JP2019016065A - 画像処理装置およびその制御方法 - Google Patents
画像処理装置およびその制御方法 Download PDFInfo
- Publication number
- JP2019016065A JP2019016065A JP2017131487A JP2017131487A JP2019016065A JP 2019016065 A JP2019016065 A JP 2019016065A JP 2017131487 A JP2017131487 A JP 2017131487A JP 2017131487 A JP2017131487 A JP 2017131487A JP 2019016065 A JP2019016065 A JP 2019016065A
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- comparison
- pixels
- image processing
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/36—Applying a local operator, i.e. means to operate on image points situated in the vicinity of a given point; Non-linear local filtering operations, e.g. median filtering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/751—Comparing pixel values or logical combinations thereof, or feature values having positional relevance, e.g. template matching
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Nonlinear Science (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Abstract
Description
所与の座標を基準として配置されるN個の画素の相対座標を示す座標情報を記憶する記憶手段と、
前記座標情報に基づいて、前記入力画像における着目画素を前記所与の座標とした場合の該入力画像における画素の画素値を取得し、該入力画像に含まれる2個の画素の画素値を比較し第1の比較結果を出力する第1の比較手段と、
前記第1の比較結果に基づいて、前記着目画素の特徴量を導出する導出手段と、
を有し、
前記第1の比較手段は、2個の画素の画素値の比較をM回実行してM個の前記第1の比較結果を出力し、第n回目(2≦n≦M)で比較する2個の画素は第(n−1)回目で比較した2個の画素の一方を含み、
前記導出手段は、前記第1の比較手段により出力されたM個の前記第1の比較結果を連結して前記着目画素の特徴量として導出する。
本発明に係る画像処理装置の第1実施形態として、画像のバイナリ特徴量を導出する装置を例に挙げて以下に説明する。具体的には、着目画素の座標を基準として、順序(インデックス)が付された複数の相対画素位置(座標)を予め決めておく。そして、連続する2つのインデックスの相対画素位置の画素の画素値に基づいてバイナリ特徴量を導出する。
第1実施形態を説明するにあたって、前提となる事項について説明する。以下の説明では、画像は8ビット整数(256階調)のモノクロ画像とする。また、着目画素のバイナリ特徴量を算出する方法を説明するが、着目画素とは、画像の画素を順次走査する際の対象画素、あるいは、画像から特徴点検出をおこなった結果として複数の特徴点を順次走査する際の対象画素であるものとする。着目画素の選び方については説明は省略するが、任意の手法が利用可能である。取得された特徴量は、時間的に連続する他の画像で得た画素の特徴量と比較される(つまりハミング距離が計算される)。ハミング距離が最も短い画素同士をマッチングさせ、マッチングした画素の相対座標を得ることで、画素の動きとすることができる。そのため、物体認識などにも応用することできる。
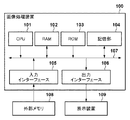
図1は、第1実施形態に係る画像処理装置の構成を示すブロック図である。
図2は、第1実施形態における特徴量の生成を示すフローチャートである。以下のフローチャートの説明において、各ステップの符号をSと表記することとする。ここでは、着目画素に対する64ビットのバイナリ特徴量を生成する。なお、本実施形態では、図中の矢印で示される順で処理が実施されるものとして説明するが、同一の結果を生成するフローであれば、他の処理の順序やループ処理を用いてもよい。
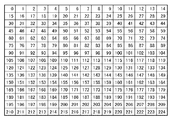
図3は、特徴量の生成における比較パターンを例示的に示す図である。具体的には、所与の座標である着目画素を基準として配置される複数(N個)の画素の相対座標を例示的に示している。図3(a)は、従来技術であるBRIEFにおける線分の配置パターンである。図3(b)は、第1実施形態における線分の配置パターンである。
・連続する2つの相対座標は少なくとも1画素以上離れて設定される。つまり、任意のnについて、√{(xn−xn+1)2+(yn−yn+1)2}≧1を満足する。ただし、2画素以上離したほうが後述の識別能力が高くなる。
・始点が同一の線分は少なくとも終点が1画素以上離れている。つまり、任意のnについて、xn=xn+sかつyn=yn+s、ならば、√{(xn+1−xn+s+1)2+(yn+1−yn+s+1)2}≧1を満足する。ここで、sは非ゼロの整数である。ただし、2画素以上離したほうが後述の識別能力が高くなる。
・線分の始点と終点が逆転したのみの線分は許可しない。つまり、任意のnについて、xn=xn+s+1かつyn=yn+s+1の場合、xn+1≠xn+s及びyn+1≠yn+sの少なくとも一方を満たす。

1回目のループ:第0番目の画素と第3番目の画素
2回目のループ:第3番目の画素と第6番目の画素
3回目のループ:第6番目の画素と第1(=(6+3)mod8)番目の画素
4回目のループ:第1番目の画素と第4番目の画素
5回目のループ:第4番目の画素と第7番目の画素
6回目のループ:第7番目の画素と第2(=(7+3)mod8)番目の画素
第2実施形態では、着目画素に関して設定された34個の相対座標の画素値に基づいて、当該着目画素に対する64ビットの特徴量を生成する例について説明する。具体的には、着目画素の座標を基準とした順序(インデックス)が付された複数の相対画素位置(座標)を予め決めておく。1つ飛びの2つのインデックスの相対画素位置の画素の画素値に基づいてバイナリ特徴量を導出する。なお、装置構成は第1実施形態(図1)と同様であるため説明は省略する。
図4は、第2実施形態における特徴量の生成を示すフローチャートである。上述のように、ここでは、34個の相対座標データから64ビットの特徴量を生成することを想定する。また、以下の説明では、第1実施形態(図2)と異なる部分についてのみ説明する。
第3実施形態では、ハードウェア回路によりバイナリ特徴量を生成する装置を構成する場合の実装例について説明する。
図5は、第3実施形態に係る画像処理装置の構成を示すブロック図である。以下では、図5(a)に示すバイナリ特徴量の生成装置に関して説明する。
第4実施形態では、配列として示される特徴量を生成する形態について説明する。すなわち、第1〜第3実施形態では、1要素が1ビット値で表現されるバイナリ特徴量を生成する例について説明したが、第4実施形態では、1要素が複数ビット値で表現される特徴量を生成する。
図8は、第4実施形態における特徴量の生成を示すフローチャートである。特別な記載がない場合には、第1実施形態(図2)で説明した動作と同等である。ここでは、最終的に生成する特徴量(多次元ベクトル)は、arrで表す配列とする。第4実施形態では64個の要素を持つ、つまり、64次元ベクトルになる。S2010〜S2050、S2100〜S2120は、図2の同符号における動作と同じである。S2050の処理を実施後、S8090を実行する。
f(a,b)=a−b ・・・(1)
f(a,b)=127×(a−b)/255 ・・・(2)
f(a,b)=min(max(k(a−b),128),127) ・・・(3)
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (9)
- 入力画像の特徴量を導出する画像処理装置であって、
所与の座標を基準として配置されるN個の画素の相対座標を示す座標情報を記憶する記憶手段と、
前記座標情報に基づいて、前記入力画像における着目画素を前記所与の座標とした場合の該入力画像における画素の画素値を取得し、該入力画像に含まれる2個の画素の画素値を比較し第1の比較結果を出力する第1の比較手段と、
前記第1の比較結果に基づいて、前記着目画素の特徴量を導出する導出手段と、
を有し、
前記第1の比較手段は、2個の画素の画素値の比較をM回実行してM個の前記第1の比較結果を出力し、第n回目(2≦n≦M)で比較する2個の画素は第(n−1)回目で比較した2個の画素の一方を含み、
前記導出手段は、前記第1の比較手段により出力されたM個の前記第1の比較結果を連結して前記着目画素の特徴量として導出する
ことを特徴とする画像処理装置。 - 前記第1の比較手段は、第n回目の比較において、前記座標情報に含まれる第{c+(n−1)×k1}番目(ここで、cは任意の整数であり、k1は{c+(n−1)×k1}≦Nを満たす正整数)の画素の画素値と第{(c+n×k1)modN}番目の画素値とを比較する
ことを特徴とする請求項1に記載の画像処理装置。 - 前記第1の比較手段は、比較した2個の画素における画素値の大小を示す1ビット値を前記第1の比較結果として出力し、
前記導出手段は、前記第1の比較手段により出力されたM個の前記第1の比較結果をビット連結して得られるMビット長の値を前記着目画素の特徴量として導出する
ことを特徴とする請求項1又は2に記載の画像処理装置。 - 前記第1の比較手段は、比較した2個の画素における画素値の差分に対して所与の演算を行って得られる複数ビット値を前記第1の比較結果として出力し、
前記導出手段は、前記第1の比較手段により出力されたM個の前記第1の比較結果を連結して得られる配列を前記着目画素の特徴量として導出する
ことを特徴とする請求項1又は2に記載の画像処理装置。 - 前記N個の画素の画素値に含まれる2個の画素の画素値を比較し第2の比較結果を出力する第2の比較手段を更に有し、
前記第2の比較手段は、2個の画素の画素値の比較をM回実行してM個の前記第2の比較結果を出力し、第n回目の比較において、前記座標情報に含まれる第{c+(n−1)×k2}番目(ここで、k2≠k1を満たす正整数)の画素の画素値と第{(c+n×k2)modN}番目の画素値とを比較し、
前記導出手段は、更に前記第2の比較手段により出力されたM個の前記第2の比較結果を連結して前記着目画素の特徴量として導出する
ことを特徴とする請求項1又は2に記載の画像処理装置。 - 前記第1の比較手段は、比較した2個の画素における画素値の大小を示す1ビット値を前記第1の比較結果として出力し、
前記第2の比較手段は、比較した2個の画素における画素値の大小を示す1ビット値を前記第2の比較結果として出力し、
前記導出手段は、前記第1の比較手段により出力されたM個の前記第1の比較結果と前記第2の比較手段により出力されたM個の前記第2の比較結果とをビット連結して得られる2Mビット長の値を前記着目画素の特徴量として導出する
ことを特徴とする請求項5に記載の画像処理装置。 - 前記座標情報におけるN個の画素の相対座標は、前記所与の座標を中心とした1辺がK画素の正方領域(ただし、Kは、N<K2を満たす正整数)に対して配置される
ことを特徴とする請求項1乃至6の何れか1項に記載の画像処理装置。 - 入力画像の特徴量を導出する画像処理装置の制御方法であって、
所与の座標を基準として配置されるN個の画素の相対座標を示す座標情報に基づいて、前記入力画像における着目画素を前記所与の座標とした場合の該入力画像における画素の画素値を取得し、該入力画像に含まれる2個の画素の画素値を比較し比較結果を出力する比較工程と、
前記比較結果に基づいて、前記着目画素の特徴量を導出する導出工程と、
を含み、
前記比較工程では、2個の画素の画素値の比較をM回実行してM個の前記比較結果を出力し、第n回目(2≦n≦M)で比較する2個の画素は第(n−1)回目で比較した2個の画素の一方を含み、
前記導出工程では、前記比較工程により出力されたM個の前記比較結果を連結して前記着目画素の特徴量として導出する
ことを特徴とする画像処理装置の制御方法。 - コンピュータを、請求項1乃至7の何れか1項に記載の画像処理装置の各手段として機能させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017131487A JP2019016065A (ja) | 2017-07-04 | 2017-07-04 | 画像処理装置およびその制御方法 |
| US16/025,336 US20190012565A1 (en) | 2017-07-04 | 2018-07-02 | Image processing apparatus and method of controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017131487A JP2019016065A (ja) | 2017-07-04 | 2017-07-04 | 画像処理装置およびその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019016065A true JP2019016065A (ja) | 2019-01-31 |
| JP2019016065A5 JP2019016065A5 (ja) | 2020-08-13 |
Family
ID=64904259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017131487A Withdrawn JP2019016065A (ja) | 2017-07-04 | 2017-07-04 | 画像処理装置およびその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20190012565A1 (ja) |
| JP (1) | JP2019016065A (ja) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012120582A1 (ja) * | 2011-03-07 | 2012-09-13 | パナソニック株式会社 | 動き補償装置、動画像符号化装置、動画像復号装置、動き補償方法、プログラム、及び集積回路 |
| JP2012234257A (ja) * | 2011-04-28 | 2012-11-29 | Sony Corp | 画像処理装置と画像処理方法およびプログラム |
| WO2017056312A1 (ja) * | 2015-10-02 | 2017-04-06 | 富士通株式会社 | 画像処理プログラムおよび画像処理装置 |
-
2017
- 2017-07-04 JP JP2017131487A patent/JP2019016065A/ja not_active Withdrawn
-
2018
- 2018-07-02 US US16/025,336 patent/US20190012565A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20190012565A1 (en) | 2019-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11915119B2 (en) | Convolutional neural network (CNN) processing method and apparatus performing high speed and precision convolution operations | |
| CN106203376B (zh) | 人脸关键点定位方法及装置 | |
| JP6212111B2 (ja) | 特徴検出を実行し、特徴スコアを決定するためのシステムおよび方法 | |
| CN108021923B (zh) | 一种用于深度神经网络的图像特征提取方法 | |
| JP5388835B2 (ja) | 情報処理装置及び情報処理方法 | |
| JP6720664B2 (ja) | インデックス生成プログラム、インデックス生成装置、インデックス生成方法、検索プログラム、検索装置および検索方法 | |
| US11373098B2 (en) | Processing apparatus, learning apparatus, processing method, and nonvolatile recording medium | |
| CN106855952B (zh) | 基于神经网络的计算方法及装置 | |
| JP2021527263A5 (ja) | ||
| CN112396085B (zh) | 识别图像的方法和设备 | |
| JP6622369B1 (ja) | 訓練データを生成する方法、コンピュータおよびプログラム | |
| WO2010080857A2 (en) | Scalable media fingerprint extraction | |
| JP7011152B2 (ja) | 生体画像処理装置、生体画像処理方法、及び生体画像処理プログラム | |
| US9189693B2 (en) | Information processing apparatus and information processing method | |
| JP2019016065A (ja) | 画像処理装置およびその制御方法 | |
| US10949694B2 (en) | Method and apparatus for determining summation of pixel characteristics for rectangular region of digital image avoiding non-aligned loads using multiple copies of input data | |
| CN112906728B (zh) | 一种特征比对方法、装置及设备 | |
| JP2015041293A (ja) | 画像認識装置および画像認識方法 | |
| KR102018773B1 (ko) | Akbing을 이용한 영상의 객체 후보 검출 장치 및 방법 | |
| JP6987987B2 (ja) | メディア特徴の比較方法及び装置 | |
| US11853419B2 (en) | Apparatus and method for preventing side channel attack for NTRU LPRime algorithm | |
| TWI622286B (zh) | 幀分辨率決定方法以及使用該方法的裝置 | |
| CN116467684A (zh) | 仿冒应用识别方法、装置、计算机设备及存储介质 | |
| CN112598074A (zh) | 图像处理方法及装置、计算机可读存储介质和电子设备 | |
| JP6831307B2 (ja) | 解算出装置、解算出方法及び解算出プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200702 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200702 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210103 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210113 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20210121 |