JP2018010331A - 診断装置および診断方法 - Google Patents
診断装置および診断方法 Download PDFInfo
- Publication number
- JP2018010331A JP2018010331A JP2016136494A JP2016136494A JP2018010331A JP 2018010331 A JP2018010331 A JP 2018010331A JP 2016136494 A JP2016136494 A JP 2016136494A JP 2016136494 A JP2016136494 A JP 2016136494A JP 2018010331 A JP2018010331 A JP 2018010331A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- control device
- control
- output signal
- input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Landscapes
- Testing And Monitoring For Control Systems (AREA)
Abstract
【課題】 制御装置の制御対象が複雑なものであっても、制御装置および制御対象の異常現象を再現させ、推定に頼らず異常現象の把握を行うことができる技術を提供する。【解決手段】 記憶部222には、制御装置100および制御対象303を含む制御系における異常時の制御装置100の第1の入力信号および第1の出力信号が記憶される。比較部221は、シミュレーション装置200が制御装置100に接続された状態における制御装置100の第2の入力信号および第2の出力信号と、記憶部222に記憶されている第1の入力信号および第1の出力信号とを比較する。一致判定部223は、それらの信号が概ね一致する場合、一致検出信号を出力する。信号切り替え部224は、一致検出信号を受信したことを契機として、記憶部222に記憶されている第2の出力信号をシミュレーション実行手段210に与える。【選択図】図1
Description
本発明は、制御装置の診断を行う診断装置および制御装置の診断方法に関する。
近年、省エネルギーやエネルギーの有効活用等の視点や環境問題の視点などから、民生用、産業用を問わず、電源や電動機等を制御する電力変換装置が多用されるようになっている。そして、その電動機等や電力変換装置を含めたさまざまな装置が、マイコン(マイクロコントローラ、もしくは、マイクロコンピュータ)を備えた制御装置により制御されるようになっている。
この種の制御装置では、マイコンに実装されるソフトウェアを実行することで制御動作が実現される。実装されるソフトウェアにおいて、その規模は年々大規模化しており、複雑度も年々高くなっている。このため、実装されるソフトウェアの開発を効率的に進める手法への要求が高まっている。
ところで、電力変換装置や電動機を制御する制御装置では、制御装置の出力信号が制御対象(電力変換装置や電動機)に作用し、その結果を示す応答信号がフィードバックされ、フィードバックされた信号を参照して制御対象への出力信号が決められる。このように、電力変換装置や電動機を制御する制御装置は、制御装置単体ではなく、制御装置と制御対象の相互作用により制御動作が決定される性質のものである。
制御装置の開発(特にソフトウェアの開発)を効率良く進める手法として、制御装置の制御対象を模擬するモデルを実時間で実行することができるシミュレーション装置(すなわち、リアルタイムシミュレータ)を用いる手法が提案されている。近年では、この手法をHILS(Hardware In the Loop Simulation)と称している。この手法に関する先行技術文献としては、特許文献1が挙げられる。特許文献1には、ブロック線図によって定義されたシミュレーションモデルのシミュレーションを実行するリアルタイムシミュレーション実行装置が開示されている。
上述のHILSによって開発された制御装置(ソフトウェア)の検証を行う際、検証漏れが生じる虞がある。大規模化したソフトウェアでは、制御装置の動作モードの組み合わせの数は莫大な数にのぼり、現実的にはそのなかから効率良く動作不良等の異常を発見できるような動作モードを抽出して検証せざるを得ないからである。開発された制御装置を実際の制御対象(実機)につなげて診断した際、先の検証において抽出されなかった動作モード(すなわち検証漏れの動作モード)が実行された場合、制御装置や制御対象において動作不良等の障害やそれによる故障などの異常が生じる虞がある。
このような事情から、例えば、特許文献2には、既存のテストパタンから新規のテストパタンを生成し、検証時のテストカバレッジを拡大させることにより、検証漏れを減少させる技術が開示されている。特許文献2の技術では、実装されたソフトウェアの実行網羅度を拡大させることにより動作不良等の異常を発見しようとするアプローチを採っている。このため、ソフトウェアの単体テストについては効果があるかもしれない。しかし、制御装置の仕様に記述された動作が必要かつ十分であることの確認を行うことができない。また、特許文献2の技術では、制御装置単体で検証を行っており、制御装置と制御対象の相互作用により制御装置の制御動作が決定されるような制御装置の仕様の妥当性の確認を行うことができない。このため、特許文献2の技術では、開発された制御装置を実際の制御対象(実機)につなげて診断した際、仕様に記述された動作が必要かつ十分ではないことや仕様が妥当ではないことに起因して、制御装置や制御対象において動作不良等の障害やそれによる故障などの異常が生じる虞がある。
開発された制御装置を実際の制御対象(実機)につなげて診断を行う場合、診断環境が実際の運用環境に近い環境となる。実際の運用環境では、様々な要因が時々刻々に変化したり複雑に絡み合ったりする。このため、制御装置を実機につなげて診断を行う場合、机上のシミュレーションによる検証と比較して、異常現象(例えば、回路故障に至る過程の現象等)の再現や異常の発生原因の特定がより困難である。そこで、例えば、特許文献3には、データベースを参照して異常現象の原因特定を支援する技術が開示されている。
また、特許文献4には、データを記憶する手段を端末装置(具体的にはECUのような制御装置)に設けて障害診断を行う技術が開示されている。特許文献4の端末装置の記憶手段には、診断対象システムの正常時データが記憶される。端末装置は、障害を検知した際の障害時データと記憶手段の正常時データとに基づいて障害診断を行う。
また、特許文献5には、RAMにインバータのゲートパターンやアナログ波形を記憶する技術が開示されている。電力変換装置を制御する制御装置では、時定数がミリ秒以下の制御対象を制御する必要があるが、特許文献5の技術を用いれば、時定数がミリ秒以下のような短時間に変化する入出力信号を高速に処理して記憶することができる。
また、特許文献5の技術では、入力信号のみならず、出力信号も記憶している。制御装置に搭載されるソフトウェアは複雑であり、制御装置の出力信号は、時系列の入力信号に加え、制御装置の状態を含めて決定される。制御装置に搭載されたソフトウェアなどの不具合によって出力信号が想定とは異なるものとなった場合、出力信号を入力信号から再現することは困難であるから、出力信号も記憶するのである。
特許文献5の技術では、記憶した入出力信号波形から、どのような異常現象(例えば、回路故障に至る過程の現象等)が生じたのかを判定するのには、推測に頼らなければならない。制御対象が単純な回路であれば、推測によって異常現象を特定することは可能かもしれない。しかし、実際の制御対象は、例えば電気系や機械系の複合系であったり、電力変換装置のようにアナログ回路やスイッチング回路などを含む回路であったりと、様々な要素が含まれる複雑なものである。制御対象が複雑なものである場合、どのような異常現象が生じたのかを推測によって判定するのは困難である。
本発明は以上に説明した課題に鑑みて為されたものであり、制御装置の制御対象が複雑なものであっても、制御装置および制御対象の異常現象を再現させ、推定に頼らず異常現象の把握を行うことができる技術を提供することを目的とする。
この発明による診断装置は、記憶手段と信号一致判定手段と信号切り替え手段とを有する。記憶手段には、制御装置に制御対象が接続された状態において、制御装置および制御対象を含む制御系の異常が検出されたタイミングを途中に含む所定期間内に制御対象から制御装置へ入力される第1の入力信号および制御装置から制御対象へ出力される第1の出力信号が記憶される。信号一致判定手段は、制御対象のモデルを入力信号に基づいて動作させるシミュレーション実行手段が前記制御装置に接続された状態において、シミュレーション実行手段から制御装置へ入力される第2の入力信号および制御装置からシミュレーション実行手段へ出力される第2の出力信号が、記憶手段に記憶された第1の入力信号および第1の出力信号に概ね一致した場合に、一致検出信号を出力する。信号切り替え手段は、一致検出信号に応じて、シミュレーション実行手段に対する入力信号を第2の出力信号から記憶手段に記憶された第1の出力信号に切り替える。
本診断装置によれば、シミュレーション実行手段から制御装置へ入力される第2の入力信号および制御装置からシミュレーション実行手段へ出力される第2の出力信号が、記憶手段に記憶された第1の入力信号および第1の出力信号に概ね一致した場合、シミュレーション実行手段に対する入力信号が、記憶手段に記憶された第1の出力信号に差し替えられる。記憶手段に記憶された第1の出力信号は、制御装置および制御対象を含む実際の制御系における異常時の制御装置の出力信号である。このため、シミュレーション実行手段に対する入力信号が記憶手段に記憶された第1の出力信号に差し替えられると、シミュレーション実行手段は、実際の制御系における異常時の制御装置の出力信号に基づいてシミュレーションを継続することとなる。これにより、制御装置には、異常時において実際の制御対象から入力される信号と同様の信号がシミュレーション実行手段から入力されることとなる。このため、本診断装置によれば、制御装置およびシミュレーション実行手段に実際の異常時の動作と同じ動作を正確に再現させることができる。例えば、本診断装置によれば、第2の入力信号および第2の出力信号と記憶手段に記憶された第1の入力信号および第1の出力信号とが僅かに違っていたとしても、概ね一致したと判断されることで、シミュレーション実行手段に作用する制御動作が、これら信号の違いに起因して実際の制御動作からかけ離れてゆくことはない。また、シミュレーション結果は数値で示されるものであるが、通常はデジタルデータとして扱われるため、ビット列として厳密に一致していなくても、数値として概ね一致していたら一致検出信号を出力することにより、異常現象として一致していることを見逃すことを少なくすることができる。
さらに、本診断装置によれば、実際の制御系における異常時の入出力信号の履歴を利用するため、診断時において検証する異常現象を繰り返し再現することができ、その異常の検証を繰り返し行うことができる。例えば、制御装置に搭載されているソフトウェアの一部を修正および変更しつつ検証を繰り返すことで、異常現象の原因を特定することが可能となる。このように、検証を繰り返して異常現象の原因を特定することができるため、制御装置の制御対象が複雑なものであっても、推定に頼らずに異常現象を把握することができる。
この発明による診断方法は、記憶過程と信号一致判定過程と信号切り替え過程とを有する。記憶過程では、制御装置に制御対象を接続し、制御装置および制御対象を含む制御系の異常が検出されたタイミングを途中に含む所定期間内に制御対象から制御装置へ入力される第1の入力信号および制御装置から制御対象へ出力される第1の出力信号を記憶手段に記憶させる。信号一致判定過程では、制御対象のモデルを入力信号に基づいて動作させるシミュレーション実行手段を制御装置に接続し、シミュレーション実行手段から制御装置へ入力される第2の入力信号および制御装置からシミュレーション実行手段へ出力される第2の出力信号が、記憶手段に記憶された第1の入力信号および第1の出力信号に概ね一致した場合に、一致検出信号を出力する。信号切り替え過程では、一致検出信号に応じて、シミュレーション実行手段に対する入力信号を第2の出力信号から記憶手段に記憶された第1の出力信号に切り替える。本診断方法によれば、上述の診断装置と同様に、制御装置およびシミュレーション実行手段に実際の異常時の動作と同じ動作を正確に再現させることができる。
従って、この発明によれば、制御装置の制御対象が複雑なものであっても、制御装置および制御対象の異常現象を再現させ、推定に頼らず異常現象の把握を行うことができる。
以下、図面を参照しつつ本発明の実施形態を説明する。
(実施形態)
図1は、この発明の一実施形態による診断装置としての役割を果たす診断手段220を含むシミュレーション装置200を有する診断システム1の構成を示すブロック図である。診断システム1は、例えば、制御装置100の開発時に用いられ、制御装置100(特に制御装置100に実装されるソフトウェア)の不具合などの異常を検証する診断システムである。診断システム1は、制御装置100、シミュレーション装置200、センサ301、インバータ302、制御対象303および接続スイッチ400から構成される。
(実施形態)
図1は、この発明の一実施形態による診断装置としての役割を果たす診断手段220を含むシミュレーション装置200を有する診断システム1の構成を示すブロック図である。診断システム1は、例えば、制御装置100の開発時に用いられ、制御装置100(特に制御装置100に実装されるソフトウェア)の不具合などの異常を検証する診断システムである。診断システム1は、制御装置100、シミュレーション装置200、センサ301、インバータ302、制御対象303および接続スイッチ400から構成される。
制御対象303は、例えば、電動機である。制御対象303は、インバータ302から供給される電力に従って動作する。インバータ302は、制御装置100から供給される信号に応じて動作し、制御対象303に電力を供給する。このため、インバータ302および制御対象303は、広義には、制御装置100の制御対象である。センサ301は、制御対象303の各種状態(例えば制御対象303に流れる電流や制御対象303の速度など)を検出して検出結果を制御装置100に引き渡す。本実施形態では、制御対象303に関するひとまとまりのシステムである制御対象303、インバータ302およびセンサ301を制御対象系300と呼ぶ。
接続スイッチ400は、制御装置100と制御対象系300との接続と、制御装置100とシミュレーション装置200との接続を切り替えるスイッチである。診断システム1における制御装置100の診断では、まず、制御装置100を制御対象系300に接続した構成を採る。この構成において、制御装置100に通常の制御動作をさせる。制御装置100と制御対象系300とを含む実際の制御系において異常が生じると、制御装置100は、後述する異常検出部114においてその異常を検出して、異常時の制御装置100の入出力信号を記憶する。記憶された異常時の入出力信号は、シミュレーション装置200に移されて保持される。そして、制御装置100と制御対象系300とを接続した構成から制御装置100とシミュレーション装置200とを接続した構成に切り替えられる。接続スイッチ400における接続の切り替えは、制御装置100の指示に従って行われても良いし、診断システム1のユーザによって行われても良い。
制御装置100は、A/D(アナログ/デジタル)変換器110、PWM(Pulse Width Modulation)タイマ111、制御部112および記憶部115を有する。
A/D変換器110は、制御装置100への入力信号の信号形式をアナログ形式からデジタル形式に変換する回路である。制御装置100が制御対象系300と接続されている場合には、A/D変換器110には、センサ301から出力される信号が入力される。A/D変換回路110によって変換された制御装置100への入力信号は、制御部112に引き渡される。
PWMタイマ111は、制御部112から与えられる指令値をキャリア信号によりパルス幅変調し、制御装置100の出力信号であるPWM信号を生成する回路である。制御装置100が制御対象系300と接続されている場合には、PWMタイマ111は、PWM信号をゲートドライバ(図示略)を介してインバータ302に供給する。以後、制御対象系300から制御装置100へ入力される信号を第1の入力信号と呼び、制御装置100から制御対象系300へ出力される信号を第1の出力信号と呼ぶことがある。
制御部112は、制御対象303を制御するための各種の演算を行うプロセッサである。制御部112は、具体的には、マイコンである。制御装置100には、制御ソフトウェア113がインストールされている。制御部112が制御ソフトウェア113を実行することにより各種の演算が実現される。
制御装置100は、制御装置100およびその制御対象(具体的にはインバータ302および制御対象303)を含む制御系における異常を検出する異常検出部114を備えている。異常検出部114は、制御ソフトウェア113に組み込まれた異常検出に関するソフトウェアモジュールを制御部112が実行することで実現される。異常検出部114は、センサ301の検出結果を用いて、例えば、制御対象303に供給される電流が過電流であるなどの異常を検出する。異常検出部114は、異常を検出した場合、異常を検出した旨を示す異常通知信号を記憶部115に出力する。
記憶部115は、制御装置100へ入力される入力信号(具体的には、A/D変換器110によってデジタル形式に変換された入力信号)および制御装置100から出力される出力信号(具体的には、PWMタイマ111から出力された出力信号)を記憶するバッファである。記憶部115は、例えば、SRAM(Static Random Access Memory)である。
記憶部115は、リングバッファとして使用される。より詳細には、記憶部115は、1μsごとの信号が格納される信号格納領域を10000領域備えている。すなわち、記憶部115は、格納対象信号(制御装置100の入力信号および出力信号)を合計10msの時間区間分だけ格納する領域を備えている。記憶部115は、格納対象信号を1μs周期で信号格納領域の1番目の領域(先端領域)から10000番目の領域(末端領域)に向かって順次に格納してゆく。記憶部115は、信号格納領域の末端領域に格納対象信号を格納すると、その次の周期の格納対象信号を信号格納領域の先端領域に格納して上書きする。そして、記憶部115は、再度、格納対象信号を1μs周期で末端領域に向かって順次に格納して上書きする。これにより、記憶部115は、通常、最新の10msの時間区間分の格納対象信号を保持する。
記憶部115は、異常を検出した旨を示す異常通知信号の受信を契機として、当該異常通知信号を受け取った時刻から所定時間分だけ格納対象信号の格納を継続した後に格納対象信号の格納を停止する。この際の格納を継続する所定時間は、記憶部115が保持可能な時間幅(10ms)以下に予め設定される。
図2は、異常検出部114が異常を検出した際の記憶部115に格納される信号を説明するタイムチャートである。記憶部115は、時刻t2において、異常を検出した旨を示す異常通知信号を異常検出部114から受信したとする。記憶部115は、時刻t2における信号格納領域から1000領域分だけ後の領域までの格納対象信号の格納を順次に行った後に格納を停止する。信号格納領域1000領域分は1msの時間区間に相当するため、記憶部115は、時刻t2の1ms後である時刻t3まで制御装置100の入力信号および出力信号を取得することとなる。これにより、記憶部115は、異常が検出されたタイミングである時刻t2の9ms前である時刻t1から、時刻t2の1ms後である時刻t3までの10ms分の制御装置100の入力信号および出力信号を取得した状態を維持する。すなわち、記憶部115は、制御装置100および制御対象303を含む実際の制御系における異常が検出されたタイミングを途中に含む所定期間内(図2では時刻t1から時刻t3まで)に制御装置100へ入力される入力信号および制御対象303へ出力される出力信号を取得して記憶する手段である。
シミュレーション装置200は、シミュレーション実行手段210と診断手段220とを有する。診断手段220は、記憶部222、比較部221、一致判定部223および信号切り替え部224を有する。
記憶部222は、制御装置100の記憶部115によって取得された実際の制御系における異常時の入出力信号(より正確には、異常が検出されたタイミングを途中に含む所定期間における制御装置100の第1の入力信号および第1の出力信号)が記憶される記憶手段である。シミュレーション装置200は、制御装置100およびシミュレーション装置200が接続されたネットワーク(図示略)を介した通信によって制御装置100の記憶部115から当該異常時の入出力信号を取得して記憶部222に格納する。なお、記憶部115から記憶部222への当該異常時の入出力信号の移行は、ネットワークを介した通信により行う態様に限らず、例えば、フラッシュメモリ装置のような持ち運び可能な不揮発性記憶装置を介して行っても良い。
シミュレーション実行手段210は、通常のプロセッサを核としたCPU(Central Processing Unit)システムである。シミュレーション実行手段210には、制御対象303を模擬する制御対象モデル211、センサ301を模擬するセンサモデル212およびインバータ302を模擬するインバータモデル213が搭載される。制御対象モデル211、センサモデル212およびインバータモデル213は、シミュレーション実行手段210が実行可能な形式で表されたソフトウェアである。例えば、制御対象モデル211は、制御対象303がLCR回路であれば、微分方程式で記述される回路方程式を離散積分法により離散化して差分方程式に変換して表したものである。シミュレーション実行手段210は、シミュレーション実行手段210に入力される信号に基づいて、制御対象モデル211、センサモデル212およびインバータモデル213を実時間で実行し、シミュレーション実行手段210から出力する信号を生成する。これにより、シミュレーション実行手段210は、実機である制御対象303、センサ301およびインバータ302と同様の動作を再現する。シミュレーション実行手段210は、これらの動作を実時間で再現可能なハードウェアで構成される。
制御装置100とシミュレーション装置200とが接続された状態において、シミュレーション実行手段210の出力信号は、シミュレーション装置200から出力されて制御装置100(具体的にはA/D変換器110)に入力される。また、この状態において、制御装置100(具体的にはPWMタイマ111)から出力された信号は、シミュレーション装置200に入力される。シミュレーション装置200に入力された制御装置100の出力信号は、通常、信号切り替え部224を介してシミュレーション実行手段210に入力される。以後、シミュレーション装置200から制御装置100へ入力される信号を第2の入力信号と呼び、制御装置100からシミュレーション装置200へ出力される信号を第2の出力信号と呼ぶことがある。
比較部221は、第2の入力信号および第2の出力信号と、記憶部222に記憶された第1の入力信号および第1の出力信号との比較を行う比較手段である。より詳細には、まず、実時間で入出力される第2の入力信号および第2の出力信号がリングバッファとして使用される図示しない記憶手段に格納される。この記憶手段には、最新の所定の時間区間(例えば10ms)分の第2の入力信号および第2の出力信号が発生時刻順に保持される。比較部221は、この記憶手段から最新の所定の時間区間分の第2の入力信号および第2の出力信号を所定の周期で読み出す。比較部221は、第2の入力信号および第2の出力信号を読み出す周期と同様の周期で、所定期間分の第1の入力信号および第1の出力信号を記憶部222から読み出す。比較部221は、読み出した所定時間区間の第2の入力信号と読み出した所定期間分の第1の入力信号とを比較するとともに、読み出した所定時間区間の第2の出力信号と所定期間分の第1の出力信号とを比較する。
一致判定部223は、所定の時間区間における第2の入力信号および第2の出力信号が所定期間分の第1の入力信号および第1の出力信号に概ね一致したか否かを比較部221の比較結果に基づいて判定し、第2の入力信号および第2の出力信号が第1の入力信号および第1の出力信号と概ね一致した場合に、概ね一致した旨を示す一致検出信号を出力する。すなわち、一致判定部223は、制御装置100とシミュレーション装置200との間で制御装置100と制御対象303との間と同様な異常が生じたか否かを判断する。第2の入力信号および第2の出力信号(すなわち、シミュレーションデータ)と、第1の入力信号および第1の出力信号(すなわち、実制御データ)との間には、有意ではないずれが生じることがある。このため、一致判定部223は、第2の入力信号および第2の出力信号と、第1の入力信号および第1の出力信号とが完全に一致したか否かを判定するのではなく、ある程度の幅をもって概ね一致したか否かを判定する。
すなわち、比較部221および一致判定部223は、シミュレーション実行手段210が制御装置100に接続された状態において、シミュレーション実行手段210から制御装置100へ入力される第2の入力信号および制御装置100からシミュレーション実行手段210へ出力される第2の出力信号が、記憶部222に記憶された第1の入力信号および第1の出力信号に概ね一致した場合に、一致検出信号を出力する信号一致判定手段を構成する。
信号切り替え部224は、一致検出信号に応じて、シミュレーション実行手段に対する入力信号を第2の出力信号から記憶部222に記憶された第1の出力信号に切り替える信号切り替え手段である。より詳細には、信号切り替え部224は、一致検出信号を受信していない間、制御装置100のPWMタイマ111から出力された第2の出力信号をシミュレーション実行手段210に与える。一方、信号切り替え部224は、一致検出信号を受信すると、その一致検出信号を受信したタイミング以降のシミュレーション実行手段210に対する入力信号を記憶部222に記憶された第1の出力信号のうち異常が検出されたタイミング以降の期間の第1の出力信号に切り替える。
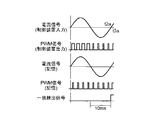
図3は、比較部221、一致判定部223および信号切り替え部224の動作を説明するタイムチャートである。図3の例では、比較部221は、10msの時間区間で、制御装置100の入出力信号の比較を行っている。これは、記憶部222に記憶された信号の時間区間が10msだからである。図3では、時刻t2a以前の10msの時間区間において、制御装置100の入力信号(第2の入力信号)と記憶部222に記憶された入力信号(第1の入力信号)とが概ね一致し、制御装置100の出力信号(第2の出力信号)と記憶部222に記憶された出力信号(第1の出力信号)とが概ね一致している。このため、時刻t2aにおいて、一致判定部223は、一致検出信号を信号切り替え部224に出力する。信号切り替え部224は、一致判定部223から一致検出信号を受信すると、記憶部222に格納されているPWM信号のうちの異常が検出されたタイミングである時刻t2以降の期間である時刻t2から時刻t3までの期間(図2参照)のPWM信号を読み出して、読み出したPWM信号をシミュレーション実行手段210に与え、時刻t3aでシミュレーションを終了する。すなわち、図3の例では、時刻t2aまでは制御装置100から出力されたPWM信号がシミュレーション実行手段210に与えられ、時刻t2a後からは記憶部222に記憶されているPWM信号がシミュレーション実行手段210に与えられる。
図3の例では、時刻t2a後において、制御装置100のPWM信号のパルス幅と記憶部222に記憶されているPWM信号のパルス幅とが異なっている。時刻t2aにおいてシミュレーション実行手段210に与えるPWM信号を切り替えなかったとしたら、PWM信号のパルス幅が異なることに起因して、シミュレーション実行手段210におけるシミュレーションに実際の制御対象との誤差が生じることとなる。これに対し、本実施形態の診断システム1では、時刻t2aにおいて実際の制御対象と同じパルス幅のPWM信号をシミュレーション実行手段210に与えるため、その後のシミュレーション実行手段210におけるシミュレーションに実際の制御対象との誤差は生じない。
より詳細には、時刻t2a後では、シミュレーション実行手段210におけるインバータモデル213の応答および制御対象モデル211の応答が記憶部222に記憶されているPWM信号に応じたものとなる。このため、センサモデル212の出力もその制御対象モデル211の応答に従ったものとなる。制御装置100は、そのセンサモデル212の出力に従って制御動作を行うため、制御装置100から出力されてシミュレーション装置200に入力される信号も記憶部222に記憶されているPWM信号に応じたものとなる。
シミュレーション装置200は、時刻t2a後に新たに得られたPWM信号と、記憶部222に記憶されているPWM信号とをさらに比較する。診断システム1によれば、この比較結果から、所期の異常現象の再現ができていることを確認することができる。また、所期の異常現象の再現の確認は、時刻t2a後の制御対象モデル211の内部信号の波形と、制御装置100を制御対象系300に接続して制御対象303を動作させたときに得られる波形との比較結果を参照しても良い。
さらに、診断システム1によれば、時刻t2a後の制御装置100内の動作を追跡することで、異常の検証を繰り返し行うことができる。例えば、制御装置100に制御装置100の内部データをモニタするモニタリング装置を接続して、モニタリング装置のモニタ結果を参照しながらシミュレーション装置200によるシミュレーションを繰り返すことで異常現象の再現を行い、現象の分析や異常の原因特定を行うことができる。他の例として、制御装置100に搭載されているソフトウェア113の一部修正および変更とシミュレーション装置によるシミュレーションとを繰り返すことで異常の原因特定を行うことができる。
図4は、診断システム1の動作を説明するフローチャートである。まず、制御装置100は、接続スイッチ400を動作させて制御装置100を制御対象系300に接続する(ステップS100)。次に、制御装置100は、制御対象系300の制御を開始する。制御装置100の異常検出部114は、制御装置100および制御対象系300において異常を検出するまで異常の検出を繰り返す(ステップS110:No)。異常検出部114は、異常を検出すると(ステップS110:Yes)、異常を検出した旨の異常通知信号を記憶部115に出力する。記憶部115は、異常通知信号を受け取ると、異常が検出されたタイミングを途中に含む所定期間における制御装置100の入力信号および出力信号(すなわち異常時の入出力信号)を取得して保持する(ステップS120)。
異常時の入出力信号を取得した後、制御装置100は、取得した異常時の入出力信号をネットワーク介してシミュレーション装置200に送る。シミュレーション装置200は、制御装置100から送られた異常時の入出力信号を記憶部222に保持する(ステップS130)。次に、制御装置100は、接続スイッチ400を動作させて、制御装置100と制御対象系300とを接続した構成から制御装置100とシミュレーション装置200とを接続した構成に切り替える(ステップS140)。
次に、シミュレーション装置200は、終了指示を取得したか否かを判断し(ステップS150)、終了指示を取得した場合(ステップS150:Yes)、シミュレーションを終了し、終了指示を取得しなかった場合(ステップS150:No)、シミュレーションを実行する(ステップS160)。
シミュレーションが実行されると、比較部221は、制御装置100の入出力信号と、記憶部222に記憶されている異常時の制御装置100の入出力信号とを比較する(ステップS170)。次に、一致判定部223は、比較部221の比較結果が概ね一致しているか否かを判定する(ステップS180)。概ね一致していない場合(ステップS180:No)、終了指示の取得の判断(ステップS150)およびシミュレーションの実行(ステップS160)を繰り返す。概ね一致した場合(ステップS180:Yes)、一致判定部223は、一致検出信号を信号切り替え部224に出力する。信号切り替え部224は、一致検出信号を受信すると、シミュレーション実行手段210に与える信号を、制御装置100の出力信号から記憶部222に記憶されている出力信号に切り替える(ステップS190)。そして、シミュレーション装置200は、終了指示の取得の判断(ステップS150)およびシミュレーションの実行(ステップS160)を繰り返す。
以上のように、シミュレーション装置200の診断手段220によれば、シミュレーション実行手段210から制御装置100へ入力される第2の入力信号および制御装置100からシミュレーション実行手段210へ出力される第2の出力信号が、記憶部222に記憶された第1の入力信号および第1の出力信号に概ね一致した場合、シミュレーション実行手段210に対する入力信号が、記憶部222に記憶された第1の出力信号に差し替えられる。記憶部222に記憶された第1の出力信号は、制御装置100および制御対象303を含む実際の制御系における異常時の制御装置100の出力信号である。このため、シミュレーション実行手段210に入力される信号が記憶部222に記憶されている第1の出力信号に差し替えられると、シミュレーション実行手段210は、実際の制御系における異常時の制御装置100の出力信号に基づいてシミュレーションを継続することとなる。これにより、制御装置100には、異常時において実際の制御対象303から入力される信号と同様の信号がシミュレーション実行手段210から入力されることとなる。このため、診断手段220によれば、制御装置100およびシミュレーション実行手段210に実際の異常時の動作と同じ動作を正確に再現させることができる。例えば、診断手段220によれば、第2の入力信号および第2の出力信号と記憶222に記憶されている第1の入力信号および第1の出力信号とが僅かに違っていたとしても、概ね一致したと判断されることで、シミュレーション実行手段210に作用する制御動作が、これら信号の違いに起因して実際の制御動作からかけ離れてゆくことはない。また、シミュレーション結果は数値で示されるものであるが、通常はデジタルデータとして扱われるため、ビット列として厳密に一致していなくても、数値として概ね一致していたら一致検出信号を出力することにより、異常現象として一致していることを見逃すことが少なくなる。
また、診断手段220によれば、実際の制御系における異常時の入出力信号の履歴を利用するため、診断時において検証する異常現象を繰り返し再現することができ、その異常の検証を繰り返し行うことができる。例えば、制御装置100に搭載されているソフトウェアの一部を修正および変更しつつ検証を繰り返すことで、異常現象の原因を特定することが可能となる。このように、検証を繰り返して異常現象の原因を特定することができるため、制御装置100の制御対象が複雑なものであっても、推定に頼らずに異常現象を把握することができる。
従って、本実施形態のシミュレーション装置200の診断手段220によれば、制御装置100の制御対象(インバータ302および制御対象303)が複雑なものであっても、制御装置100およびその制御対象の異常現象を再現させ、推定に頼らず異常現象の把握を行うことができる。
また、本実施形態のシミュレーション装置200の診断手段220によれば、原因となったソフトウェアの異常等を特定できるようになるため、そのソフトウェアの異常等を適切に修正および改良することが可能となり、制御装置100の品質を向上させることができるとともに、制御装置100を効率よく短時間で開発することができる。
(変形)
以上本発明の一実施形態について説明したが、この実施形態に以下の変形を加えても勿論良い。
以上本発明の一実施形態について説明したが、この実施形態に以下の変形を加えても勿論良い。
(1)実施形態では、シミュレーション実行手段210を含むシミュレーション装置200内に診断手段220が設けられていた。しかし、診断手段220は、シミュレーション実行手段210を含むシミュレーション装置とは別体の診断装置によって実現されても良い。
(2)記憶部115および222によって実現される記憶過程、比較部221および一致判定部223によって実現される信号一致判定過程および信号切り替え部224によって実現される信号切り替え過程を有する診断方法を提供しても良い。
(3)実施形態では、制御装置100と制御対象系300との接続と、制御装置100とシミュレーション装置200との接続とを接続スイッチ400によって切り替えていた。しかし、それらの接続の切り替えを接続スイッチ400を用いずに行っても良い。また、実施形態では、制御装置100が接続スイッチ400を動作させていた。しかし、診断システム1のユーザが接続スイッチ400を直接に操作しても良い。
(4)実施形態の記憶部115は、10msの時間区間分の入出力信号を記憶していた。しかし、記憶部115が保持可能な時間幅は10msに限らない。
(5)実施形態の比較部221は、10msの時間区間について入出力信号の比較を行っていた。しかし、比較を行う時間区間は、10msの時間区間に限らず、制御装置100の記憶部115において取得される信号の時間幅に合わせて適宜に設定されても良い。
(6)実施形態では、制御装置100への入力信号はアナログ形式の信号であった。しかし、制御装置100への入力信号は、デジタル形式の信号であっても良い。この場合、制御装置100は、A/D変換器110に代えて汎用ポート等のデジタル入出力装置によってデジタル形式の入力信号を受け取れば良い。また、実施形態では、制御装置100からの出力信号はPWM信号であった。しかし、制御装置100からの出力信号は、汎用ポート等のデジタル入出力装置を介して出力されるPWM信号以外のデジタル形式の出力信号や、アナログ形式の信号であっても良い。アナログ形式の場合、制御装置100は、PWMタイマ111によって生成されたPWM信号を低域通過フィルタに供給し、低域通過フィルタを通過したアナログ形式の信号を出力するものとしても良い。
(7)実施形態の異常検出部114はソフトウェアによって実現された。しかし、異常検出部をハードウェアによって実現しても良い。異常検出部をハードウェアによって実現すると、異常検出部をソフトウェアによって実現する場合に比べて信号処理を高速に行うことができ、入力信号が高速な信号であっても異常の検出を十分に行うことができる。
(8)実施形態の異常検出部114が検出する異常には、制御装置100の制御電源に影響を与える虞がある異常も考えられる。このため、診断システム1に制御装置100の制御電源についてのバックアップ電源を設けても良い。この態様によれば、制御装置100の制御電源に影響を与える異常が生じたとしても、異常が検出されたタイミング以後も継続して記憶部115への格納対象信号の格納を問題なく行える。
(9)実施形態のシミュレーション装置200では、第2の入力信号および第2の出力信号が記憶部222に記憶されている第1の入力信号および第1の出力信号に一致した場合に、シミュレーション実行手段210に与える信号を第2の出力信号から記憶部222に記憶されている第1の出力信号に切り替えていた。しかし、シミュレーション装置200において、第2の入力信号および第2の出力信号が記憶部222に記憶されている第1の入力信号および第1の出力信号に一致した場合、シミュレーション実行手段210に与える信号を制御装置100の出力信号に維持したままにし、シミュレーション実行手段210に一致検出信号を出力するようにしても良い。この態様では、実施形態の態様に比べて異常現象の再現の正確性には欠けるものの、診断を継続することはできるからである。
1…診断システム、100…制御装置、110…A/D変換器、111…PWMタイマ、112…制御部、113…制御ソフトウェア、114…異常検出部、115…記憶部、200…シミュレーション装置、210…シミュレーション実行手段、211…制御対象モデル、212…センサモデル、213…インバータモデル、220…診断手段、221…比較部、222…記憶部、223…一致判定部、224…信号切り替え部、300…制御対象系、301…センサ、302…インバータ、303…制御対象、400…接続スイッチ。
Claims (3)
- 制御装置に制御対象が接続された状態において、前記制御装置および前記制御対象を含む制御系の異常が検出されたタイミングを途中に含む所定期間内に前記制御対象から前記制御装置へ入力される第1の入力信号および前記制御装置から前記制御対象へ出力される第1の出力信号が記憶される記憶手段と、
前記制御対象のモデルを入力信号に基づいて動作させるシミュレーション実行手段が前記制御装置に接続された状態において、前記シミュレーション実行手段から前記制御装置へ入力される第2の入力信号および前記制御装置から前記シミュレーション実行手段へ出力される第2の出力信号が、前記記憶手段に記憶された前記第1の入力信号および前記第1の出力信号に概ね一致した場合に、一致検出信号を出力する信号一致判定手段と、
前記一致検出信号に応じて、前記シミュレーション実行手段に対する入力信号を前記第2の出力信号から前記記憶手段に記憶された前記第1の出力信号に切り替える信号切り替え手段と
を有することを特徴とする診断装置。 - 前記信号切り替え手段は、
前記一致検出信号が出力されるのに応じて、前記シミュレーション実行手段に対する入力信号を前記記憶手段に記憶された前記第1の出力信号のうち異常が検出されたタイミング以降の期間の前記第1の出力信号に切り替える
ことを特徴とする請求項1に記載の診断装置。 - 制御装置に制御対象を接続し、前記制御装置および前記制御対象を含む制御系の異常が検出されたタイミングを途中に含む所定期間内に前記制御対象から前記制御装置へ入力される第1の入力信号および前記制御装置から前記制御対象へ出力される第1の出力信号を記憶手段に記憶させる記憶過程と、
前記制御対象のモデルを入力信号に基づいて動作させるシミュレーション実行手段を前記制御装置に接続し、前記シミュレーション実行手段から前記制御装置へ入力される第2の入力信号および前記制御装置から前記シミュレーション実行手段へ出力される第2の出力信号が、前記記憶手段に記憶された前記第1の入力信号および前記第1の出力信号に概ね一致した場合に、一致検出信号を出力する信号一致判定過程と、
前記一致検出信号に応じて、前記シミュレーション実行手段に対する入力信号を前記第2の出力信号から前記記憶手段に記憶された前記第1の出力信号に切り替える信号切り替え過程と
を有することを特徴とする診断方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016136494A JP2018010331A (ja) | 2016-07-11 | 2016-07-11 | 診断装置および診断方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016136494A JP2018010331A (ja) | 2016-07-11 | 2016-07-11 | 診断装置および診断方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018010331A true JP2018010331A (ja) | 2018-01-18 |
Family
ID=60995495
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016136494A Withdrawn JP2018010331A (ja) | 2016-07-11 | 2016-07-11 | 診断装置および診断方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018010331A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019159843A (ja) * | 2018-03-13 | 2019-09-19 | オムロン株式会社 | 故障予測支援装置、故障予測支援方法及び故障予測支援プログラム |
| JP2020052812A (ja) * | 2018-09-27 | 2020-04-02 | 横河電機株式会社 | エンジニアリングシステム及びエンジニアリング方法 |
-
2016
- 2016-07-11 JP JP2016136494A patent/JP2018010331A/ja not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019159843A (ja) * | 2018-03-13 | 2019-09-19 | オムロン株式会社 | 故障予測支援装置、故障予測支援方法及び故障予測支援プログラム |
| JP2020052812A (ja) * | 2018-09-27 | 2020-04-02 | 横河電機株式会社 | エンジニアリングシステム及びエンジニアリング方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109840207B (zh) | 一种基于autosar网络管理自动化测试系统及测试方法 | |
| CN111312325B (zh) | 一种bbu故障诊断方法、装置、电子设备及存储介质 | |
| CN106650072B (zh) | 一种基于半实物仿真的虚拟同发电机并网检测系统及方法 | |
| JP2015005189A (ja) | Ecu評価装置、コンピュータプログラム及びecu評価方法 | |
| Stój | Cost-effective hot-standby redundancy with synchronization using ethercat and real-time ethernet protocols | |
| CN103139033B (zh) | 单主通信控制总线主设备冗余切换方法 | |
| CN114124767A (zh) | 网关网络管理策略的自动测试方法及装置 | |
| CN117075570A (zh) | 数据处理方法、设备及系统 | |
| CN118331244B (zh) | 一种汽车电机控制器运行环境模拟方法及系统 | |
| KR20120020867A (ko) | 이중화 구조를 갖는 제어기 및 그 운용 방법 | |
| CN104914853B (zh) | 一种主辅控制器切换时间的测量方法及系统 | |
| JP2018010331A (ja) | 診断装置および診断方法 | |
| CN112306033B (zh) | 车载控制器联合测试控制方法、装置及系统 | |
| CN114610555B (zh) | 一种设备的故障诊断方法及故障诊断设备 | |
| JP2024524846A (ja) | モジュール式の生産設備でアラームを管理するための方法およびシステム | |
| CN106405277B (zh) | 核电站保护系统中主处理单元的试验装置和方法 | |
| US20220057769A1 (en) | Programmable microgrid control system | |
| Allen | Simulation and test systems for validation of electric drive and battery management systems | |
| CN119782179A (zh) | 一种bios的自动化测试方法、装置、介质和电子设备 | |
| CN112398672B (zh) | 一种报文检测方法及装置 | |
| US20080273466A1 (en) | Correlation of data of a control and/or data transmission system and of a system model representing it | |
| CN105959193A (zh) | 列车控制方法和系统 | |
| CN117579530A (zh) | 一种诊断路由的测试方法、装置、系统、测试主机及介质 | |
| CN110707811B (zh) | 高压多变流器系统的故障节点定位方法及装置 | |
| CN202995449U (zh) | 一种测试装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20190415 |