JP2018024084A - 吸着装置 - Google Patents
吸着装置 Download PDFInfo
- Publication number
- JP2018024084A JP2018024084A JP2017114130A JP2017114130A JP2018024084A JP 2018024084 A JP2018024084 A JP 2018024084A JP 2017114130 A JP2017114130 A JP 2017114130A JP 2017114130 A JP2017114130 A JP 2017114130A JP 2018024084 A JP2018024084 A JP 2018024084A
- Authority
- JP
- Japan
- Prior art keywords
- suction
- adsorption
- adsorbed
- pressing
- pressing member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Manipulator (AREA)
Abstract
【課題】任意の姿勢に配置される被吸着体を吸着するとともに、より確実に吸着解除する。
【解決手段】被吸着体を一方向の吸引力により吸着する吸着部5と、該吸着部5により吸着されている被吸着体を、吸引力とは逆方向に押圧して吸着状態を解除する押圧部6とを備え、該押圧部6が、吸引力の方向に沿って進退可能に設けられて被吸着体を押圧する押圧部材9aと、該押圧部材9aを進退させる駆動部12とを備える吸着装置1を提供する。
【選択図】図2
【解決手段】被吸着体を一方向の吸引力により吸着する吸着部5と、該吸着部5により吸着されている被吸着体を、吸引力とは逆方向に押圧して吸着状態を解除する押圧部6とを備え、該押圧部6が、吸引力の方向に沿って進退可能に設けられて被吸着体を押圧する押圧部材9aと、該押圧部材9aを進退させる駆動部12とを備える吸着装置1を提供する。
【選択図】図2
Description
本発明は、吸着装置に関するものである。
従来、上方に開口する円筒状の蛇腹部を有する吸着パッドの内側に固定されたピンを有し、ガラス板のような平坦な被吸着体の下方に配置されてこれを吸着する吸着装置が知られている(例えば、特許文献1参照。)。
この吸着装置は、吸着パッドの開口端に配置された円環状のパッドを被吸着体の下面に密着させた状態で、蛇腹部を伸張させることにより、吸着パッドの内圧を負圧に変化させて被吸着体を吸着状態とする一方、蛇腹部を収縮させて、吸着パッドの内圧を外気圧に近づけながら、ピンによって被吸着体を上方に押すことにより、吸着を解除するものである。
この吸着装置は、吸着パッドの開口端に配置された円環状のパッドを被吸着体の下面に密着させた状態で、蛇腹部を伸張させることにより、吸着パッドの内圧を負圧に変化させて被吸着体を吸着状態とする一方、蛇腹部を収縮させて、吸着パッドの内圧を外気圧に近づけながら、ピンによって被吸着体を上方に押すことにより、吸着を解除するものである。
しかしながら、特許文献1の吸着装置では、被吸着体に吸着する吸着パッドと該吸着パッドの内部に配置されるピンとが、下端において相互に固定されているため、当該下端をロボットアームの動作によって下降させるだけで、どのようにして吸着パッドの上端とピンの上端とを相対移動させることができるのか不明である。また、ピンの上端に被吸着体を載せて支持した状態から吸着パッドを吸着させる必要があり、限られた姿勢に配置された被吸着体しか吸着することができないという不都合がある。
本発明は上述した事情に鑑みてなされたものであって、任意の姿勢に配置される被吸着体を吸着するとともに、より確実に吸着解除することができる吸着装置を提供することを目的としている。
上記目的を達成するため、本発明は以下の手段を提供する。
本発明の一態様は、被吸着体を一方向の吸引力により吸着する吸着部と、該吸着部により吸着されている前記被吸着体を、前記吸引力とは逆方向に押圧して吸着状態を解除する押圧部とを備え、該押圧部が、前記吸引力の方向に沿って進退可能に設けられて前記被吸着体を押圧する押圧部材と、該押圧部材を進退させる駆動部とを備える吸着装置を提供する。
本発明の一態様は、被吸着体を一方向の吸引力により吸着する吸着部と、該吸着部により吸着されている前記被吸着体を、前記吸引力とは逆方向に押圧して吸着状態を解除する押圧部とを備え、該押圧部が、前記吸引力の方向に沿って進退可能に設けられて前記被吸着体を押圧する押圧部材と、該押圧部材を進退させる駆動部とを備える吸着装置を提供する。
本態様によれば、被吸着体を吸着する際には、吸着部を被吸着体に近接させて一方向の吸引力を作用させることにより被吸着体を吸引して吸着することができる。また、被吸着体の吸着状態を解除する際には、押圧部によって吸引力の方向とは逆方向に被吸着体を押圧することにより、吸引力が残留していても被吸着体を吸着部から強制的に引き離して吸着状態をより確実に解除することができる。この場合において、吸着部および押圧部を被吸着体の姿勢に合わせて配置することができ、任意の姿勢に配置される被吸着体を吸着することができる。
上記態様においては、前記吸着部が、前記被吸着体に密着させられる環状の吸着パッドと、該吸着パッドの内側を減圧する減圧手段とを備え、前記押圧部材が、前記吸着パッドの内側に配置されていてもよい。
このようにすることで、被吸着体を吸着する際には、環状の吸着パッドを被吸着体に密着させ、吸着パッドの内側を減圧手段によって減圧することにより圧力差によって被吸着体を吸着することができる。そして、被吸着体の吸着状態を解除する際には、吸着パッドの内部において押圧部材を前進させて被吸着体を吸着パッドから引き離す方向に押圧することにより、吸着状態をより確実に解除することができる。
このようにすることで、被吸着体を吸着する際には、環状の吸着パッドを被吸着体に密着させ、吸着パッドの内側を減圧手段によって減圧することにより圧力差によって被吸着体を吸着することができる。そして、被吸着体の吸着状態を解除する際には、吸着パッドの内部において押圧部材を前進させて被吸着体を吸着パッドから引き離す方向に押圧することにより、吸着状態をより確実に解除することができる。
また、上記態様においては、前記被吸着体が磁性材料からなり、前記吸着部が、前記被吸着体を磁力により吸着してもよい。
このようにすることで、磁性材料からなる被吸着体を吸着する際には、吸着部を被吸着体に近接させて、吸着部の発生する磁力による一方向の吸引力を被吸着体に作用させることにより、被吸着体を磁力により吸引して吸着することができる。また、被吸着体の吸着状態を解除する際には、押圧部によって吸引力の方向とは逆方向に被吸着体を押圧することにより、磁力による吸引力が残留していても被吸着体を吸着部から強制的に引き離して吸着状態をより確実に解除することができる。
このようにすることで、磁性材料からなる被吸着体を吸着する際には、吸着部を被吸着体に近接させて、吸着部の発生する磁力による一方向の吸引力を被吸着体に作用させることにより、被吸着体を磁力により吸引して吸着することができる。また、被吸着体の吸着状態を解除する際には、押圧部によって吸引力の方向とは逆方向に被吸着体を押圧することにより、磁力による吸引力が残留していても被吸着体を吸着部から強制的に引き離して吸着状態をより確実に解除することができる。
また、上記態様においては、前記吸着部が環状に形成され、前記押圧部材が前記吸着部の内側に配置されていてもよい。
このようにすることで、被吸着体を吸着する際には、環状の吸着部を被吸着体に近接させて磁力を作用させることにより磁力によって被吸着体を吸着することができる。そして、被吸着体の吸着状態を解除する際には、環状の吸着部の内部において押圧部材を前進させて被吸着体を吸着部から引き離す方向に押圧することにより、磁力を断ち切って吸着状態をより確実に解除することができる。
このようにすることで、被吸着体を吸着する際には、環状の吸着部を被吸着体に近接させて磁力を作用させることにより磁力によって被吸着体を吸着することができる。そして、被吸着体の吸着状態を解除する際には、環状の吸着部の内部において押圧部材を前進させて被吸着体を吸着部から引き離す方向に押圧することにより、磁力を断ち切って吸着状態をより確実に解除することができる。
また、上記態様においては、前記押圧部材が、前記吸着部の外側の該吸着部を挟む少なくとも2箇所において、前記被吸着体を押圧するように配置されていてもよい。
このようにすることで、吸着部により吸着されている箇所を挟む2箇所以上において被吸着体が吸引力とは逆方向に押されるので、押圧力を分散させることができるとともに、吸着が解除される際の被吸着体の姿勢を安定して維持することができる。
このようにすることで、吸着部により吸着されている箇所を挟む2箇所以上において被吸着体が吸引力とは逆方向に押されるので、押圧力を分散させることができるとともに、吸着が解除される際の被吸着体の姿勢を安定して維持することができる。
また、上記態様においては、前記押圧部材が、前記吸着部を貫通可能かつ前記被吸着体より小さい内径寸法の貫通孔を備え、前記駆動部が、前記吸着部を前記貫通孔内に引っ込めた位置と前記貫通孔内から突出させた位置との間で前記押圧部材を進退させてもよい。
このようにすることで、駆動部により吸着部を貫通孔から突出させた位置に押圧部材を配置して吸着部により被吸着体を吸着させ、駆動部により吸着部を貫通孔内に引っ込めた位置に押圧部材を移動させることにより、吸着パッドに吸着された被吸着体に押圧部材を突き当てて被吸着体を吸着パッドから引き離す方向に押圧し、吸着状態をより確実に解除することができる。
また、上記態様においては、前記吸着部が複数設けられ、前記押圧部が前記吸着部毎に独立して駆動可能に設けられていてもよい。
このようにすることで、異なる吸着部に吸着されている被吸着体を別個に押圧して異なる位置あるいはタイミングで吸着状態を解除することができる。
このようにすることで、異なる吸着部に吸着されている被吸着体を別個に押圧して異なる位置あるいはタイミングで吸着状態を解除することができる。
また、上記態様においては、前記吸着部が複数設けられ、前記押圧部材が複数の前記吸着部に吸着されている複数の前記被吸着体を押圧可能に設けられていてもよい。
このようにすることで、異なる吸着部に吸着されている異なる被吸着体を共通の押圧部材によって押圧して吸着状態を同時に解除することができる。これにより押圧部材の数を減らし、吸着装置を簡易に構成することができる。
このようにすることで、異なる吸着部に吸着されている異なる被吸着体を共通の押圧部材によって押圧して吸着状態を同時に解除することができる。これにより押圧部材の数を減らし、吸着装置を簡易に構成することができる。
また、上記態様においては、前記駆動部が、前記押圧部材の移動量を調節可能であってもよい。
このようにすることで、押圧部材を過不足ない移動量で前進させて、押圧部材を押し出し過ぎることによる吸着状態の解除時における周辺装置との干渉や、押し出し不足による吸着状態の不十分な解除を防止することができる。
このようにすることで、押圧部材を過不足ない移動量で前進させて、押圧部材を押し出し過ぎることによる吸着状態の解除時における周辺装置との干渉や、押し出し不足による吸着状態の不十分な解除を防止することができる。
また、上記態様においては、前記駆動部が、前記押圧部材の移動速度を調節可能であってもよい。
このようにすることで、押圧部材を過不足ない移動速度で前進させて、遅過ぎることによる被吸着体の吸着状態の解除に要する時間の増加や、早過ぎることによる被吸着体の飛散を防止することができる。
このようにすることで、押圧部材を過不足ない移動速度で前進させて、遅過ぎることによる被吸着体の吸着状態の解除に要する時間の増加や、早過ぎることによる被吸着体の飛散を防止することができる。
また、上記態様においては、前記吸着部による吸引の停止と前記押圧部による押圧開始のタイミングを調節する制御部を備えていてもよい。
このようにすることで、被吸着体の吸着状態の解除時における吸着部による吸引の停止と押圧部による押圧開始のタイミングが制御部により調節され、吸着部による吸着特性に対応して、吸着状態を適正に解除することができる。
このようにすることで、被吸着体の吸着状態の解除時における吸着部による吸引の停止と押圧部による押圧開始のタイミングが制御部により調節され、吸着部による吸着特性に対応して、吸着状態を適正に解除することができる。
本発明によれば、任意の姿勢に配置される被吸着体を吸着するとともに、より確実に吸着解除することができるという効果を奏する。
本発明の一実施形態に係る吸着装置1について、図面を参照しながら以下に説明する。
本実施形態に係る吸着装置1は、例えば、ロボットのアーム(図示略)の先端に取り付けられて、ハンドリングするワーク(被吸着体)Aを吸着し、ロボットの動作によって搬送し、所定の場所で吸着状態を解除することにより解放するために使用される装置である。本実施形態においては、射出成形機(図示略)によって成形された樹脂成形品をワークAとする場合を説明する。
本実施形態に係る吸着装置1は、例えば、ロボットのアーム(図示略)の先端に取り付けられて、ハンドリングするワーク(被吸着体)Aを吸着し、ロボットの動作によって搬送し、所定の場所で吸着状態を解除することにより解放するために使用される装置である。本実施形態においては、射出成形機(図示略)によって成形された樹脂成形品をワークAとする場合を説明する。
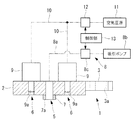
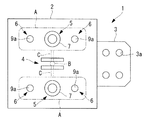
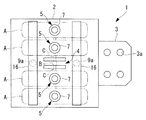
吸着装置1は、図1から図4に示されるように、本体部2と該本体部2をロボットに取り付けるための取付部3とを備えている。本体部2は、略中央に配置され、樹脂成形の際に形成されるスプルーBを把持するために開閉可能なスプルーチャック4と、該スプルーチャック4を中心にして複数配置された吸着部5と、吸着部5毎に、吸着部5を挟んで両側に配置された押圧部6とを備えている。図中3aはボルト等によってロボットに取り付けるための孔である。
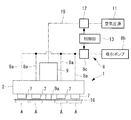
図1に示される例では、吸着部5はスプルーチャック4を挟む位置に2箇所備えられている。各吸着部5は、例えば、円環状の吸着パッド7と、該吸着パッド7内部を減圧する減圧手段8とを備えている。吸着パッド7は、ワークAの表面に密着させられる密着面7aを備える弾性変形可能なゴム等の材料からなっている。減圧手段8は、吸着パッド7の内側に接続する配管8aと、該配管8aの基端側に接続された吸引ポンプ8bと、配管8a内を減圧状態と大気圧状態とに切り替えるバルブ8cとを備えている。
押圧部6は、例えば、エアシリンダ9と該エアシリンダ9に配管10を経由して空気圧を供給する空気圧源11と、該空気圧源11からの空気圧の供給をオン、オフに切り替えるバルブ(駆動部)12とを備えている。
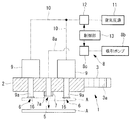
エアシリンダ9は、図4に示されるように、吸着パッド7の密着面7aを含む平面よりも本体部2側に引っ込んだ位置と、図5に示されるように、吸着パッド7の密着面7aを含む平面より本体部2とは反対側に突出した位置との間で進退させられるピストンロッド(押圧部材)9aを備えている。エアシリンダ9は、空気圧を供給することによりピストンロッド9aを突出させ、空気圧を停止することにより、例えば、内蔵された図示しないバネによってピストンロッド9aを引っ込める方向に移動させるようになっている。
エアシリンダ9は、図4に示されるように、吸着パッド7の密着面7aを含む平面よりも本体部2側に引っ込んだ位置と、図5に示されるように、吸着パッド7の密着面7aを含む平面より本体部2とは反対側に突出した位置との間で進退させられるピストンロッド(押圧部材)9aを備えている。エアシリンダ9は、空気圧を供給することによりピストンロッド9aを突出させ、空気圧を停止することにより、例えば、内蔵された図示しないバネによってピストンロッド9aを引っ込める方向に移動させるようになっている。
バルブ8c,12には制御部13が接続されており、制御部13から送られてくる指令信号によって、吸着部5による吸引と押圧部6による押圧のタイミングが調節されるようになっている。例えば、吸着部5による強い吸着状態のまま押圧部6による押圧が行われたのでは、ワークAに負荷がかかるため、制御部13は、吸着部5による吸引を停止した後の所定のタイミングで押圧部6による押圧動作を開始させるように制御するようになっている。
このように構成された本実施形態に係る吸着装置1の作用について以下に説明する。
本実施形態に係る吸着装置1を用いてワークAを吸着し、ロボットの動作によってワークAを搬送し、所望の位置においてワークAの吸着状態を解除して解放するには、ロボットを作動させて吸着装置1の本体部2を移動させ、本体部2をワークAの取り出し位置に配置する。
このとき、制御部13は、2つのバルブ8c,12を制御して、エアシリンダ9のピストンロッド9aが引っ込んだ状態に設定し、吸着部5の配管8a内を大気圧状態に設定している。
本実施形態に係る吸着装置1を用いてワークAを吸着し、ロボットの動作によってワークAを搬送し、所望の位置においてワークAの吸着状態を解除して解放するには、ロボットを作動させて吸着装置1の本体部2を移動させ、本体部2をワークAの取り出し位置に配置する。
このとき、制御部13は、2つのバルブ8c,12を制御して、エアシリンダ9のピストンロッド9aが引っ込んだ状態に設定し、吸着部5の配管8a内を大気圧状態に設定している。
ワークAが樹脂成形品である場合に、射出成形機から吸着装置1にワークAが引き渡される際には、射出成形機によって、ワークAとスプルーBおよびランナーCとがゲートによって切り離された状態で引き渡されるので、図3に鎖線で示されるように、スプルーBおよびランナーCはスプルーチャック4によって把持され、ランナーCから切り離されたワークAは吸着部5によって吸着されることとなる。
次いで、ロボットの作動によって本体部2に設けられた吸着部5の吸着パッド7の密着面7aをワークAの表面に十分に近接させる。この状態で、制御部13がバルブ8cを開放し吸引ポンプ8bによって吸着部5の配管8a内の空気を吸引することにより、吸着パッド7の内側を減圧状態にして、図4に示されるように、ワークAを吸着パッド7の密着面7aに吸着させる。これにより、ワークAを射出成形機から取り出すことができる。
そして、ロボットを動作させることによって、吸着装置1によって吸着したワークAを所望の搬送先まで搬送する。その後、制御部13によってバルブ8cを制御して配管8a内の減圧状態を大気圧状態に切り替えるとともに、バルブ12を制御して、空気圧源11からの空気圧をエアシリンダ9に供給することにより、図5に示されるように、ピストンロッド9aを突出させる。
これにより、突出したピストンロッド9aの先端が、吸着パッド7に吸着状態に配置されているワークAの表面に突き当たって、これを吸引力とは逆方向に押圧するので、吸着パッド7とワークAとの間に隙間が形成されて吸着状態が解除され、ワークAを搬送先に正確に解放することができる。また、このとき、ピストンロッド9aによる押圧に先立って吸着部5による吸引を停止しているので、吸着部5による吸引力が低減されており、ピストンロッド9aによる押圧によって、ワークAに過大な負荷がかかることを防止することができる。
また、本実施形態に係る吸着装置1によれば、吸着パッド7を挟む位置に配置されている2箇所のピストンロッド9aによって、ワークAを押圧するので、吸着部5による吸引力が残っている状態で吸着状態を解除しても、ワークAの姿勢を安定して維持することができるという利点がある。これにより、吸着装置1による吸着状態を解除されたワークAが、残留している吸引力に引っ張られて、予期せぬ方向に落下したり、予期せぬ姿勢で搬送先に解放されたりすることを防止することができる。
また、本実施形態に係る吸着装置1によれば、吸着部5と押圧部6とが独立して作動可能なので、ワークAを吸着する際のワークAの姿勢には制限がなく、任意の姿勢のワークAを吸着することができるとともに、ワークAを任意の姿勢で解放することができるという利点がある。
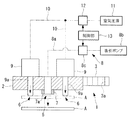
なお、本実施形態においては、吸着部5として、円環状の吸着パッド7内を減圧することによりワークAを吸着することとしたが、これに代えて、ワークAが磁性材料からなる場合には、吸着部5として、磁力を発生する永久磁石または電磁石等の磁石15を採用してもよい。この場合には、吸着部5を構成する磁石15は、環状である必要はなく、図6に示されるように円板状、あるいは他の任意の形状であってもよい。
吸着部5を電磁石により構成すれば、磁力の発生および停止を切り替えて、空気圧と同様にして、吸引力のオンオフと押圧部6による押圧のタイミングを適正に調整することができる。
また、本実施形態においては、2つの吸着部5と2組の押圧部6を有する場合を例示したが、これに代えて、他の任意の個数の吸着部5と押圧部6とを有することにしてもよい。また、各吸着部5により吸着されたワークAを解放する押圧部6は、吸着部5毎にオンオフのタイミングを異ならせることにしてもよい。このようにすることで、同時に吸着した複数のワークAをロボットで搬送しながら、異なる搬送先に別々に解放することができる。
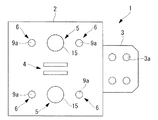
また、本実施形態においては、吸着部5毎に、吸着されたワークAを押圧する押圧部6をそれぞれ設けたが、これに代えて、図7から図10に示されるように、複数の吸着部5に吸着された複数のワークAを1組の押圧部6によって同時に押し出すことにしてもよい。図7から図10に示される例では、4つの吸着部5に吸着された4つのワークAを1組の押圧部6によって同時に押し出している。
各エアシリンダ9のピストンロッド9aの先端には、ワークAの配列方向に延びて、複数のワークAに跨るように配置された帯板状部材16が固定されており、エアシリンダ9のピストンロッド9aを押し出すと、帯板状部材16が全てのワークAを同時に押圧するようになっている。
これにより、ワークAの数が多くても押圧部6の数を減らすことができ、吸着装置1を簡易かつ低コストで構成することができるという利点がある。
これにより、ワークAの数が多くても押圧部6の数を減らすことができ、吸着装置1を簡易かつ低コストで構成することができるという利点がある。
また、このようにすることで、ピストンロッド9aの先端の狭い領域で押されていた図1から図6の吸着装置1と比較して、帯板状部材16によって比較的広い領域でワークAを安定して押すことができるという利点もある。
また、本実施形態においては、円環状の吸着パッド7の外側に、吸着パッド7を挟んだ両側に押圧部6を配置したが、これに代えて、図11および図12に示されるように、円環状の吸着パッド7の内側においてピストンロッド9aを進退させるように構成してもよい。このようにすることで、さらに簡易に構成することができる。なお、図12に示されるように、吸着パッド7内を減圧状態にして吸着する場合の他、円環状の吸着パッド7を永久磁石または電磁石等の磁石15として磁力による吸引力を発生させる場合に適用してもよい。
また、本実施形態においては、押圧部6としてエアシリンダ9からなるものを例示したが、これに代えて、ピストンロッド9aのような押圧部材を進退させる任意の駆動源(駆動部)を採用してもよい。例えば、モータ(図示略)により駆動される直動機構(図示略)を採用すれば、モータの回転量および回転速度によってピストンロッド9aの移動量および移動速度を調節することができる。
直動機構としては、ボールネジ機構、カム機構、クランク機構をサーボモータと組み合わせた機構あるいはリニアモータを挙げることができる。
微細なワークAをコンベア上やワークAが丁度収まる形状のトレイ上に解放する等の場合、ピストンロッド9aの突出量や突出速度の調節が重要である。
微細なワークAをコンベア上やワークAが丁度収まる形状のトレイ上に解放する等の場合、ピストンロッド9aの突出量や突出速度の調節が重要である。
突出量が小さ過ぎると吸引力が残っている場合や静電気の影響によってワークAが吸着装置1から離脱せず、適正な位置に解放することができないという不都合がある。一方、突出量が大き過ぎるとトレイやコンベアとの干渉が懸念され、ワークAの損傷等が発生する虞がある。モータの回転量を調整することで、ピストンロッド9aの突出量を適正に調整して、上記不都合の発生を防止することができる。
また、ピストンロッド9aの突出速度が遅過ぎると、動作時間が長くなってタクトタイムに影響を与え、生産性が低下するという不都合がある。一方、突出速度が速過ぎると、押圧されたワークAが飛散して所望の位置に解放できなくなるという不都合がある。モータの回転速度を調整することで、ピストンロッド9aの突出速度を適正に調整して、上記不都合の発生を防止することができる。
また、本実施形態においては、バルブ8c,12に接続された制御部13から送られてくる指令信号によって、吸着部5による吸引と押圧部6による押圧のタイミングを調節することとしたが、複数の吸着部5および押圧部6毎に、タイミングを調節することにしてもよい。射出成形機の金型のキャビティ内で成形されたワークAを取り出す際に、ワークAがキャビティから分離される際の特性がキャビティ毎に異なる場合がある。僅かに特性の異なるワークAに対してキャビティ毎に吸引開始や押圧開始のタイミングを調整することにより、安定した連続運転が可能となる。
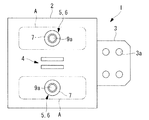
また、図7に示す例においては、2つのエアシリンダ9のピストンロッド9aの先端にそれぞれ取り付けた帯板状部材16によって複数のワークAを同時に押圧して、吸着部5から離脱させているが、帯板状部材16に代えて、図13および図14に示されるように、吸着パッド7を板厚方向に貫通可能かつワークAより小さい内径寸法の貫通孔18を備える平板部材(押圧部材)17を採用してもよい。
この場合には、ピストンロッド9aを引っ込めることにより、貫通孔18に吸着パッド7を貫通させて、平板部材17を本体部2と吸着パッド7の先端との間に配置した状態で、吸着パッド7の先端にワークAを吸着する。そして、ピストンロッド9aを突出させることにより、ピストンロッド9aの先端に設けた平板部材17によって吸着パッド7に吸着されているワークAの表面を押圧して、ワークAの吸着状態を解除することができる。
1 吸着装置
5 吸着部
6 押圧部
7 吸着パッド
8 減圧手段
9a ピストンロッド(押圧部材)
12 バルブ(駆動部)
13 制御部
15 磁石(吸着部)
17 平板部材(押圧部材)
A ワーク(被吸着体)
5 吸着部
6 押圧部
7 吸着パッド
8 減圧手段
9a ピストンロッド(押圧部材)
12 バルブ(駆動部)
13 制御部
15 磁石(吸着部)
17 平板部材(押圧部材)
A ワーク(被吸着体)
Claims (11)
- 被吸着体を一方向の吸引力により吸着する吸着部と、
該吸着部により吸着されている前記被吸着体を、前記吸引力とは逆方向に押圧して吸着状態を解除する押圧部とを備え、
該押圧部が、前記吸引力の方向に沿って進退可能に設けられて前記被吸着体を押圧する押圧部材と、該押圧部材を進退させる駆動部とを備える吸着装置。 - 前記吸着部が、前記被吸着体に密着させられる環状の吸着パッドと、該吸着パッドの内側を減圧する減圧手段とを備え、
前記押圧部材が、前記吸着パッドの内側に配置されている請求項1に記載の吸着装置。 - 前記被吸着体が磁性材料からなり、
前記吸着部が、前記被吸着体を磁力により吸着する請求項1に記載の吸着装置。 - 前記吸着部が環状に形成され、
前記押圧部材が前記吸着部の内側に配置されている請求項3に記載の吸着装置。 - 前記押圧部材が、前記吸着部の外側の該吸着部を挟む少なくとも2箇所において、前記被吸着体を押圧するように配置されている請求項1または請求項3に記載の吸着装置。
- 前記押圧部材が、前記吸着部を貫通可能かつ前記被吸着体より小さい内径寸法の貫通孔を備え、
前記駆動部が、前記吸着部を前記貫通孔内に引っ込めた位置と前記貫通孔内から突出させた位置との間で前記押圧部材を進退させる請求項1または請求項3に記載の吸着装置。 - 前記吸着部が複数設けられ、
前記押圧部が前記吸着部毎に独立して駆動可能に設けられている請求項1から請求項6のいずれかに記載の吸着装置。 - 前記吸着部が複数設けられ、
前記押圧部材が複数の前記吸着部に吸着されている複数の前記被吸着体を押圧可能に設けられている請求項1または請求項3に記載の吸着装置。 - 前記駆動部が、前記押圧部材の移動量を調節可能である請求項1から請求項8のいずれかに記載の吸着装置。
- 前記駆動部が、前記押圧部材の移動速度を調節可能である請求項1から請求項9のいずれかに記載の吸着装置。
- 前記吸着部による吸引の停止と前記押圧部による押圧開始のタイミングを調節する制御部を備える請求項1から請求項10のいずれかに記載の吸着装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017212660.4A DE102017212660A1 (de) | 2016-07-27 | 2017-07-24 | Saugvorrichtung |
| US15/657,440 US20180029807A1 (en) | 2016-07-27 | 2017-07-24 | Suction device |
| CN201710611479.6A CN107662217A (zh) | 2016-07-27 | 2017-07-25 | 吸附装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016147735 | 2016-07-27 | ||
| JP2016147735 | 2016-07-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018024084A true JP2018024084A (ja) | 2018-02-15 |
Family
ID=61194031
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017114130A Pending JP2018024084A (ja) | 2016-07-27 | 2017-06-09 | 吸着装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018024084A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108312164A (zh) * | 2018-03-20 | 2018-07-24 | 嘉科(安徽)密封技术有限公司 | 一种波形弹簧拾取装置 |
| CN108438898A (zh) * | 2018-03-30 | 2018-08-24 | 佛山市南海区广工大数控装备协同创新研究院 | 一种柔性新型磁力吸盘抓手 |
| JP2022502273A (ja) * | 2018-10-12 | 2022-01-11 | トゥルーバード インク.Truebird, Inc. | 複数の軸に沿ってワークを同時搬送する食品・飲料調製ロボットのスループットの向上 |
| JP2022073058A (ja) * | 2020-10-30 | 2022-05-17 | カネテック株式会社 | 吸着型吊り上げ装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1065396A (ja) * | 1996-08-20 | 1998-03-06 | Taiyo Yuden Co Ltd | 電子部品吸着ヘッド |
| JP2003094368A (ja) * | 2001-09-20 | 2003-04-03 | Fujitsu Ltd | 真空吸着ハンド |
| US20050226711A1 (en) * | 2003-11-08 | 2005-10-13 | Bernd Schnoor | Process and device for handling objects |
| JP2010115743A (ja) * | 2008-11-12 | 2010-05-27 | Tomey Corp | コンタクトレンズの移送用プローブ及び移送方法 |
-
2017
- 2017-06-09 JP JP2017114130A patent/JP2018024084A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1065396A (ja) * | 1996-08-20 | 1998-03-06 | Taiyo Yuden Co Ltd | 電子部品吸着ヘッド |
| JP2003094368A (ja) * | 2001-09-20 | 2003-04-03 | Fujitsu Ltd | 真空吸着ハンド |
| US20050226711A1 (en) * | 2003-11-08 | 2005-10-13 | Bernd Schnoor | Process and device for handling objects |
| JP2010115743A (ja) * | 2008-11-12 | 2010-05-27 | Tomey Corp | コンタクトレンズの移送用プローブ及び移送方法 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108312164A (zh) * | 2018-03-20 | 2018-07-24 | 嘉科(安徽)密封技术有限公司 | 一种波形弹簧拾取装置 |
| CN108438898A (zh) * | 2018-03-30 | 2018-08-24 | 佛山市南海区广工大数控装备协同创新研究院 | 一种柔性新型磁力吸盘抓手 |
| JP2022502273A (ja) * | 2018-10-12 | 2022-01-11 | トゥルーバード インク.Truebird, Inc. | 複数の軸に沿ってワークを同時搬送する食品・飲料調製ロボットのスループットの向上 |
| US12090640B2 (en) | 2018-10-12 | 2024-09-17 | Truebird, Inc. | Breakaway end-effectors for food and beverage preparation robots |
| JP2022073058A (ja) * | 2020-10-30 | 2022-05-17 | カネテック株式会社 | 吸着型吊り上げ装置 |
| JP7201257B2 (ja) | 2020-10-30 | 2023-01-10 | カネテック株式会社 | 吸着型吊り上げ装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20180029807A1 (en) | Suction device | |
| JP2018024084A (ja) | 吸着装置 | |
| JP5903159B2 (ja) | チャック装置 | |
| KR102337111B1 (ko) | 워크피스 유지장치 | |
| KR100791004B1 (ko) | 진공 흡착형 피커 및 피킹 방법 | |
| US8454068B2 (en) | Edge grip device and robot including the same | |
| EP2840014B1 (en) | Multifunction legs for autonomous crawling assembly equipment | |
| JP7159713B2 (ja) | ロボットハンド | |
| US6591493B1 (en) | Method of preventing a nozzle drop in a component mounting apparatus | |
| US20200039131A1 (en) | Mold changing apparatus | |
| JP2016094282A (ja) | シート材分離補助装置 | |
| JP2013104074A (ja) | 粉末成形体のチャッキング装置 | |
| WO2022024897A1 (ja) | 部品保持治具、ロボットシステム及び部品取付方法 | |
| JP2017164855A (ja) | ハンドリング装置 | |
| EP3482936A1 (en) | Platform structure of 3d printer and carrier thereof | |
| CN217142938U (zh) | 一种双通道自动锁螺丝机 | |
| JP2013193191A (ja) | 吸着装置、電子部品の製造装置、及び、電子部品の製造方法 | |
| JP2012129322A (ja) | 部品吸着ノズル装置 | |
| TWI655145B (zh) | 電子元件的入料裝置及其入料方法 | |
| JP6114811B1 (ja) | ねじ締め機 | |
| JP2010188436A (ja) | ロック機能付き把持装置 | |
| JP7505949B2 (ja) | ハンドシステム及びハンドプログラム | |
| US11167985B2 (en) | Drawing device and drawing method | |
| JP2000185890A (ja) | 吸着装置 | |
| JP2016507035A (ja) | バランスウェイト装着システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180823 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180904 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190305 |