JP2018090220A - シフトセレクタ装置 - Google Patents
シフトセレクタ装置 Download PDFInfo
- Publication number
- JP2018090220A JP2018090220A JP2016237836A JP2016237836A JP2018090220A JP 2018090220 A JP2018090220 A JP 2018090220A JP 2016237836 A JP2016237836 A JP 2016237836A JP 2016237836 A JP2016237836 A JP 2016237836A JP 2018090220 A JP2018090220 A JP 2018090220A
- Authority
- JP
- Japan
- Prior art keywords
- function
- shift
- range
- automatic
- control function
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/2807—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted using electric control signals for shift actuators, e.g. electro-hydraulic control therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K20/00—Arrangement or mounting of change-speed gearing control devices in vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K20/00—Arrangement or mounting of change-speed gearing control devices in vehicles
- B60K20/02—Arrangement or mounting of change-speed gearing control devices in vehicles of initiating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/60—Instruments characterised by their location or relative disposition in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
- F16H59/10—Range selector apparatus comprising levers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/50—Signals to an engine or motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/175—Autonomous driving
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Arrangement Or Mounting Of Control Devices For Change-Speed Gearing (AREA)
- Control Of Transmission Device (AREA)
Abstract
Description
本開示の第一実施形態によるシフトセレクタ装置10は、運転席及び助手席の間のセンターコンソール又はインスツルメントパネルの中央部分等に設置された操作装置である。シフトセレクタ装置10は、自動運転システム60を備える車両に、スイッチ装置40等と共に搭載されている。自動運転システム60を搭載した車両に適用されるシフトセレクタ装置10には、シフトポジションを選択する通常の選択操作(以下、「シフト操作」)に加えて、自動運転システム60の各制御機能を選択するシフト操作が入力される。
図3〜図6に示す本開示の第二実施形態は、第一実施形態の変形例である。第二実施形態のシフトセレクタ装置210は、第一実施形態とは異なり、自動運転制御装置270の制御機能を、自動運転の自動化レベルを基準として切り替えることができる。自動化レベルは、一例として、アメリカ国家交通安全協会(National Highway Traffic Safety Administration,NHTSA)によって制定された基準に従う。NHTSAの基準による自動化レベルでは、手動運転としての自動化レベル0と、自動運転システム60が作動している自動化レベル1〜4とが規定されている。自動化レベルが高くなるほど、制御対象となる運転操作の種類が多くなるか、又は走行中に運転者に課せられる役割が少なくなる。即ち、自動化レベルの高い制御機能は、自動運転システム60の上位制御機能となる。
図7及び図8に示す本開示の第三実施形態は、第一実施形態の別の変形例である。第三実施形態のシフトセレクタ装置310において、ポジション設定機構312の可動範囲には、第一実施形態のACCレンジ(図1参照)等に替えて、上位切替ポジション19u、ホームポジション19h、及び下位切替ポジション19dが設定されている。
図9及び図10に示す本開示の第四実施形態は、第二実施形態の変形例である。第四実施形態でも、自動運転制御装置270には、表示装置80が接続されている。表示装置80は、自動運転システム60にて利用不可能な自動走行機能及び自動駐車機能を、表示によって運転者に通知する。加えて表示装置80は、起動状態又は作動状態にある自動走行機能又は自動駐車機能を、表示によって運転者に通知する。
図11に示す本開示の第五実施形態は、第二実施形態の別の変形例である。第五実施形態によるシフトセレクタ装置510は、ポジション設定機構512と、セレクタ制御部13、ロック機構14、及びセレクタレバー11とを備える一方で、アクチュエータ機構15(図3参照)に相当する構成を備えていない。
図12に示す本開示の第六実施形態は、第五実施形態の変形例である。第六実施形態によるシフトセレクタ装置610は、ポジション設定機構612と、セレクタ制御部13及びセレクタレバー11とを備える一方で、ロック機構14及びアクチュエータ機構15(図3参照)に相当する構成を備えていない。加えて第六実施形態のポジション設定機構612からは、PAレンジ(図3参照)が省略されている。
図13に示す本開示の第七実施形態は、第一実施形態のさらに別の変形例である。第七実施形態によるシフトセレクタ装置710は、高度運転支援装置770を主体とする自動運転システムに適用されている。高度運転支援装置770は、第一実施形態と実質同一のACC機能部71及びLKA機能部72を有しており、ACC機能及びACC+LKA機能を備えている。一方で、高度運転支援装置770は、AD機能を備えない。
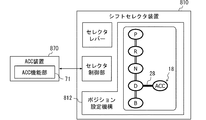
図14に示す本開示の第八実施形態は、第七実施形態の変形例である。第八実施形態によるシフトセレクタ装置810は、ACC装置870を主体とする自動運転システムに適用されている。ACC装置870は、第一実施形態と実質同一のACC機能部71を有しており、ACC機能を備える。シフトセレクタ装置810のポジション設定機構812には、ACC機能を起動させるACCレンジが、起動ポジション18として設けられている。ACCレンジは、Pレンジから直線状に分岐された起動ライン28の終端に設けられている。以上の第八実施形態でも、運転者は、シフトセレクタ装置810へのシフト操作を行うことで、ACC機能の選択及び起動を行うことができる。
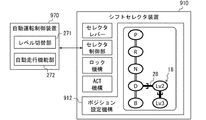
図15に示す本開示の第九実施形態は、第二実施形態のさらに別の変形例である。第九実施形態によるシフトセレクタ装置910は、自動運転制御装置970を主体とする自動運転システムに適用されている。自動運転制御装置970は、自動走行機能としてレベル2機能及びレベル3機能を有している。自動運転制御装置970は、レベル切替部271にて選択された自動化レベル2又は自動化レベル3の自動走行を、自動走行機能部272の制御によって実行できる。一方で、自動走行機能部272は、自動化レベル4の自動走行機能を備えない。加えて自動運転制御装置970からは、自動駐車機能部273(図3参照)が省略されている。
図16に示す本開示の第十実施形態は、第九実施形態の変形例である。第十実施形態によるシフトセレクタ装置1010は、自動運転制御装置1070を主体とする自動運転システムに適用されている。自動運転制御装置1070には、自動化レベル2に相当する自動走行を実現する自動走行機能部272が構築される。以上の自動運転制御装置1070の機能に対応し、ポジション設定機構1012には、Lv2レンジのみが起動ポジション18として設けられている。Lv2レンジは、Dレンジと隣接する配置にて、Dレンジの運転者側に配置されている。以上の第十実施形態でも、運転者は、シフトセレクタ装置1010へのシフト操作を行うことで、自動走行機能の選択及び起動を行うことができる。
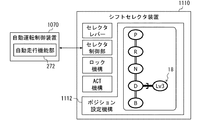
図17に示す本開示の第十一実施形態は、第十実施形態の変形例である。第十一実施形態において、自動運転制御装置1070の自動走行機能部272は、自動化レベル3に相当する自動走行を実現する。以上の自動運転制御装置1070の機能に対応し、シフトセレクタ装置1110のポジション設定機構1112には、Lv3レンジのみが起動ポジション18として設けられている。運転者は、Lv3レンジへのシフト操作により、レベル3機能の起動を行うことができる。
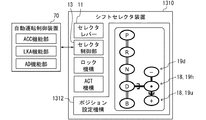
図19に示す本開示の第十三実施形態は、第三実施形態の変形例である。第十三実施形態のシフトセレクタ装置1310において、セレクタ制御部13は、Dレンジからホームポジション19hへのセレクタレバー11の移動を検出すると、ACC機能の起動を指示する起動指示信号を、自動運転制御装置70へ向けて出力する。このような第十三実施形態では、上位切替ポジション19uに加えてホームポジション19hも起動ポジション18として機能する。
以上、本開示の複数の実施形態について説明したが、本開示は、上記実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
Claims (9)
- 運転者に代わって車両を自動走行させる自動走行システム(60)を備える車両に適用され、シフトポジション(17)を選択する選択操作が入力されるシフトセレクタ装置であって、
前記選択操作が入力される入力部材(11)と、
前記入力部材を変位可能に支持しつつ前記入力部材の可動範囲を規定しており、複数の前記シフトポジションと前記自動走行システムに関連付けられた少なくとも一つの起動ポジション(18)とが前記可動範囲に設けられているポジション設定機構(12,212,312,412,512,612,712,812,912,1012,1112,1212,1312)と、
前記入力部材の変位によって前記起動ポジションが選択された場合に、この起動ポジションに関連付けられた前記自動走行システムの制御機能の起動指示を出力する起動制御部(13)と、
を備えるシフトセレクタ装置。 - 前記自動走行システムは、複数の前記制御機能を起動可能であり、
前記ポジション設定機構には、複数の前記制御機能がそれぞれ関連付けられた複数の前記起動ポジションが設けられている請求項1に記載のシフトセレクタ装置。 - 複数の前記制御機能には、上位制御機能及び下位制御機能が含まれており、
前記上位制御機能は、前記下位制御機能よりも制御対象となる運転操作の種類が多いか、又は走行中に前記運転者に課せられる役割が少ない請求項2に記載のシフトセレクタ装置。 - 前記ポジション設定機構には、
起動状態にする前記制御機能を、前記下位制御機能から前記上位制御機能へ向けて遷移させる上位切替ポジション(19u)と、
起動状態にする前記制御機能を、前記上位制御機能から前記下位制御機能へ向けて遷移させる下位切替ポジション(19d)と、が設けられている請求項3に記載のシフトセレクタ装置。 - 前記ポジション設定機構は、複数の前記起動ポジションが並ぶ起動ライン(28)と、複数の前記シフトポジションが並ぶシフトライン(27)と、を規定し、
前記起動ラインは、複数の前記シフトポジションの一つであるドライブレンジにて、前記シフトラインから分岐されており、
前記上位制御機能と関連付けられた前記起動ポジションは、前記下位制御機能と関連付けられた前記起動ポジションよりも、前記起動ラインにて前記ドライブレンジから遠い位置に設けられている請求項3に記載のシフトセレクタ装置。 - 前記自動走行システムにて利用できない前記制御機能がある場合に、この制御機能に関連付けられた前記起動ポジションへの前記入力部材の変位を規制する規制部(14)、をさらに備える請求項1〜5のいずれか一項に記載のシフトセレクタ装置。
- 前記自動走行システムにて起動中の前記制御機能が停止する場合又は停止予定の場合に、この制御機能に関連付けられた前記起動ポジションから、他の前記起動ポジション及び前記シフトポジションのいずれか一つに前記入力部材を移動させるアクチュエータ機構(15)、をさらに備える請求項1〜6のいずれか一項に記載のシフトセレクタ装置。
- 前記車両において前記入力部材とは異なる位置には、スイッチ装置(40)が設けられており、
前記自動走行システムは、前記スイッチ装置への操作の入力に基づき、前記起動ポジションの選択により起動した前記制御機能の作動を開始させる請求項1〜7のいずれか一項に記載のシフトセレクタ装置。 - 前記車両において前記入力部材とは異なる位置には、スイッチ装置(40)が設けられており、
前記自動走行システムは、
前記スイッチ装置への操作の入力に基づき、前記起動ポジションの選択により起動した前記制御機能の作動を開始させ、
選択中の前記起動ポジションに関連付けられた前記制御機能が利用できない場合には、前記スイッチ装置への操作の入力があっても、前記制御機能を作動させない請求項1〜6のいずれか一項に記載のシフトセレクタ装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016237836A JP6569651B2 (ja) | 2016-12-07 | 2016-12-07 | シフトセレクタ装置 |
| CN201780070211.4A CN109963736B (zh) | 2016-12-07 | 2017-11-10 | 换挡选择装置 |
| PCT/JP2017/040514 WO2018105309A1 (ja) | 2016-12-07 | 2017-11-10 | シフトセレクタ装置 |
| EP17878405.4A EP3552857A4 (en) | 2016-12-07 | 2017-11-10 | ROCKER DEVICE |
| US16/427,386 US11566704B2 (en) | 2016-12-07 | 2019-05-31 | Shift selector device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016237836A JP6569651B2 (ja) | 2016-12-07 | 2016-12-07 | シフトセレクタ装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018090220A true JP2018090220A (ja) | 2018-06-14 |
| JP2018090220A5 JP2018090220A5 (ja) | 2019-01-24 |
| JP6569651B2 JP6569651B2 (ja) | 2019-09-04 |
Family
ID=62491187
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016237836A Active JP6569651B2 (ja) | 2016-12-07 | 2016-12-07 | シフトセレクタ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11566704B2 (ja) |
| EP (1) | EP3552857A4 (ja) |
| JP (1) | JP6569651B2 (ja) |
| CN (1) | CN109963736B (ja) |
| WO (1) | WO2018105309A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020100246A (ja) * | 2018-12-21 | 2020-07-02 | マツダ株式会社 | 運転支援装置および該方法 |
| JP2022042372A (ja) * | 2020-09-02 | 2022-03-14 | 株式会社デンソー | 駆動装置 |
| JP2023157181A (ja) * | 2022-04-14 | 2023-10-26 | トヨタ自動車株式会社 | 車両制御インターフェース、車両、車両の制御方法 |
| JP2024025080A (ja) * | 2022-08-10 | 2024-02-26 | 株式会社東海理化電機製作所 | シフト装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6967055B2 (ja) * | 2019-11-21 | 2021-11-17 | 本田技研工業株式会社 | 車両制御装置、車両、車両制御装置の動作方法およびプログラム |
| JP7476856B2 (ja) * | 2021-08-23 | 2024-05-01 | トヨタ自動車株式会社 | 車両用表示制御装置、車両用表示装置、車両用表示制御方法およびプログラム |
| CN117184115A (zh) * | 2022-05-30 | 2023-12-08 | 腾讯科技(深圳)有限公司 | 一种驾驶状态的显示方法、相关装置、设备以及存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008201210A (ja) * | 2007-02-19 | 2008-09-04 | Honda Motor Co Ltd | 自動変速機操作装置 |
| WO2011090011A1 (ja) * | 2010-01-19 | 2011-07-28 | 本田技研工業株式会社 | シフト装置 |
| JP2011152826A (ja) * | 2010-01-26 | 2011-08-11 | Toyota Motor Corp | 変速段変更操作装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5734583B2 (ja) * | 2010-06-17 | 2015-06-17 | 株式会社東海理化電機製作所 | シフト装置 |
| DE102012002303B4 (de) * | 2012-02-06 | 2017-07-27 | Audi Ag | Fahrerassistenzsystem für einen Kraftwagen, Kraftwagen und Verfahren zum Betreiben eines Fahrerassistenzsystems |
| DE102012002305A1 (de) * | 2012-02-06 | 2013-08-22 | Audi Ag | Kraftwagen mit einer Fahrerassistenzeinrichtung und Verfahren zum Betreiben eines Kraftwagens |
| US20130220055A1 (en) * | 2012-02-28 | 2013-08-29 | Nissan North America, Inc. | Multifunctional integrated shifter |
| FR3005925B1 (fr) * | 2013-05-27 | 2015-05-01 | Renault Sa | Procede de fonctionnement d'un vehicule en mode manuel et en mode autonome |
| DE102013216365A1 (de) * | 2013-08-19 | 2015-03-12 | Volkswagen Aktiengesellschaft | Verfahren zum Bedienen eines Fahrerassistenzsystems eines Kraftfahrzeugs mit wenigstens einer Bedienvorrichtung |
| EP2902864B1 (en) * | 2014-01-30 | 2017-05-31 | Volvo Car Corporation | Control arrangement for autonomously driven vehicle |
| EP2930081B1 (en) | 2014-04-08 | 2019-03-27 | Volvo Car Corporation | Method for transition between driving modes |
| DE102014226014A1 (de) * | 2014-12-16 | 2016-06-16 | Volkswagen Aktiengesellschaft | Bedienvorrichtung und Verfahren zum Bedienen eines Parkassistenzsystems eines Kraftfahrzeugs |
| JP6451537B2 (ja) | 2015-07-21 | 2019-01-16 | 株式会社デンソー | 運転支援制御装置 |
| JP6497353B2 (ja) * | 2016-04-28 | 2019-04-10 | トヨタ自動車株式会社 | 自動運転制御装置 |
-
2016
- 2016-12-07 JP JP2016237836A patent/JP6569651B2/ja active Active
-
2017
- 2017-11-10 WO PCT/JP2017/040514 patent/WO2018105309A1/ja not_active Ceased
- 2017-11-10 CN CN201780070211.4A patent/CN109963736B/zh active Active
- 2017-11-10 EP EP17878405.4A patent/EP3552857A4/en not_active Withdrawn
-
2019
- 2019-05-31 US US16/427,386 patent/US11566704B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008201210A (ja) * | 2007-02-19 | 2008-09-04 | Honda Motor Co Ltd | 自動変速機操作装置 |
| WO2011090011A1 (ja) * | 2010-01-19 | 2011-07-28 | 本田技研工業株式会社 | シフト装置 |
| JP2011152826A (ja) * | 2010-01-26 | 2011-08-11 | Toyota Motor Corp | 変速段変更操作装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020100246A (ja) * | 2018-12-21 | 2020-07-02 | マツダ株式会社 | 運転支援装置および該方法 |
| JP7151461B2 (ja) | 2018-12-21 | 2022-10-12 | マツダ株式会社 | 運転支援装置および該方法 |
| JP2022042372A (ja) * | 2020-09-02 | 2022-03-14 | 株式会社デンソー | 駆動装置 |
| JP7452336B2 (ja) | 2020-09-02 | 2024-03-19 | 株式会社デンソー | 駆動装置および負荷駆動システム |
| JP2023157181A (ja) * | 2022-04-14 | 2023-10-26 | トヨタ自動車株式会社 | 車両制御インターフェース、車両、車両の制御方法 |
| JP7677213B2 (ja) | 2022-04-14 | 2025-05-15 | トヨタ自動車株式会社 | 車両制御インターフェース、車両、車両の制御方法 |
| US12330684B2 (en) | 2022-04-14 | 2025-06-17 | Toyota Jidosha Kabushiki Kaisha | Vehicle control interface, vehicle, and control method for vehicle |
| JP2024025080A (ja) * | 2022-08-10 | 2024-02-26 | 株式会社東海理化電機製作所 | シフト装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11566704B2 (en) | 2023-01-31 |
| CN109963736B (zh) | 2022-05-13 |
| EP3552857A4 (en) | 2019-11-13 |
| JP6569651B2 (ja) | 2019-09-04 |
| US20190285173A1 (en) | 2019-09-19 |
| CN109963736A (zh) | 2019-07-02 |
| EP3552857A1 (en) | 2019-10-16 |
| WO2018105309A1 (ja) | 2018-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6569651B2 (ja) | シフトセレクタ装置 | |
| EP2902864B1 (en) | Control arrangement for autonomously driven vehicle | |
| US9891622B2 (en) | Driving assistance device | |
| US9845866B2 (en) | Device and method for selectively operating a motor vehicle in a user-controlled or an automatic driving operation mode | |
| CN104245392B (zh) | 具有驾驶员辅助装置的汽车以及用于运行汽车的方法 | |
| CN105711596B (zh) | 用于控制机动车的方法及其设备 | |
| JP6828580B2 (ja) | 車両の制御装置 | |
| US11285954B2 (en) | Vehicle, and control apparatus and control method thereof | |
| KR102306474B1 (ko) | 자동 운전 차량 | |
| JP2014065478A (ja) | 自律走行車両の車両制御権転換方法 | |
| CN113195343B (zh) | 用于执行由系统支持的各种动作类型的自动化动作的、具有用户界面的泊车辅助系统 | |
| WO2016181725A1 (ja) | 自動運転制御装置 | |
| CN105473410B (zh) | 用于利用至少一个操作装置来操作机动车的驾驶员协助系统的方法 | |
| KR20170055318A (ko) | 주차지원장치 및 그의 차속 제어 방법 | |
| JP2019137360A (ja) | 操舵支援装置 | |
| JP7168341B2 (ja) | 車両遠隔操作支援システム | |
| WO2021044616A1 (ja) | 駐車支援方法及び駐車支援装置 | |
| CN113335301A (zh) | 用于自动车道跟随的驾驶员偏移请求 | |
| JP5790306B2 (ja) | 駐車支援装置及び駐車支援方法 | |
| JP6040766B2 (ja) | 駐車支援装置 | |
| CN105035093A (zh) | 至少部分自主驾驶系统中的驾驶员交互接口 | |
| JP7678407B2 (ja) | リモート駐車装置 | |
| JP7687174B2 (ja) | 車両の駐車支援装置およびプログラム | |
| KR102592091B1 (ko) | 가상 스티어링 구현 및 운영방법 | |
| JP2020111214A (ja) | 車線変更支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181207 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190722 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6569651 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |