JP2017529536A - 磁気センサにおける磁気干渉を能動的に平衡化し/打ち消すシステム及び方法 - Google Patents
磁気センサにおける磁気干渉を能動的に平衡化し/打ち消すシステム及び方法 Download PDFInfo
- Publication number
- JP2017529536A JP2017529536A JP2017515745A JP2017515745A JP2017529536A JP 2017529536 A JP2017529536 A JP 2017529536A JP 2017515745 A JP2017515745 A JP 2017515745A JP 2017515745 A JP2017515745 A JP 2017515745A JP 2017529536 A JP2017529536 A JP 2017529536A
- Authority
- JP
- Japan
- Prior art keywords
- stator
- magnetic field
- magnet
- magnetic
- sensing system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0017—Means for compensating offset magnetic fields or the magnetic flux to be measured; Means for generating calibration magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24428—Error prevention
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/007—Environmental aspects, e.g. temperature variations, radiation, stray fields
- G01R33/0076—Protection, e.g. with housings against stray fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/025—Compensating stray fields
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Electromagnetism (AREA)
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Environmental & Geological Engineering (AREA)
- Toxicology (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Abstract
Description
Claims (17)
- 感知システムにおいて、
第一の磁界を有する第一の磁石と、
第一の磁界を受け取る形態とされた第一の固定子と、
第一の磁界を受け取る形態とされた第二の固定子と、
該第一の固定子から第一の磁界を集める形態とされた第一のコレクタと、
該第二の固定子から第一の磁界を集める形態とされた第二のコレクタと、
第一の磁界を感知する形態とされた磁気感知要素と、
第二の磁界を有する第二の磁石と、
第三の磁界を有する第三の磁石であって、該第三の磁界が前記第二の磁界に対して対称であるように配置された前記第三の磁石と、を備える、感知システム。 - 請求項1に記載の感知システムにおいて、
前記第一の磁石は、第一の磁気センサの一部であり、前記第二の磁石は、第二の磁気センサの一部である、感知システム。 - 請求項1に記載の感知システムにおいて、
前記第三の磁界は、前記磁気感知要素の位置にて前記第二の磁界を打ち消す、感知システム。 - 請求項1に記載の感知システムにおいて、
前記第一の磁石と結合された入力シャフトと、前記第一の固定子及び第二の固定子と結合された出力シャフトとを更に備える、感知システム。 - 請求項4に記載の感知システムにおいて、
前記磁気感知要素は、前記入力シャフトと前記出力シャフトとの間のトルクと関係した磁界を感知する形態とされる、感知システム。 - 請求項4に記載の感知システムにおいて、
前記磁気感知要素は、前記入力シャフトと前記出力シャフトとの間の位置と関係した磁界を感知する形態とされる、感知システム。 - 請求項1に記載の感知システムにおいて、
前記第二の磁界を受け取る形態とされた第三の固定子と、
前記第二の磁界を受け取る形態とされた第四の固定子と、
該第三の固定子から前記第二の磁界を集める形態とされた第三のコレクタと、
該第四の固定子から前記第二の磁界を集める形態とされた第四のコレクタと、
前記第二の磁界を感知する形態とされた第二の磁気感知要素と、を更に備える、感知システム。 - 請求項1に記載の感知システムにおいて、
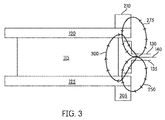
前記第一の磁石は、前記第一の固定子の第一の側部に隣接し、かつ前記第二固定子の第一の側部に隣接する位置に配置され、
前記第二の磁石は、前記第一の固定子の第二の側部に隣接する位置に配置され、
前記第三の磁石は、前記第二の固定子の第二の側部に隣接する位置に配置される、感知システム。 - 請求項1に記載の感知システムにおいて、
前記第一の磁石は、前記第二の固定子から最も離れた前記第一の固定子の表面と、前記第一の固定子から軸方向に最も離れた前記第二の固定子の表面との間にて軸方向に配置される、感知システム。 - 請求項9に記載の感知システムにおいて、
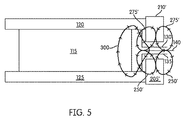
前記第二の磁石は、半径方向に向けて前記第二の固定子の外周に隣接する位置に配置され、
前記第三の磁石は、半径方向に向けて前記第一の固定子の外周に隣接する位置に配置される、感知システム。 - 感知システムにおいて、
第一の磁気センサであって、
第一の磁界を有する第一の磁石と、
第一の磁界を受け取る形態とされた第一の固定子と、
第一の磁界を受け取る形態とされた第二の固定子と、
該第一の固定子から第一の磁界を集める形態とされた第一のコレクタと、
該第二の固定子から第一の磁界を集める形態とされた第二のコレクタと、
第一の磁界を感知する形態とされた磁気感知要素とを含む前記第一の磁気センサと、
第二の磁界を有する第二の磁石であって、前記第一の固定子及び前記第二の固定子が同様の量の第二の磁界を受け取るように配置された、前記第二の磁石と、を備える、感知システム。 - 請求項11に記載の感知システムにおいて、
前記第二の磁石は、第二の磁気センサの一部である、感知システム。 - 感知システムの磁界を感知する方法において、
第一の磁石により第一の磁界を提供するステップと、
第一の固定子により前記第一の磁界の少なくとも一部分を受け取るステップと、
第二の固定子により前記第一の磁界の少なくとも一部分を受け取るステップと、
第一のコレクタにより前記第一の固定子から前記第一の磁界の少なくとも一部分を集めるステップと、
第二のコレクタにより前記第二の固定子から前記第一の磁界の少なくとも一部分を集めるステップと、
第二の磁石から第二の磁界を受け取るステップと、
第三の磁界を有する第三の磁石を配置するステップであって、前記第三の磁界が前記第二の磁界に対して対称である、前記第三の磁石を配置するステップと、を備える方法。 - 請求項13に記載の方法において、
前記第三の磁石を配置するステップは、前記第三の磁界が前記磁気感知要素にて前記第二の磁界を打ち消すステップを含む、方法。 - 請求項13に記載の方法において、
前記第一の磁石を前記第一の固定子の第一の側部に隣接し、かつ前記第二の固定子の第一の側部に隣接する第一の位置に配置するステップと、
前記第二の磁石を前記第一の固定子の第二の側部に隣接する第二の位置に配置するステップと、
前記第三の磁石を前記第二の固定子の第二の側部に隣接する第三の位置に配置するステップと、を備える、方法。 - 請求項13に記載の方法において、
軸方向に向けて前記第二の固定子から最も離れた前記第一の固定子の表面と前記第一の固定子から軸方向に最も離れた前記第二の固定子の表面との間にて前記第一の磁石を軸方向に配置するステップを更に備える、方法。 - 請求項16に記載の方法において、
前記第二の磁石を半径方向に向けて前記第二の固定子の外周に隣接する第二の位置に配置するステップと、
前記第三の磁石を半径方向に向けて前記第一の固定子の外周に隣接する第三の位置に配置するステップと、を更に備える方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462055791P | 2014-09-26 | 2014-09-26 | |
| US62/055,791 | 2014-09-26 | ||
| PCT/US2015/052161 WO2016049423A2 (en) | 2014-09-26 | 2015-09-25 | System and method for active balancing/cancellation of magnetic interference in a magnetic sensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017529536A true JP2017529536A (ja) | 2017-10-05 |
| JP6590915B2 JP6590915B2 (ja) | 2019-10-16 |
Family
ID=55582255
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017515745A Expired - Fee Related JP6590915B2 (ja) | 2014-09-26 | 2015-09-25 | 磁気センサにおける磁気干渉を能動的に平衡化し/打ち消すシステム及び方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10302710B2 (ja) |
| EP (1) | EP3198230B1 (ja) |
| JP (1) | JP6590915B2 (ja) |
| KR (1) | KR102198156B1 (ja) |
| CN (1) | CN107110664B (ja) |
| WO (1) | WO2016049423A2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10591320B2 (en) * | 2017-12-11 | 2020-03-17 | Nxp B.V. | Magnetoresistive sensor with stray field cancellation and systems incorporating same |
| DE102018119807A1 (de) | 2018-08-15 | 2020-02-20 | Valeo Schalter Und Sensoren Gmbh | Drehmomentsensorvorrichtung, Verfahren zum Bestimmen eines Drehmoments, Stator und Statoranordnung |
| EP3754356B1 (en) * | 2019-06-21 | 2023-07-26 | Melexis Technologies SA | Stray-field-immune magnetic field sensor arrangement, magnetic torque sensor arrangement and method for determining a magnetic flux |
| US20230038153A1 (en) * | 2019-12-23 | 2023-02-09 | Lg Innotek Co., Ltd. | Sensing device |
| EP4242616B1 (de) | 2020-08-26 | 2025-04-02 | Valeo Schalter und Sensoren GmbH | Drehmomentsensorvorrichtung, flussleiteranordnung und flussleiter |
| KR20230001179A (ko) * | 2021-06-28 | 2023-01-04 | 엘지이노텍 주식회사 | 센싱 장치 |
| WO2023059052A1 (ko) * | 2021-10-07 | 2023-04-13 | 엘지이노텍 주식회사 | 센싱 장치 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4204294B2 (ja) * | 2002-09-30 | 2009-01-07 | 株式会社日本自動車部品総合研究所 | 回転角検出装置 |
| US20110167920A1 (en) * | 2008-07-14 | 2011-07-14 | Continental Teves Ag & Co. Ohg | Torque sensor arrangement with rotational angle index detection |
| JP2011209005A (ja) * | 2010-03-29 | 2011-10-20 | Hitachi Cable Ltd | トルクインデックスセンサ |
| JP4877715B2 (ja) * | 2005-09-28 | 2012-02-15 | 株式会社ジェイテクト | トルク検出装置及びこれを用いた電動パワーステアリング装置 |
| JP2012058195A (ja) * | 2010-09-13 | 2012-03-22 | Hitachi Cable Ltd | トルクインデックスセンサ |
| JP5056310B2 (ja) * | 2007-09-26 | 2012-10-24 | 株式会社ジェイテクト | トルク検出装置 |
| JP5193110B2 (ja) * | 2009-03-31 | 2013-05-08 | 日立電線株式会社 | トルク・インデックスセンサ |
| JP5229642B2 (ja) * | 2010-08-06 | 2013-07-03 | 株式会社デンソー | モータ、および、それを用いた電動パワーステアリング装置 |
| JP5675700B2 (ja) * | 2012-05-25 | 2015-02-25 | 株式会社日本自動車部品総合研究所 | トルクセンサ |
| JP6042667B2 (ja) * | 2011-11-29 | 2016-12-14 | エルジー イノテック カンパニー リミテッド | トルクセンサ |
| JP6327456B2 (ja) * | 2014-05-19 | 2018-05-23 | 株式会社ジェイテクト | トルクセンサ及び電動パワーステアリング装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3287713A (en) | 1962-10-12 | 1966-11-22 | Philco Corp | Magnetic recording heads utilizing symmetrical windings to avoid cross talk |
| JPS59142719A (ja) | 1983-02-03 | 1984-08-16 | Fujitsu Ltd | 薄膜ヘツド |
| DE3713304A1 (de) * | 1987-04-18 | 1988-11-03 | Heldt & Rossi Servoelektronik | Einrichtung zur drehwinkel-positionsbestimmung bei drehantrieben |
| GB9924046D0 (en) * | 1999-10-11 | 1999-12-15 | Fast Technology Gmbh | Torque measurement apparatus |
| JP3583671B2 (ja) * | 1999-10-29 | 2004-11-04 | 三菱電機株式会社 | トルク検出装置 |
| US7350425B2 (en) * | 2005-09-22 | 2008-04-01 | Continental Automotive Systems Us, Inc. | Method of eliminating hysteresis from a magnetoelastic torque sensor |
| JP2009511894A (ja) | 2005-10-12 | 2009-03-19 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 磁場補償のある磁気センサー装置 |
| WO2007060568A2 (en) | 2005-11-23 | 2007-05-31 | Koninklijke Philips Electronics N. V. | Magnetic sensor device with sample chamber |
| EP2030033A1 (en) | 2006-05-30 | 2009-03-04 | Koninklijke Philips Electronics N.V. | Sensor device with adaptive field compensation |
| JP2010500594A (ja) | 2006-08-15 | 2010-01-07 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 磁気センサ装置 |
| US7726208B2 (en) | 2006-11-22 | 2010-06-01 | Zf Friedrichshafen Ag | Combined steering angle and torque sensor |
| KR101285518B1 (ko) | 2009-07-15 | 2013-07-17 | 주식회사 만도 | 토크 앵글 센서 및 이를 구비한 전동식 조향장치 |
| KR101650455B1 (ko) * | 2009-11-20 | 2016-08-23 | 엘지이노텍 주식회사 | 차량의 조향토크 및 조향각 검출장치 |
| KR101637597B1 (ko) * | 2010-07-27 | 2016-07-07 | 엘지이노텍 주식회사 | 자계차폐구조를 가진 토크 인덱스 센서 |
| US9062989B2 (en) | 2010-12-15 | 2015-06-23 | Nxp B.V. | Magnetic field sensor for sensing rotation a reference component about the axis of rotation that is independent of alignment between the axis of rotation and the sensors |
| DE102011106433B4 (de) | 2011-07-04 | 2016-10-13 | Integrated Dynamics Engineering Gmbh | Integrierbare Magnetfeldkompensation für den Einsatz an Raster- und Transmissionselektronenmikroskopen, Schwingungsisolationssystem sowie Verfahren zum Abbilden, Untersuchen und / oder Bearbeiten einer Probe |
| US9494556B2 (en) | 2012-01-13 | 2016-11-15 | Polyresearch Ag | Active mechanical force and axial load sensor |
| JP6244632B2 (ja) * | 2013-02-26 | 2017-12-13 | 株式会社ジェイテクト | 回転角度検出装置 |
| CN203490330U (zh) | 2013-09-10 | 2014-03-19 | 国家电网公司 | 电容器局放耦合消噪传感器 |
-
2015
- 2015-09-25 EP EP15844184.0A patent/EP3198230B1/en active Active
- 2015-09-25 US US14/865,282 patent/US10302710B2/en active Active
- 2015-09-25 WO PCT/US2015/052161 patent/WO2016049423A2/en not_active Ceased
- 2015-09-25 CN CN201580049666.9A patent/CN107110664B/zh not_active Expired - Fee Related
- 2015-09-25 KR KR1020177007856A patent/KR102198156B1/ko not_active Expired - Fee Related
- 2015-09-25 JP JP2017515745A patent/JP6590915B2/ja not_active Expired - Fee Related
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4204294B2 (ja) * | 2002-09-30 | 2009-01-07 | 株式会社日本自動車部品総合研究所 | 回転角検出装置 |
| JP4877715B2 (ja) * | 2005-09-28 | 2012-02-15 | 株式会社ジェイテクト | トルク検出装置及びこれを用いた電動パワーステアリング装置 |
| JP5056310B2 (ja) * | 2007-09-26 | 2012-10-24 | 株式会社ジェイテクト | トルク検出装置 |
| US20110167920A1 (en) * | 2008-07-14 | 2011-07-14 | Continental Teves Ag & Co. Ohg | Torque sensor arrangement with rotational angle index detection |
| JP5193110B2 (ja) * | 2009-03-31 | 2013-05-08 | 日立電線株式会社 | トルク・インデックスセンサ |
| JP2011209005A (ja) * | 2010-03-29 | 2011-10-20 | Hitachi Cable Ltd | トルクインデックスセンサ |
| JP5514603B2 (ja) * | 2010-03-29 | 2014-06-04 | 日立金属株式会社 | トルクインデックスセンサ |
| JP5229642B2 (ja) * | 2010-08-06 | 2013-07-03 | 株式会社デンソー | モータ、および、それを用いた電動パワーステアリング装置 |
| JP2012058195A (ja) * | 2010-09-13 | 2012-03-22 | Hitachi Cable Ltd | トルクインデックスセンサ |
| JP5480758B2 (ja) * | 2010-09-13 | 2014-04-23 | 日立金属株式会社 | トルクインデックスセンサ |
| JP6042667B2 (ja) * | 2011-11-29 | 2016-12-14 | エルジー イノテック カンパニー リミテッド | トルクセンサ |
| JP5675700B2 (ja) * | 2012-05-25 | 2015-02-25 | 株式会社日本自動車部品総合研究所 | トルクセンサ |
| JP6327456B2 (ja) * | 2014-05-19 | 2018-05-23 | 株式会社ジェイテクト | トルクセンサ及び電動パワーステアリング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6590915B2 (ja) | 2019-10-16 |
| US10302710B2 (en) | 2019-05-28 |
| EP3198230A2 (en) | 2017-08-02 |
| KR20170059442A (ko) | 2017-05-30 |
| CN107110664A (zh) | 2017-08-29 |
| EP3198230B1 (en) | 2023-04-12 |
| US20160091574A1 (en) | 2016-03-31 |
| EP3198230A4 (en) | 2018-05-16 |
| WO2016049423A2 (en) | 2016-03-31 |
| WO2016049423A3 (en) | 2017-05-04 |
| CN107110664B (zh) | 2020-03-17 |
| KR102198156B1 (ko) | 2021-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6590915B2 (ja) | 磁気センサにおける磁気干渉を能動的に平衡化し/打ち消すシステム及び方法 | |
| US9347843B2 (en) | Low-height sensor for measuring torque angle | |
| US8984964B2 (en) | Torque measurement device | |
| CN105270467B (zh) | 扭矩传感器以及电动动力转向装置 | |
| CN104515635B (zh) | 转矩转位传感器 | |
| CN104457552B (zh) | 旋转角检测装置 | |
| JP5375796B2 (ja) | 回転角検出装置、および、これを用いた電動パワーステアリング装置 | |
| US10928221B2 (en) | Magnetic sensor arrangement and magnetic sensing method | |
| US9267817B2 (en) | Rotation angle detection device | |
| CN206583463U (zh) | 多转角度位置传感器 | |
| CN107856740A (zh) | 一种方向盘转向角度的计算方法和系统 | |
| CN108027253B (zh) | 无刷旋转变压器及旋转角度检测装置 | |
| CN105865492B (zh) | 两轴磁强计在线误差补偿方法及系统 | |
| CN202276311U (zh) | 基于磁环及霍尔传感器的pet-ct机轮毂电机位置检测装置 | |
| JP2008241589A (ja) | トルクセンサ装置 | |
| JP6961222B2 (ja) | 歪みセンサのステータ構造 | |
| JP7002577B2 (ja) | 角度検出装置及び回転電機の制御装置 | |
| CN111602030B (zh) | 旋转角度检测装置 | |
| JP5948656B2 (ja) | 回転角検出装置 | |
| JP2011136401A (ja) | スピンドル装置 | |
| JP2021071463A (ja) | 磁気式エンコーダの軸構造、ディスクユニット、および磁気式エンコーダ | |
| JP2004354327A (ja) | トルクセンサ | |
| JP2008267856A (ja) | トルク検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190529 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190823 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190917 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6590915 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |