JP2018091777A - エンコーダおよびその調整方法 - Google Patents
エンコーダおよびその調整方法 Download PDFInfo
- Publication number
- JP2018091777A JP2018091777A JP2016236533A JP2016236533A JP2018091777A JP 2018091777 A JP2018091777 A JP 2018091777A JP 2016236533 A JP2016236533 A JP 2016236533A JP 2016236533 A JP2016236533 A JP 2016236533A JP 2018091777 A JP2018091777 A JP 2018091777A
- Authority
- JP
- Japan
- Prior art keywords
- scale
- signal
- head
- measurement
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Optical Transform (AREA)
Abstract
Description
このようなエンコーダにおいて、スケールおよびヘッドは分離しており、スケールおよびヘッドは、互いに所定の位置関係を保つように姿勢を調整したうえで測定対象物に組み付けられる。一般的には、使用者は、オシロスコープ等の外部機器を見ながらスケールに対するヘッドの姿勢を手動で調整する(例えば、特許文献1参照)。
以下、光電式エンコーダにおけるスケールに対するヘッドの姿勢の調整方法について、図7を参照して説明する。
図7(A)は、横軸をヘッドのヨー角度θ、縦軸をリサージュ信号の信号強度Rとして、ヘッドのヨー角度θの変化に対応するリサージュ信号の信号強度Rの変化を示すグラフであり、図7(B)は、横軸をヘッドのヨー角度θ、縦軸を光源(送信手段)の電流Iとして、ヘッドのヨー角度θの変化に対応する光源の電流Iの変化を示す図である。
具体的には、図8は、リサージュ信号A相,B相の信号強度について、横軸をリサージュ信号A相、縦軸をリサージュ信号B相として、リサージュ信号の信号強度Rを示すグラフである。
図8に示すように、使用者がヘッドをヨー角度方向に動かすと、リサージュ信号の信号強度Rの直径は変動する。使用者は、ヘッドをヨー角度方向に動かし、リサージュ信号の信号強度Rの直径がオシロスコープに表示できる最大の直径になるようにスケールに対するヘッドの姿勢を調整する。
リサージュ信号の信号強度Rの直径を最大にすることで、受光手段(受信手段)が受光(受信)する測定光の光量(測定信号の大きさ)が大きくなり、測定の効率が向上するためである。
また、従来、スケールに対するヘッドの姿勢を外部機器を見ながら調整する際、送信手段(光源)の電流を一定にしてヘッドの姿勢を調整していた。ここで、光源は個々の特性にバラつきがあることが知られている。光源に流れる電流の大きさは光源から照射(送信)される測定光の光量(測定信号の大きさ)に相当する。
したがって、ヘッドの姿勢を調整する際、その光源に最適な電流条件で電流を流すことが好ましいが、ある光源に最適な電流条件であっても、他の光源には最適な電流条件であるとは限らないため、スケールに対するヘッドの調整をする前に光源に最適な電流条件を見つけなければならないという問題がある。
しかしながら、本発明によれば、信号線が2本必要なリサージュ信号の信号強度ではなく測定信号の大きさを観測する。したがって、スケールに対するヘッドの姿勢を調整するための測定信号の大きさを1本の信号線で観測することができ、エンコーダの小型化やコスト削減を図ることができる。
しかしながら、このような構成によれば、エンコーダは、スケールに対するヘッドの姿勢を変更する姿勢変更手段を備え、姿勢変更手段は姿勢調整部からの指令に基づいて自動でヘッドの姿勢を変更するため、使用者が手動でスケールに対するヘッドの姿勢を調整する必要がなくなり、効率的にヘッドを最適な姿勢に調整することができる。
しかしながら、本発明によれば、信号線が2本必要なリサージュ信号の信号強度ではなく測定光の光量(電流)を観測する。したがって、スケールに対するヘッドの姿勢を調整するための測定光の光量を1本の信号線で観測することができ、エンコーダの小型化やコスト削減を図ることができる。
図1は、本発明の一実施形態に係るエンコーダを示す斜視図である。
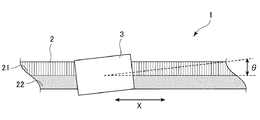
エンコーダ1は、図1に示すように、測定方向(X方向)に沿って目盛を有するスケール2と、スケール2のX方向に沿って相対移動してスケール2との相対移動量を検出するヘッド3と、を備える光電式リニアエンコーダである。
なお、以下の説明において、スケール2の長手方向でありヘッド3の移動方向をX方向と記す場合がある。
光源4は、例えばLEDが用いられ、スケール2に測定信号である測定光を照射(送信)する。
受光手段5は、スケール2の目盛21,22を介して測定光を受光し、受光した測定光の光量変化を電気信号にする。そして、受光手段5はこの電気信号から90°位相が異なる2相正弦波状信号(リサージュ信号)を検出する。
エンコーダ1は、受光手段5によって検出されたリサージュ信号に基づいてスケール2とヘッド3との相対移動量の検出を行う。
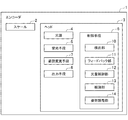
ヘッド3は、図2に示すように、ヘッド3を制御する制御手段6と、スケール2に対するヘッド3の姿勢を変更する姿勢変更手段7と、例えばエンコーダ1に接続するコンピュータのディスプレイ画面などに制御手段6によって演算されたスケール2とヘッド3との相対移動量を出力する出力手段8をさらに備える。
制御手段6は、検出部10と、フィードバック部11と、測定信号制御部である光量制御部12と、観測部13と、姿勢調整部14と、を備える。また、制御手段6は、受光手段5によって検出されたリサージュ信号からスケール2とヘッド3との相対移動量を演算している。
図3に示すように、エンコーダ1は、先ず、光量制御部12により制御された光量の測定光を光源4からスケール2に向かって照射する。次に、受光手段5は、スケール2に向かって照射された測定光を受光する。そして、検出部10は、受光手段5にて受光した測定光を検出信号として検出する。検出部10にて検出された検出信号は、フィードバック部11にてフィードバック信号として光量制御部12にフィードバックされる。光量制御部12は、フィードバック信号に基づいて光源4に照射させる測定光の光量を制御する。出力手段8は、制御手段6により検出信号から演算された相対移動量を出力する。
観測部13は、光源4からスケール2に向かって照射された測定光の光量を観測する。観測部13で観測された測定光の光量に基づいて、姿勢調整部14は、スケール2に対するヘッド3の姿勢を調整するための指令を姿勢変更手段7に出力する。
姿勢変更手段7は、図4に示すように、姿勢調整部14からの指令に基づいてスケール2に対するヘッド3の姿勢を調整する。
なお、以下の説明において、光源4および受光手段5の姿勢の調整を、ヘッド3の姿勢の調整と記す場合がある。
具体的には、図5(A)は、横軸をヘッド3のヨー角度θ、縦軸をリサージュ信号の信号強度Rとして、ヘッド3のヨー角度θの変化に対応するリサージュ信号の信号強度Rの変化を示すグラフであり、図5(B)は、横軸をヘッド3のヨー角度θ、縦軸を光源4の電流Iとして、ヘッド3のヨー角度θの変化に対応する電流Iの変化を示す図である。
以下、スケール2に対するヘッド3の姿勢を調整する際のリサージュ信号の信号強度Rおよび光源4の電流Iの変化について、図5を参照して説明する。
具体的には、電流Iが最も小さくなるとき、すなわち電流Iがmin(最適ヨー角度a)に達したとき、スケール2の目盛21,22とヘッド3の受光手段5とのアライメントが適切に調整され、最も効率よく受光手段5が測定光を受光できる状態である。
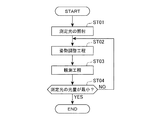
以下、スケール2に対するヘッド3の姿勢調整工程について、図6を参照して説明する。
エンコーダ1は、先ず、光源4からスケール2に向かって測定光を照射する(ステップST01)。次に、姿勢調整部14は姿勢変更手段7にスケール2に対するヘッド3のヨー角度θ方向の姿勢を調整する姿勢調整工程を実行する(ステップST02)。
姿勢変更手段7にてヘッド3の姿勢を調整した後、観測部13は、光源4がスケール2に向かって照射する測定光の光量を観測する観測工程を実行する(ステップST03)。そして、姿勢調整部14は、観測部13が観測した測定光の光量が最小であるか否かを判定する(ステップST04)。
姿勢調整部14が測定光の光量は最小ではないと判定したとき(ステップST04でNO)、ステップST02へと戻り、エンコーダ1は、測定光の光量を最小とするようにスケール2に対するヘッド3の姿勢を変更させる姿勢調整工程を実行する。
姿勢調整部14は、今回の観測工程にて観測した測定光の光量が前回の観測工程にて観測した測定光の光量よりも大きくなった場合、次回の姿勢調整工程ステップST02において、今回の姿勢調整工程ステップST02にてヘッド3を駆動させたヨー角度θ方向とは反対のヨー角度θ方向にヘッド3を駆動させる。
このように、姿勢調整部14は、観測工程にて観測する測定光の光量を減少させていき、観測工程にて観測する測定光の光量が変化しなくなった場合、または増加に転じた場合、測定光の光量が最小であると判定する。
(1)エンコーダ1は、フィードバック信号に基づいて測定光の光量を制御する光量制御部12と、測定光の光量を観測する観測部13と、を備えるため、リサージュ信号の信号強度Rではなく、光源4から照射される測定光の光量を用いてスケール2に対するヘッド3の姿勢の調整を行う。したがって、リサージュ信号の信号強度Rを観測するための外部機器等を用いずにスケール2に対するヘッド3の姿勢を調整することができる。
(3)エンコーダ1は、信号線が2本必要なリサージュ信号の信号強度Rではなく測定光の光量(電流I)を観測するため、スケール2に対するヘッド3の姿勢を調整するための測定光の光量を1本の信号線で観測することができ、エンコーダ1の小型化やコスト削減を図ることができる。
(5)光量制御部12は、フィードバック信号に基づいて測定光の光量(電流I)を制御するので、あらかじめ光源4に最適な電流条件を見つける必要がなくなり、作業の効率化を図ることができる。
(7)姿勢変更手段7が姿勢調整部14の指令に基づき光源4の電流Iが最小になるようにヘッド3の姿勢を調整することで光源4(LED)の劣化を抑制することができる。
なお、本発明は、前記実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
例えば、前記実施形態では、光電式リニアエンコーダを例として本発明をエンコーダ1に用いる場合を説明したが、エンコーダ1は、電磁誘導式エンコーダであってもよいし、静電容量式エンコーダであってもよい。すなわち、検出器の形式や検出方式等は特に限定されるものではない。また、エンコーダ1は、ロータリーエンコーダでもよい。すなわち、その他の測定器等においても利用可能であり、本発明を何に実装するかについては、特に限定されるものではない。
また、前記実施形態では、スケール2に対するヘッド3の姿勢の調整としてヨー角度θ方向の調整をしたが、ヘッド3の姿勢の調整方向はヨー角度θ方向に限らず、ロール角度方向やピッチ角度方向のヘッド3の姿勢を調整してもよい。
2 スケール
3 ヘッド
4 光源(送信手段)
5 受光手段(受信手段)
6 制御手段
7 姿勢変更手段
10 検出部
11 フィードバック部
12 光量制御部(測定信号制御部)
13 観測部
14 姿勢調整部
Claims (5)
- 測定方向に沿って目盛を有するスケールと、前記スケールに向かって測定信号を送信する送信手段と、前記スケールを介して前記測定信号を受信する受信手段とを有し、前記スケールの測定方向に沿って相対移動して前記スケールとの相対移動量を検出するヘッドと、前記ヘッドを制御する制御手段と、を備えるエンコーダであって、
前記制御手段は、
前記受信手段にて受信した前記測定信号を検出信号として検出する検出部と、
前記検出信号をフィードバック信号としてフィードバックするフィードバック部と、
前記フィードバック信号に基づいて前記測定信号の大きさを制御する測定信号制御部と、
前記測定信号の大きさを観測する観測部と、を備えることを特徴とするエンコーダ。 - 請求項1に記載されたエンコーダにおいて、
前記スケールに対する前記ヘッドの姿勢を変更する姿勢変更手段を備え、
前記制御手段は、
前記観測部にて観測された前記測定信号の大きさを最小とするように前記姿勢変更手段に前記スケールに対する前記ヘッドの姿勢を変更させる姿勢調整部を備えることを特徴とするエンコーダ。 - 測定方向に沿って目盛を有するスケールと、前記スケールに向かって測定光を照射する光源と、前記スケールを介して前記測定光を受光する受光手段とを有し、前記スケールの測定方向に沿って相対移動して前記スケールとの相対移動量を検出するヘッドと、前記ヘッドを制御する制御手段と、を備えるエンコーダであって、
前記制御手段は、
前記受光手段にて受光した前記測定光を検出信号として検出する検出部と、
前記検出信号をフィードバック信号としてフィードバックするフィードバック部と、
前記フィードバック信号に基づいて前記測定光の光量を制御する光量制御部と、
前記測定光の光量を観測する観測部と、を備えることを特徴とするエンコーダ。 - 請求項3に記載されたエンコーダにおいて、
前記スケールに対する前記ヘッドの姿勢を変更する姿勢変更手段を備え、
前記制御手段は、
前記観測部にて観測された測定光の光量を最小とするように前記姿勢変更手段に前記スケールに対する前記ヘッドの姿勢を変更させる姿勢調整部を備えることを特徴とするエンコーダ。 - 測定方向に沿って目盛を有するスケールと、前記スケールに向かって測定信号を送信する送信手段と、前記スケールを介して前記測定信号を受信する受信手段とを有し、前記スケールの測定方向に沿って相対移動して前記スケールとの相対移動量を検出するヘッドと、前記ヘッドを制御する制御手段と、を備えるエンコーダの調整方法であって、
前記制御手段は、
前記受信手段にて受信した前記測定信号を検出信号として検出する検出部と、
前記検出信号をフィードバック信号としてフィードバックするフィードバック部と、
前記フィードバック信号に基づいて前記測定信号の大きさを制御する測定信号制御部と、を備え、
前記測定信号の大きさを観測する観測工程と、
前記観測工程にて観測された前記測定信号の大きさを最小とするように前記スケールに対する前記ヘッドの姿勢を変更する姿勢調整工程と、を備えることを特徴とするエンコーダの調整方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016236533A JP6932425B2 (ja) | 2016-12-06 | 2016-12-06 | エンコーダおよびその調整方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016236533A JP6932425B2 (ja) | 2016-12-06 | 2016-12-06 | エンコーダおよびその調整方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018091777A true JP2018091777A (ja) | 2018-06-14 |
| JP6932425B2 JP6932425B2 (ja) | 2021-09-08 |
Family
ID=62564669
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016236533A Expired - Fee Related JP6932425B2 (ja) | 2016-12-06 | 2016-12-06 | エンコーダおよびその調整方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6932425B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021128086A (ja) * | 2020-02-14 | 2021-09-02 | 株式会社Ihi | 渦電流探傷装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6177170U (ja) * | 1984-10-25 | 1986-05-23 | ||
| JPS62114787A (ja) * | 1985-11-13 | 1987-05-26 | Toyota Motor Corp | 溶接位置補正装置付レ−ザ−溶接装置 |
| JPH0339684A (ja) * | 1989-07-05 | 1991-02-20 | Fuji Photo Film Co Ltd | フォトセンサーの調節位置判定装置 |
| JPH05335355A (ja) * | 1992-05-27 | 1993-12-17 | Sharp Corp | 半導体レーザ素子の製造方法 |
| JPH102711A (ja) * | 1996-06-18 | 1998-01-06 | Minolta Co Ltd | 3次元計測装置 |
| JP2004347504A (ja) * | 2003-05-23 | 2004-12-09 | Mitsubishi Electric Corp | 光学式エンコーダ |
| JP2007232681A (ja) * | 2006-03-03 | 2007-09-13 | Mitsutoyo Corp | 光電式エンコーダ |
| JP2011033368A (ja) * | 2009-07-30 | 2011-02-17 | Mitsutoyo Corp | 光学式エンコーダ |
| JP2014035216A (ja) * | 2012-08-07 | 2014-02-24 | Fujitsu Ltd | 光学式ロータリーエンコーダ及びその補正方法 |
-
2016
- 2016-12-06 JP JP2016236533A patent/JP6932425B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6177170U (ja) * | 1984-10-25 | 1986-05-23 | ||
| JPS62114787A (ja) * | 1985-11-13 | 1987-05-26 | Toyota Motor Corp | 溶接位置補正装置付レ−ザ−溶接装置 |
| JPH0339684A (ja) * | 1989-07-05 | 1991-02-20 | Fuji Photo Film Co Ltd | フォトセンサーの調節位置判定装置 |
| JPH05335355A (ja) * | 1992-05-27 | 1993-12-17 | Sharp Corp | 半導体レーザ素子の製造方法 |
| JPH102711A (ja) * | 1996-06-18 | 1998-01-06 | Minolta Co Ltd | 3次元計測装置 |
| JP2004347504A (ja) * | 2003-05-23 | 2004-12-09 | Mitsubishi Electric Corp | 光学式エンコーダ |
| JP2007232681A (ja) * | 2006-03-03 | 2007-09-13 | Mitsutoyo Corp | 光電式エンコーダ |
| JP2011033368A (ja) * | 2009-07-30 | 2011-02-17 | Mitsutoyo Corp | 光学式エンコーダ |
| JP2014035216A (ja) * | 2012-08-07 | 2014-02-24 | Fujitsu Ltd | 光学式ロータリーエンコーダ及びその補正方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021128086A (ja) * | 2020-02-14 | 2021-09-02 | 株式会社Ihi | 渦電流探傷装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6932425B2 (ja) | 2021-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5684578A (en) | Laser alignment head for use in shaft alignment | |
| JP5653581B2 (ja) | 測定システム | |
| US9970744B2 (en) | Method for operating a coordinate measuring machine | |
| EP2264400A2 (en) | Rotary laser emitting apparatus | |
| US11054249B2 (en) | Profile measuring apparatus | |
| JP2018535423A (ja) | 回転レーザの鉛直軸線を検査及び/又は較正する方法 | |
| US20180095166A1 (en) | Measurement device and measurement method | |
| CN108356389B (zh) | 电弧传感器调整装置以及电弧传感器调整方法 | |
| US10012831B2 (en) | Optical monitoring of scan parameters | |
| JP2012112953A (ja) | 回転レーザ装置および回転レーザ装置の方向の設定方法 | |
| US20240159532A1 (en) | Laser Level with Adjustable Direct Projection to Targets | |
| US20170038245A1 (en) | A device for measuring the frequency of vibrations on a tight drive belt and a method for carrying out the vibration frequency measurement | |
| US10935968B2 (en) | Robot, robot system, and method for setting coordinate system of robot | |
| US20110246113A1 (en) | Feedback apparatus and feedback method for controlling a servomotor | |
| US10514292B2 (en) | Optical probe and measuring apparatus utilizing resonant scanners driven in synchronization with separate and coaxial drive axes | |
| US10677584B2 (en) | Displacement measuring apparatus | |
| US20130181132A1 (en) | Intrusion detection apparatus and method | |
| JP2018091777A (ja) | エンコーダおよびその調整方法 | |
| US7486409B2 (en) | Displacement sensor | |
| CN106123787B (zh) | 激光位移传感器的控制系统和方法 | |
| US20150062568A1 (en) | Reference systems for indicating slope and alignment and related devices, systems, and methods | |
| CN108168453A (zh) | 磁致动的光纤应变校准装置及其校准方法 | |
| JP2020076695A (ja) | プロファイル測定装置 | |
| US20150068310A1 (en) | Sensor with oblique-angle display | |
| JP2010156659A (ja) | レーザー墨出し器の校正方法、校正プログラムおよび電子ジャイロ方式レーザー墨出し器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201020 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210521 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210817 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210817 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6932425 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |