JP2018192066A - 開骨器具 - Google Patents
開骨器具 Download PDFInfo
- Publication number
- JP2018192066A JP2018192066A JP2017099292A JP2017099292A JP2018192066A JP 2018192066 A JP2018192066 A JP 2018192066A JP 2017099292 A JP2017099292 A JP 2017099292A JP 2017099292 A JP2017099292 A JP 2017099292A JP 2018192066 A JP2018192066 A JP 2018192066A
- Authority
- JP
- Japan
- Prior art keywords
- blade
- long
- bodies
- rotation angle
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Surgical Instruments (AREA)
Abstract
Description
(1) 先端部同士が回動可能に連結された一対の第1の長尺体を有する第1のブレードと、
前記第1のブレードに並設され、先端部同士が回動可能に連結された一対の第2の長尺体を有する第2のブレードと、
前記各第1の長尺体と前記各第2の長尺体とに着脱自在に装着され、その装着状態で、前記第1のブレードと前記第2のブレードとを並設させて連結するとともに、前記第1の長尺体同士の回動角度と、前記第2の長尺体同士の回動角度とを調整する角度調整機構とを備えることを特徴とする開骨器具。
前記装着状態で前記一対の第1の長尺体のうちの他方の第1の長尺体と、前記一対の第2の長尺体のうちの、前記他方の第1の長尺体と同じ側に位置する他方の第2の長尺体とに係合する第2の係合部材と、
前記第1の係合部材と前記第2の係合部材とに螺合するネジ部材とを有し、
前記ネジ部材を回転操作することにより、その回転方向に応じて、前記第1の係合部材と前記第2の係合部材とを接近または離間させ得るよう構成されている上記(1)に記載の開骨器具。
これにより、ボールプランジャを用いて、ロック部を簡単な構成のものとすることができ、よって、角度調整機構の着脱操作が容易となる。
これにより、回動角度(開大角)を正確に把握することができる。
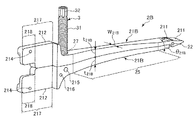
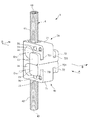
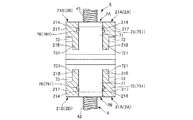
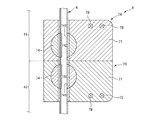
図1〜図3は、それぞれ、本発明の開骨器具の使用状態を示す斜視図である。図4は、本発明の開骨器具が備える第1のブレードを示す斜視図である。図5は、本発明の開骨器具が備える第2のブレードを示す斜視図である。図6は、本発明の開骨器具が備える角度調整機構を示す斜視図である。図7は、図6中の矢印A方向から角度調整機構の装着状態を見た部分横断面図である。図8は、図6中のB−B線断面図である。図9は、本発明の開骨器具が備える目盛り部材を示す斜視図である。図10は、本発明の開骨器具を用いて開大部に留置される人工骨の一例を示す斜視図である。なお、以下では、説明の都合上、図1〜図6、図8〜図10中の手元側を「基端(または後)」、その反対側を「先端(または前)」と言う。また、図1〜図10中の上側を「上(または上方)」、下側を「下(または下方)」と言う。
2A 第1のブレード
2B 第2のブレード
21A 第1の長尺体
21B 第2の長尺体
211 先端部
212 基端部
214 凹部
215 大径貫通孔
216 小径貫通孔
217 第1の薄肉部
218 第2の薄肉部
22 連結部
25 窪み
27 雌ネジ
3 角度維持部材
31 雄ネジ
32 把持部
4 角度調整部材(ネジ部材)
41、42 雄ネジ
43 凹部
5 角度調整機構
6 目盛り部材
61 目盛り板
611 角度目盛り
62 大径ピン状部
63 小径ピン状部
64 把持部
7A 第1の係合部材
7B 第2の係合部材
71 本体部
72 爪部
721 溝
73 爪部
731 溝
74 雌ネジ部材
741 貫通孔
742、743 雌ネジ
75、76 ボールプランジャ
751、761 ボール
90 人工骨
O74 中心軸
t21A、t21B 厚さ
W21A、W21B 幅
α1、α21A、α21B、α3、α4 矢印
β2A、β21A、β4 矢印
θ21A、θ21B 回動角度
Claims (9)
- 先端部同士が回動可能に連結された一対の第1の長尺体を有する第1のブレードと、
前記第1のブレードに並設され、先端部同士が回動可能に連結された一対の第2の長尺体を有する第2のブレードと、
前記各第1の長尺体と前記各第2の長尺体とに着脱自在に装着され、その装着状態で、前記第1のブレードと前記第2のブレードとを並設させて連結するとともに、前記第1の長尺体同士の回動角度と、前記第2の長尺体同士の回動角度とを調整する角度調整機構とを備えることを特徴とする開骨器具。 - 前記角度調整機構は、前記装着状態で前記一対の第1の長尺体のうちの一方の第1の長尺体と、前記一対の第2の長尺体のうちの、前記一方の第1の長尺体と同じ側に位置する一方の第2の長尺体とに係合する第1の係合部材と、
前記装着状態で前記一対の第1の長尺体のうちの他方の第1の長尺体と、前記一対の第2の長尺体のうちの、前記他方の第1の長尺体と同じ側に位置する他方の第2の長尺体とに係合する第2の係合部材と、
前記第1の係合部材と前記第2の係合部材とに螺合するネジ部材とを有し、
前記ネジ部材を回転操作することにより、その回転方向に応じて、前記第1の係合部材と前記第2の係合部材とを接近または離間させ得るよう構成されている請求項1に記載の開骨器具。 - 前記角度調整機構は、前記各第1の長尺体と前記各第2の長尺体とに装着される際、前記各第1の長尺体の基端部と前記各第2の長尺体の基端部とに先端側に向かって差し込まれて、前記装着状態となる請求項1または2に記載の開骨器具。
- 前記装着状態を維持するロック部を備える請求項1ないし3のいずれか1項に記載の開骨器具。
- 前記ロック部は、ボールプランジャを有する請求項4に記載の開骨器具。
- 前記第1のブレードおよび前記第2のブレードのうちの一方のブレードは、他方のブレードに対する前記装着状態の維持が解除された状態で、前記他方のブレードから独立して、前記一方のブレードが有する長尺体同士の回動角度を前記角度調整機構により再度調整可能となる請求項4または5に記載の開骨器具。
- 前記一方のブレードは、該一方のブレードが有する長尺体同士の回動角度が再度調整された後、前記他方のブレードの長手方向に沿って該他方のブレードから離間され得る請求項6に記載の開骨器具。
- 前記他方のブレードは、該他方のブレードが有する長尺体同士の回動角度が調整された後に、該回動角度を維持する角度維持部材を有する請求項7に記載の開骨器具。
- 前記第1のブレードまたは前記第2のブレードに設置され、該ブレードが有する長尺体同士の回動角度を示す目盛りが付された目盛り部材を備える請求項1ないし8のいずれか1項に記載の開骨器具。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017099292A JP6654601B2 (ja) | 2017-05-18 | 2017-05-18 | 開骨器具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017099292A JP6654601B2 (ja) | 2017-05-18 | 2017-05-18 | 開骨器具 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018192066A true JP2018192066A (ja) | 2018-12-06 |
| JP2018192066A5 JP2018192066A5 (ja) | 2020-01-16 |
| JP6654601B2 JP6654601B2 (ja) | 2020-02-26 |
Family
ID=64569302
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017099292A Active JP6654601B2 (ja) | 2017-05-18 | 2017-05-18 | 開骨器具 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6654601B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020138255A1 (ja) | 2018-12-27 | 2020-07-02 | 株式会社クラレ | 開大器 |
| CN116392197A (zh) * | 2023-03-30 | 2023-07-07 | 长沙年轮骨科医院有限公司 | 一种截骨器 |
| JP7597615B2 (ja) | 2021-02-26 | 2024-12-10 | 株式会社日本エム・ディ・エム | 骨切術用開大器 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008006140A (ja) * | 2006-06-30 | 2008-01-17 | Olympus Terumo Biomaterials Corp | 高位脛骨骨切術用開大器 |
| JP2017046783A (ja) * | 2015-08-31 | 2017-03-09 | HOYA Technosurgical株式会社 | 開骨器具 |
-
2017
- 2017-05-18 JP JP2017099292A patent/JP6654601B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008006140A (ja) * | 2006-06-30 | 2008-01-17 | Olympus Terumo Biomaterials Corp | 高位脛骨骨切術用開大器 |
| JP2017046783A (ja) * | 2015-08-31 | 2017-03-09 | HOYA Technosurgical株式会社 | 開骨器具 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020138255A1 (ja) | 2018-12-27 | 2020-07-02 | 株式会社クラレ | 開大器 |
| JP7597615B2 (ja) | 2021-02-26 | 2024-12-10 | 株式会社日本エム・ディ・エム | 骨切術用開大器 |
| CN116392197A (zh) * | 2023-03-30 | 2023-07-07 | 长沙年轮骨科医院有限公司 | 一种截骨器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6654601B2 (ja) | 2020-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2353549B1 (en) | Articulating humeral head prosthesis | |
| CN110494090B (zh) | 骨锚组件和相关仪器 | |
| CA2824962C (en) | Reamer guide systems | |
| EP2563252B1 (en) | Bone fixation systems | |
| EP2574292B1 (en) | Patella drilling system | |
| JP2017046783A (ja) | 開骨器具 | |
| US8277457B1 (en) | Orthopaedic inserter using a collet mechanism | |
| WO1998034555A1 (en) | Modular intramedullary fixation system and insertion instrumentation | |
| CN111818880B (zh) | 关节镜下肩关节成形术、组件、器械及其使用方法 | |
| EP4252682B1 (en) | A femoral nail and instrumentation system | |
| EP3334384B1 (en) | Glenoid fossa prosthesis | |
| JP6765833B2 (ja) | 患者の骨に外科用器具を取り付けるためのシステム及び方法 | |
| JP6654601B2 (ja) | 開骨器具 | |
| JP6626474B2 (ja) | 開骨器具 | |
| CN110381867B (zh) | 具有可移动末端的脊柱螺钉 | |
| CN108135703B (zh) | 用于髋臼杯紧固件的钻孔引导件 | |
| EP2268232A1 (en) | A cup component of an orthopaedic joint prosthesis | |
| EP3624737A1 (en) | Implant assembly tools | |
| US20260083564A1 (en) | Glenoid implant components and instruments therefor | |
| JP2016209435A (ja) | 開骨器具および開骨器具セット | |
| JP6616039B1 (ja) | 開骨器具 | |
| US20210121296A1 (en) | Radial-capitellar implant | |
| JP2021010711A (ja) | 開骨器具 | |
| JP2025536992A (ja) | 手術ロボット用術具固定装置 | |
| JP2018061680A (ja) | 骨固定部材の適用器具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20190619 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190619 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191202 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191202 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20191202 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20191210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6654601 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |