JP2018192592A - ワーク取出しシステム - Google Patents
ワーク取出しシステム Download PDFInfo
- Publication number
- JP2018192592A JP2018192592A JP2017100353A JP2017100353A JP2018192592A JP 2018192592 A JP2018192592 A JP 2018192592A JP 2017100353 A JP2017100353 A JP 2017100353A JP 2017100353 A JP2017100353 A JP 2017100353A JP 2018192592 A JP2018192592 A JP 2018192592A
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- robot
- dimensional point
- dimensional
- point group
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1684—Tracking a line or surface by means of sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1612—Program controls characterised by the hand, wrist, grip control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/16—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring distance of clearance between spaced objects
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39058—Sensor, calibration of sensor, potentiometer
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39473—Autonomous grasping, find, approach, grasp object, sensory motor coordination
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39484—Locate, reach and grasp, visual guided grasping
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39527—Workpiece detector, sensor mounted in, near hand, gripper
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40053—Pick 3-D object from pile of objects
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Manipulator (AREA)
Abstract
【解決手段】ロボット2と、ロボット2の手先部3に取り付けられワークWを把持するハンド4と、手先部3に取り付けられ、コンテナY内の部分領域の3次元点群の位置情報を取得する3次元センサ5と、取得された第1部分領域の3次元点群の位置情報に基づいてワークWの位置および姿勢を算出するワーク状態算出部8と、取得された第1部分領域の3次元点群の位置情報に基づき、次に位置情報を取得する第2部分領域のロボット位置を算出するデータ取得位置算出部9と、算出されたワークWの位置および姿勢並びに算出された第2部分領域のロボット位置に基づいて、ロボット2およびハンド4を制御する制御部7とを備えるワーク取出しシステム1を提供する。
【選択図】図1
Description
このワーク取出しシステムは、ロボットの手先部に、コンテナの上部開口全体を視野内に収めて撮影し、視野内のワークの3次元点群を取得可能な3次元センサを取り付けている。
本発明の一態様は、ロボットと、該ロボットの手先部に取り付けられワークを把持するハンドと、前記ロボットの前記手先部に取り付けられ、コンテナ内の部分領域の3次元点群の位置情報を取得する3次元センサと、該3次元センサにより取得された第1部分領域の前記3次元点群の位置情報に基づいて前記ワークの位置および姿勢を算出するワーク状態算出部と、前記3次元センサにより取得された前記第1部分領域の前記3次元点群の位置情報に基づいて、次に位置情報を取得する第2部分領域のロボット位置を算出するデータ取得位置算出部と、前記ワーク状態算出部により算出された前記ワークの位置および姿勢並びに前記データ取得位置算出部により算出された前記第2部分領域のロボット位置に基づいて、前記ロボットおよび前記ハンドを制御する制御部とを備えるワーク取出しシステムを提供する。
すなわち、3次元センサによる次の3次元点群のデータ取得位置が、予め教示された位置によって決められるのではなく、3次元センサによって取得された3次元点群の位置情報に基づいて決められるので、コンテナ内の3次元点群を部分的にしか取得できない3次元センサを装着していても、ロボットによる無駄な移動動作および3次元センサによる無駄な3次元点群の取得を防止して効率的にワークを取り出すことができる。
このようにすることで、コンテナ内にバラ積みされているワークは、最も高い高さ位置に配置されているものが最も取り出しやすいワークである可能性が高い。したがって、次に位置情報を取得する第2部分領域の位置として、先に取得された3次元点群内において最も高い高さ位置に配置されている3次元点を基準に算出することにより、少なくとも1つのワークを認識可能な第2部分領域の3次元点群を取得することができる。
このようにすることで、第1部分領域の3次元点群の中で最も高さの高い位置に配置される3次元点を中心とする範囲に一致する水平な第2部分領域のロボット位置を簡易に算出することができる。
このようにすることで、3次元点群において平面領域として認識できる部分はロボットでのワークの取り出し成功の可能性が高いので、平面領域の重心位置を基準とすることにより、少なくとも1つのワークを認識して取り出し可能な第2部分領域の3次元点群を取得することができる。
このようにすることで、第1部分領域の3次元点群の中で平面領域の重心位置を中心とする範囲に一致する水平な第2部分領域のロボット位置を簡易に算出することができる。
このようにすることで、平面領域内に存在する3次元点の数が所定の閾値以下である場合に、3次元センサに対して平面領域が大きく傾斜している可能性があるので、3次元センサの傾斜角度を変更することで、3次元点群を正しく検出し得る第2部分領域のロボット位置を算出することができる。
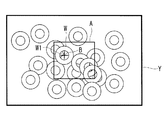
本実施形態に係るワーク取出しシステム1は、図1に示されるように、複数のワークWを収容し上方に開放されたコンテナYの近傍に設置されたロボット2と、ロボット2の手先部3に取り付けられワークWを把持するハンド4と、ロボット2の手先部3に取り付けられ、コンテナY内のワークWの3次元情報を取得する3次元センサ5と、3次元センサ5により取得された3次元情報を処理する情報処理部6と、情報処理部6による処理結果に基づいてロボット2およびハンド4を制御する制御部7とを備えている。情報処理部6および制御部7は、情報を記憶する不図示のメモリおよび情報処理を行う不図示のプロセッサを備えている。
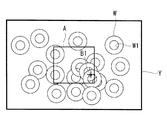
3次元センサ5は、図3に示されるように、コンテナYの上部開口の大きさよりも小さいデータ取得範囲Aを備え、コンテナY内にバラ積みされた複数のワークWの表面の内、データ取得範囲A内に配置される表面上の複数の点(3次元点群)の3次元位置の情報を上方から取得して情報処理部6に送るようになっている。図中、符号Bはデータ取得範囲A内に存在する3次元点の内の1つを示している。
ワーク状態算出部8は、例えば、予め登録しておいた3次元モデルデータを用いてモデルマッチングを行うことにより、ワークWを認識するようになっている。また、認識されたワークWの、例えば重心位置により、ワークWの位置座標を算出し、3次元モデルデータに対する変形の度合い、あるいは、認識されたワークWの表面上の3次元点Bの位置情報によってワークWの傾き角度および傾き方向等の姿勢を算出するようになっている。
本実施形態に係るワーク取出しシステム1を用いて、コンテナY内にバラ積みされたワークWを取り出すには、図2に示されるように、まず、予め設定された最初のデータ取得位置、例えば、コンテナYの中央の所定領域をデータ取得範囲Aとする位置に3次元センサ5を配置するようにロボット2を作動させる(ステップS1)。
ステップS4においてワークWが認識されなかった場合にはステップS7からの工程が実施される。
これにより、コンテナY内の3次元点群を部分的にしか取得できない3次元センサ5を装着していても、ロボット2による無駄な移動動作および3次元センサ5による無駄な3次元点群の位置情報の取得を防止して効率的にワークWを取り出すことができるという利点がある。
例えば、最も高い位置に配置されている3次元点B1の鉛直上方であって、所定の高さ位置に3次元センサ5を配置するようにロボット2を動作させてもよい。
そこで、ワークWを取り出して、搬送先に移動する途中で、ステップS2におけるデータ取得位置にて再度3次元点群の位置情報を取得することにしてもよい。これにより、精度よくワークWを認識可能な3次元点群を取得することができる。
2 ロボット
3 手先部
4 ハンド
5 3次元センサ
7 制御部
8 ワーク状態算出部
9 データ取得位置算出部
A データ取得範囲(第1部分領域、第2部分領域)
B,B1 3次元点
W ワーク
Y コンテナ
Claims (6)
- ロボットと、
該ロボットの手先部に取り付けられワークを把持するハンドと、
前記ロボットの前記手先部に取り付けられ、コンテナ内の部分領域の3次元点群の位置情報を取得する3次元センサと、
該3次元センサにより取得された第1部分領域の前記3次元点群の位置情報に基づいて前記ワークの位置および姿勢を算出するワーク状態算出部と、
前記3次元センサにより取得された前記第1部分領域の前記3次元点群の位置情報に基づいて、次に位置情報を取得する第2部分領域のロボット位置を算出するデータ取得位置算出部と、
前記ワーク状態算出部により算出された前記ワークの位置および姿勢並びに前記データ取得位置算出部により算出された前記第2部分領域のロボット位置に基づいて、前記ロボットおよび前記ハンドを制御する制御部とを備えるワーク取出しシステム。 - 前記データ取得位置算出部が、前記第1部分領域の前記3次元点群の中で最も高さの高い位置に配置される3次元点を基準として前記第2部分領域のロボット位置を算出する請求項1に記載のワーク取出しシステム。
- 前記データ取得位置算出部が、前記第1部分領域の前記3次元点群の中で最も高さの高い3次元点の水平方向位置が前記第2部分領域の中心となり、垂直方向位置が所定高さになるように前記第2部分領域のロボット位置を算出する請求項2に記載のワーク取出しシステム。
- 前記データ取得位置算出部が、前記第1部分領域の前記3次元点群により構成される平面領域の重心位置を基準として前記第2部分領域のロボット位置を算出する請求項1に記載のワーク取出しシステム。
- 前記データ取得位置算出部が、前記重心位置の水平方向位置が前記第2部分領域の中心となり、垂直方向位置が所定高さになるように前記第2部分領域のロボット位置を算出する請求項4に記載のワーク取出しシステム。
- 前記データ取得位置算出部が、前記平面領域内に存在する3次元点の数が所定の閾値以下である場合に、前記3次元センサの傾斜角度を変更して取得される前記第2部分領域のロボット位置を算出する請求項4または請求項5のいずれかに記載のワーク取出しシステム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017100353A JP6487495B2 (ja) | 2017-05-19 | 2017-05-19 | ワーク取出しシステム |
| US15/925,883 US10434652B2 (en) | 2017-05-19 | 2018-03-20 | Workpiece picking system |
| CN201810405010.1A CN108942916B (zh) | 2017-05-19 | 2018-04-28 | 工件取出系统 |
| DE102018111370.6A DE102018111370B4 (de) | 2017-05-19 | 2018-05-14 | Werkstückaufnahmesystem |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017100353A JP6487495B2 (ja) | 2017-05-19 | 2017-05-19 | ワーク取出しシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018192592A true JP2018192592A (ja) | 2018-12-06 |
| JP6487495B2 JP6487495B2 (ja) | 2019-03-20 |
Family
ID=64269920
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017100353A Active JP6487495B2 (ja) | 2017-05-19 | 2017-05-19 | ワーク取出しシステム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10434652B2 (ja) |
| JP (1) | JP6487495B2 (ja) |
| CN (1) | CN108942916B (ja) |
| DE (1) | DE102018111370B4 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019084601A (ja) * | 2017-11-02 | 2019-06-06 | キヤノン株式会社 | 情報処理装置、把持システムおよび情報処理方法 |
| JP7107249B2 (ja) * | 2019-02-26 | 2022-07-27 | 株式会社ダイフク | 物品移載装置 |
| DE102019106068B3 (de) | 2019-03-11 | 2020-06-10 | Hiwin Technologies Corp. | System zur beseitigung von überlagerungen zufällig angeordneter werkstücke |
| JP7120153B2 (ja) * | 2019-05-21 | 2022-08-17 | トヨタ自動車株式会社 | ワーク識別方法 |
| JP7376268B2 (ja) * | 2019-07-22 | 2023-11-08 | ファナック株式会社 | 三次元データ生成装置及びロボット制御システム |
| JP7368135B2 (ja) * | 2019-07-31 | 2023-10-24 | ファナック株式会社 | 複数の可動部を有する物品搬送システム |
| EP3809211B1 (de) * | 2019-10-15 | 2021-12-15 | Tyrolon-Schulnig GmbH | System mit einer datenerzeugungseinheit in einem greifarm |
| KR102918708B1 (ko) | 2020-07-21 | 2026-01-28 | 삼성전자주식회사 | 로봇 및 그 제어 방법 |
| JP7598627B2 (ja) * | 2021-01-19 | 2024-12-12 | 株式会社イシダ | 物品集積装置 |
| EP4382246A4 (en) * | 2021-08-06 | 2025-02-19 | Fuji Corporation | COIN CAPTURE METHOD AND COIN CAPTURE SYSTEM |
| JP2023088670A (ja) * | 2021-12-15 | 2023-06-27 | コニカミノルタ株式会社 | ピッキング装置、ピッキング方法及びプログラム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6478103A (en) * | 1987-09-19 | 1989-03-23 | Nissan Motor | Work recognizing method by image processing |
| JP2000326273A (ja) * | 1999-05-17 | 2000-11-28 | Pioneer Electronic Corp | 水晶素板の配列装置 |
| JP2002200588A (ja) * | 2000-12-28 | 2002-07-16 | Denso Corp | ロボットによる把持可能部品の把持位置検出方法及びその装置 |
| JP2004160567A (ja) * | 2002-11-11 | 2004-06-10 | Fanuc Ltd | 物品取出し装置 |
| JP2012024903A (ja) * | 2010-07-27 | 2012-02-09 | Fanuc Ltd | ワーク取出し装置およびワーク取出し方法 |
| JP2014058004A (ja) * | 2012-09-14 | 2014-04-03 | Yaskawa Electric Corp | ロボット装置 |
| JP2014237188A (ja) * | 2013-06-07 | 2014-12-18 | 株式会社安川電機 | ワーク検出装置、ロボットシステム、被加工物の製造方法及びワーク検出方法 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4985846A (en) | 1989-05-11 | 1991-01-15 | Fallon Patrick J | Acoustical/optical bin picking system |
| JP3805302B2 (ja) | 2002-12-13 | 2006-08-02 | ファナック株式会社 | ワーク取出し装置 |
| JP4309439B2 (ja) * | 2007-03-30 | 2009-08-05 | ファナック株式会社 | 対象物取出装置 |
| JP5265296B2 (ja) | 2008-10-10 | 2013-08-14 | 本田技研工業株式会社 | ワーク取り出し方法 |
| US9008841B2 (en) | 2009-08-27 | 2015-04-14 | Abb Research Ltd. | Robotic picking of parts from a parts holding bin |
| JP5282717B2 (ja) | 2009-10-19 | 2013-09-04 | 株式会社安川電機 | ロボットシステム |
| JP5596373B2 (ja) | 2010-03-04 | 2014-09-24 | 株式会社関電工 | 中高層ビルにおける垂直幹線の延線工法及びこれに使用する装置 |
| DE112011103794B4 (de) * | 2010-11-17 | 2019-01-24 | Mitsubishi Electric Corporation | Aufnehmervorrichtung für Werkstücke |
| JP5316580B2 (ja) | 2011-05-17 | 2013-10-16 | 株式会社安川電機 | ロボットシステム |
| JP5977544B2 (ja) | 2012-03-09 | 2016-08-24 | キヤノン株式会社 | 情報処理装置、情報処理方法 |
| JP5642738B2 (ja) | 2012-07-26 | 2014-12-17 | ファナック株式会社 | バラ積みされた物品をロボットで取出す装置及び方法 |
| JP5642759B2 (ja) | 2012-10-31 | 2014-12-17 | ファナック株式会社 | 物品取出装置及び物品取出方法 |
| JP5754454B2 (ja) * | 2013-03-18 | 2015-07-29 | 株式会社安川電機 | ロボットピッキングシステム及び被加工物の製造方法 |
| JP6415026B2 (ja) | 2013-06-28 | 2018-10-31 | キヤノン株式会社 | 干渉判定装置、干渉判定方法、コンピュータプログラム |
| JP5929854B2 (ja) * | 2013-07-31 | 2016-06-08 | 株式会社安川電機 | ロボットシステムおよび被加工物の製造方法 |
| JP5905549B1 (ja) * | 2014-09-16 | 2016-04-20 | ファナック株式会社 | バラ積みされた物品を取出す物品取出装置 |
| JP2016099257A (ja) | 2014-11-21 | 2016-05-30 | キヤノン株式会社 | 情報処理装置及び情報処理方法 |
| JP6522488B2 (ja) * | 2015-07-31 | 2019-05-29 | ファナック株式会社 | ワークの取り出し動作を学習する機械学習装置、ロボットシステムおよび機械学習方法 |
-
2017
- 2017-05-19 JP JP2017100353A patent/JP6487495B2/ja active Active
-
2018
- 2018-03-20 US US15/925,883 patent/US10434652B2/en active Active
- 2018-04-28 CN CN201810405010.1A patent/CN108942916B/zh active Active
- 2018-05-14 DE DE102018111370.6A patent/DE102018111370B4/de active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6478103A (en) * | 1987-09-19 | 1989-03-23 | Nissan Motor | Work recognizing method by image processing |
| JP2000326273A (ja) * | 1999-05-17 | 2000-11-28 | Pioneer Electronic Corp | 水晶素板の配列装置 |
| JP2002200588A (ja) * | 2000-12-28 | 2002-07-16 | Denso Corp | ロボットによる把持可能部品の把持位置検出方法及びその装置 |
| JP2004160567A (ja) * | 2002-11-11 | 2004-06-10 | Fanuc Ltd | 物品取出し装置 |
| JP2012024903A (ja) * | 2010-07-27 | 2012-02-09 | Fanuc Ltd | ワーク取出し装置およびワーク取出し方法 |
| JP2014058004A (ja) * | 2012-09-14 | 2014-04-03 | Yaskawa Electric Corp | ロボット装置 |
| JP2014237188A (ja) * | 2013-06-07 | 2014-12-18 | 株式会社安川電機 | ワーク検出装置、ロボットシステム、被加工物の製造方法及びワーク検出方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108942916A (zh) | 2018-12-07 |
| US20180333857A1 (en) | 2018-11-22 |
| DE102018111370A1 (de) | 2018-11-22 |
| US10434652B2 (en) | 2019-10-08 |
| CN108942916B (zh) | 2019-08-23 |
| DE102018111370B4 (de) | 2019-11-28 |
| JP6487495B2 (ja) | 2019-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6487495B2 (ja) | ワーク取出しシステム | |
| KR102650492B1 (ko) | 자동화된 패키지 등록 메커니즘과 이를 작동시키는 방법을 구비한 로봇 시스템 | |
| JP5788460B2 (ja) | バラ積みされた物品をロボットで取出す装置及び方法 | |
| JP6088563B2 (ja) | 位置及び姿勢の変換演算機能を備えたワーク取出しロボットシステム、及びワーク取出し方法 | |
| JP4940715B2 (ja) | ピッキングシステム | |
| JP6529302B2 (ja) | 情報処理装置、情報処理方法、プログラム | |
| JP6140204B2 (ja) | 3次元センサを備えた搬送ロボットシステム | |
| JP5558585B2 (ja) | ワーク取り出し装置 | |
| EP3383593B1 (en) | Teaching an industrial robot to pick parts | |
| JP5620445B2 (ja) | 選択条件に基づいてロボットの保持位置姿勢を決定する物品取出装置 | |
| JP2014161965A (ja) | 物品取り出し装置 | |
| JP2005305613A (ja) | 物品取出し装置 | |
| JP2019509559A (ja) | センサ誘導式ロボットを用いたボックスの位置特定、分離、およびピッキング | |
| US9604360B2 (en) | Robot system for preventing accidental dropping of conveyed objects | |
| JP5936108B2 (ja) | 対象物取り出し装置と方法 | |
| CN110461550A (zh) | 机器人程序的生成装置及生成方法 | |
| JP6666764B2 (ja) | ワーク認識方法及びランダムピッキング方法 | |
| JP5879704B2 (ja) | ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法 | |
| CN113269112A (zh) | 一种抓取区域的识别方法、装置、电子设备及存储介质 | |
| JP6908908B2 (ja) | ロボットアームの経路生成装置および経路生成プログラム | |
| JP2015182212A (ja) | ロボットシステム、ロボット、制御装置、及び制御方法 | |
| JP6176091B2 (ja) | 把持方法、運搬方法及びロボット | |
| JP2015157343A (ja) | ロボット、ロボットシステム、制御装置、および制御方法 | |
| JP7286524B2 (ja) | ピッキングロボット、ピッキング方法及びプログラム | |
| WO2025146718A1 (ja) | 画像処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180829 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20181015 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6487495 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |