JP2017515497A - 枢動可能な飼料混合機 - Google Patents
枢動可能な飼料混合機 Download PDFInfo
- Publication number
- JP2017515497A JP2017515497A JP2017500143A JP2017500143A JP2017515497A JP 2017515497 A JP2017515497 A JP 2017515497A JP 2017500143 A JP2017500143 A JP 2017500143A JP 2017500143 A JP2017500143 A JP 2017500143A JP 2017515497 A JP2017515497 A JP 2017515497A
- Authority
- JP
- Japan
- Prior art keywords
- feed
- container
- auger
- pivot
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K5/00—Feeding devices for stock or game ; Feeding wagons; Feeding stacks
- A01K5/001—Fodder distributors with mixer or shredder
- A01K5/004—Fodder distributors with mixer or shredder with mixing or shredding element rotating on vertical axis
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K5/00—Feeding devices for stock or game ; Feeding wagons; Feeding stacks
- A01K5/02—Automatic devices
- A01K5/0208—Automatic devices with conveyor belts or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/23—Mixers with rotary stirring devices in fixed receptacles; Kneaders characterised by the orientation or disposition of the rotor axis
- B01F27/231—Mixers with rotary stirring devices in fixed receptacles; Kneaders characterised by the orientation or disposition of the rotor axis with a variable orientation during mixing operation, e.g. with tiltable rotor axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/60—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a horizontal or inclined axis
- B01F27/72—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a horizontal or inclined axis with helices or sections of helices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/80—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis
- B01F27/92—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis with helices or screws
- B01F27/921—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis with helices or screws with helices centrally mounted in the receptacle
- B01F27/9212—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis with helices or screws with helices centrally mounted in the receptacle with conical helices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/80—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis
- B01F27/92—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis with helices or screws
- B01F27/922—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis with helices or screws with two or more helices, e.g. with intermeshing helices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/20—Measuring; Control or regulation
- B01F35/21—Measuring
- B01F35/211—Measuring of the operational parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/20—Measuring; Control or regulation
- B01F35/21—Measuring
- B01F35/211—Measuring of the operational parameters
- B01F35/2117—Weight
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/20—Measuring; Control or regulation
- B01F35/21—Measuring
- B01F35/212—Measuring of the driving system data, e.g. torque, speed or power data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/20—Measuring; Control or regulation
- B01F35/22—Control or regulation
- B01F35/221—Control or regulation of operational parameters, e.g. level of material in the mixer, temperature or pressure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/50—Mixing receptacles
- B01F35/51—Mixing receptacles characterised by their material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/75—Discharge mechanisms
- B01F35/754—Discharge mechanisms characterised by the means for discharging the components from the mixer
- B01F35/7548—Discharge mechanisms characterised by the means for discharging the components from the mixer using tilting or pivoting means for emptying the mixing receptacle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F2101/00—Mixing characterised by the nature of the mixed materials or by the application field
- B01F2101/06—Mixing of food ingredients
- B01F2101/18—Mixing animal food ingredients
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P60/00—Technologies relating to agriculture, livestock or agroalimentary industries
- Y02P60/80—Food processing, e.g. use of renewable energies or variable speed drives in handling, conveying or stacking
- Y02P60/87—Re-use of by-products of food processing for fodder production
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Environmental Sciences (AREA)
- Birds (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
- Apparatuses For Bulk Treatment Of Fruits And Vegetables And Apparatuses For Preparing Feeds (AREA)
- Mixers Of The Rotary Stirring Type (AREA)
- Mixers With Rotating Receptacles And Mixers With Vibration Mechanisms (AREA)
- Accessories For Mixers (AREA)
Abstract
Description
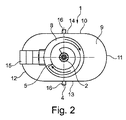
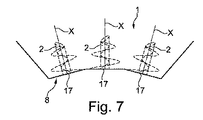
2 オーガー
3 駆動装置
4 枢軸
5 刃
6 搬送手段
7 除去位置
8 底面
9 充填口
10 壁
11、12 円錐形の壁部
13、14 壁部
15 コンベアベルト
16 ピン
17 底部
X 軸、オーガー
W 充填口に向かって円錐形に先細りするオーガーの角度
H 容器の高さ
I 各容器の軸方向範囲
K 壁角度
V 枢動角度
V´ 荷下ろし角度
Claims (27)
- 以下のステップを含む、飼料混合物を提供する方法:
飼料混合機の容器(1)内に少なくとも一つの飼料成分を導入することであって、前記容器(1)は、底面(8)と、前記底面(8)につながって充填口(9)の範囲を定める壁(10)とを有し、前記充填口(9)の面積は、前記底面(8)の面積よりも大きく;
混合操作を実行するために、前記底面(8)に対して略垂直に伸びる軸(X)を中心に回転可能な少なくとも一つのオーガー(2)を作動することと;
特に既定の時間後、又は前記少なくとも一つのオーガー(2)の既定の回転数の後、前記混合操作中に前記容器(1)を枢動させること。 - 前記既定の時間又は前記既定の回転数は、前記少なくとも一つの飼料成分の少なくとも一つの特徴の関数として、特に少なくとも一つの飼料成分の体積及び/又は重量の関数として決定される、請求項1に記載の方法。
- 少なくとも二つの飼料成分を次々に前記容器(1)内に導入し、前記既定の時間又は前記既定の回転数は、前記導入の順序の関数として決定される、請求項1又は2に記載の方法。
- 前記既定の時間又は前記既定の回転数は、前記飼料成分又は複数の飼料成分の全重量及び/又は個々の重量の関数として決定される、請求項1、2又は3に記載の方法。
- 前記既定の時間又は前記既定の回転数は、前記充填口(9)に向かって円錐形に先細りする前記オーガー(2)の角度(W)の関数として決定される、請求項1から4の少なくとも一項に記載の方法。
- 前記既定の時間又は前記既定の回転数は、前記容器(1)の高さ(H)と前記少なくとも一つのオーガー(2)の軸方向範囲(I)との比の関数として決定される、請求項1から5の少なくとも一項に記載の方法。
- 前記既定の時間又は前記既定の回転数は、前記底面(8)から略円錐形に拡幅する少なくとも一つの壁部(11、12)の壁角度(K)の関数として決定される、請求項1から6の少なくとも一項に記載の方法。
- 前記オーガー(2)の前記軸(X)が枢動角度(V)で重力の軸と交差するように前記容器(1)を枢動する、請求項1から7の少なくとも一項に記載の方法。
- 前記枢動角度(V)は、前記少なくとも一つの飼料成分の少なくとも一つの特徴の関数として決定される、請求項8による方法。
- 少なくとも二つの飼料成分は、前記容器(2)内に次々に導入され、前記枢動角度(V)は、前記導入の前記順序の関数として決定される、請求項8又は9に記載の方法。
- 前記枢動角度(V)は、前記飼料成分又は複数の飼料成分の全重量及び/又は個々の重量の関数として決定される、請求項8、9又は10に記載の方法。
- 前記枢動角度(V)は、前記充填口(9)に向かって円錐形に先細りする前記オーガー(2)の角度(W)の関数として決定される、請求項8から11の少なくとも一項に記載の方法。
- 前記枢動角度(V)は、前記容器(1)の前記高さ(H)と前記少なくとも一つのオーガー(2)の前記軸方向範囲(I)との比によって決定される、請求項8から12の少なくとも一項に記載の方法。
- 前記枢動角度(V)は、前記底面(8)から略円錐形に拡幅する少なくとも一つの壁部(11、12)の壁角度(K)の関数として決定される、請求項8から13の少なくとも一項に記載の方法。
- 略水平に伸びる枢軸(4)を中心に前記容器(1)を枢動させる、請求項1から14の少なくとも一項に記載の方法。
- 前記飼料混合物を荷下ろしするために、前記容器(1)を荷下ろし角度(V´)で枢動させる、請求項1から15の少なくとも一項に記載の方法。
- 前記飼料混合物を荷下ろすための枢動方向は、前記混合操作中の枢動方向に相当し、前記荷下ろし角度(V´)は、前記枢動角度(V)よりも大きく、前記枢動角度(V)の倍数であることが好ましい、請求項16に記載の方法。
- 飼料混合物を提供するための飼料混合機であって、前記飼料混合機は、
底面(8)と、前記底面(8)につながって充填口(9)の範囲を定める壁(10)とを有する容器(1)であって、前記充填口(9)の面積は、前記底面(8)の面積よりも大きい容器(1)と、
前記底面(8)に対して略垂直に伸びる軸(X)を中心に回転可能である少なくとも一つのオーガー(2)と
を備え、
特に既定の時間後、又は前記少なくとも一つのオーガー(2)の既定の回転数の後、混合操作中に前記容器(1)を枢動させることを意図する適切な枢動装置によって特徴付けられる、飼料混合機。 - 計量装置を有することを特徴とする、請求項18に記載の飼料混合機。
- 前記容器(1)が有する高さ(H)と、前記少なくとも一つのオーガー(2)が有する軸方向範囲(I)との比は、1.1よりも大きく、好ましくは1.2から1.8の間にあることを特徴とする、請求項18又は19に記載の飼料混合機。
- 前記オーガー(2)の前記軸(X)が枢動角度(V)で重力の軸と交差するように前記容器(1)を枢動させることを特徴とする、請求項18、19又は20に記載の飼料混合機。
- 前記容器(1)は、壁角度(K)で前記底面(8)から略円錐形に拡幅する少なくとも一つの壁部(11、12)を有し、前記壁角度(K)と前記枢動角度(V)との比は3より大きく、好ましくは3.5から7の間にあることを特徴とする、請求項21に記載の飼料混合機。
- 前記容器(1)は、略水平に伸びる枢軸(4)を中心に枢動されることを特徴とする、請求項18から22の少なくとも一項に記載の飼料混合機。
- 前記枢動装置は、少なくとも一つのシリンダ/ピストンユニットを有することを特徴とする、請求項18から23のいずれか一項に記載の飼料混合機。
- 前記容器(1)は、複数のピン(16)を有することを特徴とし、前記複数のピン(16)は、互いに対向しつつ前記壁(10)から突出し、前記容器(1)の両側に配置される支持構造物の対応する受け部と係合する、請求項24に記載の飼料混合機。
- 前記容器(1)から飼料混合物を排出する搬送手段(15)を設けることを特徴とする、請求項18から25の少なくとも一項に記載の飼料混合機。
- 信号技術の観点から少なくとも前記枢動装置に接続される制御装置を有することを特徴とする、請求項18から26の少なくとも一項に記載の飼料混合機。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014103857.6A DE102014103857A1 (de) | 2014-03-20 | 2014-03-20 | Schwenkbarer Futtermischer |
| DE102014103857.6 | 2014-03-20 | ||
| PCT/EP2015/054515 WO2015139960A1 (en) | 2014-03-20 | 2015-03-04 | Pivotable feed mixer |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017515497A true JP2017515497A (ja) | 2017-06-15 |
Family
ID=52597007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017500143A Pending JP2017515497A (ja) | 2014-03-20 | 2015-03-04 | 枢動可能な飼料混合機 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10609897B2 (ja) |
| EP (1) | EP3119191B1 (ja) |
| JP (1) | JP2017515497A (ja) |
| CA (1) | CA2940785C (ja) |
| DE (1) | DE102014103857A1 (ja) |
| WO (1) | WO2015139960A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107466901A (zh) * | 2017-08-29 | 2017-12-15 | 许昌市夏昌种畜禽有限公司 | 一种畜禽培育用喂养装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014103857A1 (de) * | 2014-03-20 | 2015-09-24 | Gea Farm Technologies Gmbh | Schwenkbarer Futtermischer |
| CN111921423B (zh) * | 2020-08-06 | 2022-07-29 | 海盐县安巨机械制造有限公司 | 一种墙板生产用原料搅拌设备 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6115949Y2 (ja) * | 1983-05-20 | 1986-05-17 | ||
| US20040163577A1 (en) * | 2003-01-28 | 2004-08-26 | Trioliet Mullos B.V. | Fodder mixing wagon |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1928229A2 (en) | 2005-08-30 | 2008-06-11 | Cornelis Hendricus Liet | Apparatus for processing feed for cattle |
| US8408485B2 (en) | 2009-09-11 | 2013-04-02 | Mark A. Milam | Skid steer mixer attachment |
| IES20100086A2 (en) | 2010-02-17 | 2011-09-28 | Michael Ward | An animal feed mixing, dispensing and storage apparatus |
| DE202011105225U1 (de) | 2011-09-01 | 2012-12-19 | Trioliet Holding B.V. | Fördervorrichtung |
| NL2011356C2 (nl) * | 2013-08-29 | 2015-03-03 | Peeters Landbouwmach | Voermengwagen en werkwijze voor het uitvoeren van onderhoud aan een dergelijke voermengwagen. |
| DE102014103857A1 (de) * | 2014-03-20 | 2015-09-24 | Gea Farm Technologies Gmbh | Schwenkbarer Futtermischer |
| US10786794B2 (en) * | 2015-05-22 | 2020-09-29 | Digi-Star, Llc | Recording mixer rotation rate along with weight of feed and date and time |
| US10499680B2 (en) * | 2017-03-13 | 2019-12-10 | Kuhn North America, Inc. | Control system for a livestock feed mixer |
-
2014
- 2014-03-20 DE DE102014103857.6A patent/DE102014103857A1/de not_active Withdrawn
-
2015
- 2015-03-04 US US15/122,878 patent/US10609897B2/en active Active
- 2015-03-04 EP EP15707400.6A patent/EP3119191B1/en active Active
- 2015-03-04 CA CA2940785A patent/CA2940785C/en active Active
- 2015-03-04 WO PCT/EP2015/054515 patent/WO2015139960A1/en not_active Ceased
- 2015-03-04 JP JP2017500143A patent/JP2017515497A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6115949Y2 (ja) * | 1983-05-20 | 1986-05-17 | ||
| US20040163577A1 (en) * | 2003-01-28 | 2004-08-26 | Trioliet Mullos B.V. | Fodder mixing wagon |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107466901A (zh) * | 2017-08-29 | 2017-12-15 | 许昌市夏昌种畜禽有限公司 | 一种畜禽培育用喂养装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2940785A1 (en) | 2015-09-25 |
| US10609897B2 (en) | 2020-04-07 |
| DE102014103857A1 (de) | 2015-09-24 |
| US20170094937A1 (en) | 2017-04-06 |
| EP3119191B1 (en) | 2019-05-01 |
| EP3119191A1 (en) | 2017-01-25 |
| CA2940785C (en) | 2022-08-16 |
| WO2015139960A1 (en) | 2015-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4561781A (en) | Agricultural feed blending apparatus | |
| EP1513606B1 (en) | Vertical mixer for a fodder mixing device | |
| CA1182446A (en) | Vertical and horizontal auger circulating sets operating portable feed grinder mixers | |
| AU2013255453B2 (en) | An animal feed mixing and dispensing apparatus | |
| US3638920A (en) | Material-mixing apparatus | |
| CN108097127A (zh) | 一种防止结块的饲料混合装置 | |
| CN108523181A (zh) | 一种具有原料粉碎筛选混合功能的饲料制粒装置 | |
| JP2017515497A (ja) | 枢動可能な飼料混合機 | |
| KR20200078123A (ko) | 주행식 사료정렬장치 | |
| US7040801B2 (en) | Mixing apparatus with non-concentric auger | |
| CN107970819A (zh) | 一种基于左右摆动式的饲料用混合设备 | |
| US4092014A (en) | Feed mixer | |
| KR101383372B1 (ko) | 섬유질 배합 사료 자동 공급 장치 | |
| KR101532928B1 (ko) | 원료 정량 공급 장치 | |
| US20110180642A1 (en) | Portable combination horizontal grinder mixer | |
| CN108043281A (zh) | 一种用于生产无反式脂肪酸植脂末的配料混料一体化高效搅拌装置 | |
| CN110170264A (zh) | 一种新型饲料拌料机 | |
| CN108157206A (zh) | 自动出料装置及饲喂装置 | |
| US7281843B1 (en) | Vertical agricultural mixer | |
| CN207591774U (zh) | 一种羊类饲料比例混合装置 | |
| CN223196917U (zh) | 一种自动供料的牛羊饲料混合搅拌机 | |
| CN210934734U (zh) | 一种畜牧饲料初步打散混合处理装置 | |
| CN212819604U (zh) | 一种饲料的配料搅拌设备 | |
| CN210356950U (zh) | 一种饲料混合搅拌装置 | |
| CN209549368U (zh) | 一种立式饲料混合搅拌及输送联合作业装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161216 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20161216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171121 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180619 |