JP2018093724A - 車両用制御装置及び鉄道車両 - Google Patents
車両用制御装置及び鉄道車両 Download PDFInfo
- Publication number
- JP2018093724A JP2018093724A JP2018006670A JP2018006670A JP2018093724A JP 2018093724 A JP2018093724 A JP 2018093724A JP 2018006670 A JP2018006670 A JP 2018006670A JP 2018006670 A JP2018006670 A JP 2018006670A JP 2018093724 A JP2018093724 A JP 2018093724A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- vehicle
- inverter
- current
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
- H02P29/0243—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load the fault being a broken phase
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/003—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to inverters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L9/00—Electric propulsion with power supply external to the vehicle
- B60L9/16—Electric propulsion with power supply external to the vehicle using AC induction motors
- B60L9/18—Electric propulsion with power supply external to the vehicle using AC induction motors fed from DC supply lines
- B60L9/22—Electric propulsion with power supply external to the vehicle using AC induction motors fed from DC supply lines polyphase motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
- H02P27/085—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation wherein the PWM mode is adapted on the running conditions of the motor, e.g. the switching frequency
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/429—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/10—Driver interactions by alarm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Multiple Motors (AREA)
Abstract
【課題】低速度域における異常の発生を速やかに検知することができる車両用制御装置及びこれを備えた鉄道車両を提供すること。
【解決手段】車両用制御装置4は、直流電力を3相の交流電力に変換し、車両を駆動するモータ8に供給するインバータ6を備える。検出器7a、7bは、インバータ6とモータ8との間の電流値を検出する。制御部9は、検出器7a、7bが検出した電流値、速度指令信号、及びモータ8のロータ周波数に基づき、インバータ6をPWM制御する。制御部9は、ロータ周波数が所定値以下で、PWM変調率が所定値以上である場合に、異常が発生したと判定する。
【選択図】図1
【解決手段】車両用制御装置4は、直流電力を3相の交流電力に変換し、車両を駆動するモータ8に供給するインバータ6を備える。検出器7a、7bは、インバータ6とモータ8との間の電流値を検出する。制御部9は、検出器7a、7bが検出した電流値、速度指令信号、及びモータ8のロータ周波数に基づき、インバータ6をPWM制御する。制御部9は、ロータ周波数が所定値以下で、PWM変調率が所定値以上である場合に、異常が発生したと判定する。
【選択図】図1
Description
本発明の実施形態は、車両用制御装置及び鉄道車両に関する。
鉄道車両には、車両を駆動するモータと、架線から電力を受け取り、必要な電圧・電流に変換してモータに供給する車両用制御装置とが設けられている。車両用制御装置における電圧・電流の変換は主にインバータ装置により行われる。例えば、インバータ装置から出力される3相交流がモータに供給される。
インバータ装置を駆動するための指令線の断線や、インバータ装置の出力である3相交流の欠相等の異常が発生した場合、モータを正常に駆動させることができない。そのため、欠相等の異常を速やかに、特に車両の低速度域において、検知することが求められている。
本発明が解決しようとする課題は、低速度域における異常の発生を速やかに検知することができる車両用制御装置及びこれを備えた鉄道車両を提供することである。
実施形態の車両用制御装置は、直流電力を3相の交流電力に変換し、車両を駆動するモータに供給するインバータを備える。検出器は、インバータとモータとの間の電流値を検出する。制御部は、検出器が検出した電流値、速度指令信号、及びモータのロータ周波数に基づき、インバータをPWM制御する。制御部は、車両の速度が低速度域であるか否かを判定する速度判定部と、速度判定部が、車両の速度が低速度域であると判定したとき、PWM変調率が所定値より大きいか否かを判定する変調率判定部とを有し、車両の速度が低速度域であり、かつ、PWM変調率が所定値より大きいとき、異常が発生したと判定する。
以下、本発明の実施の形態を図面に基づいて説明する。
図1は、本実施形態に係る車両用制御装置の概略構成を示している。車両用制御装置4は、コンバータ5、インバータ6、及びコントローラ(制御部)9を備えている。コントローラ9は車両用制御装置4の外部に設けることも可能である。図1に示すように、交流架線10からパンタグラフ1を介して集電された交流電力が、断流器(VCB:Vacuum Circuit Breaker)2、メイントランス3を通してコンバータ5に取り込まれる。
コンバータ5は、取り込んだ交流電力を、直流電力に変換して出力する。コンバータ5は、例えばPWM(Pulse Width Modulation:パルス幅変調)コンバータであり、IGBT(Insulated Gate Bipolar Transistor:絶縁ゲートバイポーラトランジスタ)等の半導体スイッチング素子や、半導体スイッチング素子に並列に接続されたダイオード又はクランプダイオード等を内蔵している。半導体スイッチング素子のオン/オフはコントローラ9により制御される。
インバータ6は、コンバータ5から出力された直流電力を交流電力に変換し、位相が相互に120°ずれたU相、V相、W相の3相交流を生成する。インバータ6は、IGBT等の半導体スイッチング素子や、半導体スイッチング素子に並列に接続されたダイオード又はクランプダイオード等を内蔵するVVVF(Variable Voltage Variable Frequency)インバータである。インバータ6の半導体スイッチング素子は、コントローラ9から出力されたゲート信号によりオン/オフ動作する。すなわち、コントローラ9は、コンバータ5から出力された直流電力に対して、PWM方式による変調が行われるようインバータ6の半導体スイッチング素子を制御する。
インバータ6は、生成した3相交流をモータ(3相誘導電動機)8に供給し、鉄道車両を駆動制御する。モータ8は、そのロータ(図示せず)が歯車などを介して駆動用車輪の車軸と接続されるか、またはロータが駆動用車輪の車軸と直接接続されて、鉄道車両を駆動する。また、ロータの角度(位置)を検出するロータリーエンコーダ等の角度検出手段(図示せず)が設けられており、コントローラ9は、角度検出手段から検出結果を取得する。コントローラ9は、角度検出手段の検出結果に基づいてロータ周波数(モータ速度)を算出することができる。
図1に示すように、インバータ6から出力される3相電流のうちの2相の相電流値を検出する電流検出器7a、7bが設けられている。コントローラ9は、電流検出器7a、7bが検出した電流値を取得する。3相交流では、2相の電流値を加算して符号を逆にしたものが、残りの1相の電流値となる。そのため、電流検出器7a、7bが検出した電流値から、電流検出器7a、7bの設けられていない相の相電流を求めることができる。
コントローラ9は、速度指令信号と現在のモータ速度とを比較して加速/減速の指令を生成する速度制御部91、速度制御部91からの指令と電流検出器7a、7bで検出された電流値から求めた現在のモータ電流とを用いて電流指令値を生成する電流制御部92、及び電流指令値に対応するモータ電流が流れるようにPWM信号を生成してインバータ6へ送信するPWM信号生成部93を有する。インバータ6の半導体スイッチング素子はPWM信号に基づいてオン・オフ動作する。また、PWM信号生成部93は、コンバータ5の半導体スイッチング素子をオン・オフ動作させるPWM信号を生成して、コンバータ5へ送信する。
また、図1に示すように、コントローラ9は、車両速度が所定値以下の低速度域にあるか否かを判定する速度判定部94、及びインバータ6のPWM変調率(PWMのパルス幅の割合)が所定値より大きいか否か判定する変調率判定部95、及び電流判定部96を有する。例えば、速度判定部94は、ロータ周波数が所定値未満の場合、車両速度が低速度域にあり、所定値以上の場合、車両速度は低速度域にないと判定する。PWM変調率(以下、単に「変調率」とも称する)については後述する。
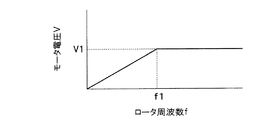
図2は、通常時(異常が発生していない時)のロータ周波数fとモータ電圧Vとの関係を示すグラフである。図2に示すように、VVVFインバータのベクトル制御では、所定の周波数(図中、周波数f1)以下の範囲では、ロータ周波数fとモータ電圧Vとは比例関係にある。そして、ロータ周波数fが周波数f1以上となると、モータ電圧Vが電圧V1で一定となるように制御される。
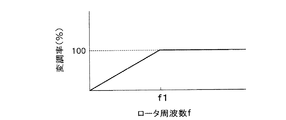
図3は、通常時のロータ周波数fと変調率との関係を示すグラフである。変調率は例えば以下の式で算出することができる。
変調率(%)=現在のモータ電圧/モータ最大電圧
ここでモータ最大電圧は、図2の電圧V1に相当する。また、現在のモータ電圧は、電流指令値に基づいて算出することができる。
変調率(%)=現在のモータ電圧/モータ最大電圧
ここでモータ最大電圧は、図2の電圧V1に相当する。また、現在のモータ電圧は、電流指令値に基づいて算出することができる。
図2、図3に示すように、モータ電圧Vが一定となるとき、変調率は100%となる。また、図3に示すように、ロータ周波数が低い場合、すなわち車両速度が低い場合、変調率とロータ周波数fとは比例関係にある。
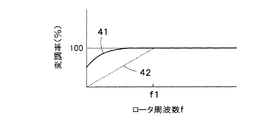
ここで、車両用制御装置14に何らかの異常が発生した場合、ロータ周波数fと変調率との関係は、図4に示すグラフ41のようになる。比較のため、通常時のロータ周波数fと変調率との関係を破線42で示している。異常が発生し、電流指令値に対応する実電流が流れなくなると、変調率(モータ電圧)を上げて所望の電流が流れるような制御が行われる。そのため、異常発生時は、通常時と比較して、低速度域(ロータ周波数fが低い領域)において、電流指令値が大きくなる。つまり、現在のモータ電圧が高くなるため、変調率が高くなる。
そのため、本実施形態では、このような特性を利用して、低速度域において変調率が所定の閾値を超えた場合、コントローラ9が車両用制御装置4に異常が発生したと判断し、異常発生を報知する。例えば、車両の(通常走行時の)最高速度の30%以下を低速度域とみなし、ロータ周波数fが0.3×f1に達していない状態で、変調率が30%を超えた場合、コントローラ9は異常が発生したと判断する。
このように、変調率を利用することで、低速度域において、異常の発生を速やかに検知することができる。
さらに、コントローラ9は、異常が発生したと判断した後、電流検出器7a及び7bが検出した電流値を用いて、発生した異常が欠相であるか否かを判定することができる。電流検出器7aが検出した電流値、電流検出器7bが検出した電流値、または電流検出器7a及び7bが検出した電流値の和が所定の閾値未満である場合、コントローラ9は、発生した異常が欠相であると判断する。
このような異常及び欠相の検知方法を、図5に示すフローチャートを用いて説明する。
(ステップS101)速度判定部94により、車両速度が所定値未満であるか否かが判定される。車両速度が所定値未満である場合は、速度判定部94は変調率判定部95へ判定要求信号を送る(つまり、ステップS102へ進む)。車両速度が所定値以上である場合は処理が終了する。本実施形態では、低速度域における異常(欠相)の発生を検知するためである。ここで、車両速度はロータ周波数f(モータ速度)に置き換えてもよい。
(ステップS102)速度判定部94からの判定要求信号が入力された変調率判定部95は、PWM変調率が所定値より大きいか否かを判定する。PWM変調率が所定値より大きい場合は、異常が発生したと判定し、変調率判定部95から電流判定部96へ電流判定要求信号が出力される(つまり、ステップS103へ進む)。PWM変調率が所定値以下の場合は処理が終了する。なお、異常が発生したとの判定は、PWM変調率が所定値より大きい状態が一定時間継続することを条件としてもよい。
(ステップS103)電流指令値に対応した実電流が流れなくなっているため、装置に何らかの異常が発生したと判定する。
(ステップS104)変調率判定部95からの電流判要求頼信号が入力された電流判定部96は、電流検出器7a、7bが検出した電流値を取得する。電流検出器7aの検出した電流値、電流検出器7bが検出した電流値、または電流検出器7a及び7bが検出した電流値の和が、電流判定部96に予め設定されている所定値未満の場合は、発生した異常は欠相であると判定する(つまり、ステップS105へ進む)。
(ステップS105)コントローラ9の電流判定部96は、発生した異常は欠相であると判定する。例えば、電流検出器7aの検出値が所定値未満である場合、電流検出器7aが設けられた配線に断線が生じたと判定される。また、電流検出器7bの検出値が所定値未満である場合、電流検出器7bが設けられた配線に断線が生じたと判定される。また、電流検出器7a及び7bの検出値の和が所定値未満である場合、電流検出器7a、7bが設けられていない配線に断線が生じたと判定される。このとき、必要に応じて外部へ異常発生の信号を出力し、外部表示器で表示を行うことも可能である。
このように、変調率と、電流検出器7a、7bの検出結果を用いることで、車両の低速度域において、欠相の発生を的確に検知することができる。
なお、ステップS104において、電流検出器7aの検出値、電流検出器7bの検出値、電流検出器7a及び7bの検出値の和が所定値以上の場合は、欠相以外の異常(故障)が発生したと判定される。
図6に示すように、2つのモータ8a、8bを設けた構成にしてもよい。3相交流が流れる配線は分岐点16により第1配線と第2配線とに分岐し、第1配線がモータ8aに接続され、第2配線がモータ8bに接続される。図6に示す構成では、電流検出器7a、7bが、インバータ6と分岐点16との間に設けられているが、この構成は、分岐点16とモータ8a、8bとの間で欠相が生じた場合、異常が発生したことは検知できるが、どの相で欠相が生じたかを検知することができない。
そのため、図7に示すように、2つのモータ8a、8bを設ける場合は、分岐点16とモータ8a、8bとの間に、それぞれ電流検出器7a、7bを設けることが好ましい。各モータ8a、8bに対応して電流検出器7a、7bを設けることで、どの相で欠相が生じたかを検知することができる。
上記実施形態では、インバータ6とモータ8との間に流れる3相電流のうちの2相の相電流を検出する電流検出器7a、7bを設ける例について説明したが、3つの電流検出器を設け、各相の相電流を検出するようにしてもよい。
上記実施形態では架線10が交流架線(交流電源)の場合を例として説明したが、架線10を直流架線(直流電源)としてもよく、その場合、メイントランス3やコンバータ5を省略し、リアクトル及びコンデンサからなるLCフィルタを設ければよい。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
Claims (7)
- 直流電力を3相の交流電力に変換し、車両を駆動するモータに供給するインバータと、
前記インバータと前記モータとの間の電流値を検出する検出器と、
前記検出器が検出した電流値、速度指令信号、及び前記モータのロータ周波数に基づき、前記インバータをPWM制御する制御部と、
を備え、
前記制御部は、
前記車両の速度が低速度域であるか否かを判定する速度判定部と、
前記速度判定部が、前記車両の速度が低速度域であると判定したとき、PWM変調率が所定値より大きいか否かを判定する変調率判定部とを有し、
前記車両の速度が低速度域であり、かつ、PWM変調率が所定値より大きいとき、異常が発生したと判定することを特徴とする車両用制御装置。 - 前記制御部は、異常が発生したと判定した際に、前記検出器が検出した電流値が所定値未満である場合、欠相による異常であると判定することを特徴とする請求項1に記載の車両用制御装置。
- 前記インバータは、前記3相の交流電力を、車両を駆動する第1モータ及び第2モータに供給することを特徴とする請求項1に記載の車両用制御装置。
- 前記インバータと前記第1モータ及び第2モータとを接続する配線は、分岐点において第1配線及び第2配線に分岐し、前記第1配線は前記第1モータに接続され、前記第2配線は前記第2モータに接続され、
前記検出器は、前記第1配線に設けられた第1の検出器と前記第2配線に設けられた第2の検出器とで構成されることを特徴とする請求項3に記載の車両用制御装置。 - 前記第1の検出器が検出した電流値、前記第2の検出器が検出した電流値、または、前記第1の検出器および第2の検出器が検出した2つの電流値の和が所定の閾値未満である場合、前記制御部は、前記欠相による異常であると判定することを特徴とする請求項4に記載の車両用制御装置。
- 請求項1に記載の車両用制御装置と、
前記インバータから前記3相の交流電力が供給されるモータと、
を備える鉄道車両。 - 請求項3に記載の車両用制御装置と、
前記インバータから前記3相の交流電力が供給される第1のモータおよび第2のモータと、
を備える鉄道車両。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013164539 | 2013-08-07 | ||
| JP2013164539 | 2013-08-07 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015530884A Division JPWO2015020009A1 (ja) | 2013-08-07 | 2014-08-04 | 車両用制御装置及び鉄道車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018093724A true JP2018093724A (ja) | 2018-06-14 |
Family
ID=52461341
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015530884A Pending JPWO2015020009A1 (ja) | 2013-08-07 | 2014-08-04 | 車両用制御装置及び鉄道車両 |
| JP2018006670A Pending JP2018093724A (ja) | 2013-08-07 | 2018-01-18 | 車両用制御装置及び鉄道車両 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015530884A Pending JPWO2015020009A1 (ja) | 2013-08-07 | 2014-08-04 | 車両用制御装置及び鉄道車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9837950B2 (ja) |
| JP (2) | JPWO2015020009A1 (ja) |
| CN (1) | CN105493395B (ja) |
| WO (1) | WO2015020009A1 (ja) |
| ZA (1) | ZA201600694B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112021007940T5 (de) | 2021-07-08 | 2024-06-20 | Mitsubishi Electric Corporation | Steuerungseinrichtung, elektrisches schienenfahrzeug und steuerungsverfahren |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017017785A (ja) * | 2015-06-29 | 2017-01-19 | 株式会社日立産機システム | 電動巻上機 |
| EP3279024A1 (de) * | 2016-08-01 | 2018-02-07 | Siemens Aktiengesellschaft | Antriebssystem für ein schienenfahrzeug |
| JP6851504B2 (ja) * | 2017-12-28 | 2021-03-31 | 三菱電機株式会社 | 電気車制御装置 |
| CN111656678B (zh) * | 2018-02-06 | 2023-05-02 | 三菱电机株式会社 | 变频控制装置 |
| US10715052B2 (en) * | 2018-08-22 | 2020-07-14 | Caterpillar Inc. | Inverter topology |
| CN112236931B (zh) * | 2019-05-14 | 2023-12-22 | 东芝三菱电机产业系统株式会社 | 电力变换装置的缺相检测装置 |
| DE112019007918T5 (de) | 2019-11-28 | 2022-09-08 | Mitsubishi Electric Corporation | Antriebssteuervorrichtung und antriebssteuerverfahren |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02246701A (ja) * | 1989-03-16 | 1990-10-02 | Hitachi Ltd | 電気車用制御装置 |
| JPH06245301A (ja) * | 1993-02-17 | 1994-09-02 | Hitachi Ltd | 電気車制御装置の欠相検知方式 |
| JP2000060196A (ja) * | 1998-08-10 | 2000-02-25 | Hitachi Ltd | 電力変換器の制御装置 |
| JP2011147317A (ja) * | 2010-01-18 | 2011-07-28 | Toshiba Mitsubishi-Electric Industrial System Corp | 交流電動機の監視装置 |
| JP2012065416A (ja) * | 2010-09-15 | 2012-03-29 | Jtekt Corp | モータ制御装置及び電動パワーステアリング装置 |
| JP2013031356A (ja) * | 2011-06-24 | 2013-02-07 | Mitsubishi Electric Corp | モータ制御装置およびそれを用いた電動パワーステアリング装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4724503A (en) * | 1985-03-01 | 1988-02-09 | Square D Company | Phase unbalance detector |
| JP2980698B2 (ja) * | 1991-01-17 | 1999-11-22 | 株式会社東芝 | インバータ装置 |
| JP3771104B2 (ja) * | 2000-03-13 | 2006-04-26 | 日野自動車株式会社 | アクチュエータの駆動制御回路 |
| JP4086178B2 (ja) | 2002-05-24 | 2008-05-14 | 三菱電機株式会社 | 電動機制御装置の欠相検知方法 |
| JP2005295734A (ja) * | 2004-04-02 | 2005-10-20 | Matsushita Electric Ind Co Ltd | 衝突検知装置および方法 |
| JP2005312149A (ja) * | 2004-04-20 | 2005-11-04 | Matsushita Electric Ind Co Ltd | 衝突検知装置および方法 |
| JP5070867B2 (ja) * | 2007-02-05 | 2012-11-14 | 株式会社ジェイテクト | モータ制御装置及び電動パワーステアリング装置 |
| JP2008206276A (ja) * | 2007-02-19 | 2008-09-04 | Toyota Motor Corp | 異常判定装置 |
| JP5470697B2 (ja) * | 2007-06-20 | 2014-04-16 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| EP2015445B1 (en) | 2007-06-20 | 2011-12-14 | Jtekt Corporation | Motor controller and electric power steering apparatus |
| JP5057908B2 (ja) * | 2007-09-13 | 2012-10-24 | オムロンオートモーティブエレクトロニクス株式会社 | 多相交流モータ駆動装置 |
| JP5014034B2 (ja) | 2007-09-12 | 2012-08-29 | オムロンオートモーティブエレクトロニクス株式会社 | 多相交流モータ駆動装置 |
| JP4240149B1 (ja) * | 2008-02-14 | 2009-03-18 | トヨタ自動車株式会社 | モータ駆動装置およびハイブリッド駆動装置 |
| CN102004224B (zh) * | 2009-08-31 | 2012-12-12 | 比亚迪股份有限公司 | 一种三相电机缺相的检测系统及其检测方法 |
-
2014
- 2014-08-04 JP JP2015530884A patent/JPWO2015020009A1/ja active Pending
- 2014-08-04 WO PCT/JP2014/070512 patent/WO2015020009A1/ja not_active Ceased
- 2014-08-04 CN CN201480047182.6A patent/CN105493395B/zh active Active
-
2016
- 2016-01-25 US US15/005,402 patent/US9837950B2/en active Active
- 2016-02-01 ZA ZA2016/00694A patent/ZA201600694B/en unknown
-
2018
- 2018-01-18 JP JP2018006670A patent/JP2018093724A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02246701A (ja) * | 1989-03-16 | 1990-10-02 | Hitachi Ltd | 電気車用制御装置 |
| JPH06245301A (ja) * | 1993-02-17 | 1994-09-02 | Hitachi Ltd | 電気車制御装置の欠相検知方式 |
| JP2000060196A (ja) * | 1998-08-10 | 2000-02-25 | Hitachi Ltd | 電力変換器の制御装置 |
| JP2011147317A (ja) * | 2010-01-18 | 2011-07-28 | Toshiba Mitsubishi-Electric Industrial System Corp | 交流電動機の監視装置 |
| JP2012065416A (ja) * | 2010-09-15 | 2012-03-29 | Jtekt Corp | モータ制御装置及び電動パワーステアリング装置 |
| JP2013031356A (ja) * | 2011-06-24 | 2013-02-07 | Mitsubishi Electric Corp | モータ制御装置およびそれを用いた電動パワーステアリング装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112021007940T5 (de) | 2021-07-08 | 2024-06-20 | Mitsubishi Electric Corporation | Steuerungseinrichtung, elektrisches schienenfahrzeug und steuerungsverfahren |
| US12365371B2 (en) | 2021-07-08 | 2025-07-22 | Mitsubishi Electric Corporation | Control device, electrical railway vehicle, and control method |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160142004A1 (en) | 2016-05-19 |
| WO2015020009A1 (ja) | 2015-02-12 |
| US9837950B2 (en) | 2017-12-05 |
| ZA201600694B (en) | 2018-11-28 |
| CN105493395B (zh) | 2018-04-13 |
| JPWO2015020009A1 (ja) | 2017-03-02 |
| CN105493395A (zh) | 2016-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018093724A (ja) | 車両用制御装置及び鉄道車両 | |
| US8228008B2 (en) | Motor controlling apparatus | |
| JP2009050059A (ja) | 異常検出装置 | |
| JP2015208143A (ja) | 電動機駆動装置 | |
| JP2018148695A (ja) | 回転電機制御装置、および、これを用いた電動パワーステアリング装置 | |
| JP2022120677A (ja) | 回転電機制御システム | |
| JP6409966B2 (ja) | モータ制御装置とモータ制御方法 | |
| JP5296942B1 (ja) | 制御装置 | |
| JP2014087233A (ja) | 3相交流モータの制御装置及び制御方法 | |
| JP2016123141A (ja) | 電動機システム | |
| JP6674765B2 (ja) | 電動機の制御装置及びそれを用いた電動車両 | |
| JP2011244577A (ja) | インバータ回路故障検出装置 | |
| JP2011223733A (ja) | 電流センサ異常検出装置および車両駆動システム | |
| JP6776961B2 (ja) | インバータ制御装置及びインバータ制御方法 | |
| JP6245472B2 (ja) | 電気車制御装置 | |
| JP2015006021A (ja) | モータ駆動装置及びモータ | |
| JP6627633B2 (ja) | 電力変換器の制御装置 | |
| JP2013158091A (ja) | 回転電機制御システム | |
| JP4784290B2 (ja) | モータ駆動装置 | |
| US11396236B2 (en) | Electric vehicle control device | |
| JP2014155371A (ja) | 電気自動車 | |
| JP2013135516A (ja) | 電力変換装置及び空気調和機 | |
| JP6847697B2 (ja) | 電気車制御装置 | |
| JP6477397B2 (ja) | 電力制御方法、及び、電力制御装置 | |
| JP6458683B2 (ja) | 電力制御方法、及び、電力制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181031 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190416 |