JP2017227591A - 信号処理回路、物理量検出装置、姿勢演算装置、電子機器及び移動体 - Google Patents
信号処理回路、物理量検出装置、姿勢演算装置、電子機器及び移動体 Download PDFInfo
- Publication number
- JP2017227591A JP2017227591A JP2016125419A JP2016125419A JP2017227591A JP 2017227591 A JP2017227591 A JP 2017227591A JP 2016125419 A JP2016125419 A JP 2016125419A JP 2016125419 A JP2016125419 A JP 2016125419A JP 2017227591 A JP2017227591 A JP 2017227591A
- Authority
- JP
- Japan
- Prior art keywords
- physical quantity
- signal
- signal processing
- posture calculation
- processing circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 253
- 238000012545 processing Methods 0.000 title claims abstract description 154
- 230000001133 acceleration Effects 0.000 claims description 18
- 238000012937 correction Methods 0.000 claims description 14
- 239000011159 matrix material Substances 0.000 claims description 9
- 238000004891 communication Methods 0.000 description 64
- 230000006870 function Effects 0.000 description 21
- 238000006243 chemical reaction Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 14
- 238000000034 method Methods 0.000 description 11
- 238000005452 bending Methods 0.000 description 9
- 230000010355 oscillation Effects 0.000 description 9
- 230000005284 excitation Effects 0.000 description 8
- 238000012986 modification Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 230000001360 synchronised effect Effects 0.000 description 7
- 230000008569 process Effects 0.000 description 6
- 235000015429 Mirabilis expansa Nutrition 0.000 description 5
- 244000294411 Mirabilis expansa Species 0.000 description 5
- 235000013536 miso Nutrition 0.000 description 5
- 238000011161 development Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 4
- -1 Metal Oxide Nitride Chemical class 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 239000008186 active pharmaceutical agent Substances 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 239000010453 quartz Substances 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 238000009966 trimming Methods 0.000 description 3
- 239000013078 crystal Substances 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 238000010606 normalization Methods 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 241000251468 Actinopterygii Species 0.000 description 1
- PIGFYZPCRLYGLF-UHFFFAOYSA-N Aluminum nitride Chemical compound [Al]#N PIGFYZPCRLYGLF-UHFFFAOYSA-N 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- 235000015842 Hesperis Nutrition 0.000 description 1
- 101000741965 Homo sapiens Inactive tyrosine-protein kinase PRAG1 Proteins 0.000 description 1
- 235000012633 Iberis amara Nutrition 0.000 description 1
- 102100038659 Inactive tyrosine-protein kinase PRAG1 Human genes 0.000 description 1
- 229910013641 LiNbO 3 Inorganic materials 0.000 description 1
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000005520 electrodynamics Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 229940050561 matrix product Drugs 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images















Landscapes
- Gyroscopes (AREA)
- Navigation (AREA)
Abstract
【解決手段】物理量検出素子の出力信号に基づいて第1の物理量信号を生成する検出回路と、前記第1の物理量信号を出力可能な第1の端子と、第2〜第N(N≧2)の物理量信号を入力可能な第2の端子と、前記第1〜第Nの物理量信号に基づいて姿勢演算を実行可能な姿勢演算部と、を含む、信号処理回路。
【選択図】図1
Description
本適用例に係る信号処理回路は、物理量検出素子の出力信号に基づいて第1の物理量信号を生成する検出回路と、前記第1の物理量信号を出力可能な第1の端子と、第2〜第N(N≧2)の物理量信号を入力可能な第2の端子と、前記第1〜第Nの物理量信号に基づいて姿勢演算を実行可能な姿勢演算部と、を含む。
路によれば、従来よりも姿勢演算の周期が短くなり、姿勢演算の精度を向上させることができる。
上記適用例に係る信号処理回路において、前記姿勢演算部は、クォータニオンを用いて前記姿勢演算を行ってもよい。
上記適用例に係る信号処理回路において、前記姿勢演算部は、前記姿勢演算として、前記第1〜第Nの物理量信号の各々を積分して第1〜第Nの角度を算出してもよい。
上記適用例に係る信号処理回路において、前記姿勢演算部は、回転行列を用いて前記姿勢演算を行ってもよい。
上記適用例に係る信号処理回路は、前記物理量検出素子を駆動するための駆動信号を生成する駆動回路を含み、前記姿勢演算部は、前記駆動信号に基づくクロック信号を用いて前記姿勢演算を行ってもよい。
上記適用例に係る信号処理回路は、前記第1〜第Nの物理量信号と第1〜第Nの検出軸との対応関係の設定情報を記憶する記憶部を含み、前記姿勢演算部は、前記設定情報を用いて前記姿勢演算を行ってもよい。
上記適用例に係る信号処理回路において、前記第1〜第Nの物理量信号の各々は角速度
信号であってもよい。
上記適用例に係る信号処理回路は、加速度検出素子及び地磁気検出素子の少なくとも一方の出力信号に基づいて、前記姿勢演算部による前記姿勢演算を補正する補正処理部を含んでもよい。
本適用例に係る物理量検出装置は、上記のいずれかの信号処理回路と、物理量検出素子と、を備えている。
本適用例に係る姿勢演算装置は、上記の物理量検出装置をN個備え、第1の前記物理量検出装置が備えている前記信号処理回路の前記第2の端子と、第2〜第Nの前記物理量検出装置の各々が備えている前記信号処理回路の前記第1の端子とが電気的に接続され、前記第1の前記物理量検出装置が備えている前記信号処理回路の前記姿勢演算部が前記姿勢演算を行う。
本適用例に係る電子機器は、上記の姿勢演算装置を備えている。
本適用例に係る移動体は、上記の姿勢演算装置を備えている。
1−1.本実施形態
図1は、本実施形態の物理量検出装置の機能ブロック図である。本実施形態の物理量検出装置1は、物理量に関わるアナログ信号を出力する物理量検出素子(センサー素子)2と信号処理回路3を含んで構成されている。
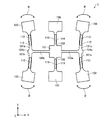
、例えば、Zカットの水晶基板により形成されたダブルT型の振動片を有する。水晶を材料とする振動片は、温度変化に対する共振周波数の変動が極めて小さいので、角速度の検出精度を高めることができるという利点がある。なお、図2におけるX軸、Y軸、Z軸は水晶の軸を示す。
も幅の広い矩形状の錘部103が形成されている。駆動振動腕101a、101bの先端に錘部103を形成することにより、コリオリ力を大きくするとともに、所望の共振周波数を比較的短い振動腕で得ることができる。同様に、検出振動腕102の先端には、検出振動腕102よりも幅の広い錘部106が形成されている。検出振動腕102の先端に錘部106を形成することにより、検出電極114、115に発生する交流電荷を大きくすることができる。
同期検波する。同期検波回路33は、例えば、検波信号SDETがハイレベルの時は可変ゲインアンプ32から出力される2つの信号をそのまま出力し、検波信号SDETがローレベルの時は可変ゲインアンプ32から出力される2つの信号をそれぞれ基準電圧VR1に対して反転した2つの信号を出力する回路として構成することができる。
メモリー62)に記憶されている、第1〜第3の物理量信号と、第1〜第3の検出軸として互いに直交するx軸、y軸、z軸との対応関係の設定情報を用いて、例えば、第1の物理量信号としてのデジタルデータ(角速度ω1)をx軸回りの角速度データ(角速度ωx)と認識し、第2の物理量信号としてのデジタルデータ(角速度ω2)をy軸回りの角速度データ(角速度ωy)と認識し、第3の物理量信号としてのデジタルデータ(角速度ω3)をz軸回りの角速度データ(角速度ωz)と認識する。そして、姿勢演算部40は、x軸回りの角速度ωx(=ω1)、y軸回りの角速度ωy(=ω2)及びz軸回りの角速度ωz(=ω3)に基づき、クォータニオンを用いて姿勢演算を行うことができる。例えば、姿勢演算部40は、3軸分の角速度ωx,ωy,ωzを取得する毎に、式(1)に従ってクォータニオンqを更新し、更新したクォータニオンqを式(2)に従って正規化することにより、姿勢演算を行う。

演算部47、加算器48及び正規化部49を含んで構成されている。なお、図6では、姿勢演算の許可/禁止を制御するための構成は省略されている。
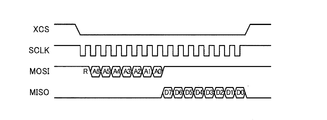
回路のいずれか一方として機能する。例えば、第1インターフェース回路70は、XCS端子がローレベルのときは、SPIインターフェース回路として機能し、SCLK端子を介してクロック信号が入力され、MOSI端子を介してデータ信号が入力され、MISO端子を介してデータ信号が出力される。また、第1インターフェース回路70は、XCS端子がハイレベルのときは、I2Cインターフェース回路として機能し、SCLK端子を介してクロック信号が入力され、MOSI端子を介してデータ信号が入出力される。図7〜図9に、第1インターフェース回路70がSPIインターフェース回路として機能するときの、第1インターフェース回路70を介した通信フォーマット(XCS端子、SCLK端子、MOSI端子及びMISO端子の信号波形)の一例を示す。図7は、第1の外部装置が、レジスター61の所定のアドレスにデータを書き込むときの通信フォーマットである。また、図8は、第1の外部装置が、レジスター61の所定のアドレスからデータを読み出すときの通信フォーマットである。また、図9は、第1の外部装置が所定のコマンドを送信するときの通信フォーマットである。図7〜図9において、Rは読み出しビット、Wは書き込みビット、A6〜A0は7ビットアドレス、D7〜D0は8ビットデータである。
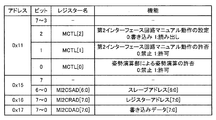
ス0x02に記憶されているスレーブアドレスを用い、レジスターアドレスMI2CRAD[7:0]としてアドレス0x04に記憶されているレジスターアドレスを用いることにより、第2インターフェース回路80を介して、第3の外部装置から、読み出しデータMI2CRD[6:0]として第3の物理量信号としてのデジタルデータ(角速度ω3)を読み出す。このように、物理量検出装置1(信号処理回路3)は、MSDA端子(「第2の端子」の一例)から第2〜第Nの物理量信号としてのデジタルデータ(角速度データ)に構成されている。
理量信号を出力する回路(スレーブ)として機能することもできる。従って、例えば、第1の信号処理回路3のMSDA端子と第2〜第Nの信号処理回路3の各々のMOSI端子とを電気的に接続することにより、第1の信号処理回路3が第1の物理量信号を生成し、かつ、第2〜第Nの信号処理回路3から第2〜第Nの物理量信号を取得して、姿勢演算を実行する姿勢演算装置を構成することができる。このような姿勢演算装置は、同じ構成のN個の信号処理回路3を用いて実現することができるので、開発コストを削減することができる。
上記の物理量検出装置1(信号処理回路3)では、姿勢演算部40は、第1〜第Nの物理量信号に基づいてクォータニオンを用いて姿勢演算を行い、あるいは、姿勢演算として、第1〜第Nの物理量信号の各々を積分して第1〜第Nの角度を算出するが、姿勢演算部40は、姿勢演算として、第1〜第Nの物理量信号に基づいて回転行列を用いて姿勢演算を行ってもよい。この変形例の物理量検出装置1(信号処理回路3)では、例えば、姿勢演算部40は、3軸の角速度データ(角速度ω1,ω2,ω3)を取得する毎に、記憶部60(不揮発性メモリー62)に記憶されている、第1〜第3の物理量信号とx軸、y軸、z軸との対応関係の設定情報に基づいて、Δtごとに、角速度ω1,ω2,ω3をx軸回りの角速度ωx、y軸回りの角速度ωy及びz軸回りの角速度ωzに変換して式(4)で表される回転行列を計算し、当該回転行列と現在の姿勢ベクトルとの積を計算することにより姿勢ベクトルを更新する。
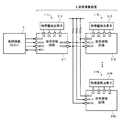
図17は、本実施形態の姿勢演算装置の構成例を示す図である。図17に示すように、本実施形態の姿勢演算装置4は、N個の物理量検出装置1−1〜1−Nを備えている。物理量検出装置1−1〜1−Nは、すべて、上述した本実施形態又は変形例の物理量検出装置1であり、各物理量検出装置1−k(k=1〜N)は、物理量検出素子2−k及び信号処理回路3−kを備えている。
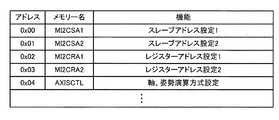
レジスターRDAR)に記憶する。なお、信号処理回路3−1の姿勢演算部40は、不揮発性メモリー62のアドレス0x04のビット1〜0(AXISCTL[1:0])に応じて、第1〜第3の物理量信号(角速度ω1,ω2,ω3)を3軸角速度ωx,ωy,ωzに変換し、不揮発性メモリー62のアドレス0x04のビット2(AXISCTL[2])の設定に応じて、姿勢演算として角度演算又はクォータニオン演算を行う。
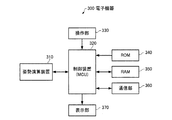
図19は、本実施形態の電子機器の構成の一例を示す機能ブロック図である。図19に示すように、本実施形態の電子機器300は、姿勢演算装置310、制御装置(MCU)320、操作部330、ROM(Read Only Memory)340、RAM(Random Access Memory)350、通信部360、表示部370を含んで構成されている。なお、本実施形態の電子機器は、図19の構成要素(各部)の一部を省略又は変更し、あるいは、他の構成
要素を付加した構成としてもよい。
る。ここで、通常のカメラは、被写体の光像により銀塩写真フィルムを感光するのに対し、デジタルカメラ1300は、被写体の光像をCCD(Charge Coupled Device)などの撮像素子により光電変換して撮像信号(画像信号)を生成する。
図21は、本実施形態の移動体の一例を示す図(上面図)である。図21に示す移動体400は、姿勢演算装置410、コントローラー440,450,460、バッテリー470、ナビゲーション装置480を含んで構成されている。なお、本実施形態の移動体は、図21の構成要素(各部)の一部を省略し、あるいは、他の構成要素を付加した構成としてもよい。
る。
Claims (12)
- 物理量検出素子の出力信号に基づいて第1の物理量信号を生成する検出回路と、
前記第1の物理量信号を出力可能な第1の端子と、
第2〜第N(N≧2)の物理量信号を入力可能な第2の端子と、
前記第1〜第Nの物理量信号に基づいて姿勢演算を実行可能な姿勢演算部と、を含む、信号処理回路。 - 前記姿勢演算部は、クォータニオンを用いて前記姿勢演算を行う、請求項1に記載の信号処理回路。
- 前記姿勢演算部は、前記姿勢演算として、前記第1〜第Nの物理量信号の各々を積分して第1〜第Nの角度を算出する、請求項1に記載の信号処理回路。
- 前記姿勢演算部は、回転行列を用いて前記姿勢演算を行う、請求項1に記載の信号処理回路。
- 前記物理量検出素子を駆動するための駆動信号を生成する駆動回路を含み、
前記姿勢演算部は、前記駆動信号に基づくクロック信号を用いて前記姿勢演算を行う、請求項1乃至4のいずれか1項に記載の信号処理回路。 - 前記第1〜第Nの物理量信号と第1〜第Nの検出軸との対応関係の設定情報を記憶する記憶部を含み、
前記姿勢演算部は、前記設定情報を用いて前記姿勢演算を行う、請求項1乃至5のいずれか1項に記載の信号処理回路。 - 前記第1〜第Nの物理量信号の各々は角速度信号である、請求項1乃至6のいずれか1項に記載の信号処理回路。
- 加速度検出素子及び地磁気検出素子の少なくとも一方の出力信号に基づいて、前記姿勢演算部による前記姿勢演算を補正する補正処理部を含む、請求項6又は7に記載の信号処理回路。
- 請求項1乃至8のいずれか1項に記載の信号処理回路と、前記物理量検出素子と、を備えている物理量検出装置。
- 請求項9に記載の物理量検出装置をN個備え、
第1の前記物理量検出装置が備えている前記信号処理回路の前記第2の端子と、第2〜第Nの前記物理量検出装置の各々が備えている前記信号処理回路の前記第1の端子とが電気的に接続され、
前記第1の前記物理量検出装置が備えている前記信号処理回路の前記姿勢演算部が前記姿勢演算を行う、姿勢演算装置。 - 請求項10に記載の姿勢演算装置を備えている、電子機器。
- 請求項10に記載の姿勢演算装置を備えている、移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016125419A JP6808997B2 (ja) | 2016-06-24 | 2016-06-24 | 信号処理回路、物理量検出装置、姿勢演算装置、電子機器及び移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016125419A JP6808997B2 (ja) | 2016-06-24 | 2016-06-24 | 信号処理回路、物理量検出装置、姿勢演算装置、電子機器及び移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017227591A true JP2017227591A (ja) | 2017-12-28 |
| JP6808997B2 JP6808997B2 (ja) | 2021-01-06 |
Family
ID=60889173
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016125419A Expired - Fee Related JP6808997B2 (ja) | 2016-06-24 | 2016-06-24 | 信号処理回路、物理量検出装置、姿勢演算装置、電子機器及び移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6808997B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140324392A1 (en) * | 2013-04-24 | 2014-10-30 | Seiko Epson Corporation | Physical quantity detection circuit, physical quantity detector, electronic apparatus and moving object |
| CN113227709A (zh) * | 2018-12-20 | 2021-08-06 | 罗伯特·博世有限公司 | 具有微机械的时钟发生系统部件的系统 |
| CN113741262A (zh) * | 2021-08-27 | 2021-12-03 | 天津新松智能科技有限公司 | 一种船舶控制系统 |
| WO2023026470A1 (ja) * | 2021-08-27 | 2023-03-02 | 国立大学法人東北大学 | 磁場センサおよび磁場検出方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007183138A (ja) * | 2006-01-05 | 2007-07-19 | Kenzo Nonami | 小型姿勢センサ |
| JP2011503522A (ja) * | 2007-07-06 | 2011-01-27 | インベンセンス インコーポレイテッド | Mems慣性感知及び内蔵デジタルエレクトロニクスを備えた統合運動処理ユニット(mpu) |
| JP2014190900A (ja) * | 2013-03-28 | 2014-10-06 | Seiko Epson Corp | 位置算出方法及び位置算出装置 |
| JP2014211350A (ja) * | 2013-04-18 | 2014-11-13 | セイコーエプソン株式会社 | 電子デバイス、集積回路、電子機器及び移動体 |
| JP2015184158A (ja) * | 2014-03-25 | 2015-10-22 | セイコーエプソン株式会社 | 誤差推定方法、運動解析方法、誤差推定装置及びプログラム |
| JP2015184181A (ja) * | 2014-03-25 | 2015-10-22 | セイコーエプソン株式会社 | 物理量検出用回路、物理量検出装置、電子機器及び移動体 |
-
2016
- 2016-06-24 JP JP2016125419A patent/JP6808997B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007183138A (ja) * | 2006-01-05 | 2007-07-19 | Kenzo Nonami | 小型姿勢センサ |
| JP2011503522A (ja) * | 2007-07-06 | 2011-01-27 | インベンセンス インコーポレイテッド | Mems慣性感知及び内蔵デジタルエレクトロニクスを備えた統合運動処理ユニット(mpu) |
| JP2014190900A (ja) * | 2013-03-28 | 2014-10-06 | Seiko Epson Corp | 位置算出方法及び位置算出装置 |
| JP2014211350A (ja) * | 2013-04-18 | 2014-11-13 | セイコーエプソン株式会社 | 電子デバイス、集積回路、電子機器及び移動体 |
| JP2015184158A (ja) * | 2014-03-25 | 2015-10-22 | セイコーエプソン株式会社 | 誤差推定方法、運動解析方法、誤差推定装置及びプログラム |
| JP2015184181A (ja) * | 2014-03-25 | 2015-10-22 | セイコーエプソン株式会社 | 物理量検出用回路、物理量検出装置、電子機器及び移動体 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140324392A1 (en) * | 2013-04-24 | 2014-10-30 | Seiko Epson Corporation | Physical quantity detection circuit, physical quantity detector, electronic apparatus and moving object |
| US10545165B2 (en) * | 2013-04-24 | 2020-01-28 | Seiko Epson Corporation | Physical quantity detection circuit, physical quantity detector, electronic apparatus and moving object |
| CN113227709A (zh) * | 2018-12-20 | 2021-08-06 | 罗伯特·博世有限公司 | 具有微机械的时钟发生系统部件的系统 |
| JP2022513504A (ja) * | 2018-12-20 | 2022-02-08 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | マイクロメカニカルなクロッキングシステムコンポーネントを備えたシステム |
| JP7212782B2 (ja) | 2018-12-20 | 2023-01-25 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | マイクロメカニカルなクロッキングシステムコンポーネントを備えたシステム |
| US11959747B2 (en) | 2018-12-20 | 2024-04-16 | Robert Bosch Gmbh | Micromechanical clocking system with improved timing precision |
| CN113741262A (zh) * | 2021-08-27 | 2021-12-03 | 天津新松智能科技有限公司 | 一种船舶控制系统 |
| WO2023026470A1 (ja) * | 2021-08-27 | 2023-03-02 | 国立大学法人東北大学 | 磁場センサおよび磁場検出方法 |
| JPWO2023026470A1 (ja) * | 2021-08-27 | 2023-03-02 | ||
| JP7614666B2 (ja) | 2021-08-27 | 2025-01-16 | 国立大学法人東北大学 | 磁場センサおよび磁場検出方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6808997B2 (ja) | 2021-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108627147B (zh) | 传感器元件控制装置、物理量传感器及其故障诊断方法 | |
| JP6222426B2 (ja) | 物理量検出回路、物理量検出装置、電子機器及び移動体 | |
| JP6834581B2 (ja) | 物理量センサー、電子機器及び移動体 | |
| JP7151061B2 (ja) | 故障判定回路、物理量検出装置、電子機器、移動体及び故障判定方法 | |
| US10116275B2 (en) | Physical quantity detection circuit, physical quantity detection device, electronic apparatus, and vehicle | |
| CN108664347B (zh) | 故障判定电路、物理量检测装置、电子设备以及移动体 | |
| JP2016178601A (ja) | データ処理回路、物理量検出用回路、物理量検出装置、電子機器及び移動体 | |
| JP6808997B2 (ja) | 信号処理回路、物理量検出装置、姿勢演算装置、電子機器及び移動体 | |
| JP7234655B2 (ja) | 物理量検出回路、物理量センサー、電子機器、移動体及び物理量検出回路の動作方法 | |
| JP7491439B2 (ja) | 物理量検出回路、物理量センサー、電子機器、及び移動体物理量センサー | |
| JP2021185356A (ja) | 物理量検出回路、物理量検出装置、電子機器及び移動体 | |
| JP2016153744A (ja) | 回路装置、物理量検出装置、電子機器及び移動体 | |
| JP7447571B2 (ja) | 物理量検出回路、物理量センサー、電子機器、移動体および物理量検出回路の動作方法 | |
| JP7456284B2 (ja) | 物理量検出回路、物理量検出装置、電子機器及び移動体 | |
| JP6465294B2 (ja) | 駆動回路、振動デバイス、電子機器及び移動体 | |
| JP6492739B2 (ja) | 回路装置、物理量検出装置、電子機器及び移動体 | |
| JP7322718B2 (ja) | 物理量検出回路、物理量センサー、電子機器、移動体及び物理量検出回路の動作方法 | |
| JP6521236B2 (ja) | 物理量処理回路、物理量処理装置、電子機器及び移動体 | |
| JP6780467B2 (ja) | 物理量センサー、電子機器及び移動体 | |
| JP7323015B2 (ja) | 物理量処理回路、物理量検出装置、電子機器、及び移動体 | |
| JP6756175B2 (ja) | 整流回路、駆動回路、物理量検出装置、電子機器及び移動体 | |
| JP6478034B2 (ja) | 角速度検出装置の評価方法、信号処理回路、角速度検出装置、電子機器及び移動体 | |
| JP6641874B2 (ja) | 物理量検出装置、電子機器および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190411 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200324 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201123 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6808997 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |