JP2018088833A - 電動式作業機 - Google Patents
電動式作業機 Download PDFInfo
- Publication number
- JP2018088833A JP2018088833A JP2016232330A JP2016232330A JP2018088833A JP 2018088833 A JP2018088833 A JP 2018088833A JP 2016232330 A JP2016232330 A JP 2016232330A JP 2016232330 A JP2016232330 A JP 2016232330A JP 2018088833 A JP2018088833 A JP 2018088833A
- Authority
- JP
- Japan
- Prior art keywords
- cutting blade
- operation lever
- electric
- lever
- traveling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/76—Driving mechanisms for the cutters
- A01D34/78—Driving mechanisms for the cutters electric
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/67—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis hand-guided by a walking operator
- A01D34/68—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis hand-guided by a walking operator with motor driven cutters or wheels
- A01D34/6806—Driving mechanisms
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/82—Other details
- A01D34/824—Handle arrangements
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/67—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis hand-guided by a walking operator
- A01D34/68—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis hand-guided by a walking operator with motor driven cutters or wheels
- A01D2034/6843—Control levers on the handle of the mower
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D2101/00—Lawn-mowers
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Harvester Elements (AREA)
Abstract
【課題】刈刃の回転速度を可変設定でき、しかもその操作が操作性よく的確に行われるようにすること。【解決手段】刈刃用電動モータ6の回転速度を互いに異なる回転速度を設定する複数のスイッチ74、76と、複数のスイッチ74、76毎に設けられた複数の操作ボタン78、80とをハンドル20に設け、各操作ボタン78、80の操作部78A、80Aの大きさが互いに異なったものにする。【選択図】図3
Description
本発明は、電動式作業機に関し、更に詳細には、自走可能な電動芝刈機や電動除雪機等の電動式作業機、耕耘機等に関する。
電動芝刈機として、車輪と、刈刃を含む芝刈部と、これらを駆動する電動モータとが本体に設けられ、本体から後方に縦部材が延出し、縦部材(縦バー)の遊端にハンドルが結合された自走可能な電動芝刈機が知られている(特許文献1〜3)。このような電動芝刈機では、ハンドルに設けられたスイッチがオンするによって電動モータが駆動され、刈刃が回転する。
従来の電動芝刈機では、刈刃の回転はオン・オフだけで、回転速度を可変設定することができない。
本発明が解決しようとする課題は、刈刃の回転速度を可変設定でき、しかもその操作が操作性よく的確に行われるようにすることである。
本発明による電動作業機は、本体(2)と、前記本体(2)に設けられた作業部(3)及び車輪(4、5)と、前記本体(2)に設けられ、前記作業部(3)を駆動する作業部用電動モータ(6)と、前記本体(2)から後方に延出する縦部材(20A、20B)を含むハンドル(20)と、前記ハンドル(20)に設けられ、前記作業部用電動モータ(6)の回転速度を設定する速度設定装置とを有し、前記速度設定装置は、互いに異なる回転速度を設定する複数のスイッチ(74、76)と、前記複数のスイッチ(74、76)毎に設けられた複数の操作ボタン(78、80)とを有し、前記複数の操作ボタン(78、80)は、操作部(78A、80A)との大きさが互いに異なっている。
この構成によれば、操作ボタン(78、80)によってスイッチ(74、76)が操作されることにより、作業部用電動モータ(6)の回転速度が切替設定される。しかも、操作部(78A、80A)の大きさが互いに異なっているので、作業者は目視によって設定すべき回転速度の操作ボタン(78、80)を操作性よく的確に選択することができる。
本発明による電動作業機は、好ましくは、前記操作部(78A、80A)の大きさは、高速の回転速度を設定するスイッチのものほど大きい。
この構成によれば、作業者は目視によって設定すべき回転速度の操作ボタン(78、80)をより一層的確に選択することができる。
本発明による電動作業機は、好ましくは、前記速度設定装置は前記作業部用電動モータ(6)の最高回転速度を設定するものであり、更に、前記作業部用電動モータ(6)のオン・オフを行うオン・オフスイッチ(71)及び前記オン・オフスイッチの操作子(50)が前記ハンドル(20)に設けられている。
この構成によれば、最高回転速度の設定とは別に、操作子(50)の操作によって作業部用電動モータ(6)のオン・オフを行うことができる。
本発明による電動作業機は、好ましくは、前記オン・オフスイッチ(71)の操作子は左右の端部を前記ハンドル(20)に回動可能に取り付けられて左右方向に延在する門形の操作レバー(50)であり、前記複数の操作ボタン(78、80)は、前記ハンドル(20)の左右方向の中央部に配置されている。
この構成によれば、操作ボタン(78、80)による刈刃(3)の最高回転速度の切替操作と、操作レバー(50)による刈刃(3)の回転・停止とをハンドル(20)の部分において総括して行うことができる。
本発明による電動式作業機は、前記作業部として芝刈り用の刈刃(3)を含む。
この構成によれば、電動芝刈機が構成される。
本発明による電動芝刈機によれば、刈刃の回転速度を可変設定でき、しかもその操作が操作性よく的確に行われる。
以下に、本発明による電動式作業機を電動芝刈機に適用した一つの実施形態を、図1〜図14を参照して説明する。
図1及び図2に示されているように、電動芝刈機1は、本体2と、本体2に設けられた刈刃(カッタブレード)3と、本体2に回転可能に支持された左右一対の前輪4及び後輪5と、本体2に設けられて刈刃3を駆動する刈刃用電動モータ(作業部用電動モータ)6と、後輪5を駆動する走行用電動モータ7とを有する。
刈刃3は、本体2の底部に設けられて下方に向けて開口した刈刃室8に略水平に回転可能に配置され、刈刃用電動モータ6の出力軸9の下端に固定され、出力軸9によって垂直軸線周りに回転駆動される。本体2の後部には刈刃3によって刈り取られた芝を回収するグラスバッグ10が設けられている。
本体2には刈刃用電動モータ6及び走行用電動モータ7を制御する制御装置11が設けられている。本体2には、刈刃用電動モータ6、走行用電動モータ7及び制御装置11に電力を供給するバッテリ12が搭載されている。
本体2にはハンドル20が取り付けられている。ハンドル20は、金属パイプ製で、各々本体2に固定される基端を有して本体2から後上方に延在する左右の縦部材(縦バー)20A、20Bと、縦部材20A、20Bの遊端を互いに接続して左右方向に延在する横部材(横バー)20Cとによって門形をなすハンドルバー21と、横部材20Cに取り付けられたループハンドル22とを含む。
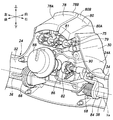
ループハンドル22は、樹脂成形品であり、図3に示されているように、左右の縦部材20A、20Bの各々の遊端近傍に嵌合して縦部材20A、20Bに固定されるC字形横断面の左右の固定部23と、横部材20C(図1参照)の後方を左右方向に延在して左右の端部を各々対応する側の固定部23の後端に結合された下側バー24と、下側バー24の左右の端部近傍から立ち上がった左右の側部バー26と、左右方向に延在して左右の端部を各々対応する側の各側部バー26の上端に結合された上側バー28とを含み、下側バー24と左右の側部バー26と上側バー28とで正面視で略矩形のループ状をなし、上側バー28が作業者の手にて握られるハンドル把持部をなしている。
下側バー24は、左右の側部バー26と一体の前側の本体側部材24Aと当該本体側部材24Aの後側に結合されたカバー部材24Bとによる半割り構造の組立体によって構成され、左右方向の中央部に位置する電気ボックス30と、電気ボックス30の左右両側から各々左右方向に延在する左右の筒状部32、34とを有する。
左側の筒状部32は、図6に示されているように、当該筒状部32内を左右方向に延在する左側回転軸(第1の回転軸)36をブラケット33によって水平軸線周りに回転可能に支持している。右側の筒状部34は、図7に示されているように、当該筒状部34内を左右方向に延在する右側回転軸(第2の回転軸)をブラケット35によって左側回転軸36と同一軸線の水平軸線周りに回転可能に支持している。つまり、左右の筒状部32、34は、左側回転軸36と右側回転軸38とを同一軸線上に個別に回転可能に支持している。以下、左側回転軸36及び右側回転軸38の中心軸線を総括して第1の中心軸線Xaと称する。
左側回転軸36は後述する第1の回転位置と当該第1の回転位置から所定の回転角だけ第2の回転位置との間を回転可能であり、右側回転軸38は後述する第3の回転位置と当該第3の回転位置から所定の回転角だけ第2の回転位置との間を回転可能である。左側回転軸36と右側回転軸38とを総括的に見れば、第1の回転位置と第3の回転位置とは同じ回転位置であり、第2の回転位置と第4の回転位置とは同じ回転位置である。
左側回転軸36は、樹脂成形品であり、外端(左端)に一体成形された左側レバー支持ブロック44を一体形成されている。右側回転軸38は、樹脂成形品であり、外端(右端)に一体成形された右側レバー支持ブロック46を有する。左側回転軸36の外端近傍の外周にはレバー支持カラー部材48が貫通孔49をもって第1の中心軸線Xa周りに回転可能に嵌合した状態で取り付けられている。
左側レバー支持ブロック44及び右側レバー支持ブロック46には刈刃操作レバー(第1の操作レバー)50の左右の端部が、レバー支持カラー部材48及び右側レバー支持ブロック46には走行操作レバー(第2の操作レバー)52の左右の端部が各々取り付けられている。
刈刃操作レバー50及び走行操作レバー52と、左側レバー支持ブロック44、右側レバー支持ブロック46及びレバー支持カラー部材48との連結構造の詳細を、図4及び図6〜図13を参照して説明する。
刈刃操作レバー50は、円形断面の金属製ロッドによる折曲形成品であり、左右の端部において各々第1の中心軸線Xa方向に延在する左右の軸部50A、50Bと、軸部50A、50Bの各々の外端から直角上方に折曲して第1の中心軸線Xaの外方(上方)に延在する左右の係合脚部50C、50Dと、係合脚部50C、50Dの各々の上端から更に上方に延在する左右の側部50E、50Fと、側部50E、50Fの上端から左右方向に折曲して上側バー28の後側を左右方向に延在するレバー把持部50Gとを一体に有して正面視で略門形をなし、左右の係合脚部50C、50Dが互いに離接方向のばね性を有する。刈刃操作レバー50の後側には軸部50A、50Bを除く部分を被覆する樹脂成形品による外装カバー54が装着されている。
左側レバー支持ブロック44及び右側レバー支持ブロック46には、各々、第1の中心軸線Xa上において刈刃操作レバー50の軸部50A、50Bが回転変位可能に嵌合する丸孔による外端側開口の軸受孔56、58が形成されている。左側レバー支持ブロック44の外端面、つまり軸受孔56、58が開口した端面には軸受孔56から左側回転軸36の径方向外方(上方)に延在して係合脚部(第1のロッド)50Cが係合する係合凹部(第1の係合凹部)60が形成されている。右側レバー支持ブロック46の外端面には係合脚部50Dが当接するカム面62が形成されている。係合脚部50Cは刈刃操作レバー50自体のばね力によって係合凹部60の底部に押し付けられ、係合脚部50Dは刈刃操作レバー50自体のばね力によってカム面62に押し付けられている。
刈刃操作レバー50は、軸部50A、50Bが軸受孔56、58に嵌合することにより、左側回転軸36及び右側回転軸38に対して第1の中心軸線Xa周りに回転変位可能で、係合脚部50Cが刈刃操作レバー50自体のばね力によって係合凹部60に係合することにより左側回転軸36に力伝達可能に連結されている。
刈刃操作レバー50は、係合脚部50Cが係合凹部60に係合した状態で、つまり、刈刃操作レバー50と左側回転軸36とが力伝達可能に連結された状態で、軸部50A、50Bを支点として第1の中心軸線Xa周りに図10で見て時計廻り方向に回動(後傾)して、図10に仮想線によって示されているように、レバー把持部50Gが上側バー28から離間した位置(以降、オフ位置と称する)と、オフ位置から第1の中心軸線Xa周りに図10で見て反時計廻り方向に回動(前傾)して、図10に実線によって示されているように、レバー把持部50Gが上側バー28に近接した位置(以降、オン位置と称する)との間を回動可能である。
左側回転軸36が第1の回転位置にあるときには刈刃操作レバー50はオフ位置に位置し、左側回転軸36が第2の回転位置にあるときには刈刃操作レバー50はオン位置に位置する。左側回転軸36の第1の回転位置及び刈刃操作レバー50のオフ位置は、図10に示されているように、左側レバー支持ブロック44に形成されたストッパ面44Aが本体側部材24Aに形成されたストッパ面25Aに当接すること及びオフ位置に位置している走行操作レバー52に刈刃操作レバー50が当接することにより設定され、刈刃操作レバー50のオン位置は、外装カバー54がループハンドル22に当接することにより設定される。
左側回転軸36と下側バー24との間には、左側回転軸36を図10で見て時計廻り方向に付勢する捩りコイルばね66(図5参照)が取り付けられている。これにより、刈刃操作レバー50は、捩りコイルばね66によって左側回転軸36と共にオフ位置へ向けて付勢され、外力が加わらない自由状態においてオフ位置に位置する。
係合凹部60は、図6に示されているように、前側の障壁面60Aと後側の傾斜面60Bとによって画定されている。これにより、刈刃操作レバー50に前傾方向の大きい外力が作用しても障壁面60Aと係合脚部50Cとの当接によって係合脚部50Cが係合凹部60より抜け出すことはなく、また、刈刃操作レバー50に作用する後傾方向の外力が捩りコイルばね66による付勢力未満の既定値未満であれば、係合脚部50Cが係合凹部60から抜け出すことはないが、刈刃操作レバー50に作用する後傾方向の外力が既定値以上になると、刈刃操作レバー50自体が弾性変形しつつ係合脚部50Cが傾斜面60Bに沿って滑り移動することにより係合脚部50Cが係合凹部60から抜け出し、刈刃操作レバー50が反力増加のもとにオフ位置を超えて後傾する。
このようにして、第1の離脱機構(トルクリミッタ)が構成され、刈刃操作レバー50に既定値以上の後傾方向の外力が作用しない限り刈刃操作レバー50と左側回転軸36とが力伝達可能に連結され、刈刃操作レバー50に既定値以上、つまり、捩りコイルばね68による付勢力より大きい過大な後傾方向の外力が作用すると、刈刃操作レバー50と左側回転軸36との力伝達関係が解除されることにより、刈刃操作レバー50が左側回転軸36に対して後傾方向に相対回転可能になる。第1の離脱機構は、刈刃操作レバー50自体のばね力を利用しているから、ばね部材が必要でなく、構造が簡素化される。
カム面62は、図7に示されているように、第1の中心軸線Xaに直交する前側の直交面62Aと後方に向けて上り勾配の後側の傾斜面62Bとによって画定されている。刈刃操作レバー50がオフ位置とオフ位置との間隔を回動している場合には係合脚部50Cは直交面62Aに摺接することにより、刈刃操作レバー50は左側回転軸36に対して自由に相対回転し、刈刃操作レバー50によって左側回転軸36が回動されることない。刈刃操作レバー50に作用する後傾方向の外力が既定値以上になると、側部50Fが弾性変形しつつ係合脚部50Dが傾斜面62Bに乗り上がって滑ることにより、刈刃操作レバー50が反力の増加のもとにオフ位置を超えて後傾する。
走行操作レバー52は、円形断面の金属製ロッドによる折曲形成品であり、左右の端部において各々第1の中心軸線Xaの後方に平行にオフセットされた第2の中心軸線Xb方向に延在する左右の軸部52A、52Bと、軸部52A、52Bの各々の外端から直角上方に折曲して第2の中心軸線Xbの外方(上方)に延在する左右の係合脚部52C、52Dと、係合脚部52C、52Dの各々の上端から更に上方に延在する左右の側部52E、52Fと、側部52E、52Fの上端から左右方向に折曲して上側バー28の後側を左右方向に延在するレバー把持部52Gとを一体に有して正面視で略門形をなし、左右の係合脚部52C、52Dが互いに離接方向のばね性を有する。走行操作レバー52の後側には軸部52A、52Bを除く部分を被覆する樹脂成形品による外装カバー64が装着されている。
レバー支持カラー部材48及び右側レバー支持ブロック46には、各々、第2の中心軸線Xb上において走行操作レバー52の軸部52A、52Bが回転変位可能に嵌合する丸孔による外端側開口の軸受孔65、67が形成されている。右側レバー支持ブロック46の軸受孔67はもう一つの軸受孔56に対して後方且つ左右方向内方にオフセットされた位置にある。
レバー支持カラー部材48の外端面、つまり軸受孔65が開口した端面には軸受孔65から右側回転軸38の径方向外方(上方)に延在して係合脚部(第2のロッド)52Cが係合する略半円溝形状の係合凹部(第2の係合凹部)70が形成されている。右側レバー支持ブロック46には軸受孔67の開口端から右側回転軸38の径方向外方(上方)に延在して係合脚部(第2のロッド)52Dが係合する略半円溝形状の係合凹部(第2の係合凹部)72が形成されている。係合脚部52C、52Dは走行操作レバー52自体のばね力によって係合凹部70、72の底部に押し付けられている。
走行操作レバー52は、軸部52A、52Bが軸受孔65、67に嵌合することにより、右側レバー支持ブロック46と共に、左側回転軸36及び右側回転軸38に対して第2の中心軸線Xb周りに回転変位可能で、係合脚部52Dが係合凹部70に係合することにより右側回転軸38に力伝達可能に連結されている。
走行操作レバー52は、係合脚部52C、52Dが各々係合凹部70、72に係合した状態で、つまり、走行操作レバー52と右側回転軸38とが力伝達可能に連結された状態で、軸部52A、52Bを支点として第2の中心軸線Xb周りに図11で見て時計廻り方向に回動(後傾)して、図11に仮想線により示されているように、レバー把持部52Gが上側バー28から離間した位置(以降、オフ位置と称する)と、オフ位置から第2の中心軸線Xb周りに図11で見て反時計廻り方向に回動(前傾)して、図11に実線により示されているように、レバー把持部52Gが上側バー28に近接した位置(以降、オン位置と称する)との間を回動可能である。
右側回転軸38が第3の回転位置にあるときには走行操作レバー52はオフ位置に位置し、右側回転軸38が第4の回転位置にあるときには走行操作レバー52はオン位置に位置する。右側回転軸38の第3の回転位置及び走行操作レバー52のオフ位置は、図11及び図13に示されているように、右側レバー支持ブロック46及びレバー支持カラー部材48の各々に形成されたストッパ面46A、48Aが本体側部材24Aに形成されたストッパ面25B、25Cに対応するもの同士で当接することにより設定され、走行操作レバー52のオン位置は、外装カバー64がオン位置にある刈刃操作レバー50の外装カバー54に当接することにより設定される。
右側回転軸38と下側バー24との間には、右側回転軸38を図10で見て時計廻り方向に付勢する捩りコイルばね68(図5参照)が取り付けられている。これにより、走行操作レバー52は、捩りコイルばね68によって右側回転軸38と共にオフ位置へ向けて付勢され、外力が加わらない自由状態においてオフ位置に位置する。
係合凹部70の開口部の前側には左側回転軸36があり、係合凹部72の開口部の前側には右側レバー支持ブロック46の後面による障壁面46Bが存在するので、走行操作レバー52に前傾方向の大きい外力が作用しても左側回転軸36と係合脚部52Cとの当接及び障壁面46Bと係合脚部52Dとの当接によって係合脚部52C、52Dが係合凹部70、72から抜け出すことはなく、また、走行操作レバー52に作用する後傾方向の外力が捩りコイルばね68による付勢力未満の既定値未満であれば、係合脚部52C、52Dが係合凹部70、72から抜け出すことはないが、走行操作レバー52に作用する後傾方向の外力が既定値以上になると、側部50E、50Fが弾性変形しつつ係合脚部52C、52Dが係合凹部70、72から抜け出し、走行操作レバー52が反力の増加のもとにオフ位置を超えて後傾する。
このようにして、第2の離脱機構(トルクリミッタ)が構成され、走行操作レバー52に既定値以上の後傾方向の外力が作用しない限り走行操作レバー52と右側回転軸38とが力伝達可能に連結され、走行操作レバー52に、既定値以上、つまり捩りコイルばね68による付勢力より大きい過大な後傾方向の外力が作用すると、走行操作レバー52と右側回転軸38との力伝達関係が解除されることにより、走行操作レバー52が右側回転軸38に対して後傾方向に相対回転可能になる。第2の離脱機構は、走行操作レバー52自体のばね力を利用しているから、ばね部材が必要でなく、構造が簡素化される。
正面視で、刈刃操作レバー50は側部52E、52Fが直線の単純な門形であるのに対して走行操作レバー52の側部52E、52Fが階段状(凸状)であることにより、刈刃操作レバー50のレバー把持部50Gは左右方向の中央部A(図4参照)においてのみ走行操作レバー52のレバー把持部52Gと重なる。これにより、作業者は、刈刃操作レバー50のレバー把持部50Gの中央部Aにおいて刈刃操作レバー50のレバー把持部50Gと走行操作レバー52のレバー把持部52Gとを共に握ることができ、刈刃操作レバー50のレバー把持部50Gの左右両側部B(図4参照)においては、当該レバー把持部50Gのみを握ることができる。
つまり、刈刃操作レバー50と走行操作レバー52とは、当該双方を共に握られ得る中央部Aと、走行操作レバー52のみが握られ得る左右両側部Bとが構成されるように、正面視で互い異なる形状をしている。
刈刃操作レバー50の外装カバー54は上部及び左右両側において走行操作レバー52の外装カバー64に前方から重合する部分を有するから、換言すると、走行操作レバー52の外装カバー64は上部及び左右両側において刈刃操作レバー50の外装カバー54に後方から重合する部分を有するから、刈刃操作レバー50はオフ位置への回動において外装カバー54、64を介して走行操作レバー52に当接し、走行操作レバー52はオン位置への回動において外装カバー54、64を介して刈刃操作レバー50に当接するから、刈刃操作レバー50と走行操作レバー52の双方がオン位置に位置することができるが、走行操作レバー52のみがオン位置に位置することはできない。つまり、走行操作レバー52のみがオン位置に位置することが禁止される。
なお、外装カバー64は左右両側において外装カバー54に後方から重合する部分の内側に耳片状の操作部64Aを含む。走行操作レバー52がオフ位置にある時に操作部64Aが前方(オン位置側)に押されることにより、走行操作レバー52によって押されるようにして刈刃操作レバー50もオン位置側に移動する。
図4、図5に示されているように、電気ボックス30の左側には刈刃オン・オフスイッチ71が設けられている。刈刃オン・オフスイッチ71は、刈刃用電動モータ6のためのモータ駆動指令装置であり、左側回転軸36の内端に取り付けられた操作アーム73によって操作され、刈刃操作レバー50がオフ位置にある時にはオフ状態で、刈刃操作レバー50がオフ位置から外れたオン位置側にある時にはオン状態である。
電気ボックス30の中央部には高速設定用スイッチ74及び低速設定用スイッチ76が設けられている。高速設定用スイッチ74及び低速設定用スイッチ76は、モメンタリースイッチであり、オン信号を制御装置11に出力することにより、刈刃3の回転速度を高速と低速の2段階に切り替える。
高速設定用スイッチ74及び低速設定用スイッチ76は電気ボックス30の上部に左右に並べて配置された押しボタン78、80によって操作される。押しボタン78、80は、電気ボックス30に固定されたボタン支持体75に共通の水平な枢軸79によって後側を枢支され、捩りコイルばね81のばね力によって上方に付勢されている。押しボタン78、80の上面(押圧面)78A、80Aは各々電気ボックス30の上部に上向きに露呈している。上面78A、80Aは各々前後に長い矩形をしていて左右に隣接して配置されている。上面78A、80Aの前後の長さは互いに同じであるが、上面78Aの左右幅が上面80Aの左右幅よりも大きい。つまり、高速設定用スイッチ74の押しボタン78は低速設定用スイッチ76の押しボタン80より押圧面が大きくなっている。上面78A、80Aの前側には滑り止め用のランド部78B、80Bが突出形成されている。
電気ボックス30の右側には走行速度設定用のポテンショメータ82が設けられている。ポテンショメータ82は、走行用電動モータ7のためのモータ駆動指令装置であり、右側回転軸38の内端に取り付けられた操作アーム84によって操作され、走行操作レバー52がオフ位置にある時にはゼロ状態で走行停止指令を出力し、走行操作レバー52がオン位置に向けて前傾される角度の増大に応じて走行速度を増大する走行指令を出力する。
電気ボックス30の中央部には最高走行速度設定用のポテンショメータ86が設けられている。ポテンショメータ86は電気ボックス30の正面(作業者から見て正面)に設けられたダイヤル88によって操作され、正面から見てダイヤル88が時計廻り方向に回されるほど、最高値走行速度を高速に設定する指令を出力する。
電気ボックス30内には隔壁による防止室90が画定されており、ポテンショメータ82、86は高度の防水性を確保すべく防止室90内に配置されている。
電気ボックス30に配置された刈刃オン・オフスイッチ71、高速設定用スイッチ74、低速設定用スイッチ76、ポテンショメータ82、86は、縦部材20A、20B及び横部材20Cのパイプ内に通されたワイヤハーネス(不図示)によって制御装置11に電気的に接続されている。
制御装置11は、マイクロコンピュータやROM、RAM、周辺回路、入出力インタフェース等から構成された電子制御回路(ECU)であり、図14に示されているように、刈刃オン・オフスイッチ71、高速設定用スイッチ74、低速設定用スイッチ76から信号を入力して刈刃用電動モータ6のオン・オフ制御及び回転速度制御を行う刈刃制御部100と、刈刃制御部100からの指令に基づいてPWM制御等によってバッテリ12からの電力を制御する電力制御部102とを有し、電力制御部102から刈刃用電動モータ6に電力を供給する。
制御装置11は、更に、ポテンショメータ82、86から信号を入力して走行用電動モータ7のオン・オフ制御及び回転速度制御を走行制御部104と、走行制御部104からの指令に基づいてPWM制御等によってバッテリ12からの電力を制御する電力制御部106とを有し、電力制御部106から走行用電動モータ7に電力を供給する。
刈刃オン・オフスイッチ71、高速設定用スイッチ74、低速設定用スイッチ76、ポテンショメータ82、86の全てが左右方向中央部にある電気ボックス30に集中して配置されているので、それらの配置のために刈刃操作レバー50及び走行操作レバー52の回動支点部が大型化することがない。このことにより、操作スペースの低減が少なくなり、操作スペースの低減によって操作レバー50、52の操作性が悪化したり、意匠性が低下したりすることがない。また、この集中配置によりワイヤハーネスの取り回しが簡素になり、メンテナンス性も向上する。
また、高速設定用スイッチ74、低速設定用スイッチ76や最高走行速度設定用のポテンショメータ86等の制御機能の追加のためのスイッチやポテンショメータ及びそれの操作子である押しボタン78、80、ダイヤル88の追加を操作レバー50、52の回動支点部の大型化を招くことなく高い設計の自由度をもって容易に行うことができる。
上述の構成による電動芝刈機1は、刈刃操作レバー50及び走行操作レバー52の双方が手放される状態では、刈刃操作レバー50及び走行操作レバー52が各々捩りコイルばね66、68のばね力によってオフ位置に位置することにより、刈刃オン・オフスイッチ71がオフ状態で、刈刃用電動モータ6が停止し、刈刃3の回転が停止していると共に、ポテンショメータ82がゼロ状態(走行停止指令の出力)で、走行用電動モータ7が停止し、電動芝刈機1の走行が停止する。
刈刃操作レバー50のレバー把持部50Gの中央部において刈刃操作レバー50のレバー把持部50Gと走行操作レバー52のレバー把持部52Gとが作業者によって共に握られ、刈刃操作レバー50及び走行操作レバー52が捩りコイルばね66、68のばね力に抗してオフ位置からオン位置に向けて前傾されると、刈刃オン・オフスイッチ71がオン状態になることによって刈刃用電動モータ6が高速設定用スイッチ74及び低速設定用スイッチ76によって決められた最高速度で回転し、刈刃3が回転すると共に、ポテンショメータ82が走行操作レバー52の前傾角度に応じた走行指令を出力することによって走行用電動モータ7が走行指令に応じた回転速度によって回転し、電動芝刈機1が走行操作レバー52の前傾角度に応じた速度で前進走行する。これにより、電動芝刈機1は前進走行しながら芝刈りを行う。走行操作レバー52がオン位置に位置すると、電動芝刈機1はポテンショメータ86によって設定される最高速度をもって前進走行する。
前進走行中を含めてポテンショメータ86のダイヤル88を廻すことにより、電動芝刈機1の最高走行速度を変更できる。また、押しボタン78或いは80を押すことにより、刈刃3の回転速度を高速或いは低速に切り替えることができる。ダイヤル88及び押しボタン78、80は、刈刃操作レバー50、走行操作レバー52のレバー把持部50G、52Gの下方の左右方向中央部に集中して存在するので、作業者は、片手で刈刃操作レバー50、走行操作レバー52を握った状態でも、もう片手で、これらダイヤル88、押しボタン78、80の操作を操作性よく容易に行うことができる。また、刈刃操作レバー50の操作による刈刃3の始動と同時に押しボタン78、80の操作によって刈刃3の回転速度を切替設定することができる。
しかも、高速設定用スイッチ74の押しボタン78の上面78Aは低速設定用スイッチ76の押しボタン80の上面80Aより横幅が大きくなっているので、作業者は、押しボタン78、80の上面78A、80Aの面積の差によって、高速設定用スイッチ74の押しボタン78であるか、低速設定用スイッチ76の押しボタン80であるかを目視によって簡単且つ確実に判別することができる。
走行操作レバー52が手放されて走行操作レバー52がオフ位置に戻ると、走行用電動モータ7が停止することにより、電動芝刈機1の走行が停止する。この状態の時に、刈刃操作レバー50がオン位置にあれば、刈刃用電動モータ6によって刈刃3が回転し、電動芝刈機1の走行が止まった状態で芝刈りが行われる。
前述した刈刃操作レバー50と走行操作レバー52との干渉により、走行操作レバー52のみがオン位置に位置することが禁止されているので、刈刃3の回転が止まっている時、つまり芝刈作業が行われてない時に、電動芝刈機1が走行用電動モータ7によって電動走行することがない。これによりバッテリ12の電力消費を節減できる。なお、刈刃3の回転が止まっている状態の時には、つまり、芝刈作業が行われてない時には、電動芝刈機1は手押しによって移動できる。
刈刃操作レバー50に誤って過大な後傾方向の外力が作用した時には、係合脚部50Cが係合凹部60から抜け出すことにより、刈刃操作レバー50と左側回転軸36との力伝達関係が解除され、刈刃操作レバー50がオフ位置を超えて、左側回転軸36に対して後傾方向に相対回転するので、刈刃操作レバー50やオフ位置を設定するストッパ面44A、46A、48Aとストッパ面25A、25B、25Bとに過大な荷重が作用することがない。
また、走行操作レバー52に誤って過大な後傾方向の外力が作用した時には、係合脚部52C、52Dが係合凹部72、72から抜け出すことにより、走行操作レバー52と右側回転軸38との力伝達関係が解除され、走行操作レバー52がオフ位置を超えて左側回転軸36に対して後傾方向に相対回転するので、走行操作レバー52やオフ位置を設定するストッパ面44A、46A、48Aとストッパ面25A、25B、25Bとに過大な荷重が作用することがない。
これらのことにより、作業者が刈刃操作レバー50や走行操作レバー52を誤って過大な力で後傾させても、オフ位置を設定するストッパ機構や刈刃操作レバー50、走行操作レバー52が変形したり、破損したりすることが回避される。また、オフ位置を設定するストッパ機構の小型化ならびに刈刃操作レバー50及び走行操作レバー52の小型化が可能になると共に、刈刃操作レバー50及び走行操作レバー52のデザインの自由度が向上し、ループハンドル22と刈刃操作レバー50及び走行操作レバー52とに一体感があり、握り心地がよい操作部とすることができる。
刈刃操作レバー50及び走行操作レバー52がオフ位置を超えて後傾する時には、これら操作レバー50、52の操作に対する反力が増大し、操作に必要な力が増大するから、ブレーキ作用が得られると共に作業者は、これら操作レバー50、52がオフ位置を超えて後傾したこと、つまり、正規の回転角以上に回動することを知ることができる。
また、刈刃操作レバー50がオフ位置を超えて後傾する時には、係合脚部50C、50Dが傾斜面60B、62Bに乗り上げることによるディテント機構が構成される。これにより、刈刃操作レバー50がオフ位置を超えて後傾する時に節度感が得られ、作業者は、このことによっても、刈刃操作レバー50がオフ位置を超えて後傾したこと、つまり、正規の回転角以上に回動することを知ることができる。
また、走行操作レバー52がオフ位置を超えて後傾する時には係合脚部52C、52Dが係合凹部70、72から抜け出すことによるディテント機構が構成される。走行操作レバー52がオフ位置を超えて後傾する時に節度感が得られ、作業者は、このことによって、走行操作レバー52がオフ位置を超えて後傾したこと、つまり、正規の回転角以上に回動することを知ることができる。
以上、本発明を、その好適な実施形態について説明したが、当業者であれば容易に理解できるように、本発明はこのような実施形態により限定されるものではなく、本発明の趣旨を逸脱しない範囲で適宜変更可能である。
例えば、刈刃操作レバー50及び走行操作レバー52は前後反転してループハンドル22の前側に配置されてもよい。この場合には、刈刃操作レバー50及び走行操作レバー52は、前傾によってオフ位置に位置し、後傾によってオン位置に位置する。また刈刃操作レバー50及び走行操作レバー52の機能を相互に変更することも可能である。押しボタン78、80の上面78A、80Aの形状は矩形に限られることなく、図15、図16に示されているように、二つの上面78A、80Aによって円形や楕円形をなし、上面78Aと80Aとが不等分されていてもよい。刈刃3の回転速度を設定するスイッチの個数は2個に限られることなく、3個以上の複数でもよい。
本発明による電動式作業機は電動芝刈機に限られることなく、電動除雪機や電動耕耘機等にも同様に適用可能である。
また、上記実施形態に示した構成要素は必ずしも全てが必須なものではなく、本発明の趣旨を逸脱しない限りにおいて適宜取捨選択することが可能である。
1 :電動芝刈機
2 :本体
3 :刈刃
4 :前輪
5 :後輪
6 :刈刃用電動モータ
7 :走行用電動モータ
8 :刈刃室
9 :出力軸
10 :グラスバッグ
11 :制御装置
12 :バッテリ
20 :ハンドル
20A :縦部材
20B :縦部材
20C :横部材
21 :ハンドルバー
22 :ループハンドル
23 :固定部
24 :下側バー
24A :本体側部材
24B :カバー部材
25A :ストッパ面
25B :ストッパ面
25C :ストッパ面
26 :側部バー
28 :上側バー
30 :電気ボックス
32 :筒状部
33 :ブラケット
34 :筒状部
35 :ブラケット
36 :左側回転軸
38 :右側回転軸
42 :ブラケット
44 :左側レバー支持ブロック
44A :ストッパ面
46 :右側レバー支持ブロック
46A :ストッパ面
46B :障壁面
48 :レバー支持カラー部材
48A :ストッパ面
49 :貫通孔
50 :刈刃操作レバー
50A :軸部
50B :軸部
50C :係合脚部
50D :係合脚部
50E :側部
50F :側部
50G :レバー把持部
51 :外装カバー
52 :走行操作レバー
52A :軸部
52B :軸部
52C :係合脚部
52D :係合脚部
52E :側部
52F :側部
52G :レバー把持部
54 :外装カバー
56 :軸受孔
58 :軸受孔
60 :係合凹部
60A :障壁面
60B :傾斜面
62 :カム面
62A :直交面
62B :傾斜面
64 :外装カバー
64A :操作部
65 :軸受孔
66 :捩りコイルばね
67 :軸受孔
68 :捩りコイルばね
70 :係合凹部
71 :刈刃オン・オフスイッチ
72 :係合凹部
73 :操作アーム
74 :高速設定用スイッチ
75 :ボタン支持体
76 :低速設定用スイッチ
78 :押しボタン
78A :上面
78B :ランド部
79 :枢軸
80 :押しボタン
80A :上面
80B :ランド部
81 :捩りコイルばね
82 :ポテンショメータ
84 :操作アーム
86 :ポテンショメータ
88 :ダイヤル
90 :防止室
100 :刈刃制御部
102 :電力制御部
104 :走行制御部
106 :電力制御部
Xa :第1の中心軸線
Xb :第2の中心軸線
2 :本体
3 :刈刃
4 :前輪
5 :後輪
6 :刈刃用電動モータ
7 :走行用電動モータ
8 :刈刃室
9 :出力軸
10 :グラスバッグ
11 :制御装置
12 :バッテリ
20 :ハンドル
20A :縦部材
20B :縦部材
20C :横部材
21 :ハンドルバー
22 :ループハンドル
23 :固定部
24 :下側バー
24A :本体側部材
24B :カバー部材
25A :ストッパ面
25B :ストッパ面
25C :ストッパ面
26 :側部バー
28 :上側バー
30 :電気ボックス
32 :筒状部
33 :ブラケット
34 :筒状部
35 :ブラケット
36 :左側回転軸
38 :右側回転軸
42 :ブラケット
44 :左側レバー支持ブロック
44A :ストッパ面
46 :右側レバー支持ブロック
46A :ストッパ面
46B :障壁面
48 :レバー支持カラー部材
48A :ストッパ面
49 :貫通孔
50 :刈刃操作レバー
50A :軸部
50B :軸部
50C :係合脚部
50D :係合脚部
50E :側部
50F :側部
50G :レバー把持部
51 :外装カバー
52 :走行操作レバー
52A :軸部
52B :軸部
52C :係合脚部
52D :係合脚部
52E :側部
52F :側部
52G :レバー把持部
54 :外装カバー
56 :軸受孔
58 :軸受孔
60 :係合凹部
60A :障壁面
60B :傾斜面
62 :カム面
62A :直交面
62B :傾斜面
64 :外装カバー
64A :操作部
65 :軸受孔
66 :捩りコイルばね
67 :軸受孔
68 :捩りコイルばね
70 :係合凹部
71 :刈刃オン・オフスイッチ
72 :係合凹部
73 :操作アーム
74 :高速設定用スイッチ
75 :ボタン支持体
76 :低速設定用スイッチ
78 :押しボタン
78A :上面
78B :ランド部
79 :枢軸
80 :押しボタン
80A :上面
80B :ランド部
81 :捩りコイルばね
82 :ポテンショメータ
84 :操作アーム
86 :ポテンショメータ
88 :ダイヤル
90 :防止室
100 :刈刃制御部
102 :電力制御部
104 :走行制御部
106 :電力制御部
Xa :第1の中心軸線
Xb :第2の中心軸線
Claims (5)
- 電動作業機であって、
本体と、
前記本体に設けられた作業部及び車輪と、
前記本体に設けられ、前記作業部を駆動する作業部用電動モータと、
前記本体から後方に延出する縦部材を含むハンドルと、
前記ハンドルに設けられ、前記作業部用電動モータの回転速度を設定する速度設定装置とを有し、
前記速度設定装置は、
互いに異なる回転速度を設定する複数のスイッチと、
前記複数のスイッチ毎に設けられた複数の操作ボタンとを有し、
前記複数の操作ボタンは、操作部の大きさが互いに異なっている電動作業機。 - 前記操作部の大きさは、高速の回転速度を設定するスイッチのものほど大きい請求項1に記載の電動作業機。
- 前記速度設定装置は前記作業部用電動モータの最高回転速度を設定するものであり、
更に、前記作業部用電動モータのオン・オフを行うオン・オフスイッチ及び前記オン・オフスイッチの操作子が前記ハンドルに設けられている請求項1または2に記載の電動作業機。 - 前記オン・オフスイッチの操作子は左右の端部を前記ハンドルに回動可能に取り付けられて左右方向に延在する門形の操作レバーであり、
前記複数の操作ボタンは、前記ハンドルの左右方向の中央部に配置されている請求項3に記載の電動作業機。 - 前記作業部は芝刈り用の刈刃を含む請求項1から4の何れか一項に記載の電動式作業機。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016232330A JP2018088833A (ja) | 2016-11-30 | 2016-11-30 | 電動式作業機 |
| US16/463,950 US11337369B2 (en) | 2016-11-30 | 2017-11-17 | Electric power equipment |
| EP17876961.8A EP3549431B1 (en) | 2016-11-30 | 2017-11-17 | Electrical work machine |
| PCT/JP2017/041499 WO2018101086A1 (ja) | 2016-11-30 | 2017-11-17 | 電動式作業機 |
| CN201780073251.4A CN110022671A (zh) | 2016-11-30 | 2017-11-17 | 电动式作业机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016232330A JP2018088833A (ja) | 2016-11-30 | 2016-11-30 | 電動式作業機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018088833A true JP2018088833A (ja) | 2018-06-14 |
Family
ID=62241451
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016232330A Pending JP2018088833A (ja) | 2016-11-30 | 2016-11-30 | 電動式作業機 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11337369B2 (ja) |
| EP (1) | EP3549431B1 (ja) |
| JP (1) | JP2018088833A (ja) |
| CN (1) | CN110022671A (ja) |
| WO (1) | WO2018101086A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018088833A (ja) * | 2016-11-30 | 2018-06-14 | 本田技研工業株式会社 | 電動式作業機 |
| US11051450B2 (en) | 2018-11-09 | 2021-07-06 | The Toro Company | Walk reel mower with a telescopic handle assembly |
| CN109392467B (zh) | 2018-12-14 | 2024-01-02 | 格力博(江苏)股份有限公司 | 园林工具 |
| WO2020178959A1 (ja) * | 2019-03-04 | 2020-09-10 | 本田技研工業株式会社 | 作業機 |
| CA3154409A1 (en) | 2019-10-11 | 2021-04-15 | Ariens Company | Power source and control system for a lawn mower |
| WO2021120859A1 (en) * | 2019-12-19 | 2021-06-24 | Techtronic Cordless Gp | Electric cultivator |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08259128A (ja) * | 1995-03-23 | 1996-10-08 | Toshiba Elevator Technos Kk | エレベーターのかご操作盤 |
| US6082083A (en) * | 1998-09-18 | 2000-07-04 | The Toro Company | Ground speed control system |
| JP2001113041A (ja) * | 1999-10-15 | 2001-04-24 | Sega Corp | ゲーム装置 |
| JP2007116957A (ja) * | 2005-10-26 | 2007-05-17 | Matsushita Electric Works Ltd | 芝刈機 |
| JP2007195557A (ja) * | 2007-03-08 | 2007-08-09 | Yanmar Agricult Equip Co Ltd | コンバインの操作部構造 |
| JP2013146195A (ja) * | 2012-01-17 | 2013-08-01 | Kubota Corp | 歩行型草刈機 |
| JP2016096805A (ja) * | 2014-11-26 | 2016-05-30 | 株式会社マキタ | 電動機器 |
| JP2016097494A (ja) * | 2014-11-26 | 2016-05-30 | 株式会社マキタ | 電動機器 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0255521U (ja) | 1988-10-17 | 1990-04-23 | ||
| JP2003070168A (ja) | 2001-08-21 | 2003-03-07 | Honda Motor Co Ltd | 電動作業機 |
| US7762050B1 (en) | 2009-03-11 | 2010-07-27 | Honda Motor Co., Ltd. | Bail-free machine control devices and methods |
| CN102686100B (zh) * | 2010-01-13 | 2016-03-30 | 株式会社Ihi | 草坪修剪车辆 |
| WO2011131031A1 (zh) | 2010-04-21 | 2011-10-27 | 苏州宝时得电动工具有限公司 | 割草机和控制割草机自驱操作的控制方法 |
| US9651138B2 (en) * | 2011-09-30 | 2017-05-16 | Mtd Products Inc. | Speed control assembly for a self-propelled walk-behind lawn mower |
| FR3004680B1 (fr) * | 2013-04-23 | 2016-02-26 | France Reducteurs | Dispositif de commande de la vitesse d'un engin a propulsion electrique et engin correspondant |
| US9696749B2 (en) * | 2013-05-24 | 2017-07-04 | Honda Motor Co., Ltd. | Control devices, systems, and methods for self-propelled machinery |
| KR200480534Y1 (ko) * | 2014-01-13 | 2016-06-03 | 박무웅 | 휠 내장 모터를 갖는 전동 킥보드 |
| US9403435B2 (en) * | 2014-10-14 | 2016-08-02 | Honda Motor Co., Ltd. | Adjustable ground speed control devices, systems, and methods for walk-behind equipment |
| JP6454522B2 (ja) * | 2014-11-19 | 2019-01-16 | 株式会社マキタ | 作業機 |
| WO2016106708A1 (en) * | 2014-12-31 | 2016-07-07 | Techtronic Industries Co., Ltd. | Actuation control mechanism for power tool |
| CN204616397U (zh) * | 2015-01-15 | 2015-09-09 | 苏州宝时得电动工具有限公司 | 割草机 |
| CN106171253B (zh) * | 2015-05-05 | 2020-06-23 | 南京德朔实业有限公司 | 割草机 |
| US9968031B2 (en) * | 2015-07-06 | 2018-05-15 | Honda Motor Co., Ltd. | Adjustable ground speed and acceleration control devices, systems, and methods for walk-behind equipment |
| EP3471126B1 (en) * | 2016-06-14 | 2023-08-16 | Globe (Jiangsu) Co., Ltd. | Power device |
| JP2018088833A (ja) * | 2016-11-30 | 2018-06-14 | 本田技研工業株式会社 | 電動式作業機 |
| US11528841B2 (en) * | 2019-08-08 | 2022-12-20 | Honda Motor Co., Ltd. | Adjustable electric control handle for a lawn mower |
| US11464163B2 (en) * | 2019-08-23 | 2022-10-11 | Honda Motor Co., Ltd. | Propulsion control system for a walk-behind self-propelled machine, a lawnmower, and method for controlling a lawnmower |
-
2016
- 2016-11-30 JP JP2016232330A patent/JP2018088833A/ja active Pending
-
2017
- 2017-11-17 CN CN201780073251.4A patent/CN110022671A/zh active Pending
- 2017-11-17 WO PCT/JP2017/041499 patent/WO2018101086A1/ja not_active Ceased
- 2017-11-17 EP EP17876961.8A patent/EP3549431B1/en active Active
- 2017-11-17 US US16/463,950 patent/US11337369B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08259128A (ja) * | 1995-03-23 | 1996-10-08 | Toshiba Elevator Technos Kk | エレベーターのかご操作盤 |
| US6082083A (en) * | 1998-09-18 | 2000-07-04 | The Toro Company | Ground speed control system |
| JP2001113041A (ja) * | 1999-10-15 | 2001-04-24 | Sega Corp | ゲーム装置 |
| JP2007116957A (ja) * | 2005-10-26 | 2007-05-17 | Matsushita Electric Works Ltd | 芝刈機 |
| JP2007195557A (ja) * | 2007-03-08 | 2007-08-09 | Yanmar Agricult Equip Co Ltd | コンバインの操作部構造 |
| JP2013146195A (ja) * | 2012-01-17 | 2013-08-01 | Kubota Corp | 歩行型草刈機 |
| JP2016096805A (ja) * | 2014-11-26 | 2016-05-30 | 株式会社マキタ | 電動機器 |
| JP2016097494A (ja) * | 2014-11-26 | 2016-05-30 | 株式会社マキタ | 電動機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110022671A (zh) | 2019-07-16 |
| US11337369B2 (en) | 2022-05-24 |
| EP3549431A4 (en) | 2020-01-15 |
| US20200375103A1 (en) | 2020-12-03 |
| WO2018101086A1 (ja) | 2018-06-07 |
| EP3549431A1 (en) | 2019-10-09 |
| EP3549431B1 (en) | 2021-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018088832A (ja) | 作業機 | |
| WO2018101086A1 (ja) | 電動式作業機 | |
| JP2018085980A (ja) | 電動式作業機 | |
| JP5935591B2 (ja) | ヘッジトリマ | |
| JP6808194B2 (ja) | 草刈作業機 | |
| US11007586B2 (en) | Portable cutter | |
| JP2014233216A (ja) | 刈払機 | |
| US20150135670A1 (en) | Variable speed control systems and methods for walk behind working machine | |
| JP6976187B2 (ja) | 電動工具 | |
| CN1328945C (zh) | 用于电动工具的启动机构及包含此启动机构的电动工具 | |
| US20240324515A1 (en) | Hedge Trimmer | |
| CN1324944C (zh) | 用于电动工具的把手组件及包含此把手组件的电动工具 | |
| JP5808259B2 (ja) | 歩行型草刈機 | |
| JP5989166B2 (ja) | 作業機の操作装置 | |
| JP2013063024A (ja) | 歩行型電動作業機 | |
| KR101518102B1 (ko) | 예취기 | |
| JP2014138601A (ja) | 歩行型電動作業機 | |
| US20260090497A1 (en) | Working Machine | |
| CN1596587B (zh) | 用于电动工具的把手组件 | |
| JP2010220575A (ja) | 歩行型移動農機 | |
| JPH0741306Y2 (ja) | 歩行型作業機 | |
| JP2020055373A (ja) | 歩行型管理機 | |
| JP2018201416A (ja) | 農作業機用制御装置および草刈り機 | |
| JPH0233891B2 (ja) | Idosagyokinokuratsuchisochi | |
| JP2012086707A (ja) | 歩行型管理機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190917 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200331 |