JP2017526986A - マクロレンズ - Google Patents
マクロレンズ Download PDFInfo
- Publication number
- JP2017526986A JP2017526986A JP2017527200A JP2017527200A JP2017526986A JP 2017526986 A JP2017526986 A JP 2017526986A JP 2017527200 A JP2017527200 A JP 2017527200A JP 2017527200 A JP2017527200 A JP 2017527200A JP 2017526986 A JP2017526986 A JP 2017526986A
- Authority
- JP
- Japan
- Prior art keywords
- lens
- lenses
- area
- optical axis
- movable element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B15/00—Optical objectives with means for varying the magnification
- G02B15/14—Optical objectives with means for varying the magnification by axial movement of one or more lenses or groups of lenses relative to the image plane for continuously varying the equivalent focal length of the objective
- G02B15/22—Optical objectives with means for varying the magnification by axial movement of one or more lenses or groups of lenses relative to the image plane for continuously varying the equivalent focal length of the objective with movable lens means specially adapted for focusing at close distances
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/18—Optical objectives specially designed for the purposes specified below with lenses having one or more non-spherical faces, e.g. for reducing geometrical aberration
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/24—Optical objectives specially designed for the purposes specified below for reproducing or copying at short object distances
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/12—Fluid-filled or evacuated lenses
- G02B3/14—Fluid-filled or evacuated lenses of variable focal length
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
- G02B7/105—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens with movable lens means specially adapted for focusing at close distances
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Lenses (AREA)
Abstract
Description
本国際特許出願は、2014年8月8日に出願された国際特許出願第PCT/US2014/050318号からの優先権を主張する。本国際出願はまた、2014年11月6日に出願された米国特許仮出願第62/076,303号および2014年12月18日に出願された米国特許仮出願第62/093,909号からの優先権を主張する。
本発明は、ズームレンズシステムに関し、特に、システムの構成レンズの面の軸部分(特定の場合、該軸部分は扁長非球面として成形されることができる)の平坦化の結果として実効焦点距離を連続的に変化させるように構成されているマルチレンズマクロレンズシステムに関する。
態様は、(i)第一の度数を有する第一のレンズレットであって、その開放口を画定する第一の回転対称光学部分を有する第一のレンズレット、および(ii)第二の度数を有する第二のレンズレットであって、その開放口を画定する第二の回転対称光学部分を有する第二のレンズレットを含み、第一および第二のレンズレットが同軸に配置されて、軸点においてそれらの面の間に接点を画定する、可変焦点距離マクロレンズシステムを提供する。システムはさらに、第一および第二のレンズレットの少なくとも一つの面に加えられた運動を、前記面の少なくとも一つを軸点の周囲で圧平する力に伝達するための手段であって、当該面の圧平の面積がそのような運動の程度に依存するような手段を含む。システムは、第一および第二のレンズレットを囲い込み、運動伝達手段(特定の場合、ハウジングに対して内部に移動可能なピストンを含み得る)と機械的に協働するハウジングユニットを備え得る。一つの態様において、レンズシステムは、前記手段によって第一および第二の面の少なくとも一つに伝達される非ゼロ力に応答して第一のレンズレットの第一の面および第二のレンズレットの第二の面を相互作用させて互いを圧平させて、運動伝達手段によって生成されるそのような非ゼロ力の増大とともに直径が漸増するそれぞれの圧平区域を画定するように構成されている。特定の場合において、そのような力の増大に応答する第一および第二の面のいずれかの圧平区域の直径の増大の過程、圧平区域の直径の変化によって生じるレンズシステムの光学収差は最小化される。
可変焦点レンズシステムの必要性は数多く、光学エンジニアリングにおける使用(たとえば、品質管理目的に使用されるイメージングシステムにおける使用)から写真にまで及ぶ。
本発明のレンズシステムまたはそのようなシステムのサブセットの態様における要素または部品の順序を記載する際、別段述べられない限り、概して以下の取り決めにしたがう。レンズアセンブリの連続的に配置された構造要素の面が、動作中および/または設置時、被写体からレンズシステムに入射する光の方向に沿って見られる順序は昇順であり、その順序において、これらの面は、第一の面(または面1、面I)、第二の面(または面2、面II)、第三の面(または面3、面III)、第四の面(または面4、面IV)および他の面(存在するならば)と呼ばれる。たとえば、図1A、1B、1Cの場合、光の入射方向はz軸として示されている。したがって、概して、本発明の態様の構造要素(たとえば個々の光学要素)の面は、レンズシステムの前部に相当する、被写体に近い面から出発し、かつ、アセンブリの後部に相当する、像平面に近い面で終了するように番号で標識される。したがって、用語「〜の後」とは、空間中、他のものの位置に続く位置をいい、レンズアセンブリの正面から見て、一つの要素または一つの物が別の要素または別の物の背後にあることを示唆する。同様に、用語「〜の前」とは、アセンブリの正面から見て、特定の要素に対して前方の場所または位置をいう。当業者によって理解されるように、レンズは、面Iを通して光(周囲媒質から入射する)を受けるように構成されており;個々の要素の面および/またはパラメータの順序が特定の構成に比較して変更されるとき、マクロレンズの光学特性および動作の変化は激烈かつ予測不可能となり得、別個の考慮を要する。換言するならば、入射光に対する所与のマクロレンズまたはその構成要素の配向における任意の変化は、被写体のイメージングに関し、そのような所与のマクロレンズがそのために構成されている場合と同等または類似の結果を提供しない。
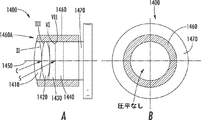
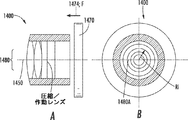
図2A、2B、3Aおよび3Bは、本発明の概念にしたがって構造化され、動作可能な可変焦点マクロレンズシステムの態様1400の、側面図および正面図としての略図である。概して、本発明のマクロレンズは、中空の容積を中に画定する外側シェルを有するハウジング1460内で光軸(1450として示す)を中心に連続的かつ同軸に配置された複数の個々のレンズ(レンズ1410、1420、1430、1440として示す)の列(配列)を含む。レンズ1410の前面(面I、記さず)がマクロレンズの前面に相当する。個々のレンズ1410、1420、1430および1440は空洞中に配置されている。概して、ハウジング1460は、レンズをハウジングの空洞内に維持するために適切なストッパ要素(図示せず)を前面部分1460Aに備えている。図示するように、二つの隣接する各レンズは、対応する軸点で互いと当接して、これら二つの隣接するレンズの相互対向面が軸点で互いと接触する。たとえば、図示するように、システムの面II、III(それぞれレンズ1410、1420に対応する)は軸点Cで接触し、一方で、システムの面VI、VII(それぞれレンズ1430、1440に対応する)は軸点Sで接触する。本発明の概念にしたがって、本発明のマクロレンズシステムの相互接触面の対における面の少なくとも一つは扁長非球面である。たとえば、面II、IIIの少なくとも一つは、軸1450を中心に扁長非球形プロフィールを有する。非球面(または非球体)を有するレンズは、当技術分野において、表面プロフィールが球体または円柱(または球面もしくは円柱面)の一部分ではないレンズとして公知である。非球面の表面プロフィールは一般に、光軸から所与の距離での頂点からの面の変位を表す関数として規定される。そのような関数のパラメータは、曲率半径および頂点で規定される円錐定数(または円錐パラメータ)を含む。扁長非球面とは、円錐定数の値が-1〜0である非球面である。用語「面」は、二つの媒質の間の境界または有形要素の境界もしくは空間的限界を示すために使用され;面は、長さおよび幅を有するが、厚さを有しないものと理解される。
図4Aの具体的態様に示すように、光軸1904を有するマクロレンズ1900が、二つの軸方向に接触するレンズ1910、1920によって形成されている。無応力状態(すなわち、相互接触面II、IIIが変形していないとき)のレイアウト1900の設計パラメータが図4Aに示されている。「ガラス」と標識されたデータ列が概して、ガラス材料とは異なり得、たとえばプラスチックを含むことができる、個々のレンズのための材料を含むことが理解されよう。この特定の例において、たとえば、レンズ1910および1920はいずれもシリコーンでできている。
レンズ列中に同軸に配置された三つのレンズを含む関連の態様800(図7A、7B)が、態様の内面が完全に圧平(平坦化)されるとき、同様な面圧平漸増中に起こる43.4ジオプターの度数変化を実証した。図4A〜4Fの態様1900との比較において、これは、ハウジングハーネス構造のピストン1450の軸方向位置移動範囲の増大を必要とする。説明の簡略化のために、態様800は、ハウジングハーネスおよびピストン/コンプレッサなしで示されている。図7Aは、レンズ810、820および830の隣接するレンズが無応力状態で互いに物理的に接触している、光軸804を有する3-レンズ態様800のレイアウトを示す。換言するならば、レンズ810および820は面IIおよびIIIの軸点O、O'で接触し、レンズ820、830は面IVおよびVの軸点O''、O'''で接触している。図7Aはまた、態様の変調伝達関数(MTF)を表す曲線840およびそのような無応力状態の場合のZemaxレンズデータを提供する。モジュラス44mmからモジュラス300mmへのレンズ800の内面の曲率半径の増大に対応する、応力状態(レンズ810がハウジングハーネス中に固定されているとき面Iの方向への軸方向力を面VIに加えることによって生じる)におけるレンズ810、820、830の形状が図7Bに示され、ここで、内面II、II、IV、Vの平坦化区域が概略的かつ一定の尺度でなく集合的に844と記されている。三つより多い連続的に配置された個々のレンズを有する態様が実質的に同様なやり方で構造化され、その場合、さらに大きな焦点距離の変化を達成することができることが理解されよう。
図8A、8Bは、態様1600の構成要素であるレンズの面の圧平の結果として大きな度数変動を提供するように構成されたマクロレンズを形成するように構造化された関連態様1600を示す。この態様によって達成可能な度数の範囲は60ジオプターもの高さである。
Claims (31)
- 第一の度数を有する第一のレンズと、
第二の度数を有し、該第一のレンズと同軸に配置された第二のレンズと、
該第一および第二のレンズの少なくとも一つと動作可能に協働する第一の位置移動可能な要素であって、該第一の位置移動可能な要素の可逆的運動に応答して該第一のレンズの第一の面および該第二のレンズの第二の面の少なくとも一つの圧平の尺度を可逆的に変更するように構成されており、該第一および第二の面が互いに対面する、第一の位置移動可能な要素と
を含む、光軸を有する可変焦点距離マクロレンズシステムであって、
該マクロレンズシステムの焦点距離が該第一の位置移動可能な要素の該可逆的運動に依存する、
可変焦点距離マクロレンズシステム。 - 第一および第二のレンズが第一の位置移動可能な要素によって応力を加えられないとき、第一および第二の面が、光軸を中心とする区域で互いと接触する、請求項1記載のシステム。
- 第一の位置移動可能な要素が、前記可逆的運動に基づいて、光軸に沿って第一および第二のレンズの少なくとも一つの面に加えられるベクトル力を規定するように構成されており、該第一および第二のレンズの軸方向位置が該可逆的運動に依存しない、請求項1記載のシステム。
- 第一の位置移動可能な要素が、第一および第二の面の少なくとも一つの平坦な区域を画定するように構成されており、該平坦な区域が光軸を中心に対称であり、該平坦な区域の表面積が前記可逆的運動の大きさに依存する、請求項3記載のシステム。
- ベクトル力が第一および第二のレンズの少なくとも一つの面の周辺部分に加えられる、請求項2記載のシステム。
- 外側シェルおよびその中の空洞を画定するハウジングユニットをさらに含み、第一および第二のレンズが該空洞中に配置され、第一の位置移動可能な要素の一部分が、光軸に沿って該空洞の内側で可逆的に移動するように寸法決定されている、請求項1記載のシステム。
- 第一の位置移動可能な要素がピストンを含む、請求項6記載のシステム。
- 空洞の表面が、第一の位置移動可能な要素を案内するように寸法決定されたねじを有する、請求項6記載のシステム。
- 第一および第二の面の少なくとも一つが、無応力状態で、光軸を中心とする扁長非球面を含む、請求項1記載のシステム。
- 第一および第二の面の少なくとも一つが、該第一および第二の面の該少なくとも一つに向かって起こる可逆的運動に応答して平坦な区域の直径が増大する過程で、該第一および第二の面の該少なくとも一つの形状の変化によって生じるシステムの光学収差が最小化されるように成形されている、請求項1記載のシステム。
- 前記可逆的運動の結果として第一および第二の面の少なくとも一つの周辺区域に加えられる非ゼロ力に応答して該第一および第二の面を互いに相互作用させて、互いを相互に平坦化させて、光軸を中心にしたそれぞれの平坦化区域を画定するように構成されており、該平坦化区域それぞれの直径が該非ゼロ力の増大とともに漸増する、請求項1記載のシステム。
- 第一および第二のレンズと同軸に配置され、かつ該第二のレンズによって該第一のレンズから切り離された第三のレンズをさらに含み、該第三のレンズが、光軸を中心とする扁長非球面を有する、請求項1記載のシステム。
- 二つのレンズ群であって、第一および第二の群が間隙によって互いから切り離されており、該第一の群が第一および第二のレンズを含み、該第二の群が第三のレンズを含む、二つのレンズ群を含み、
該第二の群と動作可能に協働する第二の位置移動可能な要素であって、該第二の位置移動可能な要素の可逆運動に応答して該第三のレンズの面の曲率を変化させるように構成されている、第二の位置移動可能な要素をさらに含む、
請求項12記載のシステム。 - 第一のレンズ群の焦点と第二のレンズ群の焦点とが一致する、請求項13記載のシステム。
- 第一のレンズ群がプラスの度数を有し、第二のレンズ群がマイナスの度数を有する、請求項13記載のシステム。
- 第一および第二のレンズ群それぞれが、対応するプラスの度数を有する、請求項13記載のシステム。
- 第二のレンズ群が、第三のレンズの屈折率よりも高い屈折率を有する流体に浸漬されている、請求項16記載のシステム。
- 請求項13記載のマクロレンズシステムと、第一のレンズ群と光学的に連絡し、かつ第二のレンズ群によって該第一のレンズ群から切り離された光学検出器とを含む、光学カメラ。
- 光軸と第一および第二の構成レンズとを有するマクロレンズを作動させる方法であって、
第一の像を形成するために、該マクロレンズの前面に入射した光を、光軸を中心とする第一の接触区域で互いと接触する該マクロレンズの二つの面に透過させる工程であって、該第一の接触区域が第一の表面積を有する、工程;および
該二つの面の第一面と第二の面との間に第二の接触区域を形成するために、該二つの面の第一の面を該二つの面の第二の面に対して該光軸に沿う第一の方向に軸方向に位置移動する工程であって、該第二の接触区域が第二の表面積を有し、該第一の表面積と該第二の表面積とが互いに異なる、工程
を含む、方法。 - 軸方向に位置移動する工程が、第一および第二の構成レンズそれぞれの軸方向位置を維持する工程を含む、請求項19記載の方法。
- 二つの面の第一面と第二の面との間に第三の接触区域を形成するために、該二つの面の第一の面を該二つの面の第二の面に対して光軸に沿う第二の方向に軸方向に位置移動する工程をさらに含み、該第三の接触区域が第三の表面積を有し、該第二の方向が前記第一の方向とは反対である、請求項19記載の方法。
- 第二の方向に軸方向に位置移動する工程が、第一の表面積に等しい第三の表面積を形成する工程を含む、請求項21記載の方法。
- マクロレンズに対して外部にある要素からの機械的エネルギーを二つのレンズの少なくとも一つに伝達する工程をさらに含む、請求項19記載の方法。
- 第二の像を形成するために、前記光を、第二の接触区域を有するマクロレンズに透過させる工程をさらに含む、請求項19記載の方法。
- 軸方向位置移動の結果として、二つの面の第一および第二の面の少なくとも一つの円錐定数の値を変化させる工程をさらに含む、請求項19記載の方法。
- 二つの面の第一および第二の面の少なくとも一つの曲率を変化させる工程をさらに含む、請求項19記載の方法。
- 軸方向に位置移動する工程が、第二の表面積を第一の表面積よりも大きくするために、二つの面の一つによって光軸に沿って該二つの面のもう一つの面に加えられるベクトル力を増大させる工程を含む、請求項19記載の方法。
- 軸方向に位置移動する工程が、平坦な面を有するように第二の接触区域を画定するために、二つの面の第一および第二の面の少なくとも一つの頂点の面を平坦化させる工程を含む、請求項19記載の方法。
- 二つの面の第一および第二の面の頂点間の接触を形成することによって第一の接触区域を画定する工程をさらに含み、該二つの面の第一の面の頂点が扁長非球面の頂点である、請求項19記載の方法。
- 軸方向位置移動の結果としてマクロレンズの実効焦点距離を変化させる工程をさらに含む、請求項19記載の方法。
- 光を、第一および第二のレンズと同軸に配置され、かつ間隙によって該第一および第二のレンズから切り離されている第三のレンズの面に透過させる工程、および
該第三のレンズの該面の、光軸に関して対称である一部分を平坦化させる工程
をさらに含む、請求項19記載の方法。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| USPCT/US2014/050318 | 2014-08-08 | ||
| PCT/US2014/050318 WO2015134058A1 (en) | 2014-03-07 | 2014-08-08 | Refocusable lens system with mutually-applanating internal surfaces |
| US201462076303P | 2014-11-06 | 2014-11-06 | |
| US62/076,303 | 2014-11-06 | ||
| US201462093909P | 2014-12-18 | 2014-12-18 | |
| US62/093,909 | 2014-12-18 | ||
| PCT/US2015/043965 WO2016022771A1 (en) | 2014-08-08 | 2015-08-06 | Macro lens |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017526986A true JP2017526986A (ja) | 2017-09-14 |
| JP2017526986A5 JP2017526986A5 (ja) | 2018-09-13 |
| JP6475834B2 JP6475834B2 (ja) | 2019-02-27 |
Family
ID=55264547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017527200A Expired - Fee Related JP6475834B2 (ja) | 2014-08-08 | 2015-08-06 | マクロレンズ |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US10191261B2 (ja) |
| EP (1) | EP3177956B1 (ja) |
| JP (1) | JP6475834B2 (ja) |
| KR (1) | KR102274385B1 (ja) |
| CN (1) | CN106662730B (ja) |
| AU (3) | AU2015300980B2 (ja) |
| CA (1) | CA2957658C (ja) |
| MX (1) | MX367086B (ja) |
| WO (1) | WO2016022771A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023545608A (ja) * | 2021-01-21 | 2023-10-31 | コネクサス レンズ, インク. | 変形可能レンズの表面の圧平の変化中に変形可能レンズに複数の焦点が形成されることによる効果の低減 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102663749B1 (ko) * | 2016-02-17 | 2024-05-08 | 삼성전자주식회사 | 옵티칼 렌즈 어셈블리, 장치, 및 이미지 형성 방법 |
| WO2019138411A1 (en) * | 2018-01-14 | 2019-07-18 | David Smadja | Lens systems for visual correction and enhancement |
| CN110909590A (zh) * | 2019-09-19 | 2020-03-24 | 华东师范大学 | 一种获取植物形态结构图像的方法 |
| US20240115373A1 (en) * | 2019-10-03 | 2024-04-11 | Jitander Dudee | Accommodating intraocular lens assembly |
| US12035972B2 (en) * | 2019-10-03 | 2024-07-16 | Jitander Dudee | Trephination apparatus and method |
| US12393000B2 (en) * | 2020-02-25 | 2025-08-19 | Zebra Technologies Corporation | Optical arrangement for small size wide angle auto focus imaging lens for high resolution sensors |
| CN112363256A (zh) * | 2020-11-25 | 2021-02-12 | 龙岩市帝昂光学有限公司 | 一种用于功率耦合器的自聚焦透镜及其制备方法 |
| CN114791656B (zh) * | 2021-01-25 | 2024-04-12 | 浙江舜宇光学有限公司 | 光学成像镜头 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63208817A (ja) * | 1987-02-25 | 1988-08-30 | Canon Inc | 屈折力可変レンズを有した変倍光学系 |
| JPH0338608A (ja) * | 1989-07-05 | 1991-02-19 | Asahi Optical Co Ltd | 変倍光学系 |
| JP2007094170A (ja) * | 2005-09-29 | 2007-04-12 | Nikon Corp | 正立変倍アフォーカル光学系 |
| JP2008203652A (ja) * | 2007-02-21 | 2008-09-04 | Nikon Corp | 実像式変倍アフォーカル光学系 |
| US20100157438A1 (en) * | 2008-12-18 | 2010-06-24 | Bae Systems Plc | Fluidic lens |
| JP2010276716A (ja) * | 2009-05-26 | 2010-12-09 | Sony Corp | 酸化膜の形成方法、エレクトロウェッティング装置、液体レンズ装置、液滴装置、光学素子、ズームレンズ、撮像装置、光変調装置、表示装置及びストロボ装置 |
| US20120307384A1 (en) * | 2011-06-01 | 2012-12-06 | Hong Kong Applied Science And Technology Research Institute Co., Ltd. | Deformable lens assembly |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS557764A (en) * | 1978-07-03 | 1980-01-19 | Nippon Bell Haueru Kk | Zoom lens device capable of macro photography |
| US4514048A (en) * | 1981-08-17 | 1985-04-30 | Polaroid Corporation | Variable focus elastomeric lens system |
| JPS62203119A (ja) * | 1986-03-01 | 1987-09-07 | Canon Inc | 防振機能を有した撮影レンズ |
| WO1997036193A1 (de) * | 1996-03-26 | 1997-10-02 | Mannesmann Ag | Optoelektronisches abbildungssystem für industrielle anwendungen |
| US6292311B1 (en) * | 1999-10-13 | 2001-09-18 | Hewlett-Packard Company | Method and apparatus for centering a lens within an optical bore sleeve |
| JP2003315650A (ja) | 2002-04-26 | 2003-11-06 | Olympus Optical Co Ltd | 光学装置 |
| US7813047B2 (en) * | 2006-12-15 | 2010-10-12 | Hand Held Products, Inc. | Apparatus and method comprising deformable lens element |
| WO2008076399A2 (en) * | 2006-12-15 | 2008-06-26 | Hand Held Products, Inc. | Apparatus and method comprising deformable lens element |
| US8922902B2 (en) | 2010-03-24 | 2014-12-30 | Mitsui Chemicals, Inc. | Dynamic lens |
| KR101542730B1 (ko) * | 2007-09-11 | 2015-08-07 | 코닌클리케 필립스 엔.브이. | 조명 시스템, 광원 및 빔 제어 소자 |
| CN101836135B (zh) * | 2007-10-08 | 2013-10-30 | 黑眼睛光学有限公司 | 液体光学变焦透镜和成像装置 |
| US8659835B2 (en) * | 2009-03-13 | 2014-02-25 | Optotune Ag | Lens systems and method |
| EP2296019A1 (en) * | 2009-09-14 | 2011-03-16 | poLight AS | Optical power switch (OPS) |
| US20120320257A1 (en) * | 2011-06-17 | 2012-12-20 | Gal Shabtay | Auto-focus actuator for field curvature correction of zoom lenses |
-
2015
- 2015-08-06 KR KR1020177006489A patent/KR102274385B1/ko not_active Expired - Fee Related
- 2015-08-06 MX MX2017001542A patent/MX367086B/es active IP Right Grant
- 2015-08-06 WO PCT/US2015/043965 patent/WO2016022771A1/en not_active Ceased
- 2015-08-06 CN CN201580047018.XA patent/CN106662730B/zh not_active Expired - Fee Related
- 2015-08-06 JP JP2017527200A patent/JP6475834B2/ja not_active Expired - Fee Related
- 2015-08-06 CA CA2957658A patent/CA2957658C/en active Active
- 2015-08-06 US US15/501,406 patent/US10191261B2/en active Active
- 2015-08-06 EP EP15829549.3A patent/EP3177956B1/en active Active
- 2015-08-06 AU AU2015300980A patent/AU2015300980B2/en not_active Ceased
-
2017
- 2017-09-15 AU AU2017228683A patent/AU2017228683A1/en not_active Abandoned
-
2019
- 2019-06-12 AU AU2019204093A patent/AU2019204093B2/en not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63208817A (ja) * | 1987-02-25 | 1988-08-30 | Canon Inc | 屈折力可変レンズを有した変倍光学系 |
| JPH0338608A (ja) * | 1989-07-05 | 1991-02-19 | Asahi Optical Co Ltd | 変倍光学系 |
| JP2007094170A (ja) * | 2005-09-29 | 2007-04-12 | Nikon Corp | 正立変倍アフォーカル光学系 |
| JP2008203652A (ja) * | 2007-02-21 | 2008-09-04 | Nikon Corp | 実像式変倍アフォーカル光学系 |
| US20100157438A1 (en) * | 2008-12-18 | 2010-06-24 | Bae Systems Plc | Fluidic lens |
| JP2010276716A (ja) * | 2009-05-26 | 2010-12-09 | Sony Corp | 酸化膜の形成方法、エレクトロウェッティング装置、液体レンズ装置、液滴装置、光学素子、ズームレンズ、撮像装置、光変調装置、表示装置及びストロボ装置 |
| US20120307384A1 (en) * | 2011-06-01 | 2012-12-06 | Hong Kong Applied Science And Technology Research Institute Co., Ltd. | Deformable lens assembly |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023545608A (ja) * | 2021-01-21 | 2023-10-31 | コネクサス レンズ, インク. | 変形可能レンズの表面の圧平の変化中に変形可能レンズに複数の焦点が形成されることによる効果の低減 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106662730B (zh) | 2020-01-10 |
| AU2019204093B2 (en) | 2020-07-16 |
| AU2019204093A1 (en) | 2019-07-04 |
| CN106662730A (zh) | 2017-05-10 |
| KR20170042659A (ko) | 2017-04-19 |
| MX367086B (es) | 2019-08-05 |
| JP6475834B2 (ja) | 2019-02-27 |
| MX2017001542A (es) | 2017-05-19 |
| CA2957658C (en) | 2019-03-26 |
| WO2016022771A1 (en) | 2016-02-11 |
| US20170235113A1 (en) | 2017-08-17 |
| AU2015300980B2 (en) | 2017-09-21 |
| US10191261B2 (en) | 2019-01-29 |
| EP3177956A1 (en) | 2017-06-14 |
| CA2957658A1 (en) | 2016-02-11 |
| EP3177956B1 (en) | 2020-12-23 |
| KR102274385B1 (ko) | 2021-07-06 |
| AU2017228683A1 (en) | 2017-10-12 |
| AU2015300980A1 (en) | 2017-02-09 |
| EP3177956A4 (en) | 2018-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6475834B2 (ja) | マクロレンズ | |
| US7755840B2 (en) | Fluidic optical devices | |
| CN109324388B (zh) | 投影镜头系统、投影装置、感测模块及电子装置 | |
| JP7063921B6 (ja) | 光学式手ぶれ補正およびフォーカス調整のためのレンズアセンブリ | |
| JP6305379B2 (ja) | 光学システム | |
| CN105093472B (zh) | 成像装置和成像方法 | |
| US20110038028A1 (en) | Optical Imaging Lens systems and components | |
| CN114063268A (zh) | 影像撷取透镜系统、取像装置及电子装置 | |
| JP2004247947A (ja) | 光学装置 | |
| JP2003098435A (ja) | ズーム光学系 | |
| JP2017526986A5 (ja) | ||
| JP2000249813A (ja) | 可変焦点レンズ | |
| Zhang et al. | Focal length tunable fluidic adaptive lens | |
| CN118962874A (zh) | 一种基于波前像差理论的液体变焦镜片 | |
| CN116615682A (zh) | 减少在表面压平变化中由可变形透镜中多个焦点的形成引起的影响 | |
| HK40029653A (en) | Lens assembly for optical image stabilization and focus adjustment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170317 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180801 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180801 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181227 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190111 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190121 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190201 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6475834 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |