JP2019010739A - 生コンクリートの混練状態監視装置 - Google Patents
生コンクリートの混練状態監視装置 Download PDFInfo
- Publication number
- JP2019010739A JP2019010739A JP2017126901A JP2017126901A JP2019010739A JP 2019010739 A JP2019010739 A JP 2019010739A JP 2017126901 A JP2017126901 A JP 2017126901A JP 2017126901 A JP2017126901 A JP 2017126901A JP 2019010739 A JP2019010739 A JP 2019010739A
- Authority
- JP
- Japan
- Prior art keywords
- ready
- mixer
- mixed concrete
- kneading
- timing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- On-Site Construction Work That Accompanies The Preparation And Application Of Concrete (AREA)
- Preparation Of Clay, And Manufacture Of Mixtures Containing Clay Or Cement (AREA)
Abstract
Description
11 表示手段
12 記憶手段
13 制御部
14 ミキサー
15 制御装置
Claims (4)
- 生コンクリートの混練状態を監視する監視装置であって、
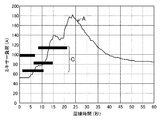
生コンクリートの混練中に、ミキサーにかかる負荷の時間変化を示す負荷曲線を表示する表示手段と、
予め測定された、生コンクリートの混練中におけるミキサーの負荷曲線と、生コンクリートの各材料をミキサーに投入したタイミングとからなるデータが、混練条件毎に記憶された記憶手段と
を備え、
前記表示手段は、前記記憶手段に記憶されたデータから、所定の混練条件におけるミキサーの負荷曲線に加えて、生コンクリートの各材料をミキサーに投入したタイミングを同時に表示する、生コンクリートの混練状態監視装置。 - 前記表示手段には、前記所定の混練条件におけるミキサーの負荷曲線に加えて、前記記憶手段から、前記混練条件と同一の混練条件において、生コンクリートの材料のうち、少なくとも一つの材料を投入するタイミングを変えて混練したときのデータを抽出し、該データにおけるミキサーの負荷曲線を重ねて表示する、請求項1に記載の生コンクリートの混練状態監視装置。
- 前記表示手段は、前記所定の混練条件におけるミキサーの負荷曲線に、生コンクリートの各材料をミキサーに投入したタイミングを重ねて表示する、請求項1に記載の生コンクリートの混練状態監視装置。
- 前記記憶手段に記憶されたデータには、生コンクリートの各材料をミキサーに投入したタイミングに加えて、生コンクリートの各材料をミキサーに投入した投入量がさらに含まれており、
前記表示手段には、生コンクリートの各材料をミキサーに投入した投入量が同時に表示される、請求項1に記載の生コンクリートの混練状態監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017126901A JP2019010739A (ja) | 2017-06-29 | 2017-06-29 | 生コンクリートの混練状態監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017126901A JP2019010739A (ja) | 2017-06-29 | 2017-06-29 | 生コンクリートの混練状態監視装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019010739A true JP2019010739A (ja) | 2019-01-24 |
Family
ID=65227623
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017126901A Pending JP2019010739A (ja) | 2017-06-29 | 2017-06-29 | 生コンクリートの混練状態監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019010739A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7547671B1 (ja) | 2024-03-28 | 2024-09-09 | Ube三菱セメント株式会社 | 生コンクリートの品質予測方法、品質予測プログラム、生コンクリートの製造方法、及び、生コンクリートの品質予測装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59154257A (ja) * | 1983-02-23 | 1984-09-03 | 日工株式会社 | Crtを用いたコンクリ−トミキサの混練状態表示装置 |
| JPS59224311A (ja) * | 1983-06-03 | 1984-12-17 | システム綜合開発株式会社 | 生コンクリ−トの混練り監視装置 |
| JP2006272592A (ja) * | 2005-03-28 | 2006-10-12 | Kayaba Ind Co Ltd | ミキサ車 |
| JP2015174433A (ja) * | 2014-03-18 | 2015-10-05 | リブコンエンジニアリング株式会社 | 分割練り混ぜ工法と分割練り混ぜ装置 |
-
2017
- 2017-06-29 JP JP2017126901A patent/JP2019010739A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59154257A (ja) * | 1983-02-23 | 1984-09-03 | 日工株式会社 | Crtを用いたコンクリ−トミキサの混練状態表示装置 |
| JPS59224311A (ja) * | 1983-06-03 | 1984-12-17 | システム綜合開発株式会社 | 生コンクリ−トの混練り監視装置 |
| JP2006272592A (ja) * | 2005-03-28 | 2006-10-12 | Kayaba Ind Co Ltd | ミキサ車 |
| JP2015174433A (ja) * | 2014-03-18 | 2015-10-05 | リブコンエンジニアリング株式会社 | 分割練り混ぜ工法と分割練り混ぜ装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7547671B1 (ja) | 2024-03-28 | 2024-09-09 | Ube三菱セメント株式会社 | 生コンクリートの品質予測方法、品質予測プログラム、生コンクリートの製造方法、及び、生コンクリートの品質予測装置 |
| JP7600462B1 (ja) | 2024-03-28 | 2024-12-16 | Ube三菱セメント株式会社 | 生コンクリートの品質予測方法、品質予測プログラム、生コンクリートの製造方法、及び、生コンクリートの品質予測装置 |
| JP2025152019A (ja) * | 2024-03-28 | 2025-10-09 | Ube三菱セメント株式会社 | 生コンクリートの品質予測方法、品質予測プログラム、生コンクリートの製造方法、及び、生コンクリートの品質予測装置 |
| JP2025155481A (ja) * | 2024-03-28 | 2025-10-14 | Ube三菱セメント株式会社 | 生コンクリートの品質予測方法、品質予測プログラム、生コンクリートの製造方法、及び、生コンクリートの品質予測装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102458198B1 (ko) | 넓은 스피드 범위의 콘크리트 모니터링 교정 | |
| KR20120004424A (ko) | 콘크리트를 모니터링하고 제어하기 위한 믹서 파형 분석 | |
| CA2945663A1 (en) | Dynamic segregation monitoring of concrete | |
| KR101985801B1 (ko) | 전극 활물질 슬러리 점도 제어 방법 및 전극 활물질 슬러리 제조장치 | |
| MX2010010992A (es) | Metodo para monitorear tixotropia en un tambor mezclador de concreto. | |
| JP2009184273A (ja) | コンクリート材料の配合制御方法及びシステム | |
| US10888919B2 (en) | Core forming device and core forming method | |
| SE538466C2 (en) | Grout preparation and administration | |
| TW201350229A (zh) | 模砂之混練調整方法 | |
| JP2011102038A (ja) | ゴム組成物の混合方法及び混合装置 | |
| US11305459B2 (en) | Device and method for semi-automatic concrete mixing and for training operators for use thereof | |
| JP2019010739A (ja) | 生コンクリートの混練状態監視装置 | |
| JP7444520B2 (ja) | 二次電池用スラリーの製造方法及び製造装置 | |
| CN104010721A (zh) | 涂料混合装置以及涂料混合方法 | |
| CN114840556A (zh) | 搅拌强度调整方法、装置、设备及存储介质 | |
| JP6274432B2 (ja) | セメントミキシングシステム車 | |
| CN103921417A (zh) | 具有合模力控制功能的注塑成型机的控制装置 | |
| JP6274433B2 (ja) | セメントミキシングシステム車 | |
| CN105437372B (zh) | 一种混凝土搅拌运输车的搅拌筒的控制方法及装置 | |
| JPS6343126B2 (ja) | ||
| DE102021206495A1 (de) | Viskositätsbestimmung eines Baustoffs in einer Mischtrommel eines Fahrmischers | |
| JPS61217215A (ja) | コンクリ−トの製造方法及びその装置 | |
| CN106626075A (zh) | 一种温度可控的混凝土制造系统的控制装置 | |
| JP5838003B1 (ja) | 分割練混ぜ方法と分割練混ぜ装置 | |
| JP3110590B2 (ja) | 生コンクリートのスランプ値の推定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210420 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210907 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220308 |