JP2018090867A - 基板上に膜を形成する方法、及び、成膜システム - Google Patents
基板上に膜を形成する方法、及び、成膜システム Download PDFInfo
- Publication number
- JP2018090867A JP2018090867A JP2016236476A JP2016236476A JP2018090867A JP 2018090867 A JP2018090867 A JP 2018090867A JP 2016236476 A JP2016236476 A JP 2016236476A JP 2016236476 A JP2016236476 A JP 2016236476A JP 2018090867 A JP2018090867 A JP 2018090867A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- transfer
- processing chamber
- chamber
- film forming
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/04—Coating on selected surface areas, e.g. using masks
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/34—Sputtering
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/50—Substrate holders
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/56—Apparatus specially adapted for continuous coating; Arrangements for maintaining the vacuum, e.g. vacuum locks
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
Landscapes
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Engineering & Computer Science (AREA)
- Materials Engineering (AREA)
- Mechanical Engineering (AREA)
- Metallurgy (AREA)
- Organic Chemistry (AREA)
- Physical Vapour Deposition (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
【課題】成膜装置の処理チャンバ内において基板を直線的に移動させるための別途の機構を不要とする成膜システムの提供。【解決手段】成膜システムは、成膜装置及び搬送モジュールを備える。成膜装置は、処理チャンバを提供するチャンバ本体と、処理チャンバ内に設けられたターゲットを保持するホルダと、を有する。搬送モジュールは、処理チャンバに接続可能な搬送チャンバを提供する別のチャンバ本体と、基板を搬送するための搬送装置と、を有する。方法は、搬送装置によって搬送チャンバから処理チャンバに基板を搬送する工程ST1と、搬送装置が処理チャンバ内において基板を支持し、且つ、基板を直線的に移動させている状態で、基板上に膜を形成するためにターゲットから粒子を放出させる工程ST3と、を含む成膜システム。【選択図】図1
Description
本開示の実施形態は、基板上に膜を形成する方法、及び、成膜システムに関するものである。
半導体デバイスといった電子デバイスの製造においては、基板上に膜を形成する成膜処理が行われる。成膜処理に用いられる成膜装置としては、例えば、特許文献1に記載された成膜装置が知られている。
特許文献1に記載された成膜装置は、真空容器、ステージ、及び、ターゲットを有している。ステージは、回転可能に構成されており、真空容器内に設けられている。ステージ上には基板が搭載される。ターゲットは、ステージの上方に設けられている。この成膜装置では、ステージが回転されつつ、ターゲットから粒子が放出される。これにより、基板上に膜が形成される。
特許文献1に記載の成膜装置とは異なり、処理チャンバ内で基板を直線的に移動させつつ当該基板上に膜を形成することが考えられる。このような基板の直線的な移動のためには、通常、処理チャンバ内において基板を直線的に移動させるための別途の機構が必要となる。しかしながら、このような機構の追加は装置のコストの増加をもたらす。
一態様においては、成膜システムにおいて基板上に膜を形成する方法が提供される。成膜システムは、成膜装置及び搬送モジュールを備える。成膜装置は、処理チャンバを提供するチャンバ本体と、処理チャンバ内に設けられたターゲットを保持するホルダと、を有する。搬送モジュールは、処理チャンバに接続可能な搬送チャンバを提供する別のチャンバ本体と、基板を搬送するための搬送装置であり、搬送チャンバ内に設けられた該搬送装置と、を有する。一態様に係る方法は、搬送モジュールの搬送装置によって搬送チャンバから処理チャンバに基板を搬送する工程と、搬送モジュールの搬送装置が処理チャンバ内において基板を直線的に移動させている状態で、基板上に膜を形成するためにターゲットから粒子を放出させる工程と、を含む。
一態様に係る方法では、通常の成膜システムに備えられている搬送モジュールの搬送装置によって、処理チャンバ内での基板の直線的な移動が実現される。したがって、処理チャンバ内において基板を直線的に移動させるための別途の機構が不要となる。
一実施形態において、方法は、搬送チャンバから処理チャンバに基板が搬送された後、ターゲットから粒子を放出させる前に、基板を部分的に覆うマスクを搬送装置上に搭載する工程を更に含む。この実施形態の方法では、ターゲットから粒子を放出させている間、マスクから露出されている基板内の領域に膜が形成される。
別の態様においては成膜システムが提供される。成膜システムは、成膜装置、搬送モジュール、及び、制御部を備える。搬送モジュールは、基板の搬送を行うように構成されたモジュールである。制御部は、成膜装置及び搬送モジュールを制御するよう構成されている。成膜装置は、処理チャンバを提供するチャンバ本体と、処理チャンバ内に設けられたターゲットを保持するホルダと、ターゲットから粒子を放出させるためにホルダに電圧を印加するように構成された電源と、を有する。搬送モジュールは、処理チャンバに接続可能な搬送チャンバを提供する別のチャンバ本体と、基板を搬送するための搬送装置であり、搬送チャンバ内に設けられた該搬送装置と、を有する。制御部は、搬送チャンバから処理チャンバに基板を搬送するよう搬送装置を制御する。次いで、制御部は、処理チャンバ内で搬送装置上に搭載された基板を直線的に移動させるよう搬送装置を制御する。制御部は、搬送装置が処理チャンバ内で基板を直線的に移動させている状態で、ターゲットから粒子を放出させるためにホルダに電圧を印加するよう、搬送装置及び電源を制御する。この成膜システムによれば、処理チャンバ内において基板を直線的に移動させるための別途の機構が不要となる。
一実施形態において、成膜装置は、基板を部分的に露出させるためのマスクを上下動可能に支持するリフト機構を更に備える。制御部は、基板を処理チャンバに搬入した後に、リフト機構によって支持されたマスクの下方のエリアに基板を配置するよう搬送装置を制御する。制御部は、ターゲットから粒子を放出させる前に、基板の上面をマスクによって部分的に覆うためにリフト機構から搬送装置にマスクを受け渡すようリフト機構を制御する。
一実施形態において、成膜装置は、処理チャンバ内に設けられたスリット板を更に有する。スリット板には、その板厚方向に貫通するスリットが形成されている。ホルダは、スリット板の上方に配置されたターゲットを保持する。制御部は、ターゲットから粒子が放出されているときに、基板がスリットの下方のエリアを直線的に通過するよう搬送装置を制御する。
以上説明したように、成膜装置の処理チャンバ内において基板を直線的に移動させるための別途の機構が不要となる。
以下、図面を参照して種々の実施形態について詳細に説明する。なお、各図面において同一又は相当の部分に対しては同一の符号を附すこととする。
図1は、一実施形態に係る、基板上に膜を形成する方法を示す流れ図である。図1に示す方法MTは、スパッタによって基板上に膜を形成する方法である。この方法MTでは、成膜装置と搬送モジュールを備える成膜システムが利用される。
図2は、一実施形態に係る成膜システムを概略的に示す図である。図2に示す成膜システム100は、搬送モジュール108、及び、成膜装置を含む一以上の処理モジュールを備えている。図2に示す例では、成膜システム100は、一以上の処理モジュールとして、複数の処理モジュール110a〜110hを備えている。複数の処理モジュール110a〜110hのうち少なくとも一つの処理モジュールは、成膜装置である。複数の処理モジュール110a〜110hのうち他の処理モジュールは、成膜装置であってもよく、或いは、他の基板処理装置であってもよい。他の基板処理装置は、プラズマエッチング装置、加熱処理装置といった任意の基板処理装置であり得る。一実施形態において、成膜システム100は、ローダモジュール102、ロードロックモジュール104,106、及び、制御部112を更に備え得る。
ローダモジュール102は、大気圧環境下において基板を搬送する装置である。ローダモジュール102には、複数の台114が取り付けられている。複数の台114の各々の上には、複数の基板を収容可能な容器116がそれぞれ搭載される。容器116の各々は、例えばFOUP(Front−Opening Unified Pod)であり得る。
ローダモジュール102は、チャンバ102cを提供している。チャンバ102c内には搬送装置102tが設けられている。搬送装置102tは、基板を保持して当該基板を搬送するためのロボットアームを含み得る。このローダモジュール102には、ロードロックモジュール104及びロードロックモジュール106が接続されている。搬送装置102tは、容器116とロードロックモジュール104との間、又は、容器116とロードロックモジュール106との間において基板を搬送する。
ロードロックモジュール104及びロードロックモジュール106はそれぞれ、予備減圧のためのチャンバ104c及びチャンバ106cを提供している。ロードロックモジュール104及びロードロックモジュール106には、搬送モジュール108が接続されている。搬送モジュール108は、チャンバ本体108m、及び、搬送装置108tを有している。チャンバ本体108mは、その内部空間を、減圧可能な搬送チャンバ108cとして提供している。
搬送チャンバ108c内には、搬送装置108tが設けられている。搬送装置108tは、基板を搬送する装置である。搬送装置108tは、一実施形態では、多関節アーム108a、支持部108s、及び、駆動装置108dを有している。多関節アーム108aの一端は駆動装置108dに接続されている。駆動装置108dは、多関節アーム108aの他端を移動させる駆動力を発生する。多関節アーム108aの他端には、支持部108sが結合されている。支持部108sは、その上に搭載した基板を支持するよう構成されている。支持部108sは、所謂ピック、又は、エンドエフェクタである。
搬送モジュール108には、複数の処理モジュール110a〜110hが接続されている。搬送モジュール108の搬送装置108tは、ロードロックモジュール104及びロードロックモジュール106の何れかと複数の処理モジュール110a〜110hの何れかとの間、及び、複数の処理モジュール110a〜110hのうち任意の二つの処理モジュール間で、基板を搬送する。また、搬送モジュール108の搬送装置108tは、後述する成膜装置の処理チャンバ内において、基板を直線的に移動させるように構成されている。
制御部112は、ローダモジュール102、搬送モジュール108、及び、複数の処理モジュール110a〜110hを制御するよう構成されている。制御部112は、例えば、プロセッサ、メモリといった記憶装置、制御信号の出力インタフェイス等を有するコンピュータ装置であり得る。記憶装置には、成膜システム100の各部を制御するためのプログラム及び成膜システム100において方法MTを実施するためのレシピデータが記憶されている。プロセッサは、記憶装置に記憶されているプログラム及びレシピデータに従って動作し、成膜システム100の各部を制御するための制御信号を当該各部に出力する。
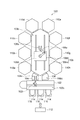
以下、図3を参照して成膜システム100の処理モジュールとして採用される一実施形態の成膜装置について説明する。図3は、一実施形態に係る成膜装置を概略的に示す図である。図3では、一実施形態に係る成膜装置が、部分的に破断されて示されている。また、図3には、一実施形態に係る成膜装置と共に、搬送モジュール108の一部が示されている。図3に示す成膜装置10は、チャンバ本体12、ホルダ14、及び、電源16を備えている。成膜装置10は、スリット板18、及び、リフト機構20を更に備えていてもよい。
チャンバ本体12は、その内部空間を処理チャンバ12cとして提供している。一実施形態において、チャンバ本体12は、本体12a及び蓋体12bを有している。本体12aは、略円筒形状を有し得る。本体12aの上端は開口されている。蓋体12bは、本体12aの上端の開口を閉じるように、本体12aの上端の上に設けられている。
チャンバ本体12の底部には、排気口12eが形成されている。排気口12eには、排気装置22が接続されている。排気装置22は、圧力制御装置、及び、ターボ分子ポンプ、ドライポンプといった減圧ポンプを含み得る。チャンバ本体12には、処理チャンバ12cにガスを導入するためのポート12iが設けられている。処理チャンバ12cには、ガス供給部からのガス、例えば、不活性ガスがポート12iを介して導入される。
チャンバ本体12の側壁には、開口12pが形成されている。開口12pは、処理チャンバ12c内への基板Wの搬入、及び、処理チャンバ12cからの基板Wの搬出のために設けられている。開口12pは、ゲートバルブ12gによって開閉可能になっている。このゲートバルブ12gは、処理チャンバ12cと搬送チャンバ108cとの間に介在している。搬送チャンバ108cは、ゲートバルブ12gが開かれているときには処理チャンバ12cと連通する。即ち、搬送チャンバ108cは処理チャンバ12cに接続可能となっている。
処理チャンバ12c内には、スリット板18が設けられている。スリット板18は、略板状の部材である。スリット板18は、処理チャンバ12cの高さ方向の中間において水平に延在している。スリット板18の縁部はチャンバ本体12に固定されている。スリット板18は、処理チャンバ12cを第1空間S1と第2空間S2に区画している。第1空間S1は、処理チャンバ12cの一部の空間であり、スリット板18の上方にある。第2空間S2は、処理チャンバ12cの別の一部の空間であり、スリット板18の下方にある。
スリット板18には、スリット18sが形成されている。スリット18sは、スリット板18をその板厚方向(図中では、Z方向)に貫通している。成膜装置10における成膜時には、基板Wは、スリット18sの下方をX方向に直線的に移動する。X方向は、水平な一方向である。スリット18sは、水平な別の一方向、即ちY方向に沿って長く延びており、例えば、略矩形の平面形状を有している。Y方向は、スリット18sの長手方向であり、X方向に直交する方向である。スリット18sのY方向における中心は、成膜時における基板WのY方向における中心と略一致している。Y方向におけるスリット18sの幅は、成膜時における基板WのY方向の幅(最大幅)よりも長い。一方、X方向におけるスリット18sの幅は、成膜時における基板WのX方向の幅(最大幅)よりも短い。
ホルダ14は、スリット板18の上方に設けられている。ホルダ14は、導電性を有する材料から形成されている。ホルダ14は、絶縁性の部材を介してチャンバ本体12に取り付けられている。一実施形態では、ホルダ14は、絶縁性の部材を介して蓋体12bに取り付けられている。
ホルダ14は、第1空間S1内に配置されたターゲット24を保持するよう構成されている。ホルダ14は、一実施形態では、スリット18sに対して斜め上方にターゲット24が位置するように、当該ターゲット24を保持する。ターゲット24は、例えば略矩形の平面形状を有する。一実施形態において、ターゲット24のY方向における幅は、成膜時における基板WのY方向の幅(最大幅)よりも大きい。
ホルダ14には、電源16が電気的に接続されている。電源16は、ターゲット24が金属材料である場合には、直流電源であり得る。電源16は、ターゲット24が誘電体又は絶縁体である場合には、高周波電源であり、整合器を介してホルダ14に電気的に接続される。
一実施形態において、成膜装置10は、ステージ30、駆動軸34、及び、駆動装置36を更に備え得る。ステージ30は、第2空間S2内に設けられている。ステージ30は、その上に基板を搭載することが可能であるように構成されている。ステージ30は、駆動軸34を介して駆動装置36に接続されている。駆動軸34は、その上端においてステージ30に結合されている。駆動軸34は、ステージ30に結合された上端から下方に延びて、チャンバ本体12の外側で駆動装置36に接続されている。駆動装置36は、駆動軸34を介して、ステージ30を上下動させ、及び/又は、回転させる。駆動装置36は、ステージ30の上下動及び/又は回転のための駆動力を発生する。駆動装置36は、例えばモータである。このステージ30は、基板Wを回転させつつ当該基板W上に膜を形成するときに用いることができる。
リフト機構20は、マスクMKを上下動可能に支持するよう構成されている。マスクMKは、基板Wに対する成膜時に当該基板Wを部分的に覆う。例えば、基板Wが円盤形状である場合には、マスクMKは、平面視において矩形形状を有し、当該マスクMKを貫通する円形の開口を有する。この場合に、マスクMKは、基板Wのエッジを覆い、開口から基板Wのエッジの内側の領域を露出させる。一実施形態において、マスクMKは、基板Wの一部に加え、搬送装置108tの支持部108s及び多関節アーム108aの一部を覆うように構成されている。
リフト機構20は、複数のリフトピン40、支持体42、駆動軸44、及び、駆動装置46を有している。複数のリフトピン40は、鉛直方向(Z方向)に延在している。複数のリフトピン40は、それらの上端においてマスクMKを支持する。複数のリフトピン40は、その下端側において支持体42によって支持されている。支持体42は、平面視において略馬蹄形をなしている。支持体42は、駆動軸34を囲むように設けられている。支持体42は、駆動軸44を介して駆動装置46に接続されている。駆動軸44は、その上端において支持体42に結合されている。駆動軸44は、支持体42に結合された上端から下方に延在して、チャンバ本体12の外側で駆動装置46に接続されている。駆動装置46は、駆動軸44及び支持体42を介して、複数のリフトピン40を上下動させる。駆動装置46は、複数のリフトピン40の上下動のための駆動力を発生する。なお、複数のリフトピン40がステージ30から上方に突き出してマスクMKを支持できるように、ステージ30には、当該複数のリフトピン40が挿入される複数の貫通孔が形成されている。
このリフト機構20は、その上下動により、当該リフト機構20と搬送装置108tの支持部108sとの間で、マスクMKを受け渡すようになっている。支持部108sは、マスクMKを、当該支持部108s上で支持するために、複数の支持ピン108pを有している。複数の支持ピン108pはそれらの上端においてマスクMKを支持する。複数の支持ピン108pの上端は、高さ方向におけるレベルとして、支持部108sに搭載された基板Wの上面のレベルと同一のレベルを有するか、或いは、基板Wの上面のレベルよりも高いレベルを有する。
成膜装置10と搬送モジュール108を有する成膜システム100では、基板W上に膜を形成する際に、搬送モジュール108の搬送装置108tにより、処理チャンバ12c内で基板Wを直線的に移動させることができる。以下、図1と共に、図3〜図6を参照して、方法MTについて説明し、また、方法MTの実行における成膜システム100の動作について説明する。図4は、一実施形態に係る成膜システムを概略的に示す図であり、基板が処理チャンバに搬入された状態を示す図である。図5は、一実施形態に係る成膜システムを概略的に示す図であり、基板がマスクの下方に配置された状態を示す図である。図6は、一実施形態に係る成膜システムを概略的に示す図であり、基板を部分的に覆うようにマスクが搬送装置に受け渡された状態を示す図である。
方法MTの工程ST1の実行の前には、容器116から取り出された基板Wが、ローダモジュール102、並びに、ロードロックモジュール104及び106のうち一方を介して、搬送モジュール108の搬送チャンバ108c内に収容される。搬送チャンバ108c内では、基板Wは、搬送装置108tの支持部108s上に搭載され、当該支持部108sによって支持される。
次いで、搬送チャンバ108cと処理チャンバ12cとを連通させるために、ゲートバルブ12gが開かれる。ゲートバルブ12gは、制御部112による当該ゲートバルブ12gの制御によって開かれる。
次いで、マスクMKが第2空間S2内で上方に退避される。マスクMKが上方に退避している状態については、図4を参照されたい。マスクMKの上方への退避においては、リフト機構20の駆動装置46が制御部112によって制御される。これにより、後述する工程ST2において、マスクMKが基板W及び支持部108sに干渉しないように、基板WをマスクMKの下方のエリアに移動させることが可能となる。なお、マスクMKの上方への退避は、後述する工程ST2の実行前であれば任意のタイミングで行われ得る。
次いで、方法MTの工程ST1において、支持部108s上に搭載された基板Wが、図4に示すように、搬送装置108tによって搬送チャンバ108cから開口12pを介して処理チャンバ12c内に搬送される。この工程ST1において、搬送装置108tは、搬送チャンバ108cから処理チャンバ12c内に基板Wを搬送するよう、制御部112によって制御される。
続く方法MTの工程ST2では、基板Wを部分的に覆うようにマスクMKが搬送装置108tの支持部108s上に搭載される。工程ST2では、まず、図5に示すように基板WをマスクMKの下方のエリアに配置するよう、搬送装置108tが制御部112によって制御される。工程ST2では、次いで、リフト機構20の複数のリフトピン40から搬送装置108tの支持部108sにマスクMKを受け渡すために、リフト機構20の駆動装置46が制御部112によって制御される。制御部112による駆動装置46の制御によって、複数のリフトピン40が下方に移動し、図6に示すように、マスクMKが複数のリフトピン40の上端から搬送装置108tの支持部108sに受け渡される。支持部108s上では、マスクMKは複数の支持ピン108p上に搭載される。なお、図6に示すように、工程ST2において、複数のリフトピン40は、それらの上端がステージ30よりも下方に位置するように、下方へ移動される。
続く方法MTの工程ST3では、基板Wに対する成膜が行われる。方法MTでは、工程ST3の実行時を含む期間において、ポート12iから不活性ガス(例えば、窒素ガス又は希ガス)が処理チャンバ12cに供給される。また、排気装置22によって処理チャンバ12cの圧力が指定された圧力に設定される。
工程ST3では、図6に示すようにその上に配置されたマスクMKによって部分的に覆われた基板Wが、搬送装置108tによって処理チャンバ12cの第2空間S2内でX方向に沿って直線的に移動される。この移動により、基板Wは、スリット18sの下方のエリアを直線的に通過する。工程ST3における基板Wの移動のために、搬送装置108tは制御部112によって制御される。また、工程ST3では、基板Wが直線的に移動されている状態で、電源16からホルダ14に電圧が印加される。ホルダ14に対する電圧の印加のために、電源16は制御部112によって制御される。
工程ST3では、ホルダ14に対して電圧が印加されるので、ターゲット24の周囲でガスが解離して、イオンがターゲット24に引き付けられる。イオンがターゲット24に衝突すると、ターゲット24からその構成材料の粒子が放出される。また、工程ST3では、基板WがX方向に沿って直線的に移動されてスリット18sの下方を通過するので、ターゲット24から放出されてスリット18sを通過した粒子が基板W上に堆積する。これにより、基板Wに膜が形成される。この膜は、マスクMKから露出されている基板Wの領域に形成される。
以上説明したように、基板Wに対する成膜の際には、成膜システム100に備えられている搬送モジュール108の搬送装置108tによって、処理チャンバ12c内での基板Wの直線的な移動が実現される。したがって、処理チャンバ12c内において基板Wを直線的に移動させるための別途の機構が不要となる。
一実施形態では、マスクMKを支持部108s上に搭載した状態で、基板Wに対する成膜が行われる。したがって、基板Wのエッジ及び当該基板Wの裏側に、ターゲット24からの粒子が付着することが抑制される。また、マスクMKが搬送装置108tの支持部108s及び多関節アーム108aの一部を覆うので、支持部108s及び多関節アーム108aの一部にターゲット24からの粒子が付着することが抑制される。
なお、マスクMKが処理チャンバ12c内に存在する状態を前提として実施形態の説明を行ってきたが、ステージ30の上下動を利用して、搬送装置108tの支持部108sからステージ30上にマスクMKを受け渡し、しかる後に、方法MTを実行することも可能である。この例では、支持部108sからマスクMKを受け取るための複数のピンがステージ30に設けられる。支持部108s上に搭載されたマスクMKは、搬送チャンバ108cから処理チャンバ12c内に搬送され、当該支持部108sからステージ30の複数のピン上に受け渡される。そして、支持部108sが処理チャンバ12cから搬送チャンバ108cに移動される。しかる後に、方法MTが実行される。なお、この例では、成膜装置10は、リフト機構20を備えていなくてもよい。
また、複数のリフトピン40の上下動を利用して、搬送装置108tの支持部108sからステージ30上にマスクMKを受け渡し、その後、方法MTを実行することも可能である。具体的には、方法MTの実行前に、複数のリフトピン40が、それらの上端がステージ30よりも下方に位置するように下方に配置される。次いで、支持部108s上に搭載されたマスクMKが、搬送チャンバ108cから処理チャンバ12c内に搬送される。次いで、複数のリフトピン40が上昇され、支持部108sから複数のリフトピン40の上端の上にマスクMKが受け渡される。次いで、支持部108sが処理チャンバ12cから搬送チャンバ108cに移動される。そして、複数のリフトピン40が下方に移動されて、複数のリフトピン40からステージ30上にマスクMKが受け渡される。しかる後に、方法MTが実行される。
10…成膜装置、12…チャンバ本体、12c…処理チャンバ、14…ホルダ、16…電源、18…スリット板、18s…スリット、20…リフト機構、40…リフトピン、24…ターゲット、30…ステージ、100…成膜システム、108…搬送モジュール、108m…チャンバ本体、108c…搬送チャンバ、108t…搬送装置、108a…多関節アーム、108s…支持部、110a〜110h…処理モジュール、112…制御部、MK…マスク。
Claims (5)
- 成膜装置及び搬送モジュールを備える成膜システムにおいて基板上に膜を形成する方法であって、
前記成膜装置は、
処理チャンバを提供するチャンバ本体と、
前記処理チャンバ内に設けられたターゲットを保持するホルダと、
を有し、
前記搬送モジュールは、
前記処理チャンバに接続可能な搬送チャンバを提供する別のチャンバ本体と、
基板を搬送するための搬送装置であり、前記搬送チャンバ内に設けられた該搬送装置と、
を有し、
前記搬送装置によって前記搬送チャンバから前記処理チャンバに基板を搬送する工程と、
前記搬送装置が前記処理チャンバ内で前記基板を直線的に移動させている状態で、前記基板上に膜を形成するために前記ターゲットから粒子を放出させる工程と、
を含む方法。 - 基板を搬送する前記工程と粒子を放出させる前記工程との間において、前記基板を部分的に覆うマスクを前記搬送装置上に搭載する工程を更に含み、
粒子を放出させる前記工程では、前記マスクから露出されている前記基板内の領域に膜が形成される、
請求項1に記載の方法。 - 成膜装置と、
基板の搬送を行うように構成された搬送モジュールと、
前記成膜装置及び前記搬送モジュールを制御する制御部と、
を備え、
前記成膜装置は、
処理チャンバを提供するチャンバ本体と、
前記処理チャンバ内に設けられたターゲットを保持するホルダと、
前記ターゲットから粒子を放出させるために前記ホルダに電圧を印加するように構成された電源と、
を有し、
前記搬送モジュールは、
前記処理チャンバに接続可能な搬送チャンバを提供する別のチャンバ本体と、
基板を搬送するための搬送装置であり、前記搬送チャンバ内に設けられた該搬送装置と、
を有し、
前記制御部は、
前記搬送チャンバから前記処理チャンバに基板を搬送するよう前記搬送装置を制御し、
前記搬送装置が前記処理チャンバ内で前記基板を直線的に移動させている状態で、前記ターゲットから粒子を放出させるために前記ホルダに電圧を印加するよう、前記搬送装置及び前記電源を制御する、
成膜システム。 - 前記成膜装置は、前記基板の上面を部分的に露出させるためのマスクを上下動可能に支持するリフト機構を更に有し、
前記制御部は、
前記基板を前記処理チャンバに搬入した後に、前記リフト機構によって支持された前記マスクの下方のエリアに前記基板を配置するよう前記搬送装置を制御し、
前記ターゲットから粒子を放出させる前に、前記基板の上面を前記マスクによって部分的に覆うために前記リフト機構から前記搬送装置に前記マスクを受け渡すよう前記リフト機構を制御する、
請求項3に記載の成膜システム。 - 成膜装置は、前記処理チャンバ内に設けられたスリット板を更に有し、該スリット板には、その板厚方向に貫通するスリットが形成されており、
前記ホルダは、前記スリット板の上方に配置された前記ターゲットを保持し、
前記ターゲットから粒子が放出されているときに、前記制御部は、前記基板が前記スリットの下方のエリアを直線的に通過するよう前記搬送装置を制御する、
請求項3又は4に記載の成膜システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016236476A JP2018090867A (ja) | 2016-12-06 | 2016-12-06 | 基板上に膜を形成する方法、及び、成膜システム |
| PCT/JP2017/042442 WO2018105427A1 (ja) | 2016-12-06 | 2017-11-27 | 基板上に膜を形成する方法、及び、成膜システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016236476A JP2018090867A (ja) | 2016-12-06 | 2016-12-06 | 基板上に膜を形成する方法、及び、成膜システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018090867A true JP2018090867A (ja) | 2018-06-14 |
Family
ID=62491984
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016236476A Pending JP2018090867A (ja) | 2016-12-06 | 2016-12-06 | 基板上に膜を形成する方法、及び、成膜システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2018090867A (ja) |
| WO (1) | WO2018105427A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2021095295A1 (ja) * | 2019-11-11 | 2021-05-20 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5521553A (en) * | 1978-08-01 | 1980-02-15 | Anelva Corp | Device for fabricating film |
| JPH0734221A (ja) * | 1993-07-20 | 1995-02-03 | Shin Etsu Chem Co Ltd | 薄膜形成方法 |
| JP2010024469A (ja) * | 2008-07-15 | 2010-02-04 | Japan Steel Works Ltd:The | スパッタ装置 |
-
2016
- 2016-12-06 JP JP2016236476A patent/JP2018090867A/ja active Pending
-
2017
- 2017-11-27 WO PCT/JP2017/042442 patent/WO2018105427A1/ja not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2021095295A1 (ja) * | 2019-11-11 | 2021-05-20 | ||
| JP7108347B2 (ja) | 2019-11-11 | 2022-07-28 | 株式会社シンクロン | 成膜装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018105427A1 (ja) | 2018-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4912253B2 (ja) | 基板搬送装置、基板処理装置及び基板搬送方法 | |
| JP5212165B2 (ja) | 基板処理装置 | |
| US7059817B2 (en) | Wafer handling apparatus and method | |
| US20090252582A1 (en) | Processing thin wafers | |
| KR102297165B1 (ko) | 성막 시스템 및 기판 상에 막을 형성하는 방법 | |
| JP2009062604A (ja) | 真空処理システムおよび基板搬送方法 | |
| JP2001250855A (ja) | ウエハハンドリングシステム及びそのためのウエハ移送方法 | |
| JP2011151263A (ja) | エッチング方法、エッチング装置及びリング部材 | |
| US12176215B2 (en) | Substrate processing apparatus, substrate processing method, and non-transitory computer-readable storage medium | |
| KR20110040771A (ko) | 공작물 전달 시스템 및 방법 | |
| JP2001250856A (ja) | ウエハ処理装置及びこれにアクセスする方法 | |
| US20220230904A1 (en) | Substrate processing system and method for controlling substrate processing system | |
| JP2020026575A (ja) | 成膜装置、成膜システム、および成膜方法 | |
| JP5610009B2 (ja) | 基板処理装置 | |
| US11538705B2 (en) | Plasma processing system and operating method of the same | |
| JP3695971B2 (ja) | 成膜装置および成膜方法 | |
| KR100553685B1 (ko) | 반도체 기판을 컨테이너로부터 언로딩하는 이송장치 및이송방법 | |
| US8545158B2 (en) | Loading unit and processing system | |
| JP5975128B2 (ja) | 基板処理装置、基板処理方法 | |
| JP2018090867A (ja) | 基板上に膜を形成する方法、及び、成膜システム | |
| JP5654807B2 (ja) | 基板搬送方法及び記憶媒体 | |
| KR20160057357A (ko) | 건식 및 습식 처리를 위한 단일 플랫폼의 기판처리설비 | |
| US20250046585A1 (en) | Substrate processing system and transfer method | |
| KR101612516B1 (ko) | 건식 및 습식 처리를 위한 단일 플랫폼의 기판처리설비 | |
| US20220081757A1 (en) | Film forming apparatus, film forming system, and film forming method |