JP2017534475A - ソフトロボットアクチュエータの向上 - Google Patents
ソフトロボットアクチュエータの向上 Download PDFInfo
- Publication number
- JP2017534475A JP2017534475A JP2017527656A JP2017527656A JP2017534475A JP 2017534475 A JP2017534475 A JP 2017534475A JP 2017527656 A JP2017527656 A JP 2017527656A JP 2017527656 A JP2017527656 A JP 2017527656A JP 2017534475 A JP2017534475 A JP 2017534475A
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- actuators
- soft robot
- soft
- gripping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/12—Gripping heads and other end effectors having finger members with flexible finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0023—Gripper surfaces directly activated by a fluid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/14—Program-controlled manipulators characterised by positioning means for manipulator elements fluid
- B25J9/142—Program-controlled manipulators characterised by positioning means for manipulator elements fluid comprising inflatable bodies
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/08—Characterised by the construction of the motor unit
- F15B15/10—Characterised by the construction of the motor unit the motor being of diaphragm type
- F15B15/103—Characterised by the construction of the motor unit the motor being of diaphragm type using inflatable bodies that contract when fluid pressure is applied, e.g. pneumatic artificial muscles or McKibben-type actuators
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- General Engineering & Computer Science (AREA)
- Manipulator (AREA)
- Actuator (AREA)
Abstract
Description
本出願は、「Soft Robotic Actuator Attachment Hub and Grasper Assembly,Reinforced Actuators,and Electroadhesive Actuators」と題され、2015年9月17日に出願された、米国特許出願番号14/857,648の一部継続出願である。本出願はまた、その内容が参照により本明細書中に援用される、「Soft Robotic Actuator Enhancements」と題され、2014年11月18日に出願された、米国特許出願番号62/081,323への優先権を主張する。
本開示は、概してロボット工学の分野に関係し、特に、ソフトロボットアクチュエータを別の機械式システムとインターフェイス接続するためのハブおよびアセンブリ、ならびにソフトロボットアクチュエータシステムのための向上に関係する。
ロボット工学は、産業用の適用(例えば、製造および包装)ならびに医療用の適用などの多くの産業で使用されている。ソフトロボット工学は、ソフトで、適合性があり、適応性がある掴握部およびアクチュエータを提供し、ロボットが従来のロボット工学においてよりも適応性のある態様で物体と相互作用することを可能とする、ロボット工学の開発中の領域である。例えば、単一の掴握部は、ちょうど人間の手ができるように、各タスクにおける様々な物体の大きさ、重さおよび形状に適応し得る。
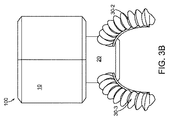
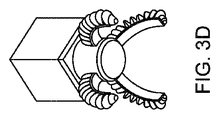
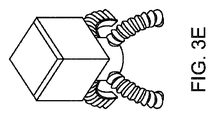
例示的な実施形態によると、角度調整システムが、アクチュエータとハブとの間または2つのアクチュエータ間の角度を変更するために提供される。角度調整システムはまた、アクチュエータ間の相対距離または離間を変更するために使われ得る。そのようなシステムは、ロボットマニピュレータが、個々のアクチュエータまたはマニピュレータ全体を取り替える必要なしに、動的に調整されることを可能にする。したがって、マニピュレータは、様々な大きさおよび形状の物体を掴握するために変更され得る。
ここで、本発明は、本発明の好ましい実施形態が示される添付の図面を参照して、以下でさらに十分に記載される。しかし、本発明は、多くの異なる形態で具体化され得、本明細書中で説明された実施形態に限定されると解釈されるべきではない。むしろ、これらの実施形態は、本開示が、綿密かつ完全であり、本発明の範囲を当業者に十分に伝えるように、提供される。図面では、全体を通して同じ数字が同じ要素を指す。
旧来のロボットの把持部またはアクチュエータは、高価であり得、取り扱い対象の物体の重さ、大きさおよび形状の不確定性および多様性が自動化されたソリューションが稼働することをこれまで妨げてきた特定の環境において動作することができなくあり得る。本出願は、適応性があり、安価で、軽量で、カスタマイズ可能で、かつ使うことが簡単な、新規なソフトロボットアクチュエータの適用を記載する。
調整可能なハブは、アクチュエータの、ピッチの広がり、数または種類を作動させられることまたは調整されることを可能にし得る。そのようなハブは、アクチュエータの角度が互いに対して変えられることを可能とし得るか、アクチュエータが互いに対して線形的に移動させられ、それによってアクチュエータ間の離間を調整することを可能とし得る。これらのパラメータの調整は、制御デバイスを使って自動で、またはオペレータによる操作に応じて手動で行われ得る。(自動または手動調整の)いずれの場合でも、調整は、アクチュエータをハブから取り除く必要、またはアクチュエータを異なる特徴を有する異なるアクチュエータと取り替える必要なく、動的に行われ得る。
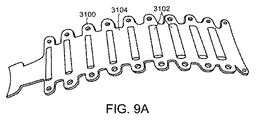
さらなる実施形態が、スラットなどの、1つまたはそれより多くの剛性の構成要素を組み込む、異方性の補強ベースを提供する。構成要素は、金属、プラスチックまたは任意の他の適切に剛性の材料から作られ得る。剛性の構成要素は、圧力が印加されるときにアクチュエータが正方向に(把持された物体に向かって)曲がることをより難しくする歪み制限層において曲折するのを妨げるために、アクチュエータ内に直接、ストラップで付けられ得るか、包まれ得るか、接着され得るか、成形され得る。剛性の構成要素はまた、真空が印加されるときに負方向に曲がるのを難しくする把持表面のキャビテーションを妨げるように機能する。この場合、剛性の構成要素は、キャビテーションする表面がスラットから離れていくのを妨げるために、フィンガ内に成形またはフィンガ上に接着され得る。
次に記載されるのは力増幅構造であり、力増幅構造は、そのような力増幅構造を採用しないアクチュエータと比べて、膨張したアクチュエータの遠位先端部での力を増幅するためのものである。
いくつかの実施形態では、ソフトロボットアクチュエータは、アクチュエータの把持プロファイルをカスタマイズするために、1つまたはそれより多くの把持構造とともに設計され得るか、1つまたはそれより多くの把持構造で補われ得る。これは、アクチュエータが、把持される表面によりよく適合することを可能とし得るか、アクチュエータの把持性能を向上させる構造またはテクスチャを有することを可能とし得る。
本明細書中で使われているように、単数形で記載された要素またはステップおよび「a」または「an」という語が先行した(proceeded)要素またはステップは、複数の要素またはステップを除外しないものと、そのような除外が明示的に記載されない限り、理解されるべきである。さらに、本発明の「ある実施形態」への言及は、記載された特色をも組み込む追加の実施形態の存在を除外すると解釈されることを意図したものではない。
Claims (20)
- 装置であって、該装置は、
1つまたはそれより多くのソフトロボットアクチュエータであって、該ソフトロボットアクチュエータは、エラストマー材料を含む中空の本体を備え、該中空の本体は、膨張流体を受容するように構成される、ソフトロボットアクチュエータと、
該1つまたはそれより多くのソフトロボットアクチュエータに接続するためのインターフェイスを備えるハブと、
該1つもしくはそれより多くのソフトロボットアクチュエータの角度を、該ハブに対してもしくは互いに対して調整するための角度調整デバイス、または、該1つもしくはそれより多くのソフトロボットアクチュエータの位置を、該ハブに対してもしくは互いに対して調整するための角度調整デバイスと
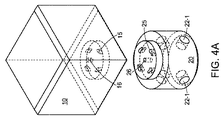
を備える、装置。 - 前記角度調整デバイスは、アクチュエータを取り付けるためのインターフェイスを有する回転可能な構成要素を備え、該回転可能な構成要素は、該取り付けられたアクチュエータと前記ハブとの間の相対角度を変えるために該ハブに対して回転する、請求項1に記載の装置。
- 前記角度調整デバイスは、前記1つまたはそれより多くのソフトロボットアクチュエータに隣接して配置される1つまたはそれより多くのソフト角度調整器を備え、該ソフト角度調整器は、該ソフトロボットアクチュエータ間の角度を変更するために該ソフトロボットアクチュエータとは独立して膨張させられるように構成される、請求項1に記載の装置。
- 前記1つまたはそれより多くのアクチュエータは、少なくとも2つのアクチュエータを含み、前記角度調整デバイスは、該少なくとも2つのアクチュエータの前記角度を独立して調整するように構成される、請求項1に記載の装置。
- 前記1つまたはそれより多くのアクチュエータは、少なくとも2つのアクチュエータを含み、前記角度調整デバイスは、該少なくとも2つのアクチュエータの前記角度を独立して調整するように構成される、請求項1に記載の装置。
- 装置であって、該装置は、
1つまたはそれより多くのソフトロボットアクチュエータであって、該ソフトロボットアクチュエータは、エラストマー材料を含む中空の本体を備え、該中空の本体は、膨張流体を受容するように構成され、該ソフトロボットアクチュエータのそれぞれは、遠位端および近位端を有する、ソフトロボットアクチュエータと、
少なくとも部分的に該1つまたはそれより多くのアクチュエータの周りに提供される力増幅デバイスであって、該力増幅デバイスは、該力増幅デバイスを採用しないアクチュエータと比べて、1つまたはそれより多くのアクチュエータの該遠位端において加えられる力を増幅するように構成される、力増幅デバイスと
を備える、装置。 - 前記力増幅デバイスは、前記1つまたはそれより多くのソフトロボットアクチュエータを前記近位端と前記遠位端との間の位置で少なくとも部分的に取り囲むバンドを備える、請求項6に記載の装置。
- 前記力増幅デバイスは、前記1つまたはそれより多くのソフトロボットアクチュエータを前記近位端と前記遠位端との間の位置で少なくとも部分的に取り囲むカフまたは蛇腹を備える、請求項6に記載の装置。
- 前記カフまたは蛇腹は、長手方向に拡張可能な長さを有し、該カフまたは蛇腹の該長さを調整することは、前記1つまたはそれより多くのソフトロボットアクチュエータの前記遠位端で加えられる力の量を変える、請求項8に記載の装置。
- 前記力増幅デバイスは、前記1つまたはそれより多くのソフトロボットアクチュエータを前記近位端と前記遠位端との間の位置で少なくとも部分的に取り囲む可撓性または伸縮性のストラップを備える、請求項6に記載の装置。
- 装置であって、該装置は、
ソフトロボットアクチュエータであって、該ソフトロボットアクチュエータは、エラストマー材料を含む中空の本体および歪み制限層を備え、該中空の本体は、膨張流体を受容するように構成され、該ソフトロボットアクチュエータは、曲がることの中立軸を有する、ソフトロボットアクチュエータと、
該歪み制限層に隣接して、または、該歪み制限層と一体で提供される剛化層であって、該剛化層は、該曲がることの中立軸に対して垂直に配向される1つまたはそれより多くの剛性の構成要素を備える、剛化層と
を備える、装置。 - 前記剛性の構成要素は、前記歪み制限層内に成形される複数の剛性のスラットを備える、請求項11に記載の装置。
- 前記複数の剛性のスラットは、互いに対して平行に配向される、請求項12に記載の装置。
- 前記1つまたはそれより多くの剛性の構成要素は、真空がアクチュエータに印加されるときに、該アクチュエータの掴握側がキャビテーションすることまたは凹状になることを妨げるように構成される、請求項11に記載の装置。
- 前記剛化層は、アクチュエータの掴握しない側上の1つまたはそれより多くの谷にわたって延在する1つまたはそれより多くのレース、ストラップ、リングまたはコードで該アクチュエータに固定される、請求項11に記載の装置。
- 装置であって、該装置は、
ソフトロボットアクチュエータであって、該ソフトロボットアクチュエータは、エラストマー材料を含む中空の本体を備え、該中空の本体は、膨張流体を受容するように構成される、ソフトロボットアクチュエータと、
物体を掴握するために構成される、該ソフトロボットアクチュエータの側に隣接して、または、該ソフトロボットアクチュエータの側と一体で提供される把持構造であって、該把持構造は、該把持構造を欠いているソフトロボットアクチュエータと比べて該アクチュエータの把持を強める形状またはテクスチャを有する、把持構造と
を備える、装置。 - 前記把持構造は、適合性のあるパッドであり、該適合性のあるパッドは、前記アクチュエータが加圧されないときに実質的に凸状であり、該アクチュエータが加圧されるときに実質的に平らである、請求項16に記載の装置。
- 前記装置は、複数のアクチュエータを備え、該アクチュエータのうちの少なくとも2つは異なる把持構造を有する、請求項16に記載の装置。
- 前記ソフトロボットアクチュエータは、該アクチュエータの掴握側上の異なる位置で提供される複数の異なる把持表面を備える、請求項16に記載の装置。
- 前記把持構造は、1本またはそれより多くの針を備える、請求項16に記載の装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462081323P | 2014-11-18 | 2014-11-18 | |
| US62/081,323 | 2014-11-18 | ||
| US14/857,648 US10118301B2 (en) | 2014-09-17 | 2015-09-17 | Soft robotic actuator attachment hub and grasper assembly, reinforced actuators, and electroadhesive actuators |
| US14/857,648 | 2015-09-17 | ||
| PCT/US2015/061352 WO2016081605A1 (en) | 2014-11-18 | 2015-11-18 | Soft robotic actuator enhancements |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017534475A true JP2017534475A (ja) | 2017-11-24 |
| JP6775502B2 JP6775502B2 (ja) | 2020-10-28 |
Family
ID=56014514
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017527656A Active JP6775502B2 (ja) | 2014-11-18 | 2015-11-18 | ソフトロボットアクチュエータの向上 |
Country Status (6)
| Country | Link |
|---|---|
| EP (2) | EP3221583B1 (ja) |
| JP (1) | JP6775502B2 (ja) |
| CN (1) | CN107110130B (ja) |
| AU (1) | AU2015350006B2 (ja) |
| CA (1) | CA2968307C (ja) |
| WO (1) | WO2016081605A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200009443A (ko) * | 2018-07-19 | 2020-01-30 | 한양대학교 산학협력단 | 소프트 그리퍼 |
| WO2020115889A1 (ja) * | 2018-12-07 | 2020-06-11 | 圭治郎 山本 | ロボットハンド |
| JP2020168691A (ja) * | 2019-04-04 | 2020-10-15 | 学校法人立命館 | ソフトグリッパー |
| CN116690618A (zh) * | 2023-02-02 | 2023-09-05 | 江苏理工学院 | 一种双向平行腔室软体机械手 |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10569422B2 (en) | 2016-01-20 | 2020-02-25 | Soft Robotics, Inc. | End of arm tools for soft robotic systems |
| JP6815631B2 (ja) * | 2016-12-20 | 2021-01-20 | 学校法人立命館 | ロボットハンド |
| US11129766B2 (en) * | 2017-04-14 | 2021-09-28 | The Chinese University Of Hong Kong | Flexibly driven robotic hands |
| CN107902001B (zh) * | 2017-10-09 | 2019-09-27 | 上海交通大学 | 差动软体机器人 |
| EP3706964B1 (en) * | 2017-11-10 | 2023-06-28 | Soft Robotics, Inc. | End of arm tools for soft robotic systems |
| CN108272634A (zh) * | 2018-02-09 | 2018-07-13 | 刘卫国 | 一种针灸理疗装置 |
| CN108555944B (zh) * | 2018-03-27 | 2020-06-09 | 江苏大学 | 一种靠伸缩圈伸缩来抓取物体的软体触手 |
| US11090818B2 (en) | 2018-03-27 | 2021-08-17 | Soft Robotics, Inc. | Field-assembled soft gripping for industrial and collaborative robots |
| CN108501031B (zh) * | 2018-04-04 | 2021-01-19 | 任庆 | 一种夹持柔性机械手 |
| CN108568838A (zh) * | 2018-04-08 | 2018-09-25 | 西安交通大学 | 一种基于刚性约束的大负载柔性机械手 |
| CN108297117A (zh) * | 2018-04-24 | 2018-07-20 | 上海大学 | 气动果蔬采摘软体手 |
| CN109079753B (zh) * | 2018-08-02 | 2020-07-17 | 浙江大学 | 一种全柔性连续旋转执行器及其方法 |
| CN109676630B (zh) * | 2019-03-04 | 2022-03-15 | 西南科技大学 | 仿蛇缠绕软体执行器 |
| CN109940645B (zh) * | 2019-03-20 | 2023-12-29 | 中国地质大学(武汉) | 热膨胀流体复合非异形腔体驱动型机器人软体手 |
| CN110056721A (zh) * | 2019-04-26 | 2019-07-26 | 太原航空仪表有限公司 | 气动挠曲波纹管 |
| CN110000802A (zh) * | 2019-04-29 | 2019-07-12 | 南京理工大学 | 一种向心闭合式夹持机械爪 |
| CN110216705A (zh) * | 2019-06-25 | 2019-09-10 | 北京理工华汇智能科技有限公司 | 服务机器人机械手抓取系统 |
| CN110202599A (zh) * | 2019-06-25 | 2019-09-06 | 北京理工华汇智能科技有限公司 | 增力机构及夹持装置 |
| CN112659116B (zh) * | 2019-10-16 | 2024-05-03 | 中南大学 | 一种针对褶皱型软体致动器装置的建模方法 |
| CN111185930A (zh) * | 2020-01-16 | 2020-05-22 | 上海大学 | 刚度增强型软体抓手 |
| CN111135019A (zh) * | 2020-02-24 | 2020-05-12 | 合肥工业大学 | 一种囊指及手部康复训练器 |
| CN111319060B (zh) * | 2020-03-03 | 2021-03-26 | 清华大学 | 一种软体机器人抓持装置及抓持方法 |
| CN111791243A (zh) * | 2020-05-22 | 2020-10-20 | 国网安徽省电力有限公司电力科学研究院 | 一种面向非结构化场景的机器人抓附机构及机器人 |
| CN111923082B (zh) * | 2020-08-06 | 2021-11-02 | 上海海事大学 | 一种仿象鼻结构柔性抓取装置 |
| CN113532726B (zh) * | 2021-07-22 | 2024-05-31 | 深圳技术大学 | 一种多材料柔性仿生义指系统及其设计方法 |
| CN114952801B (zh) * | 2022-07-04 | 2024-07-16 | 杭州电子科技大学 | 一种五向灵巧探索机器人及其行进方法 |
| WO2026003748A1 (en) * | 2024-06-27 | 2026-01-02 | Scuola Superiore Sant'anna | Artificial wrist |
| DE102024129066A1 (de) | 2024-10-09 | 2026-04-09 | Berliner Hochschule für Technik, Körperschaft des öffentlichen Rechts | Passiv deformierbare Materialkomponente zur Positionierung an einem Endeffektor |
Citations (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3343864A (en) * | 1965-10-07 | 1967-09-26 | James I Baer | Material handling apparatus and the like |
| JPS4916165A (ja) * | 1972-06-07 | 1974-02-13 | ||
| JPS4916164A (ja) * | 1972-06-07 | 1974-02-13 | ||
| JPS5123956A (ja) * | 1974-05-30 | 1976-02-26 | Freudenberg Carl | |
| JPS58500112A (ja) * | 1981-02-24 | 1983-01-20 | キヤタピラ− トラツクタ− カンパニイ | クランプ組立体 |
| JPS5924310U (ja) * | 1982-08-04 | 1984-02-15 | 月星化成株式会社 | 掴み具 |
| JPS6199494U (ja) * | 1984-12-06 | 1986-06-25 | ||
| JPH08300284A (ja) * | 1995-05-09 | 1996-11-19 | Kubota Corp | ロボットハンド用指 |
| JPH08300288A (ja) * | 1995-05-09 | 1996-11-19 | Kubota Corp | ロボットハンド |
| JPH09109077A (ja) * | 1995-10-12 | 1997-04-28 | Kubota Corp | ロボットハンド用指 |
| JP2003343513A (ja) * | 2002-05-30 | 2003-12-03 | Seiko Epson Corp | フレキシブルアクチュエータ |
| WO2004000508A1 (ja) * | 2002-06-24 | 2003-12-31 | Matsushita Electric Industrial Co., Ltd. | 多関節駆動機構及びその製造方法、それを用いた把持ハンドとロボット |
| US6846029B1 (en) * | 2001-08-09 | 2005-01-25 | Gary Dean Ragner | Torus-shaped mechanical gripper |
| JP2005333827A (ja) * | 2004-05-24 | 2005-12-08 | Mayekawa Mfg Co Ltd | 食材の把持移動方法及び装置 |
| JP2008100323A (ja) * | 2006-10-20 | 2008-05-01 | National Institute Of Advanced Industrial & Technology | 把持型ロボットハンド |
| JP2009166181A (ja) * | 2008-01-17 | 2009-07-30 | Toyota Motor Corp | ロボットハンド |
| JP2012148380A (ja) * | 2011-01-20 | 2012-08-09 | Motoji Yamamoto | ロボットハンド装置 |
| JP2012166297A (ja) * | 2011-02-14 | 2012-09-06 | Seiko Epson Corp | ロボットハンド及びロボット装置 |
| US20130298759A1 (en) * | 2010-09-30 | 2013-11-14 | Christine Rotinat-Libersa | Integrated mecatronic structure for portable manipulator assembly |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3640564A (en) * | 1971-01-13 | 1972-02-08 | Goodrich Co B F | Fluid-operated actuator |
| DE69022969T2 (de) * | 1989-12-20 | 1996-04-18 | Toshiba Kawasaki Kk | Flexibles Fingerelement. |
| JP2801112B2 (ja) * | 1992-05-29 | 1998-09-21 | シーケーディ株式会社 | 形状可変アクチュエータ |
| DE19833340A1 (de) * | 1998-07-24 | 2000-02-10 | Karlsruhe Forschzent | Wurmförmiger Arbeitsmechanismus |
| EP1190819B1 (en) * | 2000-03-28 | 2004-10-13 | Seiko Epson Corporation | Pump-integrated flexible actuator |
| US6772673B2 (en) * | 2001-12-13 | 2004-08-10 | Seiko Epson Corporation | Flexible actuator |
| CN100346942C (zh) * | 2003-06-27 | 2007-11-07 | 松下电器产业株式会社 | 层积型多关节部驱动机构及其制造方法、设置有该机构的抓握手和机器人臂 |
| WO2006025446A1 (ja) * | 2004-09-01 | 2006-03-09 | Matsushita Electric Industrial Co., Ltd. | 関節駆動装置 |
| KR101674894B1 (ko) * | 2009-12-21 | 2016-11-10 | 삼성전자 주식회사 | 산업용 다자유도 그리퍼 |
| ITFI20110091A1 (it) * | 2011-05-03 | 2012-11-04 | Scuola Superiore Di Studi Universit Arie Di Perfe | Robot con arti morbidi adibiti a locomozione e presa |
| ES2836002T3 (es) * | 2011-10-07 | 2021-06-23 | Harvard College | Sistemas y métodos para accionar accionadores robóticos blandos |
| EP2804721A1 (en) * | 2012-01-19 | 2014-11-26 | President and Fellows of Harvard College | Flexible robotic actuators |
-
2015
- 2015-11-18 WO PCT/US2015/061352 patent/WO2016081605A1/en not_active Ceased
- 2015-11-18 CN CN201580073071.7A patent/CN107110130B/zh not_active Expired - Fee Related
- 2015-11-18 JP JP2017527656A patent/JP6775502B2/ja active Active
- 2015-11-18 AU AU2015350006A patent/AU2015350006B2/en not_active Ceased
- 2015-11-18 EP EP15861785.2A patent/EP3221583B1/en active Active
- 2015-11-18 CA CA2968307A patent/CA2968307C/en active Active
- 2015-11-18 EP EP22204811.8A patent/EP4148272A1/en active Pending
Patent Citations (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3343864A (en) * | 1965-10-07 | 1967-09-26 | James I Baer | Material handling apparatus and the like |
| JPS4916165A (ja) * | 1972-06-07 | 1974-02-13 | ||
| JPS4916164A (ja) * | 1972-06-07 | 1974-02-13 | ||
| JPS5123956A (ja) * | 1974-05-30 | 1976-02-26 | Freudenberg Carl | |
| JPS58500112A (ja) * | 1981-02-24 | 1983-01-20 | キヤタピラ− トラツクタ− カンパニイ | クランプ組立体 |
| JPS5924310U (ja) * | 1982-08-04 | 1984-02-15 | 月星化成株式会社 | 掴み具 |
| JPS6199494U (ja) * | 1984-12-06 | 1986-06-25 | ||
| JPH08300288A (ja) * | 1995-05-09 | 1996-11-19 | Kubota Corp | ロボットハンド |
| JPH08300284A (ja) * | 1995-05-09 | 1996-11-19 | Kubota Corp | ロボットハンド用指 |
| JPH09109077A (ja) * | 1995-10-12 | 1997-04-28 | Kubota Corp | ロボットハンド用指 |
| US6846029B1 (en) * | 2001-08-09 | 2005-01-25 | Gary Dean Ragner | Torus-shaped mechanical gripper |
| JP2003343513A (ja) * | 2002-05-30 | 2003-12-03 | Seiko Epson Corp | フレキシブルアクチュエータ |
| WO2004000508A1 (ja) * | 2002-06-24 | 2003-12-31 | Matsushita Electric Industrial Co., Ltd. | 多関節駆動機構及びその製造方法、それを用いた把持ハンドとロボット |
| JP2005333827A (ja) * | 2004-05-24 | 2005-12-08 | Mayekawa Mfg Co Ltd | 食材の把持移動方法及び装置 |
| JP2008100323A (ja) * | 2006-10-20 | 2008-05-01 | National Institute Of Advanced Industrial & Technology | 把持型ロボットハンド |
| JP2009166181A (ja) * | 2008-01-17 | 2009-07-30 | Toyota Motor Corp | ロボットハンド |
| US20130298759A1 (en) * | 2010-09-30 | 2013-11-14 | Christine Rotinat-Libersa | Integrated mecatronic structure for portable manipulator assembly |
| JP2012148380A (ja) * | 2011-01-20 | 2012-08-09 | Motoji Yamamoto | ロボットハンド装置 |
| JP2012166297A (ja) * | 2011-02-14 | 2012-09-06 | Seiko Epson Corp | ロボットハンド及びロボット装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200009443A (ko) * | 2018-07-19 | 2020-01-30 | 한양대학교 산학협력단 | 소프트 그리퍼 |
| KR102143691B1 (ko) * | 2018-07-19 | 2020-08-11 | 한양대학교 산학협력단 | 소프트 그리퍼 |
| WO2020115889A1 (ja) * | 2018-12-07 | 2020-06-11 | 圭治郎 山本 | ロボットハンド |
| JPWO2020115889A1 (ja) * | 2018-12-07 | 2021-10-07 | 圭治郎 山本 | ロボットハンド |
| JP7058348B2 (ja) | 2018-12-07 | 2022-04-21 | 圭治郎 山本 | ロボットハンド |
| JP2020168691A (ja) * | 2019-04-04 | 2020-10-15 | 学校法人立命館 | ソフトグリッパー |
| JP7373785B2 (ja) | 2019-04-04 | 2023-11-06 | 学校法人立命館 | ソフトグリッパー |
| CN116690618A (zh) * | 2023-02-02 | 2023-09-05 | 江苏理工学院 | 一种双向平行腔室软体机械手 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2968307C (en) | 2023-05-09 |
| EP3221583A1 (en) | 2017-09-27 |
| WO2016081605A1 (en) | 2016-05-26 |
| EP3221583A4 (en) | 2018-12-05 |
| EP3221583B1 (en) | 2022-11-02 |
| CN107110130A (zh) | 2017-08-29 |
| CA2968307A1 (en) | 2016-05-26 |
| AU2015350006A1 (en) | 2017-06-08 |
| JP6775502B2 (ja) | 2020-10-28 |
| AU2015350006B2 (en) | 2019-09-26 |
| EP4148272A1 (en) | 2023-03-15 |
| CN107110130B (zh) | 2019-11-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12145259B2 (en) | Soft robotic actuator enhancements | |
| JP2017534475A (ja) | ソフトロボットアクチュエータの向上 | |
| US10850401B2 (en) | Soft robotic actuators and methods of manufacturing the same | |
| Deimel et al. | A compliant hand based on a novel pneumatic actuator | |
| EP3285976B1 (en) | Enhancement of soft robotic grippers through integration of stiff structures | |
| JP6890329B2 (ja) | ロボットシステム | |
| EP3636392B1 (en) | Modular robotic systems | |
| JP7278597B2 (ja) | ロボットエンドエフェクタのための構造 | |
| JP6721515B2 (ja) | 柔らかい空気圧式指をもつポータブルな義手 | |
| WO2019112987A1 (en) | Pressurizing housing for a soft robotic actuator | |
| US10028734B2 (en) | Soft robotic retractors | |
| US11034017B2 (en) | Soft actuators | |
| CN113104576A (zh) | 一种软体气爪 | |
| US11255356B2 (en) | Fluidic actuator system using auxetic beam reinforcements | |
| EP1985868A1 (en) | Actuator, drive device, hand device, and conveyance device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180822 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200428 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200909 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201006 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6775502 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |