JP2017506530A - 医療注入器用万能アダプタと注射器識別システム - Google Patents
医療注入器用万能アダプタと注射器識別システム Download PDFInfo
- Publication number
- JP2017506530A JP2017506530A JP2016548372A JP2016548372A JP2017506530A JP 2017506530 A JP2017506530 A JP 2017506530A JP 2016548372 A JP2016548372 A JP 2016548372A JP 2016548372 A JP2016548372 A JP 2016548372A JP 2017506530 A JP2017506530 A JP 2017506530A
- Authority
- JP
- Japan
- Prior art keywords
- syringe
- adapter
- injector
- universal adapter
- block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/007—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests for contrast media
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/145—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons
- A61M5/1452—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons pressurised by means of pistons
- A61M5/14546—Front-loading type injectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/16831—Monitoring, detecting, signalling or eliminating infusion flow anomalies
- A61M5/1684—Monitoring, detecting, signalling or eliminating infusion flow anomalies by detecting the amount of infusate remaining, e.g. signalling end of infusion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/19—Syringes having more than one chamber, e.g. including a manifold coupling two parallelly aligned syringes through separate channels to a common discharge assembly
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/3129—Syringe barrels
- A61M5/3134—Syringe barrels characterised by constructional features of the distal end, i.e. end closest to the tip of the needle cannula
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31511—Piston or piston-rod constructions, e.g. connection of piston with piston-rod
- A61M5/31515—Connection of piston with piston rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/10—Tube connectors; Tube couplings
- A61M2039/1077—Adapters, e.g. couplings adapting a connector to one or several other connectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/332—Force measuring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3331—Pressure; Flow
- A61M2205/3334—Measuring or controlling the flow rate
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3379—Masses, volumes, levels of fluids in reservoirs, flow rates
- A61M2205/3389—Continuous level detection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/60—General characteristics of the apparatus with identification means
- A61M2205/6018—General characteristics of the apparatus with identification means providing set-up signals for the apparatus configuration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/60—General characteristics of the apparatus with identification means
- A61M2205/6063—Optical identification systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/60—General characteristics of the apparatus with identification means
- A61M2205/6063—Optical identification systems
- A61M2205/6072—Bar codes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2209/00—Ancillary equipment
- A61M2209/08—Supports for equipment
- A61M2209/084—Supporting bases, stands for equipment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/16831—Monitoring, detecting, signalling or eliminating infusion flow anomalies
- A61M5/1684—Monitoring, detecting, signalling or eliminating infusion flow anomalies by detecting the amount of infusate remaining, e.g. signalling end of infusion
- A61M5/1685—Monitoring, detecting, signalling or eliminating infusion flow anomalies by detecting the amount of infusate remaining, e.g. signalling end of infusion by detection of position of a floating member
Landscapes
- Health & Medical Sciences (AREA)
- Vascular Medicine (AREA)
- Engineering & Computer Science (AREA)
- Anesthesiology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Hematology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
Abstract
注射器を注入器へ接続するための万能アダプタが提供される。注射器を注入器へ接続するための万能アダプタは、注入器へ接続するように構成された近端部を有する本体と、本体へ接続されるとともに内方向に付勢される少なくとも1つの半径方向支持体と、アダプタの遠端部に向かって軸方向に前記注射器を配置するように付勢される少なくとも1つの軸方向支持体とを含む。少なくとも1つの半径方向支持体は、注射器の筒の一部と接触および係合するように配置された切欠きを画定する。注射器を注入器へ接続するための万能アダプタを含む流体配送システムと注射器識別システムもまた本明細書において説明される。
Description
関連出願の相互参照
本出願は、2014年2月28日出願の米国仮特許出願第61/946,421号明細書からの優先権を主張し、その開示の全体を参照により本明細書に援用する。
本出願は、2014年2月28日出願の米国仮特許出願第61/946,421号明細書からの優先権を主張し、その開示の全体を参照により本明細書に援用する。
本開示は、一般的には医療注入器の分野に関し、具体的には、医療注入器用万能アダプタと、同万能アダプタに含まれる注射器の物理的寸法と他の物理的パラメータを識別するためのシステムとに関する。
多くの医療診断および治療手順では、医師などの開業医が患者に流体を注射する。近年、造影剤(しばしば、単に「コントラスト」と呼ばれる)などの流体の加圧注入のための多くの注入器作動式注射器(injector−actuated syringe)および電動注入器が血管造影法、コンピュータ断層撮影、超音波およびNMR/MRIなどの手順における使用のために開発されてきた。通常、これらの電動注入器は事前設定量のコントラストを事前設定流速および圧力で配送するように設計される。
血管造影法は、血管内の異常または制約の検出および処理に使用される。血管造影法手順では、カテーテルを介し注入されるX線造影剤を使用することにより血管構造物のX線写真像が得られる。コントラストが注入される静脈または動脈と流体接続する血管構造物がコントラストで充填される。関心領域を通るX線はコントラストにより吸収され、コントラストを含む血管のX線写真外形または像を生じる。結果画像は例えばビデオモニター上に表示され、記録され得る。
典型的な血管造影手順では、開業医は静脈または動脈中に心臓カテーテルを入れる。カテーテルは手動または自動コントラスト注入機構のいずれかへ接続される。典型的な手動コントラスト注入機構は、カテーテル接続と流体接続する注射器を含む。流体経路はまた、例えば、コントラストの源と洗浄流体(通常は生理食塩水)の源とを含む。手動コントラスト注入機構のオペレータは、生理食塩水またはコントラストを注射器中に吸い込ませ、カテーテル接続を介し患者に注入するように注射器を制御する。
自動コントラスト注入機構は通常、例えば電動線形アクチュエータを有する電動注入器へ接続された注射器を含む。線形アクチュエータは、注射器の可動プランジャと接触および係合するように構成されたプランジャロッドを作動する。通常、注射器の流体内容物が流速、流量および圧力制御下で正確に分注され得るやり方で、注射器を注入器の線形アクチュエータに従って正しく搭載するためにアダプタ構造が使用される。現在利用可能な流体配送システムでは、オペレータは、特定手順に使用される注射器の別のアダプタの中から特定アダプタを選択する。異なるサイズの注射器が後の手順で必要とされれば、オペレータは使用中のアダプタを取り外し、新しい注射器の大きさの新しいアダプタと交換しなければならない。アダプタを交換する工程は、効率を低下し、いくつかの注入手順に必要な時間を増加する。
注射器が正しいサイズのアダプタ内に挿入されると、オペレータは、流体配送圧力および量を制御する設定を電動注入器の電子制御システムに入力する。いくつかのシステムでは、オペレータと電動注入器間には注入を開始または停止するためのものを除いていかなる対話型制御も存在しない。このようなシステムにおける流速の変化は、機械を停止して注入パラメータを手動でリセットすることにより発生する。電動注入器を制御するための自動システムも知られている。電動注入器を使用する血管造影手順の自動化は、例えば本出願の譲受人に委譲された特許文献1、特許文献2、および特許文献3に論述されている。しかし、このような自動システムは、電動注入器へ接続される注射器のタイプをユーザまたはオペレータが識別することを依然として必要とし得る。注射器識別は、線形アクチュエータの線形ピストン進行およびその生成力を流量および圧力などの流体配送パラメータへ正確に変換するために必要とされる。このような注射器識別は通常、様々な幾何学形状および物理的寸法、様々な筒/プランジャ特徴、様々な材料特性および構造的強度、および様々な圧力限界を有し得る事前充填済み注射器からのコントラスト流体配送の安全かつ正確な制御を支援するために必要である。したがって、自動電動注入器ですらオペレータからの重要な入力および情報を必要とする。
様々なサイズの注射器用の電動注入器を構成する際の困難性を考えると、様々な幾何学形状およびタイプの注射器と共に使用され得るアダプタの必要性がある。さらに、注入器設定が新しい注射器タイプ毎に容易にかつ自動的に調整され得るように、注入器のアダプタと電子制御システムの一体化の必要性がある。システムは、必要に応じ、使用中の注射器のタイプを識別すべきであり、注入器設定に対し適切な変更を行うために当該情報を使用すべきである。本明細書で提供される万能アダプタおよび注射器識別システムはこれらの問題に対処するように構成される。
本開示の一態様によると、注射器を注入器へ接続するための万能アダプタは、注入器へ接続するように構成された近端部を有する本体と、本体へ接続されるとともに内方向に付勢される少なくとも1つの半径方向支持体と、アダプタの遠端部に向かう軸方向に注射器を配置するように付勢される少なくとも1つの軸方向支持体とを含む。少なくとも1つの半径方向支持体は、注射器の筒の一部と接触および係合するように配置された切欠きを画定する。
本開示の別の態様によると、注射器を注入器へ接続するための万能アダプタは、注入器へ接続するように構成された近端部を有する筐体を含む。筐体は、注射器を受け入れるように構成された空洞を画定する。アダプタはまた、空洞内に配置されるとともに内方向に付勢される少なくとも1つの半径方向支持体を含む。少なくとも1つの半径方向支持体は、注射器の長手軸と筐体の長手軸とをほぼ整合させるように構成される。アダプタはまた、空洞内に少なくとも部分的に配置されるとともに注射器をアダプタの遠端部方向に配置するように付勢される少なくとも1つの軸方向支持体を含み得る。半径方向支持体と軸方向支持体は、様々な寸法および幾何学形状の範囲全体にわたる注射器を受け入れるとともに同注射器にアライメントを提供するように構成される。
本開示の別の態様によると、流体配送システムは、流体を患者へ配送するための注射器であって、筒と同筒内に摺動自在に配置されたプランジャとを含む注射器と、線形アクチュエータを含む注入器と、注射器を受け入れるとともに注射器と注入器の線形アクチュエータとを整合させるように構成された万能アダプタとを含む。互いに接続されると、線形アクチュエータは流体を注射器から放出するためにプランジャを注射器筒中に進行させるように構成される。万能アダプタは、注入器へ接続するように構成された近端部を有する本体と、本体へ接続されるとともに内方向に付勢される少なくとも1つの半径方向支持体と、アダプタの遠端部に向かう軸方向に注射器を配置するように付勢される少なくとも1つの軸方向支持体とを含む。少なくとも1つの半径方向支持体は、注射器筒と接触および係合するように配置された切欠きを画定する。
本開示の別の態様によると、流体配送システムは、流体を患者へ配送するための注射器であって筒と同筒内に摺動自在に配置されたプランジャとを有する注射器と、線形アクチュエータを含む注入器と、注射器を受け入れるとともに注射器と注入器の線形アクチュエータとを整合させるように構成された万能アダプタとを含む。線形アクチュエータは流体を注射器から放出するためにプランジャを筒中に進行させ得る。万能アダプタは、注入器の線形アクチュエータへ接続するように構成された筐体であって、注射器を受け入れるように構成された空洞を画定する近端部を有する筐体と、空洞内に配置されるとともに内方向内に付勢された少なくとも1つの半径方向支持体であって、注射器の長手軸と筐体の長手軸とをほぼ整合するように構成された少なくとも1つの半径方向支持体と、空洞内に少なくとも部分的に配置されるとともに注射器をアダプタの遠端部方向に配置するように付勢される少なくとも1つの軸方向支持体とを含む。半径方向支持体と軸方向支持体は、様々な寸法および幾何学形状の範囲全体にわたる注射器を受け入れるとともに同注射器にアライメントを提供するように構成される。
本開示の別の態様によると、注射器識別システムは、患者へ注入するための医用流体を含む少なくとも1つの注射器と、注射器から流体を放出するように構成された線形アクチュエータを含む注入器と、注射器を受け入れるとともに注射器と注入器の線形アクチュエータとを整合させるための万能アダプタとを含む。万能アダプタは、注入器へ接続するように構成された近端部を有する本体と、本体へ接続されるとともに内方向に付勢される少なくとも1つの半径方向支持体と、アダプタの遠端部に向かう軸方向に注射器を配置するように付勢される少なくとも1つの軸方向支持体とを含む。少なくとも1つの半径方向支持体は、注射器の筒の一部と接触および係合するように配置された切欠きを画定する。注射器識別システムはまた、万能アダプタまたは注入器上に配置されたまたはそれに関連付けられた1つまたは複数のセンサを含む。センサは注射器の寸法および幾何学形状の測定結果を得るように構成される。1つまたは複数のセンサにより得られる測定結果は、注射器のタイプ、注射器流量、注射器流量特性またはそれらの任意の組み合せを識別するために使用される。
本開示の別の態様によると、注射器識別システムは、患者へ注入するための医用流体を含む少なくとも1つの注射器と、注射器から流体を放出するように構成された線形アクチュエータを含む注入器と、注射器を受け入れるとともに注射器と注入器の線形アクチュエータとを整合させるための万能アダプタとを含む。万能アダプタは、様々な寸法および幾何学形状の範囲全体にわたる注射器を受け入れるとともに同注射器にアライメントを提供するように構成される。注射器識別システムはまた、万能アダプタまたは注入器上に配置されたまたはそれに関連付けられたた1つまたは複数のセンサを含み得る。センサは注射器の寸法と幾何学形状の測定結果を得るように構成される。1つまたは複数のセンサにより得られる測定結果は、注射器のタイプ、注射器流量、注射器流量特性またはそれらの任意の組み合せを識別するために使用され得る。
万能アダプタおよび注射器識別システムのこれらおよび他の機構と特徴、構造の関連要素の動作の方法と機能、部品の組み合わせ、製造の経済性は、それらのすべてが本明細書の一部をなす添付図面を参照して以下の説明と添付の特許請求の範囲とを考察するとより明白になるだろう。ここで、同様な参照符号は様々な図の対応部品を示す。しかし、添付図面は例示と説明のためだけのものであり、本開示の限界の定義としては意図されていないというこが明確に理解される。本明細書と特許請求範囲において使用されるように、不定冠詞および定冠詞の単数形式は、文脈が明らかに規定しない限り複数の指示対象物を含む。
以下の説明の目的のために、空間的配向用語は、使用されれば、添付図面に配向されるように、そうでなければ以下の詳細な説明に記載するように参照実施形態に関係するものとする。特に、用語「近位」は、オペレータの手または電動注入器の駆動機構に最も近い注射器の端部を指す。用語「遠位」は、オペレータの手から最も離れた注射器の端部(流体が注射器から射出される)を指す。しかし、以下に説明する実施形態は多くの代替変形形態および実施形態を想定し得るということを理解すべきである。添付図面に示され本明細書において説明される特定の装置は単に例示的であって、制限と考えるべきでないということも理解すべきである。
同様な参照符号がいくつかの図にわたって同様な部品を指す添付図面を参照すると、1つまたは複数の医用流体を患者へ注入するための注入器が詳細に示される。
図1を参照すると、複数の注射器とインターフェースしそれを作動させるようにされた自動または電動注入器などの注入器10が示される。注射器は造影剤、生理食塩水または任意の所望医用流体で充填され得る。例えば、以下では生理食塩液注射器20と呼ばれる第1の注射器は生理食塩液で充填され得る。以下ではコントラスト注射器32(図3Aに示す)と呼ばれる第2の注射器は造影剤で充填され得る。電動注入器10は、患者の体中に造影剤と、生理食塩水などの一般的洗浄剤とを注入するために、血管造影手順中に使用され得る。電動注入器10は望ましくは、2つの流体配送注射器が並んで配向され、電動注入器10に関連付けられたそれぞれの線形アクチュエータまたはピストン要素により別個に作動される少なくとも1つのデュアル注射器注入器である。
注入器10は、医療グレードプラスチックなどの好適な構造材料で形成された筐体12内に密閉され得る。筐体12は所望用途に依存して様々な形状および寸法であり得る。例えば、注入器10は床上に置かれるように構成された自立構造であってもよいし、好適なテーブルまたはフレーム上の配置のための小さな設計物であってもよい。注入器10は、生理食塩水注射器20とコントラスト注射器32とをそれぞれの線形アクチュエータおよび/またはピストン要素へ接続するための注射器口を含む。以下では第1の注射器口14および第2の注射器口16と呼ばれる注射器口は筐体12の最上部側に配置される。図1に示すように、生理食塩水注射器20は第1の注射器口14へ直接接続される。コントラスト注射器32は、様々な形状および寸法の注射器を保持するように構成された万能アダプタ30により第2の注射器口16へ接続される。
注射器20、32は通常、ガラスまたは医療グレードプラスチックで形成された円筒状注射器筒22を有する。注射器筒22は開放近端部24とその遠端部28から延びるノズル26とを有する。開放近端部24は、注射器筒22の側壁に対する流体密封を形成することができる弾性プランジャ18により密閉され得る。プランジャ18は注射器筒22中を摺動するように構成される。
流体経路セット(図1に示さず)は、流体を注射器20、32から血管アクセスサイトにおいて患者内へ挿入するためのカテーテル(図示せず)へ配送する電動注入器10とインターフェースされ得る。生理食塩水注射器20からの生理食塩水とコントラスト注射器32からのコントラストの流れは、様々なバルブを制御する流体制御モジュール(図示せず)と、生理食塩水およびコントラストの患者への配送を造影剤と生理食塩水の注入流速、持続時間、合計注入容積および比などのユーザ選択注入パラメータに基づき調節する流量調整構造とにより調整され得る。好適な複数注射器注入器10は、米国特許出願公開第2012/0123257号明細書として公開され、本出願の譲受人へ委譲された2012年1月24日出願の米国特許出願第13/386,765号明細書に記載されており、その本開示を全体として参照により本明細書に援用する。他の関連複数流体配送システムは、本出願の譲受人へ委譲された2002年5月30日出願の米国特許出願第10/159,592号明細書(米国特許出願公開第2004/0064041号明細書として公開された)と2003年11月25日出願の米国特許出願第10/722,370号明細書(米国特許出願公開第2005/0113754号明細書として公開された)とに見出され、その両方の開示を参照により本明細書に援用する。
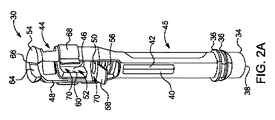
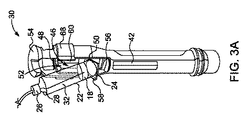
図1、図2A、図3Aを参照すると、万能アダプタ30の好適で非限定的実施形態が示される。万能アダプタ30は、事前指定制約条件に入る範囲の寸法および幾何学形状全体にわたる事前充填済み注射器を注入器10へ物理的に搭載するように構成される。万能アダプタ30は、コントラスト注射器32を注入器10の第2の注射器口16へ接続するように構成された近端部34を有するほぼ管状構造、筐体または本体を含む。アダプタ30は、注射器32が高圧注入中に正しく配置されるということを保証するための半径方向および軸方向制約を与える。加えて、アダプタ30は、機械的緩み関連誤差を最小化するとともに注入器動作制御のための絶対位置の基準を提供するためにアダプタ30内の注射器32の前方向付勢を与える。以下に説明するように、アダプタ30はまた、アダプタ30に搭載される注射器32の検出および識別を可能にし得る。アダプタ30はまた、正しくなく注射器32がアダプタ30へ搭載されるリスクをさらに低減するために注射器32のいくつかの二次的識別子を提供し得る。
万能アダプタ30は通常、2つの部分、すなわち近位駆動ロッド筐体部45と遠位注射器受け入れ部44とに分割される。アダプタ30の上記部分44、45(総称して、アダプタ筐体または本体と呼ばれる)は、互いに着脱可能であり得るまたは恒久的に互いに接続され得る。駆動ロッド筐体部45は可動駆動ロッド42を囲む。注射器口16との接続を容易にするために、駆動ロッド筐体部45は、アダプタ30の近端部34の周囲に延びる1つまたは複数の環状フランジ36などの1つまたは複数の固着構造を含み得る。アダプタ30の近端部34はまた、駆動ロッド42を注入器10の線形アクチュエータ(図示せず)へ接続するための開口38またはアパーチャを含む。注入手順中、線形アクチュエータは駆動ロッド42をプランジャ18の近端部方向に進ませて、駆動ロッド42をプランジャ18に係合させる。例えば、駆動ロッド42および/またはプランジャ18は、離脱可能な係合をその間に形成するために互いに嵌合する対応ロックまたはラッチ機構を含み得る。駆動ロッド42は窓40を通して見える。オペレータは、窓40を通して駆動ロッド42の位置を見ることにより注入の進行を判断し得る。
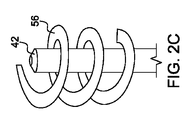
注射器受け入れ部44は、注射器32を受け入れるための空洞46を含む。空洞46は、アダプタ30の遠端部から注射器受け入れ部44に沿って延びるほぼ縦方向のスロット48を介しアクセス可能である。空洞46は、軸方向支持体またはベース50、多くの半径方向支持体または側方支持体52、および注射器32を所望位置に保持するためのアダプタ30の遠端部を覆うキャップ54を含む。ベース50は、バネ56へ結合された平坦面であり、バネ56の圧縮または伸張の結果として空洞46中を移動可能である。ベース50はスロット48を貫通するリップ58を含む。リップ58またはベース50の他の部分を押し下げることで、バネ56を圧縮して空洞46へのコントラスト注射器32の挿入を容易にする。下方圧力が解除されると、バネ56はベース50と注射器32とをアダプタ30に対し遠位方向に押し、これにより注射器32の遠端部28をキャップ54の内面に押し付け注射器32の軸方向の移動を制限する。駆動ロッド42はバネ56とベース50を貫通し空洞46に及ぶ。空洞46では、駆動ロッド42の遠端部は上に説明したようにプランジャ18の近端部と係合する。好適で非限定的実施形態では、図2Cに示すように、駆動ロッド42は螺旋バネ56の中心を通りプランジャ18(図2Cに図示せず)と接触する。
図1、図2A、図3Aを引き続き参照すると、好適で非限定的実施形態では、側方支持体52は、注射器筒22を押し付けるように構成された切欠きを画定するv字状内向き面(以下ではv字状ブロック60と呼ばれる)を有する対向ブロックである。v字状ブロック60は側方バネ62により空洞46中に内方向に付勢される。v字状ブロック60は注射器32を直立位置状態にし、したがって注射器32の長手軸はアダプタ30の長手軸と整合される。v字状ブロック60は様々な直径を有する注射器を保持するようにされる。特に、狭い注射器が使用される場合、側方バネ62はv字状ブロック60を空洞46中にさらに押して注射器筒22と接触させる。より広い直径を有する注射器では、v字状ブロック60は空洞46中まで延びない。ベースバネ56と側方バネ62は、核磁気共鳴撮像(MRI:magnetic resonance imaging)機に近接した使用に適合可能であり得る。例えば、バネ56、62は、MRI適合金属材料だけでなく形状記憶高分子または同様な弾性非金属性材料で形成され得る。
キャップ54は、アダプタ30の開放遠端部を覆う円形構造である。キャップ54は、注射器32のノズル26を受け入れるために取り外される楔状スロット64を含み得る。キャップ54はまた、ノズル26を直立位置状態で受け入れ保持する円状または湾曲開口66を、キャップ54の中心に含み得る。キャップ54の近位面はまた、注射器32の遠端部28の他の部分(注射器筒22の肩部または端部など)を支持するための追加保持構造を含み得る。
アダプタ30はさらに、アダプタ30の注射器受け入れ部44の一部を囲む半環状帯または輪で形成されたラッチ68を含む。開位置では、ラッチ68はスロット48を覆わない。コントラスト注射器32が空洞46中に装填されると、オペレータは、スロット48を覆うようにアダプタ30を中心におよびスロット48全体にわたってラッチ68を回転するまたはねじる。スロット48を覆うようにラッチ68を配置することで、オペレータが注入完了前に注入器10から時期尚早に注射器32を取り出さないことを保証する。
図1、図2A、図3Aを引き続き参照すると、アダプタ30は、ベース50および側方支持体52の位置に基づき注射器32の物理的寸法を測定する1つまたは複数のセンサ70を含み得る。センサ70は、ベース50および側方支持体52の変位を測定するための当該技術領域で知られているような任意の種類の圧力または光センサであり得る。または、圧力または負荷センサが、注射器32寸法を判断するためにバネ56、62の圧縮を測定するように構成され得る。別の実施形態では、センサ(図示せず)は、アダプタ30の駆動ロッド筐体45部分内に配置され得、駆動ロッド42の変位を測定するように構成され得る。注射器32に含まれる流体量と注射器32から患者へ放出された流体量についての情報は、センサにより得られる駆動ロッド42位置データに基づき判断され得る。注射器32の物理的寸法および駆動ロッド42位置についての情報は、特定手順に使用される注射器32のタイプを識別するために使用され得る。注射器32のタイプが識別されると、注射器流量、筒/プランジャ摩擦特性、圧力限界および最大または最小流速を含む追加物理的パラメータ情報が取得され得る。例えば、情報はコンピュータネットワークを介し中央データベースまたはコンピュータサーバから注入器10へダウンロードされ得る。注射器32についての物理的パラメータ情報は、注入器10の線形アクチュエータの好適な注入力、注入速度、および適切な電力レベルを判断するために使用され得る。
図3A〜3Cを参照して、次に、コントラスト注射器32をアダプタ30へ装填する工程について論述する。図3Aに示すように、コントラスト注射器32の近位開放端がベース50のリップ58へ押し付けられる。オペレータは、ベース50へ接続されたバネ56を圧縮するために、注射器32を押し下げ、これによりベース50を近位方向に移動させる。図3Bに示すように、ベース50が十分な量移動されると、オペレータは、注射器32を空洞46内へ摺動させ、空洞46中に延びるv字状ブロック60の切欠きを注射器32がほぼ直立位置になるまで押し付ける。図3Cに示すように、注射器32が所望位置となった後、オペレータは、注射器32がアダプタ30から除去されるのを防止するためにラッチ68をスロット48全体にわたって回転する。注射器32が適所に配置されると、注射器のサイズおよび能力を判断するためにセンサ70(図2Aに示す)が使用され得る。この情報が知られると、駆動ロッド42は、注入器線形アクチュエータにより、注射器プランジャ18に向かう遠位方向に進行され得る。駆動ロッド42の遠端部は、好適な接続をなすためにプランジャ18の近端部と接触および係合する。線形アクチュエータの連続的遠心移動は、駆動ロッド42およびそれに取り付けられたプランジャ18を注射器筒22中に進行させて注射器32からそのノズル26を通し流体を射出させる。
図4A〜4Cを参照して、万能アダプタ30の別の実施形態を示す。アダプタ30の側方支持体52は、可動セグメント74で構成された1つまたは複数の半環状支持体72を含む光彩軸方向固定機構(iris axial securing mechanism)である。セグメント74は、半環状支持体72の幅を増減するために協調されたやり方(カメラアパーチャの運動と同様なやり方)で径方向内向きまたは外向きに移動するように構成される。セグメント74は、セグメント74が注射器32の半径方向運動を制限するために注射器32を押し付けるように1つまたは複数のバネ(図示せず)により付勢され得る。図4Aに示すように、半環状支持体72は注射器保持空洞46の様々な領域に配置され得る。例えば、注射器32のノズル26と接触してそれを保持するために1つの半環状支持体72が空洞46の遠端部の近くに配置され得る。第2の半環状支持体72が空洞46の中間位置に配置され、より広い注射器筒22と接触するようにされ得る。前述の実施形態と同様に、アダプタ30は、セグメント74および半環状支持体72の位置を判断するように構成された1つまたは複数のセンサ70を含み得る。
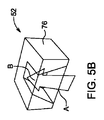
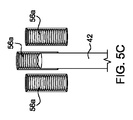
図5A〜5Cを参照すると、万能アダプタ30の別の実施形態が示される。アダプタ30は、キャップ54の近位面へ取り付けられたまたはそれと共に一体成形されたルアリードイン支持体76を含む。ルアリードイン支持体76は、幅Aのより広い近位開口と幅Bの狭い遠位開口とにより先細り空洞78を画定する。先細り空洞78は、アダプタ30のスロット48に対応するように配置された縦スロット80を介しアクセス可能である。先細り空洞78はコントラスト注射器32のノズル26を受け入れるようにされる。先細り形状の結果として、空洞78は、注射器32の半径方向と軸方向の両方の移動を制限する。図5A〜5Cに示されたアダプタ30の実施形態はまた、ベース50へ結合された複数の外部のバネ56aを含む。前の実施形態のバネ56の場合と同様に、外部バネ56aは力を空洞46のベース50に対して働かせる。ベース50は、注射器32を遠位方向に押して、筒注射器22のノズル26および遠位部をルアリードイン支持体76に接触させる。ベース50とルアリードイン支持体76により注射器32にかけられる圧力が注射器32の半径方向および軸方向アラインメントを維持する。
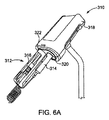
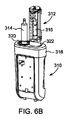
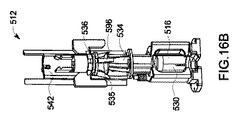
図6A、6Bを参照すると、流体注入器310と万能アダプタ312の別の実施形態が示される。前述の実施形態と同様に、注入器310は、生理食塩水注射器314および/またはコントラスト注射器316などの1つまたは複数の注射器と接続されそれから流体を放出するように構成される。注射器314、316は、注入器310の筐体318内に密閉された線形アクチュエータのそれぞれのピストン要素へ、生理食塩水注射器口320およびコントラスト注射器口322などの注射器口を介し結合される。注射器口320、322は筐体318の最上部側に配置される。いくつかの実施形態では、生理食塩水注射器314は生理食塩水注射器口320へ直接接続される。コントラスト注射器316は万能アダプタ312を介しコントラスト注射器口322へ接続される。万能アダプタ312は様々な幾何学形状および寸法の注射器を保持するように構成される。
図7A、7Bを参照すると、万能アダプタ312は、コントラスト注射器口322(図6Aと図6Bに示す)内に挿入するように構成された近端部324と、静脈注射管または針アセンブリ(図示せず)などの流体配送アセンブリと接続するように構成された遠端部326と、その間に延びる円筒状の側壁328とを有するほぼ管状の構造または筐体である。図7Bに示すように、アダプタ312は、注射器筒330、プランジャ332、および近端部336から注射器筒330まで延びるプランジャロッド334を含む完全組み立て済みコントラスト注射器316と共に装填されるように構成され。注射器筒330はまた、遠端部338から延びるノズル340を有する遠端部338を含む。
図7A、7Bを引き続き参照すると、アダプタ312はコントラスト注射器316を受け入れるための空洞342を含む。空洞342は、アダプタ312の長さを延長するほぼ長手方向開口344を介しアクセス可能である。空洞342は、注射器プランジャロッド334の近端部に位置する注射器フランジ335と接触するように構成されたアダプタ駆動部材アセンブリ356を含む。以下に論述されるように、空洞342は、少なくとも1つの側方支持体346と、アダプタ312の遠端部326を覆うロードプレート348に対して注射器316を保持するための前方向付勢機構358とを含み、これにより注射器316を所望位置(例えば、注入中の注射器316の半径方向および軸方向の移動を制限するための)に維持する。アダプタ空洞342は、ドア350(図8A〜8Eに示す)を長手方向開口344全体にわたって揺動することにより閉鎖され得る。ドア350は、注射器316がアダプタ312内に装填されたかどうかをユーザまたはオペレータが見えるように透明または半透明材料で形成され得る。加えて、コントラスト注射器口322との接続を容易にするために、いくつかの実施形態では、アダプタ312は注入器インターフェース構造352を含む。以下に説明するように、注入手順中、注入器310の線形アクチュエータにより駆動されるピストン354(図9A〜9Eに示す)は、アダプタ駆動部材アセンブリ356と接触しそれを注射器プランジャロッド334方向に進めるように構成される。
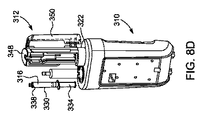
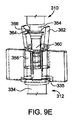
図8A〜8Eに示すように、オペレータは、万能アダプタ312を注入器310のコントラスト注射器口322内に挿入することにより注入工程を開始する。いくつかの実施形態では、オペレータは、アダプタ312をコントラスト注射器口322に押し込むことでインターフェース構造352を注射器口322内の対応取り付け構造(図示せず)と係合させる必要があり得る。図8Cに示すように、次に、オペレータはドア350を方向Aに揺動することによるなどしてドア350を開ける。図8D、8Eに示すように、次に、オペレータはコントラスト注射器316をアダプタ312内に挿入して、注射器筒330の遠端部338がアダプタ312のロードプレート348に押し付けられ、注射器316のプランジャロッド334が駆動部材アセンブリ356(図7A、7Bに示す)に隣接して配置されるようにする。次に、オペレータはドア350を閉じて、注入を開始するために注入器310を活性化し得る。
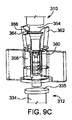
図9A〜9Eを参照して、注入器310の駆動部材アセンブリ356と線形アクチュエータまたはピストン354とのインターフェース構造352(図8Aに示す)について次に詳細に論述する。インターフェース構造は、注入器ピストン354によりアダプタ312に与えられた力を打ち消すためにアダプタ312に構造的支持を与えることを目的とする。インターフェース構造はまた、アダプタ312とピストン354との軸方向アライメントを維持する。いくつかの実施形態では、インターフェース構造は注入器310に対して独立した配向であり得る。したがって、インターフェース構造は、オペレータがアダプタ312を注射器口322内でいかなる特定のやり方で配向する必要も無く、ダプター312を注入器310へ接続するように構成され得る。
インターフェース構造は、ピストン354の一部と係合するように構成された駆動部材アセンブリ356の近端部から近位方向に延びるラッチ部材362を含み得る。ラッチ部材362は、確実な係合を生じるやり方でピストン354と相互作用するようにされた弾性脚または揺脚であり得る。ラッチ部材362とピストン354との確実な係合は、駆動部材アセンブリ356をピストン354の運動と共に進行(例えば遠位D)方向と退却(例えば近位P)方向の両方へ移動させる。いくつかの実施形態では、ラッチ部材362は、ピストン354の対応ショルダまたはリブ366を受け入れるように構成された溝364を含み得る。ラッチ部材364は、ピストン354が遠位方向Dにラッチ部材362に向かって進むと初期位置から外れ撓むように付勢され、次に初期位置へ戻りピストン354のリブ366を把持する。ピストン354の連続的遠心移動は、アダプタ駆動部材アセンブリ356を注射器プランジャロッド334の注射器フランジ335に接触させる。
より具体的には、使用中、線形アクチュエータまたはピストン354は図9Aに示すように遠位方向に進む。ピストン354の連続的遠心移動は、ピストン354のリブ366がラッチ部材362の近端部を越えて進むようにラッチ部材362を半径方向外向きに撓ませる。リブ366がラッチ部材362の近端部を通過すると、ラッチ部材362はその初期位置へ戻り、リブ366はラッチ部材362の溝364内に受け入れられる。この位置において、図9Cに示すように、線形アクチュエータピストン354は駆動部材アセンブリ356へドッキングされる。つまりピストン354の遠位先端360は駆動部材アセンブリ356に接する。ピストン354の連続的遠心移動は駆動部材アセンブリ356を進ませ、駆動部材アセンブリ356は次に注射器プランジャロッド334と接触しそれを進ませる。
いくつかの実施形態では、駆動部材アセンブリ356の遠位先端360または近端部は、ピストン354と駆動部材アセンブリ356との接触がいつ確立されたかを識別する圧力または接触センサなどのセンサ365を含み得る。センサ365は、ピストン354が駆動部材アセンブリ356の近位面と接触すると後退するバネ装架ピンセンサであり得る。
図10A〜10Dを参照して、注射器筒330の遠端部338を遠位方向Dにロードプレート348に押す付けるための軸方向358または前方向付勢機構358について次に詳細に論述する。前方付勢機構358は、アダプタ312の近端部324から遠端部326へ縦方向に延びる付勢部材368を含む。付勢部材368は、バネプランジャボールなどの付勢戻り止め369を介しアダプタ駆動部材アセンブリ356へ係合される。タブ370は付勢部材368の遠端部へ接続される。タブ370は、注射器筒330をロードプレート348へ押し付ける前方向付勢力を与えるために注射器筒330の近端部324を押し付けるように構成される。いくつかの実施形態では、タブ370は、様々なフランジおよびプランジャロッド寸法に対処するようにバネ装填される。
図10Aに示すように、その初期位置では、戻り止め369はアダプタ駆動部材アセンブリ356へ接続し、タブ370は注射器筒330の近端部336と接触しそれを押し付ける。注入器310のピストン354(図10Bに示すように)がアダプタ312を介し駆動部材アセンブリ356を進ませると、戻り止め369は駆動部材アセンブリ356から離れるように撓み、その間の係合を解除する。戻り止め369が駆動部材アセンブリ356から離れると、付勢部材368は静止したままタブ370に対する前方向付勢圧力を維持し、駆動部材アセンブリ356はアダプタ312中をさらに進み流体を注射器316から射出させる。
図10Bに示すように、注入が完了すると、駆動部材アセンブリ356の遠端部はタブ370と注射器筒330の近端部336とに隣接する。図10Cに示すように、注入が完了した後、ピストン354は近位方向に後退し、駆動部材アセンブリ356をアダプタ312の近端部方向に移動させる。駆動部材アセンブリ356が後退すると、タブ370は注射器フランジ335によりその初期位置から外れるように撓まされる。したがって、付勢部材368とタブ370は、注射器筒330より広い注射器フランジ335を有する注射器316と共に使用され得る。
図10Dを参照すると、駆動部材アセンブリ356のさらなる後退は、アセンブリ356を付勢部材368の近端部に位置する戻り止め369に近づかせる。駆動部材アセンブリ356は戻り止め369と接触および係合する。図10Dに示すように、駆動部材アセンブリ356と戻り止め369との係合が回復されると、付勢部材368は駆動部材アセンブリ356と共に近位方向に移動する。したがって、付勢部材368は最終的には、付勢部材368の遠端部がアダプタ312の近端部324に対して配置されたその初期位置へ戻る。この位置では、空の注射器316がアダプタ312から容易に取り出され得る。
注射器筒330をアダプタ312の前面ロードプレート348に対して付勢することにより、前方付勢機構358は、注射器零容積位置(例えば、すべての流体が注射器筒330から射出されたときの注入器ピストン354の位置)が正確に確立されるということを保証するのに役立つ。注射器零容積位置を正確に確立することは、流量測定結果が注入器ピストン354の絶対位置に基づき判断され得るということを意味する。注射器零容積位置を正確に確立することができなければ、このような容量測定結果は注入器ピストン354の位置に基づき判断され得、アダプタ312または注射器316内のどこかに配置されるいくつかの他の容積センサを使用することにより直接測定される必要がある。
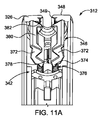
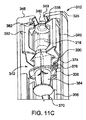
図11A〜11Cを参照して、アダプタ312の半径方向または側方支持体346の構造について次に詳細に論述する。前述の実施形態と同様に、側方支持体346は、注射器を受け入れるための切欠きを画定するv字状ブロック372であり得る。v字状ブロック372は注射器筒330の半径方向運動を制限するように構成される。「v字」形状は、様々な直径を有する注射器筒をブロック372が保持できるようにする。図11A〜11Cに示すアダプタ312は2つのv字状ブロック372と共に示されているが単一v字状ブロックだけを含むアダプタ312も構築され得るということに留意されたい。その場合、単一ブロック372または側方支持体346は、筐体の内部の突起またはパッド付き領域などの受け入れ面方向に注射器を付勢する。単一ブロック372と受け入れ面により注射器にかけられる圧力が注射器を所望アライメント状態に維持する。
いくつかの実施形態では、v字状ブロック372は、ヒンジ374においてアダプタ312へ接続され、ねじりばね376などの1つまたは複数の付勢部材により適切な位置に維持される。ねじりばね376は、v字状ブロック372がアダプタ312の開口またはスロットから離れるように撓ませるようにし、その結果、注射器筒330はアダプタ312内に挿入され得る。注射器筒330がアダプタ312内に挿入されると、ねじりばね376はv字状ブロック372を注射器筒330の一部分と接触するその初期位置へ戻す。いくつかの実施形態では、v字状ブロック372は、ブロック372が互いに開閉するということを保証するために歯車機構378(図11Aに示す)へ結合される。図11A〜11Cに示すように、v字状ブロック372はまた、アダプタ312の長手方向開口344(図1Aと図1Bに示す)と整合するとともにユーザが注射器筒330をアダプタ312の空洞342中に摺動させるのを支援する外方向張り出し部または外方屈曲部380を含み得る。
先に説明したように、ロードプレート348はアダプタ312の遠端部326に配置される。ロードプレート348は、注射器316のノズル340を受け入れるように構成されたアパーチャ349を含むほぼ平坦な面である。ロードプレート348はライザ382すなわち段差部を含み得る。ライザ382は、より短い注射器が使用される場合ですら注射器316が依然としてv字状ブロック372の近端部を越えて延びるように注射器筒330の遠端部338とロードプレート348間に空間または隙間を生成する。図11B、11Cに示すように、注射器筒330の近端部336がv字状ブロック372の近端部を越えて延びると、駆動部材アセンブリ356は注射器零容積位置まで進み得る。そうでなければ、注入が完了した後一定量の流体が注射器316中に残される。
図11A〜11Cを引き続き参照すると、使用中、オペレータは注射器筒330をv字状ブロック372の外方向屈曲部分380に押し付ける。注射器筒330を空洞342中に押し込むことで、v字状ブロック372を空洞342の長手軸から離れるように撓ませ、ユーザが注射器316を外方向屈曲部分380を越え空洞342中へ押し仕込めるようにする。注射器筒330が外方向屈曲部分380を越えて押されると、ねじりばね376はv字状ブロック372を駆動してそれらの初期位置へ戻す。この初期位置では、ブロック372は、注射器筒330が半径方向に移動するのを防止するために注射器筒330の少なくとも一部を囲む。この位置において、注射器筒330の遠端部338は、前方付勢機構358のタブ370により前面ロードプレート348に押し付けられる。空洞342内に挿入されて使用位置にある注射器316が図11Bに示される。この位置から、注入器(図11A〜11Bに図示せず)のピストン354は、流体を注射器316から射出するように注射器プランジャロッド334を進ませ得る。完了した射出位置の注射器が図11Cに示される。
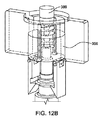
前述の実施形態と同様に、アダプタ312は、注射器316の物理的寸法を測定するためのセンサを含み得る。例えば、図12A、12Bを参照すると、アダプタ312は、v字状ブロック372の変位を測定するように構成された外径検出器384を含み得る。図12Aに示すように、外径検出器384はアダプタプランジャロッドアセンブリ356へ結合される。アダプタ駆動部材アセンブリ356がアダプタ312中を進むと、外径検出器384は、ブロック372の位置を測定するためにv字状ブロック372の面取り表面などの外面と接触する。v字状ブロック372内に挿入される注射器筒330の直径が大きければ大きいほど、外径検出器384の当該部材は互いに押されより遠くに離される。接触センサまたは光センサなどのセンサ(図示せず)が検出器384の変位を測定するための外径検出器384に隣接して配置され得る。ブロック372を越えて延びる注射器筒330の近端部336の直径ではなくv字状ブロック372の位置を測定することにより検出器384は注射器筒または注射器フランジ335の近端部336が注射器筒330自体より広くても注射器筒直径を精密に測定することができるということに留意されたい。
接触または圧力センサなどのプランジャ検出器386もまた、アダプタ駆動部材アセンブリ356の遠端部上に配置され得る。いくつかの実施形態では、プランジャ検出器386は、駆動部材アセンブリ356が注射器316のプランジャロッド334に接触する位置を測定するように構成される。注射器筒330の長さを判断するために位置情報が使用され得る。注射器筒330の長さと直径が知られると、注射器筒330容積が推定され得る。プランジャ検出器386はまた、アダプタ空洞342内のアダプタ駆動部材アセンブリ356の位置を測定するために使用され得る。駆動部材アセンブリ356の位置は、注射器316から排出された流体の容積と、いつ駆動部材アセンブリ356が注射器316のすべての内容物を空にして注射器が零容積位置になったかとを判断するために使用され得る。いくつかの実施形態では、アダプタ312は外径検出器384を有さないプランジャ検出器386だけを含み得る。
別の実施形態では、図13A、13Bを参照すると、アダプタ312はv字状ブロック372の変位を直接測定するための少なくとも1つの光センサ388を含み得る。光センサ388は、v字状ブロック372の外向き面方向に発射放射線を導くための発光体390を含み得る。光センサ388はまた、v字状ブロック372の位置を判断するために、発射放射線の伝搬距離を測定するための光検知器392を含む。いくつかの実施形態では、発光体390により発せられた放射線をv字状ブロック372へそしてブロック372から光検知器392へ搬送するためにファイバ光ケーブル394を使用し得る。例えば、光ファイバケーブル394は1つまたは複数の光パイプの形式であり得る。光パイプはアダプタ312の筐体中に射出成形され得る。
図14A、14Bを参照すると、生理食塩アダプタ412aとコントラストアダプタ412bなどの2つのアダプタを有する流体注入器410の実施形態が示される。注入器410は、コントラスト注射器414と生理食塩水注射器416などの2つの注射器を受け入れるように構成された2つの注射器口420、422を有する。前述の実施形態と同様に、アダプタ412a、412bは様々なサイズとタイプの注射器が注入器に取り付けられるように使用される。デュアルアダプタ注入器410を使用することで、ユーザが様々な形状とサイズの生理食塩水注射器414およびコントラスト注射器416を使用できるようにする。アダプタ412a、412bは、アダプタ内に挿入された注射器の特定タイプの注入器410設定を修正または最適化するために注射器414、416の物理的寸法と他の物理的パラメータとを判断するためのセンサを含み得る。
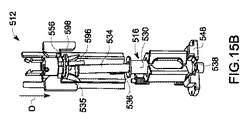
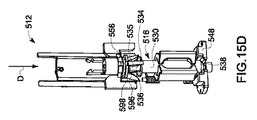
図15A〜15Dを参照すると、アダプタ512の別の実施形態が示される。アダプタ512は、事前充填済み注射器などの注射器516のプランジャロッド534と接触しそれを進めるための駆動部材アセンブリ556を含む。注射器プランジャロッド534は注射器筒530の近端部536から延びる。アダプタ512の前述の実施形態と同様に、注射器516はアダプタ512の遠位部内に受け入れられ、したがって、注射器516の遠端部538はアダプタ512のロードプレート548に押し付けられる。アダプタ駆動部材アセンブリ556は注射器プランジャロッド534の近端部に位置する注射器フランジ535と接触するように前進する。駆動部材アセンブリ556の遠位方向Dの連続的運動が、プランジャまたはストッパを注射器筒330中を進ませて流体をそれから排出させる。
図15A〜15Dを引き続き参照すると、駆動部材アセンブリ556は、注射器プランジャロッド534の近端部上のフランジ535と接触および係合するように構成された1つまたは複数の弾性または枢動フィンガ596を含む。フィンガ596は、様々な形状と直径を有する注射器プランジャロッド534の注射器フランジ535を受け入れるために半径方向外向きに枢動するまたは撓むことができる。フィンガ596はゴムバンド598により付勢され、したがってフィンガ596はプランジャロッド534を注射器筒530と同心的に配向するために注射器フランジ535を押すことができる。
使用中、図15Aに示すように、注射器プランジャロッド534は当初、注射器筒530と位置ずれしているかもしれない。図15Bに示すように、アダプタ駆動部材アセンブリ556は注射器516方向に進み、アダプタ駆動部材アセンブリ556のフィンガ596の少なくとも1つを注射器フランジ535に接触させる。ゴムバンド598は、注射器フランジ535をアダプタ駆動部材アセンブリ556に対して正しく配向するためにフィンガ596を付勢して注射器フランジ535に押し付ける。アダプタ駆動部材アセンブリ556の連続的進行は、注射器フランジ535がアダプタ駆動部材アセンブリ556の遠端部にぴったりくっつくようにフィンガ596を半径方向外向きに広がらせるまたは変形させる。いくつかの実施形態では、アダプタ512は、アダプタ512により受け入れられ得る最も大きな注射器筒530および注射器フランジ535の直径より広くフィンガ596が外に撓むように構成される。したがって、フィンガ596は、アダプタ512の内側側壁と接触することなくまたはそれにより制限されることなく、一意的でありかつより大きな幾何学形状を有するフランジ535周囲に撓むまたはそれを把持するのに十分なクリアランスを有する。
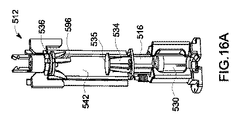
図16A〜16Dを参照すると、アダプタ駆動部材アセンブリ556はまた、アダプタ512の空洞542中を近位方向に付勢部材368(図10A〜10Dに示す)を後退させるために使用され得る。図16Aに示すように、アダプタ駆動部材アセンブリ556は、零容積位置にある注射器516のフランジ535方向に移動する。この零容積位置では、注射器フランジ535は、後退された注射器プランジャロッド534のいかなる位置ずれも明らかに最小となるのでアライメントを必要としない。図面16B、16Cに示すように、アダプタ駆動部材アセンブリ556が注射器フランジ535方向に移動すると、フィンガ596は外方に広がり、アダプタ駆動部材アセンブリ556が注射器フランジ535と接触できるようにする。
流体注入器および万能アダプタの構造と使用方法について説明したので、アダプタ内に挿入された注射器を識別するためのシステムについて次に詳細に論述する。本システムは、注入に使用される注射器のタイプ、および任意選択的にその中に含まれる流体を識別する。以下に説明するように、注射器識別システムは、注射器を注入器へ接続すること以外にオペレータによるいかなる追加活動も必要としない完全自動システム、またはオペレータが注射器を走査または試験することを必要とする半自動プロセス、またはオペレータが注射器を識別し識別情報をシステムへ手動で入力することを必要とする手動システムであり得る。
図17A〜17Cを参照すると、万能アダプタ130内の注射器132を識別するための自動システム100aが示される。自動システム100aは、事前充填済みコントラスト注射器132、生理食塩水注射器120、投与管133、および電動注入器110の万能アダプタ130を含む。注入器110は、生理食塩水注射器120を受け入れるための第1の口114とコントラスト注射器132を受け入れるための万能アダプタ130とを含む。図17A〜17Cの実施形態では、万能アダプタ130は注入前後に注入器110へ取り付けたままである半恒久アダプタである。アダプタ130および/または注入器110は、コントラスト注射器132の物理的特性を識別するための複数のセンサ170で形成された内蔵センサアレイ182を含む。例えば、上に説明したように、センサアレイ182は注射器の物理的寸法を測定し得る。任意選択的に、センサアレイ182はまた、注射器132についての追加情報を得るために注射器132上のラベル、バーコードまたは同様なタグを読み取り得る。
図17Bに示すように、生理食塩水注射器120および事前充填済みコントラスト注射器132は、以下では準備室210と呼ばれる薬準備室内の注入のために取得および準備される。準備室210では、生理食塩水が容器から生理食塩水注射器120中へ移される。事前充填済みコントラスト注射器132は製品包装212から取り出され、必要に応じ注射器プランジャロッド214がそれに固定される。次に、注射器120、132は投与管216へ接続される。次に、注射器120、132および接続された投与管216は、患者への投与のために準備室210からMRI室218へ運ばれる。MRI室218は図17Cに示される。MRI室218において、生理食塩水注射器120は注入器110の第1の口114へ取り付けられる。コントラスト注射器132は、第2の口116へ取り付けられた半恒久万能アダプタ130内に装填される。注射器120、132が注入器110内に装填されると、センサアレイ182は、物理的寸法およびその他の物理的パラメータを識別するためにコントラスト注射器132を走査する。センサアレイ182は、注射器132の物理的寸法を測定することにより注射器132のタイプを識別する1つまたは複数の光学および/または圧力センサを含む。上に説明したように、注射器タイプが判断されると、注射器についての追加パラメータが取得され得る。例えば、筒/プランジャ摩擦特性、圧力限界、および最大または最小流速を含む物理的パラメータが、コンピュータネットワークを介しアクセス可能な電子的データベースから注入器110へダウンロードされ得る。
注射器132の幾何学的寸法を判断するための追加センサもまた使用され得る。例えば、アダプタ130は、注射器幾何学形状を判断するために線形物理的寸法、角度寸法または歪/屈曲測定結果を判断するために注射器筒の一部分を測定するように構成されたセンサを含み得る。超音波、光学、または画像センサもまた使用され得る。加えて、アダプタ130は、注射器132幾何学形状が変形可能または可動部材のベッド中に圧入される「針のむしろ(bed of nails)」配置を含み得る。部材の変位は注射器幾何学形状を判断するために測定される。または、注射器幾何学形状を判断するために流体変位測定結果または注入器位置測定結果も使用され得る。
システム100aのいくつかの実施形態では、アダプタ130は、オペレータが注入器110設定を手動で調整し得るように、注射器タイプおよび他の物理的パラメータを準備室210内に配置された制御装置へ伝達し得る。システム100aはまた、得られた情報に基づき注入器110設定を自動的に調整するように構成され得る。例えば、注射器サイズ、流量または流体タイプが、行われる手順に対して正しくなければ、システム100aは差し迫った注入を取り消し、識別された矛盾に関してオペレータに警報を発し得る。注入力、持続時間または流体流速は、正しい流量が臨床的に適切な速度で患者へ配送されることを保証するように変更され得る。注射器タイプおよび流体内容物についての情報はまた、患者記録、医療設備の使い捨て装置在庫を更新するためにおよび他の事務的目的のために利用され得る。
図18A〜18Dを参照すると、万能アダプタ130内に挿入された注射器132のタイプを識別するための半自動システム100bの実施形態が示される。前述の自動システムと同様に、システム100bは、準備室210内で充填される生理食塩水注射器120、事前充填済みコントラスト注射器132、関連投与管216、および注入器110を含む。図18Aに示すように、注入器110は、生理食塩水注射器120用の第1の流体口114と万能アダプタ130を有する第2の流体口116とを含む。アダプタ130は、注射器受け入れ部144へ着脱可能に接続されたプランジャロッド筐体部145を有する2部アダプタアセンブリである。アダプタ130は、1つまたは複数のセンサ170からなる単純なセンサアレイ182を含む。前の実施形態と同様に、生理食塩水注射器120およびコントラスト注射器132が準備され、準備室210内の投与管216へ接続される。コントラスト注射器132は、準備室210内のアダプタ130の注射器受け入れ部144内に配置される。次に、注射器120、132および注射器受け入れ部144は準備室210からMRI室218へ運ばれる。MRI室218では、生理食塩水注射器120は第1の口114へ接続され、アダプタ130の注射器受け入れ部144は、注入器110へ恒久的または半恒久的に接続されたプランジャロッド筐体部145へ接続される。単純なセンサアレイ182はコントラスト注射器132についてのいくつかの特徴を検知し、一方単純なセンサアレイ182は注射器サイズおよびタイプを完全に識別するのに十分なデータを検知しない。その代りに、図18Dに示すように、システム100bは、単純なセンサアレイ182により収集された情報に基づきあり得る注射器のリストを識別する。オペレータは、準備室210へ戻り、パーソナルコンピュータ(PC)、タブレットPCまたはスマートフォンなどの電子装置224の画像表示226上のあり得る注射器のリストを見る。オペレータは、キーボード、マウス、タッチスクリーンまたはトラックパッドなどのコンピュータアクセサリを使用することにより正しい注射器を選択する。正しい注射器132が選択されると、オペレータは、注入工程を開始するために注入器110を活性化し得る。
図19A〜19Cを参照すると、注射器識別のための半自動システム100cの実施形態が描写される。システム100cは、生理食塩水注射器120、事前充填済みントラスト注射器132、投与管216、および注入器110を含む。注入器110は、生理食塩水注射器120用の第1の口114と、注射器受け入れ部144とプランジャロッド筐体部145からなる2部万能アダプタ130とを含む。システム100cはまた、コントラスト注射器132上に設けられたまたはそれに関連付けられた従来の1次元バーコード、2次元バーコード(例えばQRコード(登録商標)または同様な指標などのタグ222を走査するための携帯スキャナ220を含む。例えば、識別タグ222は、コントラスト注射器132の注射器筒122上に直接印刷されてもよいし、注射器筒122に固定されたラベルへ印刷されてもよい。識別タグ222はまた、注射器132の包装に取り付けられてもよいしそれに印刷されてもよい
使用中、生理食塩水注射器120とコントラスト注射器132は準備室210内で注入の準備がなされる。具体的には、オペレータは生理食塩水注射器120を生理食塩水で充填する。オペレータはコントラスト注射器132をその包装から取り出す。次に、オペレータは、投与管216を注射器120、132へ接続し、コントラスト注射器132をアダプタ130の注射器受け入れ部144に差し込む。次に、注射器120、132、注射器受け入れ部144および管216は、MRI室218へ運ばれる。MRI室218では、生理食塩水注射器120は第1の口114に接続され、アダプタ130の注射器受け入れ部144はプランジャロッド筐体部145へ接続される。次に、識別タグ222を読み取るために携帯スキャナ220が使用される。識別タグ222は、物理的寸法、流量特性、含まれる流体についての情報および他の関連情報を含む注射器132についての情報内に埋め込まれるまたはそれに関連付けられる。システム100cは、行われる手順に対し注射器132が正しいことを自動的に照査し得る。照査が完了すると、注入手順はシステム100cのオペレータにより自動または手動のいずれかで開始される。
図20A、20Bを参照すると、注射器識別システム100dの別の実施形態が示される。システム100dは図19A〜19Cのシステム100cと同じ要素を含む。しかし、システム100dでは、オペレータは、注射器132が注入器110へ接続された後というよりむしろ、準備室210内で識別タグ222を走査する。有利には、準備室210内の識別タグ222を走査することにより、注射器132は迅速に識別され、システム100dは行われる手順に対して注射器132が正しいことを保証する。特定手順に対して注射器132が適切ではないということが判断されれば、オペレータは準備室210内に格納された注射器から代替注射器132を容易に取得し得る。正しい注射器が得られ、アダプタ130の注射器受け入れ部144へ装填されると、前の実施形態と同様に、注射器120、132と投与管216は、注入器110へ装填するために準備室210からMRI室218へ運ばれる。注射器120、132が注入器110へ装填されると、注入手順は手動または自動的に開始される。
図21を参照すると、注射器受け入れ部144とプランジャロッド筐体部145とが一体成形された単一部品アダプタ130と携帯スキャナ220とを含むシステム100eが示される。前述の実施形態と同様に、オペレータはコントラスト注射器132をアダプタ130内に挿入する。次に、オペレータは、スキャナ220を使用することにより、注射器132または注射器包装212上に含まれる識別タグ222を走査する。オペレータは準備室(図21に示さず)内またはMRI室(図21に示さず)内のいずれかで識別タグ222を走査し得る。アダプタ130は準備室からMRI室へ運ばれる。MRI室では、注射器受け入れ部144とプランジャロッド筐体部145とを含むアダプタ130全体が注入器110の第2の口116へ接続される。
図22A〜22Cを参照すると、手動注射器識別のためのシステム100fが示される。システム100fは、注入器110と、生理食塩水注射器120と、コントラスト注射器132を含むアダプタ130とを含む。システム100fはさらに、画像表示226を含む電子装置224を含み、オペレータが、利用可能選択肢のリストから使用される注射器のタイプを選択できるようにする。電子装置224は、専用電子装置、パーソナルコンピュータ(PC)、タブレットPC、またはソフトウェアと使用される注射器のタイプを選択するためのユーザーインターフェースとを含むスマートフォンであり得る。電子装置224は、注入器110の設定を制御する他の制御システムと一体化されても良いし、それに接続されてもよい。前の実施形態と同様に、オペレータは、準備室210において生理食塩水注射器120とコントラスト注射器132を準備する。注射器120、132が準備されると、オペレータは、電子装置224を使用することにより注射器132についての情報を手動で入力する。システム100fは、注射器132とその中に含まれる流体とが、行われる手順に対して正しいということを確認する。注射器132が識別および確認されると、注射器120、132、アダプタ130と投与管216は、MRI室218へ運ばれ、注入器110へ装填される。次に、オペレータは前の実施形態において説明したように注入工程を開始する。
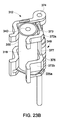
図23A〜23Cを参照すると、注射器316を正しいアライメントで保持するための半径方向または側方支持体346を有するアダプタ312の別の実施形態が示される。アダプタ312は、注射器筒の一部を受け入れるための切欠きを画定する2対の対向v字状ブロック372(すなわちv字状ブロックの上側対372aとv字状ブロックの下側追372b)を含む。
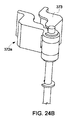
図24A〜24Dに示す上側対372aは、注射器316のノズル340の位置を特定するためのv字状ブロック372の最上部に位置するフランジ373を含む。図25A、25Bに示すv字状ブロックの下側対372bは、注射器316の雫フランジ335aを受け入れるためのスロット375を含む。図23A〜23Cを引き続き参照すると、v字状ブロックの各対372a、372bは、ブロック372が注射器316を受け入れるために半径方向外向きに枢動できるようにする軸またはヒンジ374へ取り付けられている。v字状ブロックの上側対372aはヒンジ374の最上部(例えば遠端部)へ接続され、ヒンジ374へ取り付けられた1つまたは複数の支持リングにより軸方向に移動することを妨げられる。ブロックの下側対372bは軸方向にヒンジ374に沿って摺動することができ、その結果、様々な長さの注射器316がアダプタ312内に挿入され得る。ブロックの下側対372bの遠位方向の進行を制限するために、スナップリングがヒンジ374に沿って配置され得る。ヒンジ374は、注射器筒330の少なくとも一部を囲む閉位置へv字状ブロック372を付勢するようにねじりばね376へ接続され得る。v字状ブロックの上側対372aと下側対372bはまた、ブロックの下側対372bから延びる舌がブロックの上側対372a内の溝内に挿入される舌および溝取り付け機構377を介し互に接続され得る。舌および溝機構377は、「v字状ブロック372が互いに開閉する」ということを保証する。したがって、注射器316が直立配向のブロック372内に挿入される尤度は効果的に増加される。
万能アダプタと注射器識別システムのいくつかの実施形態が添付図面に示され上に詳細に説明されたが、他の実施形態が本開示の範囲および精神から逸脱すること無しに当業者にとって明白となり容易になされる。例えば、本開示は「可能な範囲内で任意の実施形態の1つまたは複数の機構が任意の他の実施形態の1つまたは複数の機構と組み合わせら得る」ということを企図しているということを理解すべきである。したがって、これまでの説明は限定的であるというよりむしろ例示的であるように意図されている。
10 電動注入器
12 筐体
14 第1の注射器口
16 第2の注射器口
18 注射器プランジャ
20 注射器
22 注射器筒
24 開放近端部
26 ノズル
28 遠端部
30 万能アダプタ
32 コントラスト注射器
34 近端部
36 環状フランジ
38 開口
40 窓
42 可動駆動ロッド
45 駆動ロッド筐体部
46 注射器保持空洞
48 スロット
50 ベース
52 側方支持体
54 キャップ
56 バネ
58 リップ
60 v字状ブロック
62 側方バネ
64 楔状スロット
66 湾曲開口
68 ラッチ
70 センサ
72 半環状支持体
74 可動セグメント
76 ルアリードイン支持体
78 空洞
80 縦スロット
12 筐体
14 第1の注射器口
16 第2の注射器口
18 注射器プランジャ
20 注射器
22 注射器筒
24 開放近端部
26 ノズル
28 遠端部
30 万能アダプタ
32 コントラスト注射器
34 近端部
36 環状フランジ
38 開口
40 窓
42 可動駆動ロッド
45 駆動ロッド筐体部
46 注射器保持空洞
48 スロット
50 ベース
52 側方支持体
54 キャップ
56 バネ
58 リップ
60 v字状ブロック
62 側方バネ
64 楔状スロット
66 湾曲開口
68 ラッチ
70 センサ
72 半環状支持体
74 可動セグメント
76 ルアリードイン支持体
78 空洞
80 縦スロット
Claims (22)
- 注射器を注入器へ接続するための万能アダプタであって、
注入器へ接続するように構成された近端部を有する本体と、
前記本体へ接続されるとともに内方向に付勢された少なくとも1つの半径方向支持体であって、注射器の筒の一部分と接触および係合するように配置された切欠きを画定する、少なくとも1つの半径方向支持体と、
アダプタの遠端部に向かって軸方向に前記注射器を配置するように付勢された少なくとも1つの軸方向支持体とを含む万能アダプタ。 - 前記半径方向支持体と前記軸方向支持体は様々な寸法および幾何学形状の範囲全体にわたる注射器を受け入れるように構成される、請求項1に記載の万能アダプタ。
- 前記少なくとも1つの半径方向支持体は前記注射器の長手軸と前記本体の長手軸とを整合させるように構成される、請求項1に記載の万能アダプタ。
- 前記本体の近位部分内に密閉されたプランジャロッドであって、前記注射器のプランジャと係合するように遠位方向に移動可能なプランジャロッドをさらに含む請求項1に記載の万能アダプタ。
- 前記少なくとも1つの半径方向支持体はブロックを含み、
前記ブロックは前記本体の一部へ枢動可能に接続され、したがって、前記ブロックは、前記注射器がアダプタ内に挿入されると前記本体の一部を中心として第1の方向に回転し、前記第1の方向と反対の第2の方向に前記本体の一部を中心として回転するように付勢され前記注射器の前記筒と係合する、請求項1に記載の万能アダプタ。 - 前記ブロックは前記切欠きから離れた外方向張り出し面を含み、
前記ブロックは、前記外方向張り出し面と接触することで、前記ブロックを筐体の一部を中心として前記第1の方向に回転させるように配置される、請求項5に記載の万能アダプタ。 - 前記少なくとも1つの半径方向支持体は第1のブロックと第2のブロックとを含み、
前記第1のブロックと前記第2のブロックは前記本体の一部へ枢動可能に取り付けられ、
前記第1のブロックは前記本体の一部を中心として第1の方向に付勢され、前記第2のブロックは、前記本体の前記一部を中心として、前記第1の方向の反対の第2の方向に付勢される、請求項1に記載の万能アダプタ。 - 前記注射器はプランジャから近位方向に延びるプランジャロッドを含み、前記プランジャは前記注射器の筒に摺動自在に挿入される、請求項1に記載の万能アダプタ。
- 前記アダプタ内で移動可能な駆動アセンブリであって、前記注射器の前記プランジャロッドの一部と係合するとともに遠位方向に前記プランジャロッドを進めるように構成された駆動アセンブリをさらに含む請求項8に記載の万能アダプタ。
- 前記駆動アセンブリは、前記駆動アセンブリの一部へ枢動可能に接続されるとともに前記プランジャロッドの前記一部と係合するように内方向に付勢された複数のフィンガ部材を含む、請求項9に記載の万能アダプタ。
- 前記注入器の線形アクチュエータの一部と係合するように構成された注入器インターフェースであって、前記インターフェースの一部へ枢動可能に取り付けられ、前記線形アクチュエータの前記一部を把持するように内方向に付勢された複数の脚を含むインターフェースをさらに含む請求項1に記載の万能アダプタ。
- 前記アダプタ本体の遠位開口を覆う前方向ロードプレートであって、前記注射器の遠端部を受け入れるように構成された中央開口部を含むロードプレートをさらに含む請求項1に記載の万能アダプタ。
- 前記前方向ロードプレートは、前記中央開口部を囲む環状または部分的環状ライザであって、空洞の内部から前記ロードプレートの遠心面方向に延びる先細面を含むライザ含む、請求項12に記載の万能アダプタ。
- 前記軸方向支持体は、前記注射器の雫フランジを受け入れるためのブロックの少なくとも一部を貫通する半径方向または縦方向スロットを画定する少なくとも1つのブロックを含む、請求項1に記載の万能アダプタ。
- 流体を患者へ配送するための注射器であって、筒と同筒内に摺動自在に配置されたプランジャとを含む注射器と、
線形アクチュエータを含む注入器と、
前記注射器を受け入れるとともに前記注射器と前記注入器の線形アクチュエータとを整合させるように構成された万能アダプタであって、前記線形アクチュエータは流体を前記注射器から放出するために前記プランジャを前記筒の中に進行させ得、
前記注入器へ接続するように構成された近端部を有する本体と、
前記本体へ接続されるとともに内方向に付勢された少なくとも1つの半径方向支持体であって、前記注射器の筒と接触および係合するように配置された切欠きを画定する、少なくとも1つの半径方向支持体と、
アダプタの遠端部に向かって軸方向に前記注射器を配置するように付勢される少なくとも1つの軸方向支持体とを含む万能アダプタ、
を含む流体配送システム。 - 前記半径方向支持体と前記軸方向支持体は様々な寸法および幾何学形状の範囲全体にわたる注射器を受け入れるように構成される、請求項15に記載の万能アダプタ。
- 前記注射器は前記プランジャから近位方向に延びるプランジャロッドを含む、請求項15に記載の流体配送システム。
- 前記万能アダプタはさらに、前記アダプタの筐体内で移動可能な駆動アセンブリであって、前記プランジャロッドを遠位方向に進ませるために前記プランジャロッドの一部と係合するように構成された駆動アセンブリを含む、請求項17に記載の流体配送システム。
- 前記注入器の前記線形アクチュエータの一部と係合するように構成された注入器インターフェースであって、前記インターフェースの一部へ枢動可能に取り付けられ、前記線形アクチュエータの前記一部を把持するように内方向に付勢された複数の脚を含む、注入器インターフェースをさらに含む請求項15に記載の流体配送システム。
- 患者へ注入するための医用流体を含む少なくとも1つの注射器と、
前記注射器から流体を放出するように構成された線形アクチュエータを含む注入器と、
前記注射器を受け入れるとともに、前記注射器と前記注入器の前記線形アクチュエータとを整合させるための万能アダプタであって、
前記注入器へ接続するように構成された近端部を有する本体と、
前記本体へ接続されるとともに内方向に付勢された少なくとも1つの半径方向支持体であって、前記注射器の筒の一部と接触および係合するように配置された切欠きを画定する、少なくとも1つの半径方向支持体と、
アダプタの遠端部に向かって軸方向に前記注射器を配置するように付勢される少なくとも1つの軸方向支持体と、
を含む万能アダプタと、
前記万能アダプタまたは前記注入器上に配置されたまたはそれに関連付けられた1つまたは複数のセンサであって、前記注射器の寸法と幾何学形状の測定結果を得るように構成されるセンサと、
を含む注射器識別システムであって、
前記1つまたは複数のセンサにより得られた前記測定結果は、注射器のタイプ、注射器流量、注射器流量特性またはそれらの任意の組み合せを識別するために使用される、注射器識別システム。 - 前記少なくとも1つに注射器上に配置された識別タグであって、前記注射器についての識別情報を含むまたはそれに関連付けられた識別タグと、
前記識別タグを読み取ることにより前記識別情報を判断する検出器とをさらに含む請求項20の注射器識別システム。 - 前記識別タグは1次元バーコード、2次元バーコードまたは近接場通信装置を含む、請求項21の注射器識別システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461946421P | 2014-02-28 | 2014-02-28 | |
| US61/946,421 | 2014-02-28 | ||
| PCT/US2015/017650 WO2015130884A1 (en) | 2014-02-28 | 2015-02-26 | Universal adapter for a medical injector and syringe identification system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017506530A true JP2017506530A (ja) | 2017-03-09 |
Family
ID=54009602
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016548372A Pending JP2017506530A (ja) | 2014-02-28 | 2015-02-26 | 医療注入器用万能アダプタと注射器識別システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20170065763A1 (ja) |
| EP (1) | EP3110480A4 (ja) |
| JP (1) | JP2017506530A (ja) |
| KR (1) | KR20160125951A (ja) |
| WO (1) | WO2015130884A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020505144A (ja) * | 2017-01-24 | 2020-02-20 | バイエル・ヘルスケア・エルエルシーBayer HealthCare LLC | インジェクタシステムおよびそれと共に使用するためのシリンジアダプタ |
| JP2023513736A (ja) * | 2020-02-12 | 2023-04-03 | ベクトン・ディキンソン・アンド・カンパニー | デバイスコネクタに接続されているデバイスを識別するためのセンサアセンブリおよびシステム、方法、ならびに、コンピュータプログラム製品。 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9375180B2 (en) * | 2012-04-29 | 2016-06-28 | Acist Medical Systems, Inc. | Universal pressure transducer mounting device |
| CA2945603A1 (en) * | 2014-04-18 | 2015-10-22 | Becton, Dickinson And Company | Needle capture safety interlock for catheter |
| US10307528B2 (en) * | 2015-03-09 | 2019-06-04 | Medtronic Minimed, Inc. | Extensible infusion devices and related methods |
| US11596741B2 (en) * | 2018-04-19 | 2023-03-07 | Ethicon, Inc. | Adapter manifold for multi-barrel syringe applicator |
| AU2019273833B2 (en) | 2018-05-24 | 2022-03-24 | Novartis Ag | Automatic drug delivery device |
| KR102232838B1 (ko) | 2018-07-19 | 2021-03-26 | 제이에스케이바이오메드(주) | 약물 주입기용 어댑터 |
| AU2020257200A1 (en) | 2019-04-17 | 2021-12-16 | Icu Medical, Inc. | System for onboard electronic encoding of the contents and administration parameters of IV containers and the secure use and disposal thereof |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004358047A (ja) * | 2003-06-06 | 2004-12-24 | Nemoto Kyorindo:Kk | 薬液注入システム |
| JP2004357748A (ja) * | 2003-06-02 | 2004-12-24 | Nemoto Kyorindo:Kk | 薬液注入システム |
| WO2011102416A1 (ja) * | 2010-02-19 | 2011-08-25 | 株式会社 東芝 | 移動物体追跡システムおよび移動物体追跡方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2101140A (en) * | 1935-03-23 | 1937-12-07 | Raymond W Hege | Automatic injecting syringe device |
| US5520653A (en) * | 1995-09-01 | 1996-05-28 | Medrad, Inc. | Syringe adapter for front-loading medical injector |
| JP3429922B2 (ja) * | 1995-10-30 | 2003-07-28 | スーガン株式会社 | シリンジ固定用補助器具 |
| JP4838468B2 (ja) * | 1999-07-30 | 2011-12-14 | メドラッド インコーポレーテッド | 注入器システム及び該注入器システムに用いられるシリンジアダプター |
| WO2002056947A1 (en) * | 2001-01-18 | 2002-07-25 | Medrad, Inc. | Syringe interfaces and adapters for use with medical injectors |
| JP2005000203A (ja) * | 2003-06-09 | 2005-01-06 | Nemoto Kyorindo:Kk | 薬液注入システム |
| WO2005102416A1 (en) * | 2004-04-27 | 2005-11-03 | Rodney Brian Savage | Medical fluid injector |
| US20080166292A1 (en) * | 2007-01-01 | 2008-07-10 | Medrad, Inc. | Pharmaceutical Dosing Method |
-
2015
- 2015-02-26 WO PCT/US2015/017650 patent/WO2015130884A1/en not_active Ceased
- 2015-02-26 US US15/121,325 patent/US20170065763A1/en not_active Abandoned
- 2015-02-26 JP JP2016548372A patent/JP2017506530A/ja active Pending
- 2015-02-26 KR KR1020167020868A patent/KR20160125951A/ko not_active Withdrawn
- 2015-02-26 EP EP15756046.7A patent/EP3110480A4/en not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004357748A (ja) * | 2003-06-02 | 2004-12-24 | Nemoto Kyorindo:Kk | 薬液注入システム |
| JP2004358047A (ja) * | 2003-06-06 | 2004-12-24 | Nemoto Kyorindo:Kk | 薬液注入システム |
| WO2011102416A1 (ja) * | 2010-02-19 | 2011-08-25 | 株式会社 東芝 | 移動物体追跡システムおよび移動物体追跡方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020505144A (ja) * | 2017-01-24 | 2020-02-20 | バイエル・ヘルスケア・エルエルシーBayer HealthCare LLC | インジェクタシステムおよびそれと共に使用するためのシリンジアダプタ |
| JP7086084B2 (ja) | 2017-01-24 | 2022-06-17 | バイエル・ヘルスケア・エルエルシー | インジェクタシステムおよびそれと共に使用するためのシリンジアダプタ |
| JP2023513736A (ja) * | 2020-02-12 | 2023-04-03 | ベクトン・ディキンソン・アンド・カンパニー | デバイスコネクタに接続されているデバイスを識別するためのセンサアセンブリおよびシステム、方法、ならびに、コンピュータプログラム製品。 |
| JP7753233B2 (ja) | 2020-02-12 | 2025-10-14 | ベクトン・ディキンソン・アンド・カンパニー | デバイスコネクタに接続されているデバイスを識別するためのセンサアセンブリおよびシステム、方法、ならびに、コンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20160125951A (ko) | 2016-11-01 |
| US20170065763A1 (en) | 2017-03-09 |
| WO2015130884A1 (en) | 2015-09-03 |
| EP3110480A1 (en) | 2017-01-04 |
| EP3110480A4 (en) | 2017-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017506530A (ja) | 医療注入器用万能アダプタと注射器識別システム | |
| JP7383068B2 (ja) | インジェクタシステムおよびそれと共に使用するためのシリンジアダプタ | |
| US12083321B2 (en) | Syringe retention feature for fluid injector system | |
| EP2363158B1 (en) | Power injector with rf sensor for detection of a prefilled syringe | |
| JP6002039B2 (ja) | 医療管類セットにおける二重逆止弁配列の機能を査定するためのシステムおよび方法 | |
| JP6174998B2 (ja) | 患者腎機能を用いる造影剤管理 | |
| US20150005715A1 (en) | Medical Connector For Use With The Fluid Delivery System and Fluid Path | |
| JP5535308B2 (ja) | Rfid装着ワンドを備えた医療流体送達システム | |
| CN103703468A (zh) | 造影剂注射数据管理系统 | |
| US20250269106A1 (en) | System, method and computer program for guided workflow features for operating a fluid injector system | |
| JP7783247B2 (ja) | 流体供給システム及び外部システムを接続するためのゲートウェイを提供するシステム、方法、及びコンピュータプログラム製品 | |
| US20070250008A1 (en) | Fluid injection apparatus and adaptor pump therefor | |
| JP2026069702A (ja) | 注入システム | |
| CN121511492A (zh) | 用于低造影介质剂量对比增强成像程序的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181015 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190603 |