JP2018024388A - 走行装置 - Google Patents
走行装置 Download PDFInfo
- Publication number
- JP2018024388A JP2018024388A JP2016158719A JP2016158719A JP2018024388A JP 2018024388 A JP2018024388 A JP 2018024388A JP 2016158719 A JP2016158719 A JP 2016158719A JP 2016158719 A JP2016158719 A JP 2016158719A JP 2018024388 A JP2018024388 A JP 2018024388A
- Authority
- JP
- Japan
- Prior art keywords
- support member
- front wheel
- wheel support
- length
- rotation angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Automatic Cycles, And Cycles In General (AREA)
- Body Structure For Vehicles (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
Claims (1)
- ユーザが搭乗して走行する走行装置であって、
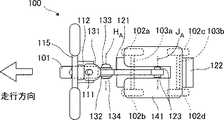
前輪を回転可能に支持する前輪支持部材と、
走行方向に並ぶ複数の後輪のそれぞれを回転可能に支持する台車基体と、
前記台車基体に設置された前記ユーザの搭乗部と、
前記複数の後輪のそれぞれの回転軸と平行な揺動軸周りに前記台車基体に揺動可能に軸支された後輪支持部材と、
前記前輪および前記複数の後輪のうちの少なくともひとつを駆動する駆動部と、
前記前輪支持部材と前記後輪支持部材を相対的に回転させる回転部を含み、前記ユーザの動作が伝達することにより前記前輪支持部材と前記後輪支持部材のなす角が変化して、前記前輪と前記複数の後輪のホイールベース長が調整される調整機構と、
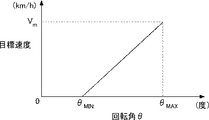
前記ホイールベース長に連動するパラメータに対応付けられた目標速度に基づいて前記駆動部を制御する制御部と
を備える走行装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016158719A JP6669002B2 (ja) | 2016-08-12 | 2016-08-12 | 走行装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016158719A JP6669002B2 (ja) | 2016-08-12 | 2016-08-12 | 走行装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018024388A true JP2018024388A (ja) | 2018-02-15 |
| JP6669002B2 JP6669002B2 (ja) | 2020-03-18 |
Family
ID=61194813
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016158719A Active JP6669002B2 (ja) | 2016-08-12 | 2016-08-12 | 走行装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6669002B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020151160A (ja) * | 2019-03-20 | 2020-09-24 | 豊田市 | 六輪式電動車両 |
| JP2021020594A (ja) * | 2019-07-29 | 2021-02-18 | 株式会社CuboRex | クローラユニットおよびこれを備えた走行車両 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011218847A (ja) * | 2010-04-05 | 2011-11-04 | Toyota Motor Corp | 移動体 |
| US20140008138A1 (en) * | 2012-07-06 | 2014-01-09 | ROBO3 Co.,Ltd. | Electric Vehicle Driven with Interaction with Rider |
| WO2015092913A1 (ja) * | 2013-12-20 | 2015-06-25 | 株式会社日立製作所 | 二輪移動体及びその制御方法 |
-
2016
- 2016-08-12 JP JP2016158719A patent/JP6669002B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011218847A (ja) * | 2010-04-05 | 2011-11-04 | Toyota Motor Corp | 移動体 |
| US20140008138A1 (en) * | 2012-07-06 | 2014-01-09 | ROBO3 Co.,Ltd. | Electric Vehicle Driven with Interaction with Rider |
| WO2015092913A1 (ja) * | 2013-12-20 | 2015-06-25 | 株式会社日立製作所 | 二輪移動体及びその制御方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020151160A (ja) * | 2019-03-20 | 2020-09-24 | 豊田市 | 六輪式電動車両 |
| JP2021020594A (ja) * | 2019-07-29 | 2021-02-18 | 株式会社CuboRex | クローラユニットおよびこれを備えた走行車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6669002B2 (ja) | 2020-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100431906C (zh) | 共轴两轮车辆 | |
| US10450028B2 (en) | Traveling apparatus | |
| CN107813891B (zh) | 行驶装置 | |
| JP2018024386A (ja) | 走行装置 | |
| CN103318255A (zh) | 叉车的转向稳定系统和方法 | |
| JP2013233895A (ja) | 車両 | |
| JP6575470B2 (ja) | 走行装置 | |
| JP2018002108A (ja) | 走行装置 | |
| JP6669002B2 (ja) | 走行装置 | |
| JP6565831B2 (ja) | 走行装置 | |
| WO2014087962A1 (ja) | 乗用二輪車 | |
| JP6497368B2 (ja) | 走行装置 | |
| WO2018180754A1 (ja) | 車両 | |
| JP7571283B2 (ja) | 車両 | |
| JP6493341B2 (ja) | 走行装置 | |
| JP2012148640A (ja) | 車両 | |
| JP2011046275A (ja) | 車両 | |
| JP6699443B2 (ja) | 走行装置 | |
| JP6565826B2 (ja) | 走行装置 | |
| JP6722916B2 (ja) | 車両 | |
| JP6561944B2 (ja) | 走行装置 | |
| JP6561945B2 (ja) | 走行装置 | |
| JP2018002109A (ja) | 走行装置 | |
| JP2018047821A (ja) | 走行装置 | |
| JP2018030515A (ja) | 走行装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200210 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6669002 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |