JP2018100837A - エンコーダー、ロボットおよびプリンター - Google Patents
エンコーダー、ロボットおよびプリンター Download PDFInfo
- Publication number
- JP2018100837A JP2018100837A JP2016245139A JP2016245139A JP2018100837A JP 2018100837 A JP2018100837 A JP 2018100837A JP 2016245139 A JP2016245139 A JP 2016245139A JP 2016245139 A JP2016245139 A JP 2016245139A JP 2018100837 A JP2018100837 A JP 2018100837A
- Authority
- JP
- Japan
- Prior art keywords
- light
- plate
- phase difference
- encoder
- light receiving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1602—Program controls characterised by the control system, structure, architecture
- B25J9/161—Hardware, e.g. neural networks, fuzzy logic, interfaces, processor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J11/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, for supporting or handling copy material in sheet or web form
- B41J11/66—Applications of cutting devices
- B41J11/663—Controlling cutting, cutting resulting in special shapes of the cutting line, e.g. controlling cutting positions, e.g. for cutting in the immediate vicinity of a printed image
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/21—Ink jet for multi-colour printing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/344—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using polarisation
- G01D5/345—Polarising encoders
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/28—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 for polarising
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B5/00—Optical elements other than lenses
- G02B5/30—Polarising elements
- G02B5/3083—Birefringent or phase retarding elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J19/00—Character- or line-spacing mechanisms
- B41J19/18—Character-spacing or back-spacing mechanisms; Carriage return or release devices therefor
- B41J19/20—Positive-feed character-spacing mechanisms
- B41J19/202—Drive control means for carriage movement
- B41J19/205—Position or speed detectors therefor
- B41J19/207—Encoding along a bar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
- G01D5/34715—Scale reading or illumination devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/3473—Circular or rotary encoders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/08—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving optical means for indicating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/12—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving photoelectric means
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Optics & Photonics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Fuzzy Systems (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Robotics (AREA)
- Optical Transform (AREA)
- Manipulator (AREA)
Abstract
【課題】低コスト化を図ることができるエンコーダーを提供すること、また、かかるエンコーダーを備えるロボットおよびプリンターを提供すること。【解決手段】位相差板を有する光学スケールと、前記位相差板に照射する光を出射する光源部と、前記位相差板からの前記光を受光し、その受光強度に応じた信号を出力する受光部と、を備えることを特徴とするエンコーダー。前記光源部が出射する前記光は、直線偏光しており、前記受光部は、前記位相差板からの前記光の偏光状態に応じた信号を出力する。【選択図】図1
Description
本発明は、エンコーダー、ロボットおよびプリンターに関するものである。
エンコーダーの一種として光学式のロータリーエンコーダーが一般に知られている(例えば特許文献1参照)。ロータリーエンコーダーは、例えば、回動可能な関節部を有するロボットアームを備えるロボットに用いられ、関節部の回転角度、回転位置、回転数、回転速度等の回動状態を検出する。
例えば、特許文献1に係るエンコーダーユニットは、光学スケールと、光学センサーパッケージと、を有する。そして、光学スケールは、中心を基準として回転する偏光子を有する。また、光学センサーパッケージは、偏光子の中心を介して180°対称の位置で偏光子に対向する2つの光学センサーを有する。
しかし、特許文献1に係るエンコーダーは、光学スケールに設けられている偏光子の製造コストが高く、その結果、エンコーダーの低コスト化を図ることが難しいという問題がある。
本発明の目的は、低コスト化を図ることができるエンコーダーを提供すること、また、かかるエンコーダーを備えるロボットおよびプリンターを提供することにある。
上記目的は、下記の本発明により達成される。
本発明のエンコーダーは、位相差板を有する光学スケールと、
前記位相差板に照射する光を出射する光源部と、
前記位相差板からの前記光を受光し、その受光強度に応じた信号を出力する受光部と、を備えることを特徴とする。
本発明のエンコーダーは、位相差板を有する光学スケールと、
前記位相差板に照射する光を出射する光源部と、
前記位相差板からの前記光を受光し、その受光強度に応じた信号を出力する受光部と、を備えることを特徴とする。
このようなエンコーダーによれば、位相差板からの光の偏光状態が光学スケールの回動状態に応じて変化するため、受光部の受光結果を用いて、光学スケールの回動状態を検出することができる。したがって、光学スケールに偏光板を用いることなく、光学スケールの回動状態を検出することができる。また、位相差板の製造コストは比較的安価であるため、エンコーダーの低コスト化を図ることができる。なお、位相差板は、直交する2つの偏光成分に位相差(光路差)を生じさせる光学素子であり、特に、1/4波長分の位相差を生じさせる光学素子をλ/4板と言い、また、1/2波長分の位相差を生じさせる光学素子をλ/2板と言う。
本発明のエンコーダーでは、前記位相差板は、λ/4板であり、
前記光学スケールは、前記位相差板に対して前記光源部とは反対側に配置されている光反射性を有する反射板を備えることが好ましい。
これにより、反射型のエンコーダーを実現することができる。
前記光学スケールは、前記位相差板に対して前記光源部とは反対側に配置されている光反射性を有する反射板を備えることが好ましい。
これにより、反射型のエンコーダーを実現することができる。
本発明のエンコーダーでは、前記位相差板は、λ/2板であり、
前記位相差板の少なくとも一部は、前記光源部と前記受光部との間に配置されていることが好ましい。
これにより、透過型のエンコーダーを実現することができる。
前記位相差板の少なくとも一部は、前記光源部と前記受光部との間に配置されていることが好ましい。
これにより、透過型のエンコーダーを実現することができる。
本発明のエンコーダーでは、前記光源部が出射する前記光は、直線偏光しており、
前記受光部は、前記位相差板からの前記光の偏光状態に応じた信号を出力することが好ましい。
前記受光部は、前記位相差板からの前記光の偏光状態に応じた信号を出力することが好ましい。
これにより、位相差板からの光の偏光状態を光学スケールの回動状態に応じて変化させることができる。そして、受光部の出力信号を光学スケールの回動状態に応じて変化させることができる。
本発明のエンコーダーでは、前記光源部は、面発光レーザーを有することが好ましい。
これにより、光源部の小型化を図りつつ、直線偏光した光を出射する光源部を実現することができる。また、面発光レーザーからの光の指向性が極めて高いため、受光部でのクロストークを低減することができ、その結果、検出精度を向上させることができる。また、面発光レーザーからの光の波長域が極めて狭いため、位相差板等の光学部品の波長依存性による検出精度の低下を低減することもできる。
これにより、光源部の小型化を図りつつ、直線偏光した光を出射する光源部を実現することができる。また、面発光レーザーからの光の指向性が極めて高いため、受光部でのクロストークを低減することができ、その結果、検出精度を向上させることができる。また、面発光レーザーからの光の波長域が極めて狭いため、位相差板等の光学部品の波長依存性による検出精度の低下を低減することもできる。
本発明のエンコーダーでは、前記光源部は、発光ダイオードと、前記発光ダイオードと前記位相差板との間に少なくとも一部が配置されている偏光板と、を有することが好ましい。
これにより、比較的簡単かつ安価な構成で、直線偏光した光を安定して出射する長寿命な光源部を実現することができる。
本発明のエンコーダーでは、前記受光部は、受光素子と、前記受光素子と前記位相差板との間に少なくとも一部が配置されている偏光板と、を有することが好ましい。
これにより、比較的簡単な構成で、位相差板からの光の偏光状態に応じた信号を出力する受光部を実現することができる。
本発明のエンコーダーでは、前記光学スケールは、前記光学スケールの中心軸まわりの周方向に沿って設けられ、前記周方向での90°ごとに異なる識別パターンを有することが好ましい。
これにより、アブソリュート型のエンコーダーを実現することができる。
これにより、アブソリュート型のエンコーダーを実現することができる。
本発明のロボットは、本発明のエンコーダーを備えることを特徴とする。
このようなロボットによれば、エンコーダーの低コスト化を図ることで、ロボットの低コスト化を図ることができる。
このようなロボットによれば、エンコーダーの低コスト化を図ることで、ロボットの低コスト化を図ることができる。
本発明のプリンターは、本発明のエンコーダーを備えることを特徴とする。
このようなプリンターによれば、エンコーダーの低コスト化を図ることで、プリンターの低コスト化を図ることができる。
このようなプリンターによれば、エンコーダーの低コスト化を図ることで、プリンターの低コスト化を図ることができる。
以下、本発明のエンコーダー、ロボットおよびプリンターを添付図面に示す好適な実施形態に基づいて詳細に説明する。
1.エンコーダー
<第1実施形態>
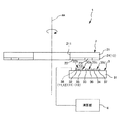
図1は、本発明の第1実施形態に係るエンコーダーを説明する模式図である。図2は、図1に示すエンコーダーが備える光学スケールを説明する平面図である。図3は、図1に示すエンコーダーが備える光源部(第1光源部)および受光部(第1受光部)を説明するための模式的断面図である。
<第1実施形態>
図1は、本発明の第1実施形態に係るエンコーダーを説明する模式図である。図2は、図1に示すエンコーダーが備える光学スケールを説明する平面図である。図3は、図1に示すエンコーダーが備える光源部(第1光源部)および受光部(第1受光部)を説明するための模式的断面図である。
図1に示すエンコーダー1は、反射型の光学式ロータリーエンコーダーである。本実施形態では、エンコーダー1は、アブソリュートエンコーダーである。このエンコーダー1は、図1に示すように、回動軸axまわりに回動する光学スケール2と、光学スケール2に対向して固定設置されるセンサーユニット3と、センサーユニット3に電気的に接続されている演算部4と、を備えている。
光学スケール2は、反射板21と、反射板21の一方の面(図1中下面)上に設けられている位相差板22、第1トラック23および第2トラック24と、を有する。ここで、第1トラック23および第2トラック24が光学スケール2の周方向での90°ごとに異なる識別パターンを有する90°判別パターン13を構成している。なお、エンコーダー1をインクリメンタルエンコーダーとして用いる場合、第1トラック23および第2トラック24を省略することができる。
センサーユニット3は、基板31と、基板31の光学スケール2側の面上に設けられている4つのセンサー部30a、30b、30c、30dを有する。ここで、センサー部30a、30bは、それぞれ、発光素子32、受光素子35および偏光板38を有し、発光素子32および偏光板38が、光を光学スケール2の位相差板22に照射する光を出射する「光源部11(第1光源部)」を構成し、受光素子35および偏光板38が、位相差板22からの光を受光する「受光部12(第1受光部)」を構成している。センサー部30cは、発光素子33および受光素子36を有し、発光素子33が第1トラック23に照射する光を出射する「第2光源部」を構成し、受光素子36が第1トラック23からの光を受光する「第2受光部」を構成している。センサー部30dは、発光素子34および受光素子37を有し、発光素子34が第2トラック24に照射する光を出射する「第3光源部」を構成し、受光素子37が第2トラック24からの光を受光する「第3受光部」を構成している。
演算部4は、センサー部30a、30bが有する受光素子35からの信号(A相信号、B相信号)、センサー部30cが有する受光素子36からの信号(第1トラック信号)、および、センサー部30dが有する受光素子37からの信号(第2トラック信号)に基づいて、光学スケール2の回動状態(回動角度、回動速度、回動方向等)を判断する。
以下、エンコーダー1の各部について詳述する。
(光学スケール)
図2に示す光学スケール2は、前述したように、反射板21と、反射板21の一方の面(図1中下面)上に設けられている位相差板22、第1トラック23および第2トラック24と、を有する。
(光学スケール)
図2に示す光学スケール2は、前述したように、反射板21と、反射板21の一方の面(図1中下面)上に設けられている位相差板22、第1トラック23および第2トラック24と、を有する。
反射板21(基板)は、図2に示すように、円板状をなし、その中央部には、厚さ方向に貫通している孔211が設けられている。この孔211は、例えば、回動軸axまわりに回動する部材(図示せず)への取り付けに用いることができる。なお、反射板21の平面視での外形は、円形に限定されず、任意である。
反射板21は、発光素子32、33、34からの光に対する反射性を有する。反射板21の構成材料としては、特に限定されず、例えば、金属材料、半導体材料、ガラス材料、樹脂材料等が挙げられる。なお、反射板21は、互いに異なる2種以上の材料を組み合わせて構成されていてもよく、例えば、位相差板22が設けられている部分の構成材料と、第1トラック23が設けられている部分の構成材料と、第2トラック24が設けられている部分の構成材料とのうちの少なくとも2つが互いに異なっていてもよい。また、反射板21の位相差板22、第1トラック23および第2トラック24が設けられている側の面が光の反射性を有すればよく、他の面が光の反射性を有していなくてもよい。
このような反射板21の一方の面上には、反射板21の中心側から外周側に向けて、位相差板22、第1トラック23および第2トラック24がこの順に並んで配置されている。
位相差板22は、板状またはフィルム状をなし、反射板21の一方の面に光学接着剤等により接合されている。位相差板22は、直交する2つの偏光成分に1/4波長分の位相差(光路差)を生じさせる光学素子、すなわち、λ/4板である。この位相差板22の構成材料としては、特に限定されず、例えば、水晶、MgF2結晶、複屈折ポリマー等の複屈折材料が挙げられる。また、位相差板22は、公知の位相差板と同様に製造することが可能である。なお、位相差板22が生じさせる位相差は、(2n+1)×λ/4であればよい。ただし、nは、0以上の整数である。また、位相差板22は、このような位相差を生じさせるように複数枚の位相差板を組み合わせて構成してもよい。
第1トラック23は、回動軸axを中心とする円周に沿って設けられ、回動軸axに沿った方向から見たとき(以下、「平面視」とも言う)、回動軸axを通り互いに直交する線分L1、L2により分割された4つの領域のうちの互いに対向する2つ(図2中右上側および左下側)の領域231と、残りの互いに対向する2つ(図2中右下側および左上側)の領域232とで構成されている。
領域231および領域232は、光の反射率が互いに異なる。具体的には、領域231は、発光素子33からの光を吸収するように構成され、領域232は、発光素子33からの光を反射させるように構成されている。したがって、発光素子33からの光に対する領域232の反射率は、発光素子33からの光に対する領域231の反射率よりも高い。
例えば、各領域231には、発光素子33からの光に対する反射防止性を有する薄膜が設けられ、一方、各領域232には、当該薄膜が設けられていない。当該薄膜としては、発光素子33からの光に対する反射防止性または吸収性を有すればよく、特に限定されないが、例えば、黒色の塗膜、誘電体多層膜等が挙げられる。また、当該薄膜は、公知の成膜法を用いて形成することができる。なお、領域231および領域232の光の反射率が互いに異なればよく、例えば、領域231および領域232のうちの一方の領域において光を透過するように反射板21に処理(または加工)を施し、他方の領域において光を反射するように当該処理(または当該加工)を施さないようにしてもよい。
第2トラック24は、回動軸axを中心とする円周に沿って設けられ、平面視で、前述した回動軸axを通る線分L1により分割された2つの領域のうちの一方(図2中下側)の領域241と、他方(図2中上側)の領域242とで構成されている。ここで、領域241、242と前述した第1トラック23の領域231、232との組み合わせは、光学スケール2の周方向での90°ごとに異なる「識別パターン」である90°判別パターン13となっている。
領域241および領域242は、前述した第1トラック23の領域231、232と同様、光の反射率が互いに異なる。具体的には、領域241は、発光素子34からの光を吸収するように構成され、他方の領域242は、発光素子34からの光を反射させるように構成されている。したがって、発光素子34からの光に対する領域242の反射率は、発光素子34からの光に対する領域241の反射率よりも高い。
また、領域241、242は、前述した第1トラック23の領域231、232と同様、薄膜の有無等によって形成することができる。また、第2トラック24は、前述した第1トラック23と一括して形成することができる。
(センサーユニット)
図1に示すセンサーユニット3は、前述したように、基板31と、基板31の光学スケール2側の面上に設けられているセンサー部30a、30b、30c、30dと、を有する。
図1に示すセンサーユニット3は、前述したように、基板31と、基板31の光学スケール2側の面上に設けられているセンサー部30a、30b、30c、30dと、を有する。
基板31は、回動軸axまわりに回動しない部材(図示せず)に取り付けられる。基板31は、例えば、配線基板であり、センサー部30a、30b、30c、30dを支持するとともに、これらと電気的に接続されている。そして、基板31は、図1に示す演算部4に図示しない配線を介して電気的に接続されている。
センサー部30a、30bは、図2に示すように、平面視で、回動軸axを中心とする同一円周上に回動軸axまわりに互いに角度β(例えばβ=22.5°)ずれた位置に配置されている。また、センサー部30a、30c、30dは、平面視で、光学スケール2の中心側から外周側に向かって半径方向に沿ってこの順で並んで配置されている。なお、センサー部30a、30b、30c、30dの配置は、光学スケール2の回動状態を検出可能であれば、図示の配置に限定されない。
図1に示すセンサー部30a、30bは、それぞれ、発光素子32、受光素子35および偏光板38を有し、図3に示すように、発光素子32が偏光板38を介して光学スケール2の位相差板22へ光LLを照射し、光学スケール2で反射した光LLを受光素子35が偏光板38を介して受光する。ここで、光源部11を構成している発光素子32および偏光板38は、直線偏光の光を位相差板22に向けて出射するように構成されている。また、受光部12を構成している受光素子35および偏光板38は、位相差板22からの光の偏光状態に応じた信号を出力するように構成されている。
発光素子32は、例えば、発光ダイオードであり、自然光または部分偏光の光を出射する。なお、「自然光」とは、電場の振動方向が任意の方向に一様に分布し、時間に対して不規則な振動をしている光を言う。また、「部分偏光」とは、電場の振動方向の分布が不一致で、特定方向に振動する電場の強度が他の方向より強い光を言う。また、発光素子32が出射する光は、後述する偏光板38の偏光軸方向(透過軸方向)に沿った振動方向成分を含む光であればよく、当該振動方向成分が一定であることが好ましい。また、発光素子32は、発光ダイオードに限定されず、半導体レーザーであってもよい。
受光素子35は、例えば、GaAsまたはSiを用いたフォトダイオードであり、受光強度に応じた電流を検出信号として出力する機能を有する。
偏光板38は、平面視で発光素子32および受光素子35の双方に重なって配置されている。また、偏光板38は、例えば、光学接着剤等により発光素子32および受光素子35の双方に接合され、発光素子32および受光素子35と一体化されている。なお、偏光板38は、光源部11の一部を構成しているとともに、受光部12の一部を構成しているが、光源部11の一部を構成する偏光板と、受光部12の一部を構成する偏光板とに分割されていてもよい。
偏光板38は、選択的にP偏光の光を透過し、S偏光の光を反射する偏光特性を有する。本実施形態では、センサー部30aが有する偏光板38の偏光軸の方向は、センサー部30bが有する偏光板38の偏光軸の方向と平行である。偏光板38としては、特に限定されないが、例えば、ガラス材料または樹脂材料で構成された板上に、アルミニウム(Al)、銅(Cu)、クロム(Cr)、金(Au)、鉄(Fe)、白金(Pt)またはこれらの合金等の金属材料でワイヤーグリッドを形成した偏光板、金属板に貫通したスリットを入れた偏光板、ヨウ素または二色性色素を用いた有機系の偏光板等が挙げられる。なお、センサー部30a、30bを平面視で光学スケール2の中心側から外周側に向かって半径方向に沿って並べた場合、センサー部30aが有する偏光板38の偏光軸の方向は、センサー部30bが有する偏光板38の偏光軸の方向に対して22.5°傾斜させればよい。
一方、図1に示すセンサー部30cは、発光素子33および受光素子36を有し、発光素子33が光学スケール2の第1トラック23に光を照射し、光学スケール2で反射した当該光を受光素子36が受光する。また、センサー部30dは、発光素子34および受光素子37を有し、発光素子34が光学スケール2の第2トラック24に光を照射し、光学スケール2で反射した当該光を受光素子37が受光する。
発光素子33、34は、それぞれ、例えば、面発光レーザー(半導体レーザー)または発光ダイオードであり、出射する光は偏光されていてもいなくてもよい。
受光素子36、37は、それぞれ、前述した受光素子35と同様、例えば、GaAsまたはSiを用いたフォトダイオードであり、受光強度に応じた電流を検出信号として出力する機能を有する。
(演算部)
図1に示す演算部4は、例えば、CPU(Central Processing Unit)およびSRAM(Static Random Access Memory)を含んで構成され、受光素子35、36、37からの信号を用いて、光学スケール2の回動状態を判断する機能を有する。この回動状態としては、例えば、回動位置、回動角度、回動速度、回動方向等が挙げられる。
図1に示す演算部4は、例えば、CPU(Central Processing Unit)およびSRAM(Static Random Access Memory)を含んで構成され、受光素子35、36、37からの信号を用いて、光学スケール2の回動状態を判断する機能を有する。この回動状態としては、例えば、回動位置、回動角度、回動速度、回動方向等が挙げられる。
以上、エンコーダー1の構成を説明した。以下、エンコーダー1の作用を説明する。
図4は、位相差板の遅相軸が光源部からの直線偏光の方向に平行であるときに受光部が受光する光の偏光状態を説明するための概念図である。図5は、位相差板の遅相軸が光源部からの直線偏光の方向に対して22.5°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図6は、位相差板の遅相軸が光源部からの直線偏光の方向に対して45°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図7は、位相差板の遅相軸が光源部からの直線偏光の方向に対して90°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図8は、位相差板の遅相軸が光源部からの直線偏光の方向に対して135°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図9は、位相差板の遅相軸が光源部からの直線偏光の方向に対して180°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図10は、図1に示すエンコーダーの光学スケールの回動角度と第1受光部である受光部12(PD1)、第2受光部である受光素子36(PD2)および第3受光部である受光素子37(PD3)の出力(電流値)との関係を示すグラフである。
図4は、位相差板の遅相軸が光源部からの直線偏光の方向に平行であるときに受光部が受光する光の偏光状態を説明するための概念図である。図5は、位相差板の遅相軸が光源部からの直線偏光の方向に対して22.5°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図6は、位相差板の遅相軸が光源部からの直線偏光の方向に対して45°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図7は、位相差板の遅相軸が光源部からの直線偏光の方向に対して90°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図8は、位相差板の遅相軸が光源部からの直線偏光の方向に対して135°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図9は、位相差板の遅相軸が光源部からの直線偏光の方向に対して180°傾斜したときに受光部が受光する光の偏光状態を説明するための概念図である。図10は、図1に示すエンコーダーの光学スケールの回動角度と第1受光部である受光部12(PD1)、第2受光部である受光素子36(PD2)および第3受光部である受光素子37(PD3)の出力(電流値)との関係を示すグラフである。
図4に示すように、発光素子32から出射された自然光または部分偏光である光LL1は、偏光板38に入射し、偏光板38の偏光軸方向P(透過軸方向)に沿った方向成分のみが偏光板38を透過する。これにより、偏光板38から偏光軸方向Pに沿った方向の直線偏光の光LL2が位相差板22に向けて出射される。この直線偏光の光LL2は、位相差板22の遅相軸Nxの向きに応じた偏光状態の光LL3として位相差板22から出射される。この光LL3は、反射板21で位相差板22に向けて反射されて光LL4となる。この光LL4は、位相差板22の遅相軸Nxの向きに応じた偏光状態の光LL5として位相差板22から出射される。この光LL5は、偏光板38に入射し、偏光板38の偏光軸方向Pに沿った方向成分のみが偏光板38を透過する。これにより、偏光板38から偏光軸方向Pに沿った方向の直線偏光の光LL6が受光素子35で受光される。
図4は、位相差板22の遅相軸Nxが光LL2の直線偏光の方向(電場の振動方向)に平行となる状態を図示しており、この状態では、光LL3、LL4、LL5、LL6は、いずれも、光LL2と同じ方向の直線偏光となる。ここで、光LL5は、偏光板38でほとんど吸収されることなく、偏光板38を透過して光LL6となる。なお、位相差板22の光の進む速度が速い(屈折率が最小となる)方位を「進相軸Ny」と言い、反対に遅い(屈折率が最大となる)方位を「遅相軸Nx」と言う。
図5に示すように、位相差板22の遅相軸Nxが光LL2の直線偏光の方向に対して22.5°傾斜(回転)した状態では、光LL3は、位相差板22の遅相軸Nxに沿った方向を長軸とする楕円偏光となる。また、光LL4は、光LL3とは逆回りの楕円偏光となる。そのため、光LL5は、光LL2の直線偏光の方向に対して45°回転した方向の直線偏光となる。したがって、光LL5の偏光軸方向Pに沿った方向以外の方向成分が偏光板38に吸収されることにより、光LL6の光量は、光LL5の光量の半分となる。
図6に示すように、位相差板22の遅相軸Nxが光LL2の直線偏光の方向に対して45°傾斜(回転)した状態では、光LL3は、円偏光となる。また、光LL4は、光LL3とは逆回りの円偏光となる。そのため、光LL5は、遅相軸Nxに対して線対称となる振動方向の直線偏光、すなわち、光LL2の直線偏光の方向に対して90°回転した方向の直線偏光となる。したがって、光LL5の偏光軸方向Pに沿った方向以外の方向成分(すなわち全て)が偏光板38に吸収されることにより、光LL6の光量は、ゼロとなる。
図7に示すように、位相差板22の遅相軸Nxが光LL2の直線偏光の方向に対して90°傾斜(回転)した状態では、前述した図4に示す場合と同様、光LL5は、偏光板38でほとんど吸収されることなく、偏光板38を透過して光LL6となる。
図8に示すように、位相差板22の遅相軸Nxが光LL2の直線偏光の方向に対して135°傾斜(回転)した状態では、前述した図6に示す場合と同様、光LL5は、光LL2の直線偏光の方向に対して90°回転した方向の直線偏光となり、光LL6の光量は、ゼロとなる。
図9に示すように、位相差板22の遅相軸Nxが光LL2の直線偏光の方向に対して180°傾斜(回転)した状態では、前述した図4に示す場合と同様、光LL5は、偏光板38でほとんど吸収されることなく、偏光板38を透過して光LL6となる。
以上のように、光LL2の直線偏光の方向に対する位相差板22の遅相軸Nxの傾斜角度に応じて、光LL6の光量が周期的に変化する。ここで、光LL2の直線偏光の方向に対する位相差板22の遅相軸Nxの傾斜角度は、光学スケール2の回動角度に対応している。したがって、図10中のAで示すように、受光素子35の出力(PD1)は、光学スケール2の回動角度に応じて正弦波的に変化する。また、図示しないが、センサー部30aが有する受光素子35の出力は、センサー部30bが有する受光素子35の出力に対して位相が22.5°ずれる。したがって、これらの出力の一方をA相信号、他方をB相信号として用いることで、光学スケール2の回動角度が0°〜90°となる範囲、90°〜180°となる範囲、180°〜270°となる範囲、270°〜360°となる範囲のそれぞれの範囲内での回動角度の判別が容易となる。
ここで、受光素子35の出力は、光学スケール2の回動角度が0°〜90°となる範囲、90°〜180°となる範囲、180°〜270°となる範囲、270°〜360°となる範囲で互いに同じ波形となる。そのため、受光素子35からの信号のみでは、光学スケール2の回動角度がこれらの範囲のいずれにあるのかを区別することができない。
そこで、受光素子36、37からの信号を用いて、光学スケール2の回動角度が0°〜90°となる範囲、90°〜180°となる範囲、180°〜270°となる範囲、270°〜360°となる範囲のうちのいずれの範囲にあるのかの判断を行う。
具体的に説明すると、前述したように、第1トラック23の領域231および領域232は互いに反射率が異なるため、図10中のBで示すように、受光素子36の出力(PD2)は、二値的に変化する。ここで、受光素子36の出力は、0°〜90°、180°〜270°の範囲と、90°〜180°、270°〜360°の範囲とで互いに異なる値となる。
また、前述したように、第2トラック24の領域241および領域242は互いに反射率が異なるため、図10中のCで示すように、受光素子37の出力(PD3)は、二値的に変化する。ここで、受光素子37の出力は、0°〜180°の範囲と、180°〜360°の範囲とで互いに異なる値となる。
このような受光素子36、37の出力結果を組み合わせると、0°〜90°の範囲と、180°〜270°の範囲と、90°〜180°の範囲と、270°〜360°の範囲とのうち、いずれの範囲であるかの判別を行うことができる。
以上のように、エンコーダー1は、位相差板22を有する光学スケール2と、位相差板22に照射する光LLを出射する光源部11と、位相差板22からの光LLを受光し、その受光強度に応じた信号を出力する受光部12と、を備える。
このようなエンコーダー1によれば、位相差板22からの光LLの偏光状態が光学スケール2の回動状態に応じて変化するため、受光部12の受光結果を用いて、光学スケール2の回動状態を検出することができる。したがって、光学スケール2に偏光板を用いることなく、光学スケール2の回動状態を検出することができる。また、位相差板22の製造コストは比較的安価であるため、エンコーダー1の低コスト化を図ることができる。
ここで、光源部11が出射する光LLは、直線偏光しており、受光部12は、位相差板22からの光LLの偏光状態(具体的には直線偏光の方向)に応じた信号を出力する。これにより、位相差板22からの光LLの偏光状態を光学スケール2の回動状態に応じて変化させることができる。そして、受光部12の出力信号を光学スケール2の回動状態に応じて変化させることができる。
本実施形態では、位相差板22は、λ/4板であり、光学スケール2は、位相差板22に対して光源部11とは反対側に配置されている光反射性の反射板21を有する。これにより、反射型のエンコーダー1を実現することができる。
また、光源部11は、発光ダイオードである発光素子32と、発光素子32と位相差板22との間に少なくとも一部が配置されている偏光板38と、を有する。これにより、比較的簡単かつ安価な構成で、直線偏光した光(光LL2)を安定して出射する長寿命な光源部11を実現することができる。
さらに、受光部12は、受光素子35と、受光素子35と位相差板22との間に少なくとも一部が配置されている偏光板38と、を有する。これにより、比較的簡単な構成で、位相差板22からの光(光LL5)の偏光状態(具体的には直線偏光の方向)に応じた信号を出力する受光部12を実現することができる。
また、光学スケール2は、光学スケール2の中心軸(回動軸ax)まわりの周方向に沿って設けられ、その周方向での90°ごとに異なる識別パターンである領域231、232、241、242を有する90°判別パターン13を有する。これにより、アブソリュート型のエンコーダー1を実現することができる。
<第2実施形態>
図11は、本発明の第2実施形態に係るエンコーダーが備える光源部(第1光源部)および受光部(第1受光部)を説明するための模式的断面図である。
図11は、本発明の第2実施形態に係るエンコーダーが備える光源部(第1光源部)および受光部(第1受光部)を説明するための模式的断面図である。
以下、第2実施形態について説明するが、前述した実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。なお、図11において、前述した実施形態と同様の構成については、同一符号を付している。
本実施形態は、光源部の構成が異なる以外は、前述した第1実施形態と同様である。
本実施形態は、光源部の構成が異なる以外は、前述した第1実施形態と同様である。
図11に示すエンコーダー1Aが備えるセンサーユニット3Aは、前述した第1実施形態のセンサーユニット3の発光素子32および偏光板38に代えて、発光素子32Aおよび偏光板38Aを備える。このセンサーユニット3Aでは、発光素子32Aが光学スケール2の位相差板22へ光LLを照射し、光学スケール2で反射した光LLを受光素子35が偏光板38Aを介して受光する。ここで、発光素子32Aは、位相差板22に照射する光LLを出射する「光源部11A」を構成している。また、受光素子35および偏光板38Aは、位相差板22からの光LLを受光する「受光部12A」を構成している。
発光素子32Aは、例えば、面発光レーザー(VCSEL:Vertical Cavity Surface Emitting Laser)である。この発光素子32Aは、所定方向(前述した第1実施形態の偏光板38の偏光軸方向に対応する方向)に直線偏光された光LLを出射する機能を有する。発光素子32Aとしては、特に限定されないが、例えば、AlGaAs系、GaInP系、ZnSSe系、InGaN系、AlGaN系、InGaAs系、GaInNAs系、GaAsSb系の半導体材料を用いた面発光レーザーが挙げられる。
なお、発光素子32Aが出射する光LLは、直線偏光成分以外の成分が含まれていたり、直線偏光の方向が変動したりしてもよいが、その場合、直線偏光成分以外の成分および直線偏光の方向の変動のそれぞれができるだけ少ないこと(所望の直線偏光成分に対する他の成分量および直線偏光の方向の変動角度のそれぞれが5%以下とすること)が好ましい。
このように、光源部11Aは、面発光レーザーである発光素子32Aを有する。これにより、光源部11Aの小型化を図りつつ、直線偏光した光LLを出射する光源部11Aを実現することができる。また、面発光レーザーである発光素子32Aからの光LLの指向性が極めて高いため、受光部12Aでのクロストークを低減することができ、その結果、検出精度を向上させることができる。また、面発光レーザーである発光素子32Aからの光LLの波長域が極めて狭いため、位相差板22等の光学部品の波長依存性による検出精度の低下を低減することもできる。
偏光板38Aは、平面視で発光素子32Aに重ならずに受光素子35のみに重なって配置されている。また、偏光板38Aは、例えば、光学接着剤等により受光素子35に接合され、受光素子35と一体化されている。
以上説明したような第2実施形態のエンコーダー1Aによっても、前述した第1実施形態と同様の作用効果を奏し、低コスト化を図ることができる。
<第3実施形態>
図12は、本発明の第3実施形態に係るエンコーダーが備える光源部(第1光源部)および受光部(第1受光部)を説明するための模式的断面図である。
図12は、本発明の第3実施形態に係るエンコーダーが備える光源部(第1光源部)および受光部(第1受光部)を説明するための模式的断面図である。
以下、第3実施形態について説明するが、前述した実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。なお、図12において、前述した実施形態と同様の構成については、同一符号を付している。
本実施形態は、光学スケールの構成および受光部の配置が異なる以外は、前述した第1実施形態と同様である。
図12に示すエンコーダー1Bは、前述した第1実施形態の光学スケール2およびセンサーユニット3に代えて、光学スケール2Bおよびセンサーユニット3Bを備える。
光学スケール2Bは、前述した第1実施形態の反射板21および位相差板22に代えて、透光板21Bおよび位相差板22Bを有する。透光板21B(基板)は、発光素子32からの光に対する透過性を有する。透光板21Bの構成材料としては、特に限定されず、例えば、ガラス材料、樹脂材料等が挙げられるが、複屈折性を有しない材料が好ましい。位相差板22Bは、λ/2板である。
なお、位相差板22Bは、透光板21Bに対して受光部12A側に配置されていてもよい。また、位相差板22Bが生じさせる位相差は、(2n+1)×λ/2であればよい。ただし、nは、0以上の整数である。また、位相差板22Bは、このような位相差を生じさせるように複数枚の位相差板で構成してもよい。例えば、位相差板22Bに代えて、前述した第1実施形態の位相差板22を2枚組み合わせて用いてもよく、この場合、2枚の位相差板22を透光板21Bに対して一方側に配置してもよいし、透光板21Bを挟むように配置してもよい。また、位相差板22Bが十分な剛性を有する場合には、透光板21Bを省略してもよい。また、位相差板22Bは、透光板21Bと一体形成されていてもよい。
センサーユニット3Bは、光学スケール2Bに対して一方側(図12中の下側)に配置されている基板31aと、基板31aの光学スケール2B側の面上に設けられている光源部11Bと、光学スケール2Bに対して他方側(図12中の上側)に配置されている基板31bと、基板31bの光学スケール2B側の面上に設けられている受光部12Aと、を有する。
基板31aは、配線基板であり、光源部11Bを支持するとともに、光源部11Bに電気的に接続されている。光源部11Bは、基板31a上に設けられている発光素子32と、発光素子32の基板31aとは反対側の面上に設けられている偏光板38Bと、を有し、発光素子32が偏光板38Bを介して光学スケール2Bの位相差板22Bへ光LLを照射する。
基板31bは、配線基板であり、受光部12Aを支持するとともに、受光部12Aに電気的に接続されている。受光部12Aは、基板31b上に設けられている受光素子35と、受光素子35の基板31bとは反対側の面上に設けられている偏光板38Aと、を有し、光学スケール2Bを透過した光LLを受光素子35が偏光板38Aを介して受光する。ここで、偏光板38Aの偏光軸は、前述した偏光板38Bの偏光軸と平行となるように配置されている。
このようなエンコーダー1Bでは、光学スケール2Bの位相差板22Bがλ/2板であるため、光LLが位相差板22Bを透過することで、前述したように第1実施形態の位相差板22を2回透過するのと同様の作用を生じさせる。なお、図示しないが、第1トラック23および第2トラック24のための光源部および受光部は、光源部11Bおよび受光部12Aと同様に、光学スケール2Bを挟むように配置してもよいし、前述した第1実施形態と同様に、光学スケール2Bに対して一方側(光源部11B側または受光部12A側)に配置してもよい。
このように、エンコーダー1Bにおいて、位相差板22Bは、λ/2板であり、位相差板22Bの少なくとも一部は、光源部11Bと受光部12Aとの間に位置している。これにより、透過型のエンコーダー1Bを実現することができる。
以上説明したような第3実施形態によっても、低コスト化を図ることができる。
以上説明したような第3実施形態によっても、低コスト化を図ることができる。
2.ロボット
図13は、本発明のロボットの実施形態を示す側面図である。なお、以下では、説明の便宜上、図13中の上側を「上」、下側を「下」と言う。また、図13中の基台側を「基端側」、その反対側(エンドエフェクター側)を「先端側」と言う。また、図13の上下方向を「鉛直方向」とし、左右方向を「水平方向」とする。
図13は、本発明のロボットの実施形態を示す側面図である。なお、以下では、説明の便宜上、図13中の上側を「上」、下側を「下」と言う。また、図13中の基台側を「基端側」、その反対側(エンドエフェクター側)を「先端側」と言う。また、図13の上下方向を「鉛直方向」とし、左右方向を「水平方向」とする。
図13に示すロボット100は、いわゆる水平多関節ロボット(スカラロボット)であり、例えば、精密機器等を製造する製造工程等で用いられ、精密機器や部品等の把持や搬送等を行うことができる。
図13に示すように、ロボット100は、基台110と、第1アーム120と、第2アーム130と、作業ヘッド140と、エンドエフェクター150と、配線引き回し部160と、を有している。以下、ロボット100の各部を順次簡単に説明する。
基台110は、例えば、図示しない床面にボルト等によって固定されている。基台110の上端部には、第1アーム120が連結している。第1アーム120は、基台110に対して鉛直方向に沿う第1軸である回動軸J1まわりに回動可能となっている。
基台110内には、第1アーム120を回動させる駆動力を発生させる第1モーター111と、第1モーター111の駆動力を減速する第1減速機112とが設置されている。第1減速機112の入力軸は、第1モーター111の回転軸に連結され、第1減速機112の出力軸は、第1アーム120に連結されている。そのため、第1モーター111が駆動し、その駆動力が第1減速機112を介して第1アーム120に伝達されると、第1アーム120が基台110に対して回動軸J1まわりに水平面内で回動する。
また、基台110および第1アーム120には、基台110に対する第1アーム120の回動状態を検出する第1エンコーダーであるエンコーダー1が設けられている。具体的には、例えば、前述した光学スケール2が第1減速機112の出力軸または第1アーム120に取り付けられ、センサーユニット3が基台110またはこれに固定された部材に取り付けられている。
第1アーム120の先端部には、第2アーム130が連結している。第2アーム130は、第1アーム120に対して鉛直方向に沿う第2軸J2まわりに回動可能となっている。図示しないが、第2アーム130内には、第2アーム130を回動させる駆動力を発生させる第2モーターと、第2モーターの駆動力を減速する第2減速機とが設置されている。そして、第2モーターの駆動力が第2減速機を介して第2アーム130に伝達されることにより、第2アーム130が第1アーム120に対して第2軸J2まわりに水平面内で回動する。また、図示しないが、第2モーターには、第1アーム120に対する第2アーム130の回動状態を検出する第2エンコーダーが設けられている。
第2アーム130の先端部には、作業ヘッド140が配置されている。作業ヘッド140は、第2アーム130の先端部に同軸的に配置されたスプラインナットおよびボールネジナット(ともに図示せず)に挿通されたスプラインシャフト141を有している。スプラインシャフト141は、第2アーム130に対して、その軸まわりに回転可能であり、かつ、上下方向に移動(昇降)可能となっている。
図示しないが、第2アーム130内には、回転モーターおよび昇降モーターが配置されている。回転モーターの駆動力は、図示しない駆動力伝達機構によってスプラインナットに伝達され、スプラインナットが正逆回転すると、スプラインシャフト141が鉛直方向に沿う軸J3まわりに正逆回転する。また、図示しないが、回転モーターには、第2アーム130に対するスプラインシャフト141の回動状態を検出する第3エンコーダーが設けられている。
一方、昇降モーターの駆動力は、図示しない駆動力伝達機構によってボールネジナットに伝達され、ボールネジナットが正逆回転すると、スプラインシャフト141が上下に移動する。昇降モーターには、第2アーム130に対するスプラインシャフト141の移動量を検出する第4エンコーダーが設けられている。
スプラインシャフト141の先端部(下端部)には、エンドエフェクター150が連結されている。エンドエフェクター150としては、特に限定されず、例えば、被搬送物を把持するもの、被加工物を加工するもの等が挙げられる。
第2アーム130内に配置された各電子部品(例えば、第2モーター、回転モーター、昇降モーター、第2〜第4エンコーダー等)に接続される複数の配線は、第2アーム130と基台110とを連結する管状の配線引き回し部160内を通って基台110内まで引き回されている。さらに、かかる複数の配線は、基台110内でまとめられることによって、第1モーター111およびエンコーダー1に接続される配線とともに、基台110の外部に設置され、ロボット100を統括制御する図示しない制御装置まで引き回される。
以上のように、ロボット100は、エンコーダー1を備える。このようなロボット100によれば、エンコーダー1の低コスト化を図ることで、ロボット100の低コスト化を図ることができる。
3.プリンター
図14は、本発明のプリンターの実施形態を示す側面図である。
図14に示すプリンター1000は、ドラム状のプラテンを備えたラベル印刷装置である。このプリンター1000では、その両端が繰出軸1120および巻取軸1140に記録媒体としてのロール状に巻き付けられた紙系やフィルム系等の1枚のシートS(ウェブ)が、繰出軸1120と巻取軸1140の間に張架されており、シートSはこうして張架された搬送経路Scに沿って、繰出軸1120から巻取軸1140へと搬送される。そして、プリンター1000は、この搬送経路Scに沿って搬送されるシートSに対して機能液を吐出してシートS上に画像を記録(形成)するように構成されている。
図14は、本発明のプリンターの実施形態を示す側面図である。
図14に示すプリンター1000は、ドラム状のプラテンを備えたラベル印刷装置である。このプリンター1000では、その両端が繰出軸1120および巻取軸1140に記録媒体としてのロール状に巻き付けられた紙系やフィルム系等の1枚のシートS(ウェブ)が、繰出軸1120と巻取軸1140の間に張架されており、シートSはこうして張架された搬送経路Scに沿って、繰出軸1120から巻取軸1140へと搬送される。そして、プリンター1000は、この搬送経路Scに沿って搬送されるシートSに対して機能液を吐出してシートS上に画像を記録(形成)するように構成されている。
プリンター1000は、概略的な構成として、繰出軸1120からシートSを繰り出す繰出部1102と、繰出部1102から繰り出されたシートSに画像を記録するプロセス部1103と、プロセス部1103で画像の記録されたシートSを切り抜くレーザースキャナー装置1007と、シートSを巻取軸1140に巻き取る巻取部1104とを含み構成されている。
繰出部1102は、シートSの端を巻き付けた繰出軸1120と、繰出軸1120から引き出されたシートSを巻き掛ける従動ローラー1121と、を有する。
プロセス部1103は、繰出部1102から繰り出されたシートSを支持部としてのプラテンドラム1130で支持しつつ、プラテンドラム1130の外周面に沿って配置されたヘッドユニット1115に配置された記録ヘッド1151等により適宜処理を行わせ、シートSに画像を記録するものである。
プラテンドラム1130は、図示しない支持機構によりドラム軸1130sを中心にして回転自在に支持された円筒形状のドラムであり、繰出部1102から巻取部1104へと搬送されるシートSを裏面(記録面とは反対側の面)側から巻き掛けられる。このプラテンドラム1130は、シートSとの間の摩擦力を受けてシートSの搬送方向Dsに従動回転しつつ、周方向での範囲Raにわたって、シートSを裏面側から支持するものである。ここで、プロセス部1103では、プラテンドラム1130への巻き掛け部の両側でシートSを折り返す従動ローラー1133、1134が設けられている。また、繰出軸1120と従動ローラー1133との間には、従動ローラー1121、1131およびセンサーSeが設けられ、巻取軸1140と従動ローラー1134との間には、従動ローラー1132、1141が設けられている。
プロセス部1103は、ヘッドユニット1115を備え、ヘッドユニット1115には、イエロー、シアン、マゼンタおよびブラックに対応する4個の記録ヘッド1151が設けられている。各記録ヘッド1151は、プラテンドラム1130に巻き掛けられたシートSの表面に対して若干のクリアランス(プラテンギャップ)を空けて対向しており、対応する色の機能液をノズルからインクジェット方式で吐出する。そして、搬送方向Dsへ搬送されるシートSに対して各記録ヘッド1151が機能液を吐出することにより、シートSの表面にカラー画像が形成される。
ここで、機能液として、紫外線(光)を照射することで硬化するUV(ultraviolet)インク(光硬化性インク)を用いる。そのため、プロセス部1103のヘッドユニット1115には、UVインクを仮硬化させてシートSに定着させるために、複数の記録ヘッド1151の各間に第1UV光源1161(光照射部)が設けられている。また、複数の記録ヘッド1151(ヘッドユニット1115)に対して搬送方向Dsの下流側には、本硬化用の硬化部としての第2UV光源1162が設けられている。
レーザースキャナー装置1007は、画像の記録されたシートSを部分的に切り抜く、もしくは分断するように設けられている。レーザースキャナー装置1007のレーザー発振器1401によって発振されたレーザー光は、エンコーダー1を含む駆動装置1402、1406、1408によって位置または回転位置(角度)を制御された第1レンズ1403および第1ミラー1407や第2ミラー1409などを経由し、被加工物であるシートSに照射される。このように、シートSに照射されるレーザー光LAは、各駆動装置1402、1406、1408によって照射位置が制御され、シートS上の所望の位置に照射することができる。シートSは、レーザー光LAの照射された部分が溶断され、部分的に切り抜かれるか、もしくは分断される。
以上のように、プリンター1000は、エンコーダー1を備える。このようなプリンター1000によれば、エンコーダー1の低コスト化を図ることで、プリンター1000の低コスト化を図ることができる。
以上、本発明のエンコーダー、ロボットおよびプリンターを図示の好適な実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、他の任意の構成物が付加されていてもよい。
また、エンコーダーの設置箇所は、基台と第1アームとの関節部に限定されず、相対的に回動する任意の2つのアームの関節部であってもよい。また、エンコーダーの設置箇所は、ロボットが有する関節部に限定されない。
また、前述した実施形態では、ロボットアームの数は、1つであったが、ロボットアームの数は、これに限定されず、例えば、2つ以上でもよい。すなわち、本発明のロボットは、例えば、双腕ロボット等の複数腕ロボットであってもよい。
また、前述した実施形態では、ロボットアームが有するアームの数は、2つであったが、アームの数は、これに限定されず、1つまたは3つ以上であってもよい。
また、前述した実施形態では、本発明のロボットの設置箇所は、床面に限定されず、例えば、天井面や側壁面等でもよい。また、本発明のロボットは、建物等の構造物に固定設置されるものに限定されず、例えば、脚部を有する脚式歩行(走行)ロボットであってもよい。
また、前述した実施形態では、本発明のロボットの一例として、水平多関節ロボットを例に説明したが、本発明のロボットは、相対的に回動する2つの部材を有すれば、垂直多関節ロボット等の他の形式のロボットであってもよい。
また、本発明のエンコーダーは、前述したプリンターに限定されず、回転部を有する産業用プリンター、民生用プリンター等の各種プリンターに用いることができる。また、本発明のエンコーダーをプリンターに用いる場合、エンコーダーの設置箇所は、前述したものに限定されず、例えば、紙送り機構等に用いてもよい。
1…エンコーダー、1A…エンコーダー、1B…エンコーダー、2…光学スケール、2B…光学スケール、3…センサーユニット、3A…センサーユニット、3B…センサーユニット、4…演算部、11…光源部、11A…光源部、11B…光源部、12…受光部、12A…受光部、13…90°判別パターン、21…反射板、21B…透光板、22…位相差板、22B…位相差板、23…第1トラック、24…第2トラック、30a…センサー部、30b…センサー部、30c…センサー部、30d…センサー部、31…基板、31a…基板、31b…基板、32…発光素子、32A…発光素子、33…発光素子、34…発光素子、35…受光素子、36…受光素子、37…受光素子、38…偏光板、38A…偏光板、38B…偏光板、100…ロボット、110…基台、111…第1モーター、112…第1減速機、120…第1アーム、130…第2アーム、140…作業ヘッド、141…スプラインシャフト、150…エンドエフェクター、160…配線引き回し部、211…孔、231…領域、232…領域、241…領域、242…領域、1000…プリンター、1007…レーザースキャナー装置、1102…繰出部、1103…プロセス部、1104…巻取部、1115…ヘッドユニット、1120…繰出軸、1121…従動ローラー、1130…プラテンドラム、1130s…ドラム軸、1131…従動ローラー、1132…従動ローラー、1133…従動ローラー、1134…従動ローラー、1140…巻取軸、1141…従動ローラー、1151…記録ヘッド、1161…第1UV光源、1162…第2UV光源、1401…レーザー発振器、1402…駆動装置、1403…第1レンズ、1406…駆動装置、1407…第1ミラー、1408…駆動装置、1409…第2ミラー、Ds…搬送方向、J1…回動軸、J2…第2軸、J3…軸、L1…線分、L2…線分、LA…レーザー光、LL…光、LL1…光、LL2…光、LL3…光、LL4…光、LL5…光、LL6…光、Nx…遅相軸、Ny…進相軸、P…偏光軸方向、Ra…範囲、S…シート、Sc…搬送経路、Se…センサー、ax…回動軸
Claims (10)
- 位相差板を有する光学スケールと、
前記位相差板に照射する光を出射する光源部と、
前記位相差板からの前記光を受光し、その受光強度に応じた信号を出力する受光部と、を備えることを特徴とするエンコーダー。 - 前記位相差板は、λ/4板であり、
前記光学スケールは、前記位相差板に対して前記光源部とは反対側に配置されている光反射性を有する反射板を備える請求項1に記載のエンコーダー。 - 前記位相差板は、λ/2板であり、
前記位相差板の少なくとも一部は、前記光源部と前記受光部との間に配置されている請求項1に記載のエンコーダー。 - 前記光源部が出射する前記光は、直線偏光しており、
前記受光部は、前記位相差板からの前記光の偏光状態に応じた信号を出力する請求項1ないし3のいずれか1項に記載のエンコーダー。 - 前記光源部は、面発光レーザーを有する請求項4に記載のエンコーダー。
- 前記光源部は、発光ダイオードと、前記発光ダイオードと前記位相差板との間に少なくとも一部が配置されている偏光板と、を有する請求項4に記載のエンコーダー。
- 前記受光部は、受光素子と、前記受光素子と前記位相差板との間に少なくとも一部が配置されている偏光板と、を有する請求項4ないし6のいずれか1項に記載のエンコーダー。
- 前記光学スケールは、前記光学スケールの中心軸まわりの周方向に沿って設けられ、前記周方向での90°ごとに異なる識別パターンを有する請求項1ないし7のいずれか1項に記載のエンコーダー。
- 請求項1ないし8のいずれか1項に記載のエンコーダーを備えることを特徴とするロボット。
- 請求項1ないし8のいずれか1項に記載のエンコーダーを備えることを特徴とするプリンター。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016245139A JP2018100837A (ja) | 2016-12-19 | 2016-12-19 | エンコーダー、ロボットおよびプリンター |
| CN201711336147.8A CN108202326B (zh) | 2016-12-19 | 2017-12-14 | 编码器、机器人以及打印机 |
| US15/845,041 US10513289B2 (en) | 2016-12-19 | 2017-12-18 | Encoder, robot, and printer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016245139A JP2018100837A (ja) | 2016-12-19 | 2016-12-19 | エンコーダー、ロボットおよびプリンター |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018100837A true JP2018100837A (ja) | 2018-06-28 |
Family
ID=62556719
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016245139A Pending JP2018100837A (ja) | 2016-12-19 | 2016-12-19 | エンコーダー、ロボットおよびプリンター |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10513289B2 (ja) |
| JP (1) | JP2018100837A (ja) |
| CN (1) | CN108202326B (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3636208B1 (en) * | 2013-04-09 | 2022-03-02 | Biomet 3i, LLC | Method of using scan data of a dental implant |
| JP2018185210A (ja) * | 2017-04-25 | 2018-11-22 | セイコーエプソン株式会社 | エンコーダー、プリンターおよびロボット |
| JP2019066235A (ja) * | 2017-09-29 | 2019-04-25 | セイコーエプソン株式会社 | エンコーダー、プリンターおよびロボット |
| CN110296724A (zh) * | 2019-07-31 | 2019-10-01 | 烟台环球数控科技有限公司 | 一种偏振角度编码器 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3584959A (en) * | 1967-02-23 | 1971-06-15 | Teeg Research Inc | Shaft position encoders |
| US5424535A (en) * | 1993-04-29 | 1995-06-13 | The Boeing Company | Optical angle sensor using polarization techniques |
| US5602388A (en) * | 1994-09-09 | 1997-02-11 | Sony Corporation | Absolute and directional encoder using optical disk |
| JP4250894B2 (ja) * | 2001-12-28 | 2009-04-08 | 富士ゼロックス株式会社 | 光学式エンコーダ及びエンコーダ用スケール |
| CN100376926C (zh) * | 2003-06-30 | 2008-03-26 | 华南师范大学 | 位相调制偏振态的量子编码器和解码器及其应用 |
| US20060132523A1 (en) * | 2004-12-21 | 2006-06-22 | Tong Xie | 2 Dimensional laser-based optical printer encoder |
| EP2775270A4 (en) * | 2011-10-31 | 2015-08-26 | Nsk Ltd | OPTICAL SENSOR, METHOD FOR PRODUCING OPTICAL SENSORS, OPTICAL ENCODER, TORQUE SENSING DEVICE, AND POWER ASSISTED STEERING DEVICE |
| JP6369042B2 (ja) * | 2013-11-05 | 2018-08-08 | 日本精工株式会社 | 光学式エンコーダユニット及び光学式エンコーダ |
| CN105716637B (zh) * | 2016-03-10 | 2018-03-30 | 华中科技大学 | 一种光学编码器 |
-
2016
- 2016-12-19 JP JP2016245139A patent/JP2018100837A/ja active Pending
-
2017
- 2017-12-14 CN CN201711336147.8A patent/CN108202326B/zh active Active
- 2017-12-18 US US15/845,041 patent/US10513289B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN108202326B (zh) | 2022-08-02 |
| US10513289B2 (en) | 2019-12-24 |
| CN108202326A (zh) | 2018-06-26 |
| US20180170423A1 (en) | 2018-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10634522B2 (en) | Encoder, printer, and robot | |
| CN108202326B (zh) | 编码器、机器人以及打印机 | |
| CN102662236B (zh) | 一种利用双面振镜实现激光单向扫描的扫描装置 | |
| US11480426B2 (en) | Optical displacement sensing system | |
| US10648837B2 (en) | Encoder, printer, and robot | |
| US10139251B2 (en) | Power transmitting apparatus, robot, and printer | |
| JP2018072184A (ja) | エンコーダーおよびロボット | |
| US10184808B2 (en) | Encoder and robot having an optical scale with a polarizing portion | |
| WO2015166882A1 (ja) | 偏光状態変換素子 | |
| JP5998682B2 (ja) | エンコーダ、符号板、駆動装置、及びロボット装置 | |
| JP2020051891A (ja) | エンコーダー、プリンターおよびロボット | |
| JP2003161907A (ja) | レーザビーム径可変装置 | |
| JP2018072145A (ja) | エンコーダー、ロボットおよびプリンター | |
| TWI496651B (zh) | 檢測裝置與使用其之檢測方法 | |
| JP3204369B2 (ja) | 移動車の光学式誘導設備 | |
| JP2017198492A (ja) | 光学スケール、エンコーダーおよびロボット | |
| JP2018036125A (ja) | エンコーダーおよびロボット | |
| JP2017198652A (ja) | エンコーダーおよびロボット | |
| JPH076811B2 (ja) | 変位測定装置 | |
| JP2011002540A (ja) | ビーム分岐装置、レーザ加工装置、及びビーム分岐方法 | |
| JPH04168411A (ja) | 光偏向器 | |
| JPH07332922A (ja) | 高速追尾式レーザ干渉測長器 | |
| JP2019168705A (ja) | 基板処理装置、及びデバイス製造方法 | |
| JP2018072008A (ja) | 位置検出装置、エンコーダー、およびロボット | |
| JPH0387615A (ja) | ロータリエンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180910 |