JP2017504494A - ロボット制御 - Google Patents
ロボット制御 Download PDFInfo
- Publication number
- JP2017504494A JP2017504494A JP2016549349A JP2016549349A JP2017504494A JP 2017504494 A JP2017504494 A JP 2017504494A JP 2016549349 A JP2016549349 A JP 2016549349A JP 2016549349 A JP2016549349 A JP 2016549349A JP 2017504494 A JP2017504494 A JP 2017504494A
- Authority
- JP
- Japan
- Prior art keywords
- point
- snap
- robot
- reference point
- points
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/409—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by using manual data input [MDI] or by using control panel, e.g. controlling functions with the panel; characterised by control panel details or by setting parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/02—Hand grip control means
- B25J13/025—Hand grip control means comprising haptic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/36—Nc in input of data, input key till input tape
- G05B2219/36433—Position assisted teaching
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37396—Tactile feedback, operator feels reaction, force reflection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39439—Joystick, handle, lever controls manipulator directly, manually by operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45118—Endoscopic, laparoscopic manipulator
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
Abstract
Description
a)ロボットの基準点にとって到達可能な複数の滞在点の作業空間内で、少なくとも1つのスナップ点を定めるステップと、
b)操作要素の操作の量を検出するステップと、
c)前記操作の量が切り替え閾値を下回る場合に、現下の滞在点に隣接するスナップ点に前記基準点を移動させるステップと、
d)前記操作の量が切り換え閾値を上回る場合に、前記基準点を連続的に移動させるステップと、
を含む。
2 アーム要素
3 アーム要素
4 ベース要素
5 関節
6 関節
7 関節
8 器具
9 エンドエフェクタ
10 関節
11 関節軸線
12 入力機器
12’ 入力機器
13 操作要素
13’ 操作要素
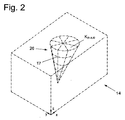
14 作業空間
15 長手軸線
16 滞在点
17 スナップ点
18 距離
19 制御ユニット
22 矢印
23 円錐
24 滞在点
25 スナップ空間
26 格子
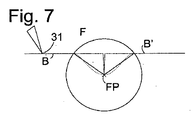
27 球体
28 球体
Claims (20)
- ロボット(1)を制御する方法であって、前記方法は、
a)前記ロボット(1)の基準点(31)にとって到達可能な複数の滞在点の作業空間(14)内で、少なくとも1つのスナップ点(17)を定めるステップ(S1)と、
b)操作要素(13)の操作(d)の量(|d|)を検出するステップと、
c)前記操作の量(|d|)が切り替え閾値(Th2)を下回る(S3)場合に、現下の滞在点に隣接するスナップ点(17)に前記基準点(31)を移動させるステップ(S5)と、
d)前記操作の量(|d|)が、前記切り換え閾値(Th2)を上回る場合に、前記基準点(31)を連続的に移動させるステップ(S6〜S8)と、
を含んでいる、
ことを特徴とする方法。 - 前記ステップc)において、前記基準点(31)の移動を、前記隣接するスナップ点(17)に到達した場合に、少なくとも一時的に停止させる、
請求項1記載の方法。 - 前記操作の量(|d|)が応答閾値(Th1)を上回る場合にのみ、前記ステップc)およびd)を実施させる、
請求項1または2記載の方法。 - 前記ステップb)において、ベクトル量(d)を測定し、ベクトルの絶対値(|d|)を、前記操作の量として想定する、
請求項1から3いずれか1項記載の方法。 - 前記ステップc)およびd)において、前記基準点(31)を、前記検出されたベクトル(d)の方向に対応する空間方向に移動させる、
請求項4記載の方法。 - 前記ベクトル量(d)は、前記操作要素(13,13’)の静止位置からの変位であるか、または、前記操作要素(13,13’)に加えられた力である、
請求項4または5記載の方法。 - 前記ステップd)において、前記基準点(31)は、前記操作の量(|d|)が大きければ大きいほど、より速く移動する、
請求項1から6いずれか1項記載の方法。 - 操作が終了し、かつ、前記基準点(31)がスナップ点(17)に存在しない場合に、前記基準点(31)を、隣接するスナップ点(17)に移動させる、
請求項1から7いずれか1項記載の方法。 - 前記操作の量(|d|)が前記切り換え閾値(Th2)を下回って低下した場合に、操作の終了が検出される、
請求項8記載の方法。 - 前記操作の量(|d|)が前記応答閾値(Th1)を下回って低下した場合に、操作の終了が検出される、
請求項3を引用する請求項8記載の方法。 - 前記ステップa)において、周期的な格子(26)の複数の点を、スナップ点(17)として定める、
請求項1から10いずれか1項記載の方法。 - 前記作業空間(14)の少なくとも一部に、複数のセル(Κ(x、y、z))からなる周期的な格子を定め、前記複数のセルの各々が、1つ以上のスナップ点(17)の同一の配置構成を、好ましくは前記セルの角に含んでいる、
請求項1から11いずれか1項記載の方法。 - 前記ロボット(1)は、1つの滞在点において、少なくとも1つの活動を実施するように構成されており、前記活動が実施された滞在点は、スナップ点(17)として定められる、
請求項1から12いずれか1項記載の方法。 - 前記基準点(31)の移動は、記録される、
請求項1から13いずれか1項記載の方法。 - 前記隣接するスナップ点(17)は、現下の滞在点(24,24’)を中心とした空間領域(28,28’)内で検索される、
請求項1から14いずれか1項記載の方法。 - 前記隣接するスナップ点は、その縁部に現下の滞在点(24,(0,0,0))が存在する空間領域(23,27)内で検索される、
請求項1から15いずれか1項記載の方法。 - 前記空間領域(27)は、現下の滞在点(24,(0,0,0))を越えて直前の移動方向に延在する、
請求項16記載の方法。 - 前記空間領域(28’)がスナップ点を何も含まない場合に、前記隣接するスナップ点への前記基準点(31)の移動を中断する、
請求項15から17いずれか1項記載の方法。 - ロボット(1)と、請求項1から18いずれか1項記載の方法に従って前記ロボット(1)の移動を制御する制御ユニット(19)と、を備えたロボットシステム。
- コンピュータ上で実行されるときに、請求項1から18いずれか1項記載の方法を実施可能にする命令を含んだコンピュータプログラム製品。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014001168.2 | 2014-01-31 | ||
| DE102014001168.2A DE102014001168B4 (de) | 2014-01-31 | 2014-01-31 | Robotersteuerung |
| PCT/EP2015/000154 WO2015113757A1 (de) | 2014-01-31 | 2015-01-28 | Robotersteuerung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017504494A true JP2017504494A (ja) | 2017-02-09 |
| JP6622207B2 JP6622207B2 (ja) | 2019-12-18 |
Family
ID=52577812
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016549349A Expired - Fee Related JP6622207B2 (ja) | 2014-01-31 | 2015-01-28 | ロボットを制御する方法、当該方法に従ってロボットの移動を制御するためのロボットシステム、及び、当該方法を実施するためのコンピュータプログラム製品 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10579045B2 (ja) |
| JP (1) | JP6622207B2 (ja) |
| CN (1) | CN106068174B (ja) |
| DE (1) | DE102014001168B4 (ja) |
| WO (1) | WO2015113757A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018532608A (ja) * | 2015-11-04 | 2018-11-08 | フランカ エミカ ゲーエムベーハーFRANKA EMIKA GmbH | 位置および/または姿勢の離散手動入力の制御システムを備えるロボット |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015210218B4 (de) * | 2015-06-02 | 2024-11-07 | Kuka Deutschland Gmbh | Verfahren zum Betreiben eines Roboters, zugehöriger Roboter mit einer Vibrationsvorrichtung und Roboterarbeitsplatz |
| DE102015017220B3 (de) | 2015-08-14 | 2021-09-16 | Franka Emika Gmbh | Robotersystem |
| DE102015012961B4 (de) * | 2015-10-08 | 2022-05-05 | Kastanienbaum GmbH | Robotersystem |
| DE102015012959B4 (de) | 2015-10-08 | 2019-01-17 | Franka Emika Gmbh | Robotersystem und Verfahren zur Steuerung eines Robotersystems |
| DE102015012962B4 (de) * | 2015-10-08 | 2024-08-22 | Franka Emika Gmbh | Robotersystem |
| WO2017097377A1 (en) * | 2015-12-11 | 2017-06-15 | Abb Schweiz Ag | An industrial robot and a method for controlling the robot to automatically select which program code to be executed next |
| DE102016004787B4 (de) | 2016-04-20 | 2023-02-02 | Franka Emika Gmbh | Antriebsvorrichtung für einen Roboter und Verfahren zu ihrer Herstellung |
| DE102016004788A1 (de) | 2016-04-20 | 2017-10-26 | Kastanienbaum GmbH | Verfahren zur Herstellung eines Roboters und Vorrichtung zur Durchführung dieses Verfahrens |
| WO2018013214A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Automatic manipulator assembly deployment for draping |
| US10427305B2 (en) * | 2016-07-21 | 2019-10-01 | Autodesk, Inc. | Robotic camera control via motion capture |
| EP3582934B1 (en) * | 2017-02-17 | 2021-11-10 | ABB Schweiz AG | A method for controlling an industrial robot during lead-through programming of the robot and an industrial robot |
| EP3662352A1 (de) * | 2017-07-31 | 2020-06-10 | Kaba Ag | Industriebedienpanel |
| DE102019220619B3 (de) * | 2019-12-30 | 2021-01-28 | Kuka Deutschland Gmbh | Bewegen einer roboterfesten Referenz |
| DE102020103269B4 (de) | 2020-02-10 | 2024-11-07 | J. Schmalz Gmbh | Handhabungsroboter |
| DE102020206568B4 (de) | 2020-05-26 | 2022-01-13 | Dr. Doll Engineering Gmbh | Programmiersystem zum handgeführten Programmieren einer Bewegung eines Industrieroboters, Industrieroboter mit einem solchen Programmiersystem und Verfahren zum handgeführten Programmieren einer Bewegung eines Industrieroboters |
| US11911919B2 (en) | 2021-03-05 | 2024-02-27 | Mujin, Inc. | Method and computing system for performing grip region detection |
| CN113359792B (zh) * | 2021-05-27 | 2024-09-20 | 深圳市优必选科技股份有限公司 | 一种双足机器人控制方法、装置、双足机器人及存储介质 |
| JP2023004015A (ja) * | 2021-06-25 | 2023-01-17 | セイコーエプソン株式会社 | プログラム作成装置、プログラムおよびロボット動作プログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6049756A (en) * | 1997-11-12 | 2000-04-11 | Lockheed Martin Corporation | System and method for avoiding collision between vector and solid objects |
| US20090076652A1 (en) * | 2007-09-19 | 2009-03-19 | Disney Enterprises, Inc | Smooth clipping of data streams |
| EP2131257A1 (de) * | 2008-06-06 | 2009-12-09 | KUKA Roboter GmbH | Verfahren und Vorrichtung zum Steuern eines Manipulators |
| JP2013188840A (ja) * | 2012-03-14 | 2013-09-26 | Toyota Motor Corp | 作業支援装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0850730B1 (en) | 1995-09-14 | 2002-07-24 | Kabushiki Kaisha Yaskawa Denki | Teaching unit for robots |
| US7706919B2 (en) * | 2001-09-07 | 2010-04-27 | Kabushiki Kaisha Yaskawa Denki | Wafer position teaching method and teaching jig |
| DE102008062622B9 (de) | 2008-12-17 | 2016-08-25 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zur Befehlseingabe in eine Steuerung eines Manipulators |
| CN101559601A (zh) * | 2009-04-28 | 2009-10-21 | 广州亚陆控制系统有限公司 | 机械手控制方法和系统 |
| AT509927B1 (de) | 2010-06-08 | 2015-05-15 | Keba Ag | Verfahren zum programmieren oder vorgeben von bewegungen oder abläufen eines industrieroboters |
| JP5118220B2 (ja) * | 2011-02-16 | 2013-01-16 | 株式会社スクウェア・エニックス | 動作モデリング装置及び方法、並びにプログラム |
| AT12208U3 (de) | 2011-09-06 | 2013-07-15 | Keba Ag | Verfahren, steuerungssystem und bewegungsvorgabemittel zum programmieren oder vorgeben von bewegungen oder abläufen eines industrieroboters |
| KR20140110685A (ko) * | 2013-03-08 | 2014-09-17 | 삼성전자주식회사 | 싱글 포트 수술 로봇의 제어 방법 |
-
2014
- 2014-01-31 DE DE102014001168.2A patent/DE102014001168B4/de active Active
-
2015
- 2015-01-28 JP JP2016549349A patent/JP6622207B2/ja not_active Expired - Fee Related
- 2015-01-28 WO PCT/EP2015/000154 patent/WO2015113757A1/de not_active Ceased
- 2015-01-28 US US15/115,427 patent/US10579045B2/en active Active
- 2015-01-28 CN CN201580006153.XA patent/CN106068174B/zh not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6049756A (en) * | 1997-11-12 | 2000-04-11 | Lockheed Martin Corporation | System and method for avoiding collision between vector and solid objects |
| US20090076652A1 (en) * | 2007-09-19 | 2009-03-19 | Disney Enterprises, Inc | Smooth clipping of data streams |
| EP2131257A1 (de) * | 2008-06-06 | 2009-12-09 | KUKA Roboter GmbH | Verfahren und Vorrichtung zum Steuern eines Manipulators |
| JP2013188840A (ja) * | 2012-03-14 | 2013-09-26 | Toyota Motor Corp | 作業支援装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018532608A (ja) * | 2015-11-04 | 2018-11-08 | フランカ エミカ ゲーエムベーハーFRANKA EMIKA GmbH | 位置および/または姿勢の離散手動入力の制御システムを備えるロボット |
| US10994415B2 (en) | 2015-11-04 | 2021-05-04 | Franka Emika Gmbh | Robot with control system for discrete manual input of positions and/or poses |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6622207B2 (ja) | 2019-12-18 |
| US20170160721A1 (en) | 2017-06-08 |
| WO2015113757A1 (de) | 2015-08-06 |
| DE102014001168B4 (de) | 2019-03-14 |
| US10579045B2 (en) | 2020-03-03 |
| DE102014001168A1 (de) | 2015-08-06 |
| CN106068174B (zh) | 2019-06-04 |
| CN106068174A (zh) | 2016-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6622207B2 (ja) | ロボットを制御する方法、当該方法に従ってロボットの移動を制御するためのロボットシステム、及び、当該方法を実施するためのコンピュータプログラム製品 | |
| US12293068B2 (en) | Robotic floor-cleaning system manager | |
| US10870199B2 (en) | Robot system and robot teaching method | |
| US10105843B2 (en) | Robot device, remote control method of robot device, and program | |
| US10514687B2 (en) | Hybrid training with collaborative and conventional robots | |
| WO2015149360A1 (en) | Portable apparatus for controlling robot and method thereof | |
| JP2005305644A (ja) | 多軸ハンドリング機器を操縦する方法および装置 | |
| KR101876615B1 (ko) | 로봇을 제어하기 위한 방법 및 장치 | |
| JP2019518616A (ja) | 1または複数の協働ロボットの運動を制御するための方法およびデバイス | |
| CN111655105A (zh) | 借助自主式移动机器人进行的地板处理 | |
| KR20200074144A (ko) | 로보틱 시스템 | |
| KR101838791B1 (ko) | 처음에 미리 정해져 있는 로봇경로의 변경 | |
| Andersen et al. | Intuitive task programming of stud welding robots for ship construction | |
| JP6737765B2 (ja) | ロボット教示システム、制御装置およびハンドガイドユニット | |
| JP2014217901A (ja) | ロボットシステム | |
| US20160318185A1 (en) | Device for dynamic switching of robot control points | |
| JP6007873B2 (ja) | ロボット及びその制御方法 | |
| CN108369413B (zh) | 工业机器人和用于控制机器人自动选择接下来要执行的程序代码的方法 | |
| KR20180114837A (ko) | 로봇의 이동 속도 제어 장치 및 방법 | |
| JP6332128B2 (ja) | 物体認識装置、及び物体認識方法 | |
| JP2012081577A (ja) | ロボットの移動方向決定方法及びロボットの制御装置 | |
| JP6373649B2 (ja) | 位置計測装置及び位置計測方法 | |
| JPH08229859A (ja) | マスタスレーブマニピュレータの制御装置 | |
| JP2015217477A (ja) | 操作入力装置、およびロボットシステム | |
| KR20250169577A (ko) | 자율 로봇 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170927 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20181004 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181010 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190107 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190405 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191121 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6622207 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |