JP2017501817A - マルチスポット光凝固術のためのシステム及び装置 - Google Patents
マルチスポット光凝固術のためのシステム及び装置 Download PDFInfo
- Publication number
- JP2017501817A JP2017501817A JP2016543145A JP2016543145A JP2017501817A JP 2017501817 A JP2017501817 A JP 2017501817A JP 2016543145 A JP2016543145 A JP 2016543145A JP 2016543145 A JP2016543145 A JP 2016543145A JP 2017501817 A JP2017501817 A JP 2017501817A
- Authority
- JP
- Japan
- Prior art keywords
- probe
- displacement
- angular rotation
- motor
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000000649 photocoagulation Effects 0.000 title claims abstract description 14
- 239000000523 sample Substances 0.000 claims abstract description 171
- 238000006073 displacement reaction Methods 0.000 claims abstract description 60
- 238000011282 treatment Methods 0.000 claims description 23
- 239000000835 fiber Substances 0.000 claims description 19
- 238000011269 treatment regimen Methods 0.000 claims description 15
- 239000013307 optical fiber Substances 0.000 claims description 7
- 230000003287 optical effect Effects 0.000 claims description 4
- 238000005286 illumination Methods 0.000 claims 1
- 210000001525 retina Anatomy 0.000 abstract description 15
- 238000000034 method Methods 0.000 abstract description 14
- 238000002647 laser therapy Methods 0.000 abstract description 2
- 238000013532 laser treatment Methods 0.000 abstract description 2
- 238000006243 chemical reaction Methods 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000011477 surgical intervention Methods 0.000 description 2
- 206010002091 Anaesthesia Diseases 0.000 description 1
- 206010002329 Aneurysm Diseases 0.000 description 1
- 208000009857 Microaneurysm Diseases 0.000 description 1
- 230000037005 anaesthesia Effects 0.000 description 1
- 210000004087 cornea Anatomy 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting in contact-lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/008—Methods or devices for eye surgery using laser
- A61F9/00821—Methods or devices for eye surgery using laser for coagulation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B2018/2005—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser with beam delivery through an interstitially insertable device, e.g. needle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B2018/2015—Miscellaneous features
- A61B2018/2025—Miscellaneous features with a pilot laser
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B18/22—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser the beam being directed along or through a flexible conduit, e.g. an optical fibre; Couplings or hand-pieces therefor
- A61B2018/2205—Characteristics of fibres
- A61B2018/2211—Plurality of fibres
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B18/22—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser the beam being directed along or through a flexible conduit, e.g. an optical fibre; Couplings or hand-pieces therefor
- A61B2018/2238—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser the beam being directed along or through a flexible conduit, e.g. an optical fibre; Couplings or hand-pieces therefor with means for selectively laterally deflecting the tip of the fibre
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B18/22—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser the beam being directed along or through a flexible conduit, e.g. an optical fibre; Couplings or hand-pieces therefor
- A61B2018/2247—Fibre breakage detection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B18/22—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser the beam being directed along or through a flexible conduit, e.g. an optical fibre; Couplings or hand-pieces therefor
- A61B2018/225—Features of hand-pieces
- A61B2018/2253—Features of hand-pieces characterised by additional functions, e.g. surface cooling or detecting pathological tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B18/22—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser the beam being directed along or through a flexible conduit, e.g. an optical fibre; Couplings or hand-pieces therefor
- A61B2018/2255—Optical elements at the distal end of probe tips
- A61B2018/2266—Optical elements at the distal end of probe tips with a lens, e.g. ball tipped
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting in contact-lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/008—Methods or devices for eye surgery using laser
- A61F2009/00861—Methods or devices for eye surgery using laser adapted for treatment at a particular location
- A61F2009/00863—Retina
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting in contact-lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/008—Methods or devices for eye surgery using laser
- A61F2009/00897—Scanning mechanisms or algorithms
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Ophthalmology & Optometry (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Optics & Photonics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Vascular Medicine (AREA)
- Molecular Biology (AREA)
- Electromagnetism (AREA)
- Otolaryngology (AREA)
- Medical Informatics (AREA)
- Laser Surgery Devices (AREA)
- Radiation-Therapy Devices (AREA)
Abstract
本明細書では光凝固術システムを記載する。これは、眼内及び患者の網膜の近くでのマルチスポットレーザ治療処置を容易にする。一実施形態例においては、修正した眼内用プローブがレーザシステムで動作し、プローブ又はプローブの針を移動させる。これにより、マルチスポットパターンを、針(及び針先端)の回転移動を制御することで、患者の網膜に照射する。また、本システムは、針先端の操縦性及び角変位を容易にし、これらの異なる動作をレーザ光凝固術システムで同期させる。これにより、照準光を照射し、その後に、所望の露光時間及びパワーで所望のパターン箇所にレーザ治療光を照射する。
Description
本願は、2013年12月23日に出願された”SYSTEM AND DEVICE FOR MULTI SPOT PHOTOCOAGULATION”と題する、米国仮特許出願第61/920,202号の利益を主張する。この出願の全ての内容は、ここに参照として援用される。
本発明は、レーザ眼科外科的処置に関し、より詳細には、人の患者に行われる光凝固術処置に特に適した方法及びシステムに関する。
光凝固術が種々の眼科学的処置について利用されている。そのような処置は、スリットランプ(SL)レーザ搬送システム、又は外科的介入が必要なときは、眼内用レーザプローブのいずれか一方を用いて行われる。スリットランプシステムにおいては、レーザエネルギーは、レーザ源から単一の光ファイバを介して結像光学系に搬送され、処置は比較的高速かつ良品質の結果を生じ得る。既知のように、結像光学系は種々のコンタクトレンズと組み合わせて用いられ、ファイバの出力端(遠位)を網膜に集光することができなくてはならない。結像光学系の焦点距離は、典型的には可変、つまり、ズームして、ファイバの画像の大きさを網膜上で等倍から20倍に拡大する。これは、網膜上で50-1000ミクロンに相当する。現在のSLシステムは、外科的領域上に単一ポイント露光用の単一ファイバを用意している。外科医は、治療領域上にある低エネルギーの照準光を観察することで、所望の場所にファイバ画像を位置決めする。レーザをオン・オフする、及び照準光を動かすことで、外科医は治療領域上に複数スポットのパターンを施す。スポットの数は、治療領域の大きさと所望するレーザスポットの大きさにより決定される。網膜上のマイクロ動脈瘤への光凝固術では、レーザスポットの大きさは、周囲組織への損傷を回避するように小さく(<100ミクロン)するべきである。
スポットを位置決めし、レーザエネルギーを搬送する時間はSLの特性と外科医の技術に依存するが、典型的には1スポットあたり1秒である。これは、治療時間が30分を超えることを意味し、患者及び外科医を疲労させている。また、均一パターンを施すことは難しく、パターンは典型的には、幾何学的な分布というよりはランダムなものになる。治療が外科的介入を必要とするときは、SLは用いられず、その代わりに、標準的な眼内用レーザプローブが利用される。治療の目的は同じではあるが、眼内レーザ(又は眼内用の)プローブを用いて、患部に光凝固術の燃焼パターンを施す。外科医は、網膜に近い遠位先端を保持して、半径500ミクロンのスポットを1500-2000個施す。この処置は、30分以上かかる可能性がある。処置時間が長くなることによりハイリスクの患者群においては麻酔時間が長引く傾向に伴い、網膜の近くでプローブを用いると、偶発性涙のリスクを上昇させるかもしれない。
したがって、眼内用プローブ指向の処置において、スリットランプシステムの品質及び速度を向上させるシステムが必要である。
本明細書で記載する光凝固術システムの種々の実施形態によれば、眼内及び網膜の近くでマルチスポットレーザ治療処置を行うことが可能となる。一実施形態例においては、修正した眼内用プローブは、レーザシステムで動作し、プローブ又はプローブの針を動かす。これにより、針(及び針先端)の回転移動を制御することで、患者の網膜上にマルチスポットのパターンを照射する。また、システムは、針先端の操縦性及び角変位を容易にし、これらの異なる移動をレーザ光凝固術システムで同期させる。これにより、照準光を照射し、その後に、所望の露光時間及びパワーで所望のパターン箇所にレーザ治療光を照射する。この及び種々の実施形態例においては、光凝固術器は約514nmから約815nmまでの波長を用いる。これに限定されるものではないが、約532nmから約577nmまでの範囲が好ましい。
眼内用のプローブを用いて、一スポットずつのパターン及び治療を行う従来技術の方法とは異なり、本明細書で記載するシステムは、一つのスポットを複数のスポットに変換することによって、多数のマルチスポットパターンを生成することが可能である。この変換には、少なくとも一本の光ファイバを有する光学部材を用いて、一つのスポットがファイバ又はプローブの出力で複数のスポットに分割されることによる。または、この変換は、複数/多数の光ファイバがまとまった光学部材を用いて、パターン(整列又は治療)を搬送する。本明細書で教示する効果の一つは、眼内用プローブ又はその針(及び針先端)の機械的な(変換又は回転若しくは角度)移動でパターンを生成することができることである。
他の実施形態例においては、光凝固術システムは、標準的な眼科学的光凝固器レーザを含む。この光凝固器レーザは、プローブホルダ操作又は装置で同期を促進する。システムはさらに、特別に構成されたプローブホルダ装置を含む。このプローブホルダ装置は、眼内用プローブを保持し、このプローブ又は/及びそれの針、そして、最終的には針先端の移動制御ができるように構成される。システムは、固定角のシャフト又は針先端を有する、特別に構成された眼内用プローブ又は、別の選択肢としては、ホルダ装置ハウジング内で動作する角度調整可能な先端を有する針プローブも含む。このシステムは、固定角の先端のみを有する眼内用プローブを用いて、網膜内のマルチスポット治療を促進することになる。ここで、このプローブは、単純なパターン(単一の円周移動を描くことによる4点スポット正方形又はマルチスポット円等(以下で、さらに説明及び図示する))を形成し得る。関連実施形態においては、角度調整可能な先端を有する眼内用プローブを用いると、異なる半径の円周を有する(一例においては、同心円配置)複数の円周又は円周移動を描く又は形成することにより、ユーザは、複雑なパターン(大きい正方形、一又は二の円周又はサブパターンを利用したもの)を生成して、より大きい区画又は領域を埋め得る(本明細書の後半で図示する)。
関連実施形態においては、光凝固術レーザは、電気的、電子的及び通信能力を有するケーブルを介してプローブホルダを駆動するように構成された出力プラグで構成される。プローブレーザ先端(回転及び角変位)の移動とレーザ照準光及び治療光の搬送とを同期させる。問題がある際には、プローブレーザ先端の位置検出の安全性を確保する。また、ユーザが所望のパターンを選択し、全ての処理を制御できる特定のソフトウェアも追加することになる。
一実施形態例においては、角度変更可能な先端を有する眼内用プローブが提供されて、ユーザは、所望の位置にプローブを保持及び固定し得る。また、プローブ及び/又は針先端が、モータによる回転移動で駆動及び制御され得る。所望するプローブ又は針の角位置はレーザシステムから受信する。レーザシステムは、正確に位置決めする回転をセンサを用いて制御し、角回転位置を規制/監視する。また、レーザシステムは、所望のスポットごとの箇所で、所望の箇所又は位置で回転を止め得る。レーザシステムは、これらのプローブ/針位置を同期させて、整列又は治療光を所望の箇所でのみ搬送するようにする。プローブ又は針先端の場所又は位置が所望の、又は正しいものでないときは、位置制御の安全性を確保するため、治療光を停止する。所定の眼内用プローブが角度調整可能な先端を有する状態で、レーザシステムは、所定の位置で、プローブを保持若しくは固定するか、又はプローブ又は針の回転移動を別のモータを介して駆動及び制御してもよい。関連実施形態では、プローブ及び/又は針(若しくは先端)の移動、回転、長手方向の変換等は、アクチュエータ又はプッシュボタンを用い、モータを介して制御される。
関連実施形態においては、プローブホルダハウジングは、本明細書で記載する移動と似たような移動を促進するように構成可能である。プローブホルダは、所定の位置にプローブを固定する、又はプローブ若しくは針そのものの回転移動についての指示を操作部品ホルダ内のモータを介して送信する。プローブホルダアセンブリの一部としてアクチュエータを用いると、コマンドが送信されて、操作部品ホルダ内のモータによって針先端の角変位又は移動を促進する。関連実施形態においては、眼内用プローブに追加される機械的及び/又は電気的フィーチャにより、プローブ又は針若しくは針先の回転の位置決めを検査することができる。また、モータ及びセンサは、針を固定したままにし、いかなる移動もしない(回転及びそれ以外)ことを確保する。
一実施形態例においては、システムコントローラと、照準光及び治療光を生成するレーザ源とを含む光凝固術レーザシステムであって、システムは、遠位端と近位端を有するプローブを含み、近位端はレーザ源に結合される光ファイバケーブルに結合し、プローブの遠位端は眼科学的処置用に構成され、長手部分と該長手部分の端に角度のついた先端を有するように構成される。本実施形態例においては、プローブの遠位端は、角回転するように構成されて、そこに位置するスポットの整列パターン及び/又は治療パターンを形成する複数のスポットを有する少なくとも一つの円周を描く。システムは、プローブを保持するように構成され、システムコントローラと動作可能に通信するように構成されるプローブホルダをさらに含む。一実施形態例においては、システムは、プローブホルダを含み、プローブホルダは、プローブの長手方向の変位のための変位用モータと、プローブの変位用センサと、変位用モータと変位用センサとに動作可能に結合し、システムコントローラと通信するように構成される制御回路部材と、を含む。本実施形態においては、変位用モータは、プローブに動作可能に結合するアクチュエータと係合し、プローブの長手方向での変位を制御するように構成される。また、変位用センサは、プローブ上に位置する変位部材を感知するように構成され、プローブの変位移動を伝えるように構成される。
関連実施形態においては、プローブホルダは、プローブの角回転のための角回転用モータと、プローブの角回転用センサと、角回転用モータと角回転用センサとに動作可能に結合し、システムコントローラと通信するように構成される制御回路部材と、をさらに含む。本実施形態例においては、角回転用モータは、プローブに動作可能に結合するアクチュエータと係合し、プローブの角回転又は変位を制御するように構成され、角回転用センサは、プローブ上に位置する角回転部材を感知するように構成され、プローブの角回転移動を伝えるように構成される。
他の実施形態例においては、レーザ又は眼内用のプローブアセンブリが提供される。このアセンブリは、ハウジングと、眼内用のプローブの長手方向の変位のための変位用モータと、プローブの変位用センサと、変位用モータ及び変位用センサに動作可能に結合し、変位用モータ及び変位用センサを制御するように構成される制御回路部材と、を含む。本実施形態例においては、変位用モータは、プローブに動作可能に結合するアクチュエータと係合し、長手方向の移動を通じて、プローブの角変位を制御するように構成される。また、変位用センサは、前記プローブ上に位置する変位部材を感知するように構成され、前記プローブ又はプローブ先端の角変位移動を前記制御回路部材に伝えるように構成される。
本発明をより十分に以下にて、添付の図面を参照して記載するが、この発明の概要と、詳細な説明と、説明又はそれ以外の方法で開示される任意の好適及び/又は特定の実施形態と合わせて読んでもらうことを意図している本発明は、多くの異なる形態で具現化されてもよく、本明細書に記載した実施形態に限定して解釈されるべきはない。むしろ、これらの実施形態は、例示することのみを目的として提供されて、本開示は徹底かつ完全となり、当業者に発明の全範囲を十分に伝達するものとなっている。
本発明の他の目的及び効果は、添付の図面に関連して把握される、本発明の次の詳細な説明から明らかとなっている。
以下は、本開示による方法及び装置に関する種々の関連観念及び実施形態のより詳細な記述である。本開示は、医師により選択された治療の正確性及び信頼性を向上しつつ、眼の治療時間を縮める(speed up)、改善した診療及び治療システムについてのものである。上記に示し、下記により詳細に説明する主題の種々の観点は、その主題が特定の実装方式に限定されることなく、任意の多数の方法で実装してよいと理解するべきである。特定の実装及び用途の例を、説明を目的として主に提供する。
図面を参照する。図1は、本発明に従う、マルチスポット外科的レーザシステム10である。システム10は、レーザ光凝固術器20を含む。レーザ光凝固術器20は、フットスイッチ30に結合する。フットスイッチ30は、発射モード及びスリットランプ(とりわけ、光凝固術器に関連する項目)を制御する。レーザ光凝固術器20は、電気コード・ケーブル21を有して、システムに電力を供給し、いくつかの実施形態においては、同様に制御又は通信のために用いる。光凝固術器20は、スクリーン・ディスプレイ22を有して、ユーザ又は医師が、所望する整列及び/又は治療パターンを選択し、その他全ての治療パラメータ(これらに限られるものではないが、治療光の強度、露光時間等)を制御できるようにする。光学ファイバ24は、一端で光凝固術器20に、他端で手持部材・ホルダ40(handheld member or holder)に、動作可能に結合している。本実施形態例では、ファイバ24は眼内用プローブ50に動作可能に結合している。眼内用プローブ50は、プローブホルダ40内に収容してよい。眼内用プローブ50は、針52と、これに結合した針先端52Aと、を有する。この実施形態例においては、針先端52Aは、そこから出射する整列パターン60(及び、整列パターンを覆う治療パターンを作動するとき)を患者の網膜に照射する。このシステムにより構成可能及び生成するパターンをここで説明する。
図2Aから図2Gを参照する。図2Aから図2Gは、システム10及び本明細書で開示する種々の他のレーザシステムにより構成可能な種々の整列及び治療パターンである。本明細書で教示するシステムから生成され得る、可能なパターン例としては、(異なる大きさの、)正方形(square)、円、長方形、線がある。これらは、操作部品ホルダ40内にある、特定の修正した眼内用ファイバ24又は針52を一回又は複数回、回転する(turn)ことによって、複数のスポットで埋まる区画又は領域を規定する。これは、レーザ20と眼内用ファイバの針52との同期によって達成する。その結果、針先端52Aの回転させつつ(turn or rotate)、針先端での角変位を生成する(それにより、針先端での移動を照射する)ことになる。網膜上でのスポット半径は、眼内用ファイバ先端と目標組織との間の距離に応じて変化することになる。図2Aは、標準的な眼内用ファイバで生成される単一スポットを図示する。一方、図2Bは、システム10及びプローブ50を用いて生成した4点スポットパターン(小さい正方形)を図示する。このパターンは、結合又は接続した固定角の眼内用プローブ又は、別案として、調整可能な先端角を有する特定の眼内用プローブを用いて生成される。図2Cは、10点スポットを有する円形パターン例を図示する。このパターンは、結合した固定角の眼内用プローブ又は、調整可能な先端角に結合する眼内用プローブを約1回転させて生成する。
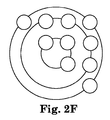
図2Dにおいては、12点スポットパターンの例を図示している。このパターンは、調整可能な先端角に結合した眼内用プローブを約2回転(turns or rotation)させて生成する。図2Eは、16点スポットパターンの例(4×4の正方形パターンになる)を図示する。このパターンは、調整可能な先端角に結合する眼内用プローブを約3回転させて生成する。図2Fは、10点スポット区画パターンのさらに別の例を図示する。このパターンは円弧パターンに類似し、調整可能な先端角に結合する眼内用プローブを約3回転させて生成する。図2Gは、8点スポット長方形パターンのさらに別の例を図示する。このパターンは、調整可能な先端角に結合する眼内用プローブを約2回転させて生成する。このため、当業者にとって、多数のパターン及び区画埋めスキームが本明細書で教示するレーザシステムで可能であることが明らかである。
さて、図3及び図4を参照する。プローブ操作ホルダ40の実施形態例を図示している。プローブ操作ホルダ40は、プローブハウジング40Aと、プローブ円筒状開口40Bとを含む。開口40Bは、ハウジング40Aの長さに及ぶ。開口40Bは、光学ファイバ51がプローブ50に結合した状態で、眼内用プローブ50を受け入れるように構成される。プローブハウジング40Aは、プローブ又は針52の先端の角度を駆動するように構成されるモータ41をその内部に含む。また、プローブハウジング40Aは、プローブ50の角度又は針先端52Aの角度を間接的に検査するように構成されるセンサ45を含む。本実施形態例においては、プローブハウジング40Aは、針52又はプローブ50(所望の実施形態に依存する)を回転させるモータ42と、針又はプローブの回転角を検査するセンサ43とをさらに含む。ハウジング40Aは、回路及びプロセッサを含む回路基板44も有する。回路及びプロセッサは、プローブハウジング内の種々のモータを制御して、所望のプローブ位置(角回転及び/又は角変位)又は針先端52Aの角位置を生成する。関連実施形態においては、基板44は、光凝固術器システムコントローラと通信するように構成される。電気コード・ケーブル48は、一端でハウジング40Aに結合し、他端でレーザ20に動作可能に結合する。電気コード・ケーブルは、プローブ先端位置の移動について、角度及び回転についての同期を確立する。本実施形態例においては、長手方向の移動により、針先端52Aにどの位の角度があるかが制御される。針先端52Aの角度変更は、網膜内に作り出される円の大きさに直接的に対応し、種々の照準光パターンの形成に役立つ。関連実施形態においては、プローブホルダ及びモータは、プローブ及び針の長手方向の移動若しくは変位(又は、ホルダへの出入)を制御する。
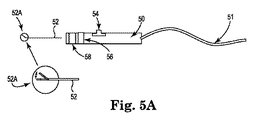
図5A及び図5Bを参照する。図5A及び図5Bは、本発明の実施形態に従う、眼内のプローブ50の二つの実施形態例である。図5Aにおいて、プローブ50はファイバ51に結合し、ファイバ51はレーザ20に光学的に、及び/又は電気的に結合する。ボタンアクチュエータ54がここに含まれ、ボタンアクチュエータ54は、プローブ50に動作可能に結合して、次の一つ又はそれ以上のことを促進する。(ハウジング40Aの内外で)プローブ40Aの長さに沿った円筒40B内での長手方向の械的押し/引き又は移動/変換や、回転移動に伴う、眼内用プローブの種々の角度でのプローブ本体又は針先端52Aの移動許容能力がある。ボタン・アクチュエータ54は、装置センサ43が眼内用プローブ先端角を検証又は決定できるようにも構成され得る。プローブ50上に位置する変位部材56は、装置センサ43が角回転の観点から眼内用プローブ及び針の位置のそれぞれを判定することができるように構成する。プローブ50上に位置する角回転部材58は、プローブホルダを固定、又は保持するように(機械的又はその他方法で)構成されて、プローブ50又は針52の角回転を許容する。挿入図は、アクチュエータ54に応じる針先端52Aの(種々な角度での)移動を図示する。
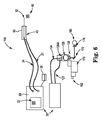
図6を参照する。本明細書で教示するようにスリットランプ式の眼科学的治療を提供するように構成した要素を除き、システム10と類似するいくつかの要素を有する、別のマルチスポット外科的レーザシステム100を提供する。本実施形態例においては、電気コード121及び光学ファイバ124がレーザ源20に結合し、ファイバ先端124Aは、他端で装置に結合し、モータ(図示せず)及び位置センサを用いた変換/変位移動及び先端の回転を許容する。さらに、そのような装置は、固定のスポットサイズ変更器126に結合されている。スポットサイズ変更器126もフォーカスレンズ128に結合される。患者の眼180は、スリットランプ170を用いてユーザ182により、診断および治療される。スリットランプ170は、コンタクトマイクロマニピュレータ172を有する鏡を制御することができる。鏡は、先端124Aからの光を、コンタクトレンズ174を通して患者の眼180に向けて反射する。当業者にとって既知の修正をシステム100に施し得る。これにより、種々のパターンを、網膜及び角膜を含む患者の眼に照射し、治療する。図2Aから図2Gに図示するパターンは、システム10及びシステム100によって生成されるが、ユーザに対してディスプレイ22内で表示可能であるため、正しい治療パターンが用いられていること、そうでない場合には、調整がなされ得ることを確保する。
上述した教示は、スリットランプシステムにも適用可能である。ここでのスリットランプシステムでは、本明細書で記載したファイバ又はプローブとは対照的なレーザビームを編位させる又は動かすスキャナを用いることなく、ファイバの回転及び変換移動によって、整列及び治療パターンを形成し得る。また、ズームをスポットサイズの整列のために必要とせず、たった一つの固定のスポットサイズ又は数個の固定のスポットサイズを用いることができ、本発明を用いた標準的なパターンを形成して、治療対象の区画又は領域を埋める。
眼科学的診断及び治療システムに関する次の特許及び公報は、それら全ての内容がここに参照として援用されるとともに、本明細書における開示内容の一部を構成する。米国特許第6,096,028号、米国特許第8,496,331号及び米国特許出願公報第2011/0144627号並びに国際公開2008/024848号である。
本明細書で規定する、前述した発明の特定実施形態は、説明することのみを目的とする。種々の差異(deviations)及び修正を、本発明のメインテーマから逸脱することなく、本発明の精神及び範囲内で行ってよい。
Claims (18)
- システムコントローラと、照準光及び治療光を生成するレーザ源とを含む光凝固術のシステムであって、当該システムは、
遠位端と近位端を有するプローブであって、該近位端は前記レーザ源に結合される光ファイバケーブルに結合し、該プローブの該遠位端は眼科学的処置用に構成され、長手部分と該長手部分の端に角度のついた先端を有するように構成される、プローブを含み、
前記プローブの遠位端は、角回転するように構成されて、そこに位置するスポットの整列パターン及び/又は治療パターンを形成する複数のスポットを有する少なくとも一つの円周を描く、システム。 - 前記プローブの先端は、固定又は可変のいずれか一方で構成可能な方向角を含む針先端を含む、請求項1に記載のシステム。
- 前記プローブの遠位端は、複数のスポットを用いて複数の同心円を描くように構成されて、所望の整列及び治療パターンを形成する、請求項2に記載のシステム。
- 前記プローブを保持するように構成され、前記システムコントローラと動作可能に通信するように構成されるプローブホルダをさらに含む、請求項3に記載のシステム。
- 前記プローブホルダは、
前記プローブの長手方向の変位のための変位用モータと、
前記プローブの変位用センサと、
前記変位用モータと前記変位用センサとに動作可能に結合し、前記システムコントローラと通信するように構成される制御回路部材と、をさらに含み、
前記変位用モータは、前記プローブに動作可能に結合するアクチュエータと係合し、前記プローブの長手方向での変位を制御するように構成され、
前記変位用センサは、前記プローブ上に位置する変位部材を感知するように構成され、前記プローブの変位移動を伝えるように構成される、請求項4に記載のシステム。 - 前記プローブホルダは、
前記プローブの角回転のための角回転用モータと、
前記プローブの角回転用センサと、
前記角回転用モータと前記角回転用センサとに動作可能に結合し、前記システムコントローラと通信するように構成される制御回路部材と、をさらに含み、
前記角回転用モータは、前記プローブに動作可能に結合するアクチュエータと係合し、前記プローブの角回転又は変位を制御するように構成され、
前記角回転用センサは、前記プローブ上に位置する角回転部材を感知するように構成され、前記プローブの角回転移動を伝えるように構成される、請求項4又は5に記載のシステム。 - 前記プローブは、針と針先端とを含み、
前記針及び前記針先端は、前記アクチュエータ、前記変位用モータ及び前記角回転用モータの少なくとも一つに対して応答する、請求項5又は6に記載のシステム。 - 前記照準光は前記プローブホルダ内で生成される、請求項4に記載のシステム。
- 前記変位用モータ及び前記角回転用モータは、前記プローブの変位及び回転移動と同様のものを提供する、機械コンポーネント及びバネから構成される、請求項5又は6に記載のシステム。
- 前記プローブは、ある角度で脇にレーザ光をそらす、前記遠位端にある光学要素を含む、請求項1、3、5又は6に記載のシステム。
- 前記プローブは、ある角度で脇にレーザ光をそらす、前記遠位端にある特定の切欠き又は形状を含む、請求項1、3、5又は6に記載のシステム。
- 前記プローブは、前記遠位端に集光要素又はボールレンズを含む、請求項1、3、5又は6に記載のシステム。
- 前記プローブは、照明ファイバ、テーパ端を有するファイバ及びコーティング若しくは処置された端又は形状が付与された端を有するファイバのうち、少なくとも一つを含む、請求項1、3、5又は6に記載のシステム。
- 前記プローブは、前記プローブの先端で、幾何学的関係で配される複数の光学ファイバを含む、請求項1、3、5又は6に記載のシステム。
- 前記プローブは、前記遠位端にて、整列及び/又は治療光を、複数の光線に分割する回折光学素子を含む光学用を含む、請求項1、3、5又は6に記載のシステム。
- ハウジングと、
眼内用のプローブの長手方向の変位のための変位用モータと、
前記プローブの変位用センサと、
前記変位用モータ及び前記変位用センサに動作可能に結合し、前記変位用モータ及び前記変位用センサを制御するように構成される制御回路部材と、を含み、
前記変位用モータは、前記プローブに動作可能に結合するアクチュエータと係合し、長手方向の移動を通じて、前記プローブの角変位を制御するように構成され、
前記変位用センサは、前記プローブ上に位置する変位部材を感知するように構成され、前記プローブ又はプローブ先端の角変位移動を前記制御回路部材に伝えるように構成される、眼内用のプローブホルダアセンブリ。 - 前記プローブホルダアセンブリは、
前記プローブの角回転のための角回転用モータと、
前記プローブの角回転用センサと、
前記角回転用モータ及び前記角回転用センサに動作可能に結合し、前記角回転用モータ及び前記角回転用センサを制御するように構成される制御回路部材と、を含み、
前記角回転用モータは、前記プローブに動作可能に結合するアクチュエータと係合し、前記プローブの角回転又は変位を制御するように構成され、
前記角回転用センサは、前記プローブ上に位置する角回転部材を感知するように構成され、前記プローブの角回転移動を前記制御回路部材に伝えるように構成される、請求項16に記載のプローブホルダアセンブリ。 - 前記プローブは、針と針先端とを含み、
前記針及び前記針先端は、前記アクチュエータ、前記変位用モータ及び前記角回転用モータの少なくとも一つに対して応答する、請求項16又は17に記載のプローブホルダアセンブリ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361920202P | 2013-12-23 | 2013-12-23 | |
| US61/920,202 | 2013-12-23 | ||
| PCT/EP2014/078986 WO2015097150A2 (en) | 2013-12-23 | 2014-12-22 | System and device for multi spot photocoagulation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017501817A true JP2017501817A (ja) | 2017-01-19 |
Family
ID=52232194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016543145A Pending JP2017501817A (ja) | 2013-12-23 | 2014-12-22 | マルチスポット光凝固術のためのシステム及び装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10463540B2 (ja) |
| EP (1) | EP3086744B1 (ja) |
| JP (1) | JP2017501817A (ja) |
| CA (1) | CA2934944A1 (ja) |
| WO (1) | WO2015097150A2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8945103B2 (en) | 2007-10-30 | 2015-02-03 | Iridex Corporation | Contact probe for the delivery of laser energy |
| US10463540B2 (en) | 2013-12-23 | 2019-11-05 | Quantel Medical, Inc. | System and device for multi spot photocoagulation |
| WO2017100839A1 (en) * | 2015-12-14 | 2017-06-22 | Ellex Medical Pty Ltd | Pattern laser |
| EP3156014A1 (en) * | 2016-09-30 | 2017-04-19 | Melek Mehmet | Pattern scanning ophthalmic endolaser probe system |
| US10369049B1 (en) | 2018-08-17 | 2019-08-06 | Iridex Corporation | Probes having fiber taper and fluid collection channel for ophthalmic laser treatment |
| US11653896B2 (en) * | 2018-08-21 | 2023-05-23 | Siemens Healthcare Gmbh | Active steering for intracardiac echocardiography catheters |
| CN109303638B (zh) * | 2018-12-05 | 2021-08-27 | 王娟 | 一种眼科手术超声刀 |
| US12465522B2 (en) | 2020-12-07 | 2025-11-11 | Iridex Corporation | Methods and probes for intrascleral laser surgery |
| US11336975B1 (en) | 2021-02-01 | 2022-05-17 | Shure Acquisition Holdings, Inc. | Wearable device with detune-resilient antenna |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3984174A (en) | 1975-04-28 | 1976-10-05 | International Telephone And Telegraph Corporation | Fiber optic connector with transparent cable sleeve |
| GB1556046A (en) | 1975-07-09 | 1979-11-21 | Elliott Bros | Optical-fibre cables |
| WO1993014430A1 (en) * | 1992-01-17 | 1993-07-22 | Trimedyne, Inc. | Method and apparatus for transmitting laser radiation |
| US5921981A (en) | 1995-11-09 | 1999-07-13 | Alcon Laboratories, Inc. | Multi-spot laser surgery |
| US5746738A (en) | 1996-11-20 | 1998-05-05 | Cleary & Oxford Associates | Laser surgical device |
| US7618177B2 (en) | 2005-04-29 | 2009-11-17 | Alcon, Inc. | Multi-fiber variable intensity wide-angle illuminator |
| US20070027509A1 (en) * | 2005-07-29 | 2007-02-01 | Eisenberg Elliot S | Automated panretinal laser photocoagulation |
| WO2007076533A2 (en) | 2005-12-29 | 2007-07-05 | Caro Nicholas C | Ophthalmic clip and associated surgical method |
| US10098781B2 (en) * | 2006-03-24 | 2018-10-16 | Topcon Medical Laser Systems Inc. | Multi-spot optical fiber endophotocoagulation probe |
| JP5001363B2 (ja) * | 2006-07-04 | 2012-08-15 | ブラッコ イメージング ソチエタ ペル アチオニ | 熱により局所的に腫瘍性組織のような生物組織を焼灼させる焼灼装置 |
| WO2008024848A2 (en) | 2006-08-22 | 2008-02-28 | Synergetics, Inc. | Multiple target laser probe |
| US8317778B2 (en) * | 2007-02-01 | 2012-11-27 | Spaide Richard F | Steerable and flexibly curved probes |
| US7566173B2 (en) | 2007-07-09 | 2009-07-28 | Alcon, Inc. | Multi-spot ophthalmic laser probe |
| US8721631B2 (en) * | 2009-09-24 | 2014-05-13 | Biolite Pharma Marketing Ltd | Twister fiber optic systems and their use in medical applications |
| ES2552799T3 (es) | 2009-11-24 | 2015-12-02 | Alcon Research, Ltd. | Sonda láser multipunto de una sola fibra para endoiluminación oftálmica |
| CN102655906B (zh) | 2009-12-15 | 2015-03-25 | 爱尔康研究有限公司 | 多点激光探针 |
| US8496331B2 (en) | 2011-08-12 | 2013-07-30 | Alcon Research, Ltd. | Portable pattern-generating ophthalmic probe |
| CN103997948B (zh) | 2011-10-19 | 2016-06-01 | 艾里德克斯公司 | 栅格图案激光治疗及方法 |
| US20130144278A1 (en) * | 2011-12-06 | 2013-06-06 | Michael Papac | Devices and Methods for Multispot Scanning |
| US10463540B2 (en) | 2013-12-23 | 2019-11-05 | Quantel Medical, Inc. | System and device for multi spot photocoagulation |
-
2014
- 2014-12-22 US US15/107,376 patent/US10463540B2/en active Active
- 2014-12-22 WO PCT/EP2014/078986 patent/WO2015097150A2/en not_active Ceased
- 2014-12-22 JP JP2016543145A patent/JP2017501817A/ja active Pending
- 2014-12-22 EP EP14820867.1A patent/EP3086744B1/en active Active
- 2014-12-22 CA CA2934944A patent/CA2934944A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CA2934944A1 (en) | 2015-07-02 |
| US10463540B2 (en) | 2019-11-05 |
| WO2015097150A3 (en) | 2015-09-17 |
| WO2015097150A2 (en) | 2015-07-02 |
| EP3086744A2 (en) | 2016-11-02 |
| EP3086744B1 (en) | 2018-07-04 |
| US20170000648A1 (en) | 2017-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017501817A (ja) | マルチスポット光凝固術のためのシステム及び装置 | |
| CN109963535B (zh) | 集成式眼科手术系统 | |
| JP5066094B2 (ja) | 虚像照準装置を使った光学医療治療システム及び方法 | |
| JP5563488B2 (ja) | 眼の観察、検査、診断および/または治療のための眼科機器および方法 | |
| CN103327875B (zh) | 用于光学相干断层成像、照射或光凝固术的组合外科内探测器 | |
| JP5886866B2 (ja) | 共通の光源を使用する光コヒーレンストモグラフィ及び照明 | |
| JP6306796B2 (ja) | 可動広角眼科手術システム | |
| CA3011108C (en) | Apparatus, system and method for providing laser steering and focusing for incision, excision and ablation of tissue in minimally-invasive surgery | |
| JP5902105B2 (ja) | 眼内治療を目的とした干渉ファイバー管束システムおよびその方法 | |
| JP7449587B2 (ja) | 自動レーザ虹彩切開術 | |
| US20170172802A1 (en) | Devices and methods for multispot scanning | |
| JP2017519564A (ja) | 可視レーザ・ダイオードを使用する診断及び外科手術用レーザ装置 | |
| US20080015553A1 (en) | Steering laser treatment system and method of use | |
| CN101578074A (zh) | 利用目标组织可视化和束传输间固定关系的动态光学手术系统 | |
| KR20140023446A (ko) | 눈 수술 장치 및 방법 | |
| US7275829B2 (en) | Ophthalmic laser irradiation apparatus | |
| JP2002325789A (ja) | 眼科用レーザ治療装置 | |
| CN205698218U (zh) | 多点扫描光凝仪 | |
| CN110198692A (zh) | 具有反射镜和安全联锁装置的治疗激光器 | |
| AU2013231978A1 (en) | Apparatus, system and method for providing laser steering and focusing for incision, excision and ablation of tissue in minimally-invasive surgery | |
| FI123423B (fi) | Laitteisto silmän hoitamiseksi lasersäteen avulla | |
| JP2015033504A (ja) | 癌治療装置、癌治療装置の表示画像の画像位置補正方法 | |
| JP2023127543A (ja) | 治療光照射ユニット、治療光照射装置および内視鏡 | |
| JP2022505600A (ja) | 位置決め装置、位置決め装置を有する光プロセッサ、および光プロセッサを用いたレーザー眼科手術のための方法 | |
| KR102221915B1 (ko) | 안저 카메라용 외부 주시 램프 |