側の凹部はモータM2の凸部と嵌合する。
これらのモータM1,M2がそれぞれ回転することで、ベルトコンベアと同様の原理によって、ベルト部3の一端3aおよび他端3bを、それぞれ本体部2の内部へと移動させることができる。図35は、装着型機器1の構成の一例を概略的に示している。図35の装着型機器1においては、図34と比較して、ベルト部3の一端3aおよび他端3bが本体部2のより内部に位置している。よって、バンド部3のうち本体部2から延びる部分の周の長さは、図34の装着型機器1のそれに比べて短い。よって、バンド部3がユーザの腕を締め付けることができる。制御部21は、例えばこれらモータM1,M2の出力トルクを制御することで、締め付け力を制御することができる。
逆に、モータM1,M2が、締め付けとは反対方向に回転することにより、本体部2から延びるバンド部3の周の長さが長くなる。これにより、モータM1,M2はバンド部3による腕の締め付けを緩めることができる。
なお図34および図35で示される本体部2において、破線で囲まれた領域は、ベルト部3がその長手方向に挿入可能な空間を示している。
図36および図37は、装着型機器1の構成の一例を概略的に示す図である。図36および図37の例示では、締付機構231が本体部2の外部に設けられている。例えば締付機構231は、本体部2と向かい合って配置されている。言い換えれば、締付機構231は、装着型機器1が形成する輪の中心に対して、本体部2とは反対側に位置している。図36の締付機構231の具体的な構造は図32と同様であり、図37の締付機構231の具体的な構造は図34と同様であるので、繰り返しの説明を避ける。
以上のように、装着型機器1は詳細に説明されたが、上記した説明は、全ての局面において例示であって、この開示がそれに限定されるものではない。また、上述した各種変形例は、相互に矛盾しない限り組み合わせて適用可能である。そして、例示されていない無数の変形例が、この開示の範囲から外れることなく想定され得るものと解される。
1 装着型機器
3 バンド部
21 制御部
22 通信部
23 刺激部
26 センサ
231 締付機構
232 冷熱素子
233 振動部
28 現在位置取得部
Pg1 制御プログラム
3 バンド部
21 制御部
22 通信部
23 刺激部
26 センサ
231 締付機構
232 冷熱素子
233 振動部
28 現在位置取得部
Pg1 制御プログラム
Claims (19)
- 第1ユーザに装着される装着型機器であって、
物理量に基づく第1情報を受信する第1通信部と、
可制御の刺激量で第1ユーザの皮膚の感覚器を刺激する刺激部と、
前記第1情報に基づいて、前記物理量を前記感覚器で再現するように、前記刺激部に前記感覚器を刺激させる第1処理部と
を備える、装着型機器。 - 請求項1に記載の装着型機器であって、
前記物理量は、前記感覚器によって知覚可能な物理量である、装着型機器。 - 請求項2に記載の装着型機器であって、
前記物理量は力を含み、
前記刺激部は、
第1バンド部と、
前記第1バンド部を用いて、可制御の締め付け力で前記第1ユーザの体の一部を締め付ける第1締付機構と
を有し、
前記第1処理部は、前記力を前記締め付け力で再現すべく、前記第1情報に基づいて、前記第1締付機構に前記第1ユーザの体の前記一部を締め付けさせる、装着型機器。 - 請求項3に記載の装着型機器と、
第2装着型機器と
を備え、
前記第2装着型機器は、
前記第1通信部と通信可能な第2通信部と、
力を前記物理量として検出する第1センサと、
前記第1センサによって検出された力に基づく情報を前記第1情報として、前記第2通信部を介して、前記装着型機器へと送信する第2処理部と
を備える、装着型機器システム。 - 請求項4に記載の装着型機器システムであって、
前記装着型機器は、力を検出する第2センサを更に備え、
前記第1処理部は、前記第2センサによって検出された力に基づく第2情報を、前記第1通信部を介して前記第2装着型機器へと送信し、
前記第2装着型機器は、
第2バンド部と、
前記第2バンド部を用いて、可制御の締め付け力で第2ユーザを締め付ける第2締付機構と、
前記第2通信部を介して前記第2情報を受信し、前記第2センサによって検出された力を再現すべく、前記第2情報に基づいて、前記第2締付機構に前記第2バンド部を締め付けさせる第2処理部と
を更に備える、装着型機器システム。 - 請求項2または請求項3に記載の装着型機器であって、
前記物理量は温度を含み、
前記刺激部は、可制御の熱を発生または吸収する冷熱素子を有し、
前記第1処理部は、前記温度を再現すべく、前記第1情報に基づいて、前記冷熱素子を制御する、装着型機器。 - 請求項6に記載の装着型機器であって、
前記物理量は複数の位置における温度を含み、
前記冷熱素子は複数の冷熱素子を含み、
前記第1処理部は、前記温度の分布を再現すべく、前記複数の冷熱素子を制御する、装着型機器。 - 請求項6または請求項7に記載の装着型機器と、
第2装着型機器と
を備え、
前記第2装着型機器は、
温度を検出するセンサと、
前記温度に基づく情報を、前記第1情報として前記装着型機器へと送信する第2通信部と
を備える、装着型機器システム。 - 請求項1に記載の装着型機器であって、
前記物理量は周期的に変化し、
前記第1処理部は、前記第1情報に基づいて、前記物理量の周期で前記刺激部に前記感覚器を刺激させる、装着型機器。 - 請求項9に記載の装着型機器であって、
前記刺激部は、
バンド部と、
前記バンド部を用いて、可制御の締め付け力で前記第1ユーザの体の一部を締め付ける締付機構と
を有し、
前記第1処理部は、前記第1情報に基づいて、前記物理量の周期で前記締付機構に前記第1ユーザの体の前記一部を締め付けさせる、装着型機器。 - 請求項9または請求項10に記載の装着型機器であって、
前記刺激部は、振動部を含み、
前記第1処理部は、前記第1情報に基づいて、前記物理量の周期で、前記振動部を振動させる、装着型機器。 - 請求項9から請求項11のいずれか一つに記載の装着型機器と、
第2装着型機器と
を備え、
前記第2装着型機器は、
周期的に変化する生体情報を検出するセンサと、
前記生体情報に基づく情報を、前記第1情報として前記装着型機器へと送信する第2通信部と
を備える、装着型機器システム。 - 請求項9から請求項11のいずれか一つに記載の装着型機器と、
第2装着型機器と
を備え、
前記第2装着型機器は、
加速度を検出するセンサと、
前記加速度に基づく情報を、前記第1情報として前記装着型機器へと送信する第2通信部と
を備える、装着型機器システム。 - 請求項1〜3,6,7,9〜11のいずれか一つに記載の装着型機器であって、
前記物理量を検出するセンサと、
入力部と
を更に備え、
前記第1処理部は、
前記物理量に基づく前記第1情報を、前記第1通信部を介して外部装置に送信して、前記外部装置に前記第1情報を格納させ、
前記入力部への入力に応答して前記外部装置から前記第1情報を取得し、
前記第1情報に基づいて、前記物理量を再現すべく、前記刺激部に前記第1ユーザの前記感覚器を刺激させる、装着型機器。 - 請求項9に記載の装着型機器であって、
加速度を繰り返し検出するセンサと、
前記装着型機器の位置を繰り返し取得する位置取得部と、
入力部と
を更に備え、
前記第1処理部は、
前記物理量と前記位置を互いに対応付けた情報を前記第1情報として、前記第1通信部を介して外部装置へ送信して、前記第1情報をログ情報として前記外部装置に格納させ、
前記入力部への入力に応答して前記外部装置から前記第1情報を取得し、
前記第1情報に含まれる各位置における過去の前記装着型機器の空間的な動きの周期を、前記第1情報に基づいて算出し、
前記位置取得部によって取得された位置と、前記第1情報における位置との差が小さいか否かを判断し、
前記差が小さいと判断したときに、前記位置に対応する前記周期で前記刺激部に前記第1ユーザの前記感覚器を刺激させる、装着型機器。 - 互いに通信可能な第1装着型機器および第2装着型機器を備え、
前記第1装着型機器は物理量を検出するセンサを備え、
前記第2装着型機器は、
可制御の刺激量でユーザの感覚器を刺激する刺激部と、
前記物理量を前記感覚器で再現するように、前記刺激部に前記感覚器を刺激させる処理部と
を備える、装着型機器システム。 - ユーザに装着される装着型機器の制御方法であって、
物理量に基づく第1情報を受信し、
前記第1情報に基づいて、前記物理量を前記ユーザの感覚器で再現するように、刺激部に前記感覚器を刺激させる、装着型機器の制御方法。 - 物理量に基づく第1情報を受信する第1通信部と、
可制御の刺激量で第1ユーザの皮膚の感覚器を刺激する刺激部と
を備える装着型機器の制御装置であって、
前記第1情報に基づいて、前記物理量を前記感覚器で再現するように、前記刺激部に前記感覚器を刺激させる処理部を備える、装着型機器の制御装置。 - 物理量に基づく第1情報を受信する第1通信部と、
可制御の刺激量で第1ユーザの皮膚の感覚器を刺激する刺激部と
を備える装着型機器の制御プログラムであって、
前記装着型機器に、前記第1情報に基づいて、前記物理量を前記感覚器で再現するように、前記刺激部に前記感覚器を刺激させる処理を実行させる、制御プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016106135A JP2017211911A (ja) | 2016-05-27 | 2016-05-27 | 装着型機器、装着型機器システム、装着型機器の制御方法、装着型機器の制御装置および制御プログラム |
| PCT/JP2017/019316 WO2017204242A1 (ja) | 2016-05-27 | 2017-05-24 | 装着型機器、装着型機器システムおよび装着型機器の制御方法 |
| US16/305,013 US11300998B2 (en) | 2016-05-27 | 2017-05-24 | Wearable device to stimulate sense organs in the skin of a user, wearable device system, and method for controlling wearable device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016106135A JP2017211911A (ja) | 2016-05-27 | 2016-05-27 | 装着型機器、装着型機器システム、装着型機器の制御方法、装着型機器の制御装置および制御プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017211911A true JP2017211911A (ja) | 2017-11-30 |
Family
ID=60411402
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016106135A Pending JP2017211911A (ja) | 2016-05-27 | 2016-05-27 | 装着型機器、装着型機器システム、装着型機器の制御方法、装着型機器の制御装置および制御プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11300998B2 (ja) |
| JP (1) | JP2017211911A (ja) |
| WO (1) | WO2017204242A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020161921A1 (ja) * | 2019-02-08 | 2020-08-13 | 株式会社ソニー・インタラクティブエンタテインメント | 巻取装置、クレードル及び装着システム |
| JP2021022005A (ja) * | 2019-07-24 | 2021-02-18 | トヨタ紡織株式会社 | 情報処理装置および制御方法 |
| JPWO2021157049A1 (ja) * | 2020-02-07 | 2021-08-12 | ||
| JP2023064691A (ja) * | 2021-10-26 | 2023-05-11 | 花王株式会社 | 触覚呈示システム、触覚情報受信装置及び触覚情報送受信装置 |
| JP2023119492A (ja) * | 2022-02-16 | 2023-08-28 | Kddi株式会社 | 携帯機器から人の掌に触感刺激を与える付属装置、プログラム及び方法 |
| JP2024094371A (ja) * | 2022-02-15 | 2024-07-09 | 株式会社栗本鐵工所 | 触覚提示システムおよびプログラム |
| WO2025069204A1 (ja) * | 2023-09-26 | 2025-04-03 | 株式会社ソニー・インタラクティブエンタテインメント | 装着具及び圧覚提示装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6894252B2 (ja) * | 2017-02-16 | 2021-06-30 | 日本光電工業株式会社 | センサ装置及び見守り装置 |
| CN111918612A (zh) * | 2018-06-05 | 2020-11-10 | 谷和雄 | 血流量测定系统 |
| WO2020141443A1 (en) * | 2019-01-02 | 2020-07-09 | Weart S.R.L. | Sensing device suitable for haptic perception applications |
| CA3157461A1 (en) * | 2019-11-07 | 2021-05-14 | Fernando Juan Hernandez | Systems, devises, and methods including a heartbeat mimetic |
| US12474223B2 (en) | 2021-09-24 | 2025-11-18 | Apple Inc. | Temperature sensing systems and methods including multiple temperature sensors |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007143812A (ja) | 2005-11-28 | 2007-06-14 | Seiko Epson Corp | 装着型機器 |
| US8123660B2 (en) * | 2007-12-28 | 2012-02-28 | Immersion Corporation | Method and apparatus for providing communications with haptic cues |
| JP5854054B2 (ja) * | 2011-11-15 | 2016-02-09 | ソニー株式会社 | 情報処理装置及び方法 |
| US9746945B2 (en) * | 2011-12-19 | 2017-08-29 | Qualcomm Incorporated | Integrating sensation functionalities into a mobile device using a haptic sleeve |
| JP6103350B2 (ja) * | 2012-12-18 | 2017-03-29 | カシオ計算機株式会社 | 運動支援装置、運動支援方法および運動支援プログラム |
| DE202014010799U1 (de) * | 2013-10-29 | 2016-10-19 | Nordin Kouache | System zur Übermittlung von taktilen Anweisungen an einen menschlichen Körper |
| JP6094476B2 (ja) * | 2013-12-27 | 2017-03-15 | カシオ計算機株式会社 | 撮影システム、その制御方法、および、その制御プログラム |
| KR102244856B1 (ko) * | 2014-04-22 | 2021-04-27 | 삼성전자 주식회사 | 웨어러블 장치와의 사용자 인터랙션을 제공하는 방법 및 이를 수행하는 웨어러블 장치 |
| JP2016051319A (ja) | 2014-08-29 | 2016-04-11 | ソニー株式会社 | 力覚提示デバイス、力覚提示システム、および力覚提示方法 |
| US10437335B2 (en) * | 2015-04-14 | 2019-10-08 | John James Daniels | Wearable electronic, multi-sensory, human/machine, human/human interfaces |
-
2016
- 2016-05-27 JP JP2016106135A patent/JP2017211911A/ja active Pending
-
2017
- 2017-05-24 US US16/305,013 patent/US11300998B2/en active Active
- 2017-05-24 WO PCT/JP2017/019316 patent/WO2017204242A1/ja not_active Ceased
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020161921A1 (ja) * | 2019-02-08 | 2020-08-13 | 株式会社ソニー・インタラクティブエンタテインメント | 巻取装置、クレードル及び装着システム |
| JPWO2020161921A1 (ja) * | 2019-02-08 | 2021-10-28 | 株式会社ソニー・インタラクティブエンタテインメント | 巻取装置、クレードル及び装着システム |
| JP7160955B2 (ja) | 2019-02-08 | 2022-10-25 | 株式会社ソニー・インタラクティブエンタテインメント | 巻取装置、クレードル及び装着システム |
| JP2021022005A (ja) * | 2019-07-24 | 2021-02-18 | トヨタ紡織株式会社 | 情報処理装置および制御方法 |
| JPWO2021157049A1 (ja) * | 2020-02-07 | 2021-08-12 | ||
| JP2023064691A (ja) * | 2021-10-26 | 2023-05-11 | 花王株式会社 | 触覚呈示システム、触覚情報受信装置及び触覚情報送受信装置 |
| JP7847051B2 (ja) | 2021-10-26 | 2026-04-16 | 花王株式会社 | 触覚呈示システム、触覚情報受信装置及び触覚情報送受信装置 |
| JP2024094371A (ja) * | 2022-02-15 | 2024-07-09 | 株式会社栗本鐵工所 | 触覚提示システムおよびプログラム |
| JP2023119492A (ja) * | 2022-02-16 | 2023-08-28 | Kddi株式会社 | 携帯機器から人の掌に触感刺激を与える付属装置、プログラム及び方法 |
| WO2025069204A1 (ja) * | 2023-09-26 | 2025-04-03 | 株式会社ソニー・インタラクティブエンタテインメント | 装着具及び圧覚提示装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11300998B2 (en) | 2022-04-12 |
| US20210223817A1 (en) | 2021-07-22 |
| WO2017204242A1 (ja) | 2017-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017211911A (ja) | 装着型機器、装着型機器システム、装着型機器の制御方法、装着型機器の制御装置および制御プログラム | |
| US11861266B2 (en) | Voice assistant for wireless earpieces | |
| US12182474B2 (en) | Wireless earpiece with a passive virtual assistant | |
| US10478099B2 (en) | Systems and methods for determining axial orientation and location of a user's wrist | |
| US10313779B2 (en) | Voice assistant system for wireless earpieces | |
| JP6878569B2 (ja) | 改善された行動監視のために健康器具との接続性を有する着用可能コンピュータ | |
| KR101824921B1 (ko) | 제스처 기반 통신 서비스 수행 방법 및 장치 | |
| CN110554773B (zh) | 用于产生定向声音和触觉感觉的触觉装置 | |
| JP2019166327A (ja) | 人体に触覚指示を伝達するための方法およびシステム | |
| US20150187188A1 (en) | Communications using tactile stimuli on wearable devices | |
| US11036293B2 (en) | Method for using fingers to interact with a smart glove worn on a hand | |
| JP2017151950A (ja) | ハプティック効果競合の回避 | |
| WO2015083183A1 (en) | Hand wearable haptic feedback based navigation device | |
| KR20170104541A (ko) | 네비게이션 디바이스들 및 방법들 | |
| JP2011516915A (ja) | モーションコンテンツベースの学習装置及び方法 | |
| US20140335494A1 (en) | Systems and methods for facilitating coaching and/or analysis of pressure-based treatment | |
| JP5873431B2 (ja) | マッサージ装置 | |
| JP2021528179A (ja) | カロリー消費モデルを使用する行動監視を改善するために健康器具との接続性を備えた着用可能コンピュータ | |
| WO2017094211A1 (ja) | 力覚提示装置、認識装置、制御装置、および力覚提示方法 | |
| WO2017006624A1 (ja) | 行動通知システム、運動情報測定装置、電子機器、行動通知方法、行動通知プログラム | |
| KR20190073045A (ko) | 음악을 추천하기 위한 장치, 이를 위한 방법 및 이 방법을 수행하는 프로그램이 기록된 컴퓨터 판독 가능한 기록매체 | |
| US10398374B2 (en) | Manual operation assistance with earpiece with 3D sound cues | |
| US20210015418A1 (en) | Information processing system, information processing apparatus, and information processing method | |
| KR20140106309A (ko) | 포스피드백 기능을 구비한 가상현실 입력장치 |