JP2019053003A - データ処理装置、データ処理方法およびデータ処理用プログラム - Google Patents
データ処理装置、データ処理方法およびデータ処理用プログラム Download PDFInfo
- Publication number
- JP2019053003A JP2019053003A JP2017178831A JP2017178831A JP2019053003A JP 2019053003 A JP2019053003 A JP 2019053003A JP 2017178831 A JP2017178831 A JP 2017178831A JP 2017178831 A JP2017178831 A JP 2017178831A JP 2019053003 A JP2019053003 A JP 2019053003A
- Authority
- JP
- Japan
- Prior art keywords
- uav
- coordinate system
- laser
- data
- targets
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/933—Lidar systems specially adapted for specific applications for anti-collision purposes of aircraft or spacecraft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/66—Tracking systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/20—Arrangements for acquiring, generating, sharing or displaying traffic information
- G08G5/22—Arrangements for acquiring, generating, sharing or displaying traffic information located on the ground
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/50—Navigation or guidance aids
- G08G5/55—Navigation or guidance aids for a single aircraft
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/50—Navigation or guidance aids
- G08G5/57—Navigation or guidance aids for unmanned aircraft
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/70—Arrangements for monitoring traffic-related situations or conditions
- G08G5/72—Arrangements for monitoring traffic-related situations or conditions for monitoring traffic
- G08G5/727—Arrangements for monitoring traffic-related situations or conditions for monitoring traffic from a ground station
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/10—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS]
- B64U2201/104—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS] using satellite radio beacon positioning systems, e.g. GPS
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Aviation & Aerospace Engineering (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description
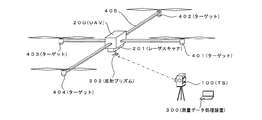
本実施形態の概要を図1に示す。図1には、飛行するUAV200、UAV200の追跡しつつその測位を行うTS(トータルステーション)100が示されている。図1には、UAV200にレーザースキャナ201を搭載し、UAV200を飛行させながら地上や建築物等の対象物のレーザースキャンを行い、当該対象物の三次元レーザースキャン点群(点群データ)を得る状態が示されている。
以下、レーザースキャナ201が得たレーザースキャンデータの座標を、TS100を原点とした地上座標系における座標に座標変換する原理について説明する。この処理では、UAV200の位置の特定、UAV200の姿勢の特定、UAV200に固定された座標系の地上座標系への座標変換が行われる。以下、各処理について説明する。
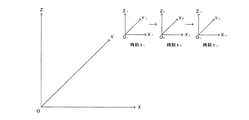
飛行するUAV200の位置(空中での三次元位置)は、TS100によりリアルタイムに特定され、その位置座標は、図2のXYZ座標系(地上座標系)上で記述される。TS100によるUAV200の追跡と測位は、UAV200に搭載された反射プリズム202をTS100のターゲット追跡機能を用いて追跡し、またTS100の測位機能により測位(三次元位置の特定)することで行われる。TS100のターゲット(反射プリズム)の追跡機能と測位機能については後述する。
UAV200は、識別可能な3つ以上の反射ターゲットを備え、この3つ以上の反射ターゲットの位置をTS100が装備するレーザースキャナ112の機能によって特定することで、UAV200の姿勢が算出される。
図2には、地上座標系であるXYZ座標系が示されている。XYZ座標系は、地上に固定されたTS100の位置を原点Oとする三次元直交直線座標系である。XYZ座標系における各座標軸の方向の設定は任意であるが、例えばZ軸を鉛直上方の方向、Y軸を北の方向、X軸を東の方向に設定する態様が挙げられる。
以下、UAV200に固定されたX1Y1Z1座標系、X2Y2Z2座標系、・・・・XnYnZn座標系(n=1,2,3・・・)を地上座標系であるXYZ座標系に統合し、飛行するUAV200から得たレーザースキャンデータを地上座標系XYZ上で記述する処理について説明する。
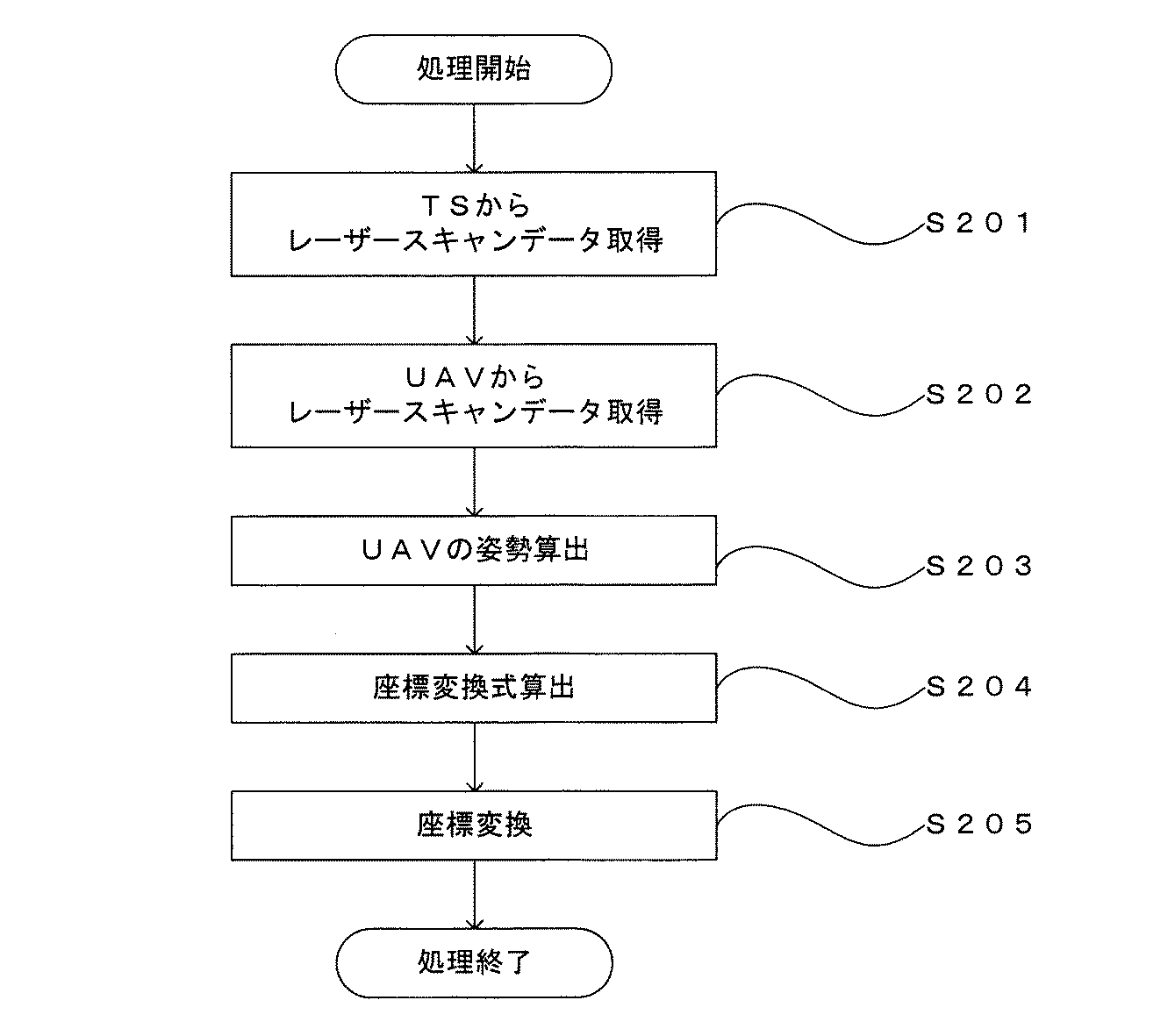
図3に図1に示すTS100のブロック図が示されている。TS100は、GNSSを用いた位置測定装置、画像を取得するカメラ、ターゲット(UAV200の反射プリズム202)を探索し、追尾する追尾レーザースキャン機能、測距用レーザー光を用いてターゲット(反射プリズム202)までの距離を測距するレーザー測距機能、レーザー測距されたターゲットの方向(水平角と垂直角(仰角または俯角))を計測する機能、ターゲットまでの距離と方向からターゲットの三次元位置を算出する機能、外部の機器との間で通信を行う機能、点群データを得るためのレーザースキャン機能を有する。
図4は、測量データ処理装置300のブロック図である。測量データ処理装置300は、図2に関連して説明した原理に基づき、UAV200が得たレーザースキャンデータを地上座標系に座標変換する処理を行う。測量データ処理装置300における処理を行うことで、飛行するUAV200から得たレーザースキャンデータに基づく三次元モデルを作成することができる。また、上記の座標変換の前段階の処理として、各時刻におけるUAV200の姿勢を算出する処理を測量データ処理装置300は行う。
以下、UAV200(レーザスキャナ201)の外部標定要素の取得、およびUAV座標系から地上座標系への座標変換に係る処理の一例を説明する。
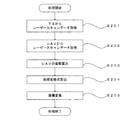
以下、UAV200の外部標定要素(位置と姿勢)を取得する処理手順の一例を図5のフローチャートに沿って説明する。図5の処理を実行に必要なプログラムは、適当な記憶領域や記憶媒体に記憶され、そこから読み出されて実行される。これは、図6の処理についても同じである。
以下、UAV200から取得したレーザースキャン点群を地上座標系に変換する処理手順の一例を図6のフローチャートに沿って説明する。まず、レーザースキャンデータ1取得部301にて、TS100のレーザースキャナ112が得たレーザースキャンデータを取得する(ステップS201)。一方で、レーザースキャンデータ2取得部302は、UAV200のレーザースキャナ201が得たレーザースキャンデータを取得する(ステップS202)。
TS100のターゲット追跡機能およびターゲット測位機能を用いて飛行するUAV200の追跡と測位を行い、同時にTS100のレーザースキャン機能によりUAV200のレーザースキャンを行い、UAV200の姿勢を特定する。この態様によれば、UAV200追跡と同時にUAV200の外部標定要素(位置と姿勢)を高い精度で求めることができる。また、UAV200の外部標定要素が判ることでUAV200に搭載したレーザースキャナ201によるレーザースキャンデータを地上座標系の座標変換し、地上座標系での三次元モデル化が可能となる。
ターゲット401〜404を識別する方法として、色情報を利用することもできる。レーザースキャンでは、得られた点群データ(スキャン点群)にカメラが撮影した画像から得られた色データを配色し、各点に色データを付与することができる。このスキャン点群各点の色情報を利用し、ターゲット401〜404の識別を行ってもよい。この場合、予めターゲット401〜404を異なる色に設定しておき、スキャン点群の色データの違いからターゲット401〜404の識別を行う。また、曲率半径と色の違いの両方を用いてターゲットの識別を行う方法も可能である。
UAV姿勢算出部305におけるUAV200の姿勢を算出する方法として以下の方法もある。この方法では、ターゲット401〜404の少なくとも2つの位置と反射プリズム202の位置とからUAV200の姿勢を求める。この場合、ターゲット401〜404と反射プリズム202のUAV200における位置とその相対位置関係は予めして取得しておく。
ターゲット401〜404として反射プリズムを用いる形態も可能である。この場合、各反射プリズムは色付きガラスや蛍光ガラスを用いて構成し、異なる波長の反射特性を有する設定とする。また、TS100のレーザースキャナの受光部は、光学フィルタによって各ターゲットからの異なる波長の反射光を選別して検出できる形態とする。また、ターゲット401〜404と反射プリズム202の反射光が区別できるように、ターゲット401〜404における各反射光の波長と、測距部103で用いる測距光の波長との関係を調整しておく。
UAV200の姿勢を示す反射形状を有する反射部を配置し、この反射部のレーザースキャンデータからUAV200の姿勢を検出する形態も可能である。この場合、当該反射部をレーザースキャンによって他の部分から識別できる反射特性の部材で構成する(塗装や表面処理でもよい)。UAV200の姿勢を示す反射形状としては、矢印、三角形等の形状の方向が判別し易い形状が挙げられる。この技術については、例えば特願2017−137832号に記載された内容が参考となる。
TS100は、カメラ101によってUAV200を捕捉し、撮影する機能を有する。この画像の解析結果をUAV200の姿勢を算出に利用することもできる。
UAV200の姿勢をTS100の側で検出する方法として、UAV200の形状そのものを利用する形態も可能である。例えば、図1のUAV200は、本体中央部から四方に十字状のアーム405が伸び、その先端にモータとプロペラが配された構造を有している。この十字型のフレーム構造をレーザースキャン点群から取得し、UAV200の水平面からの傾きを検出する。
TS100の側でUAV200の姿勢を算出する他の例を説明する。この例で説明する処理は、測量データ処理装置300のUAV姿勢算出部305で行われる。
以上説明したUAV200の姿勢を求める方法の複数を組み合わせて用いることもできる。本明細書で開示する技術は、IMUを用いる以外の方法でUAVの姿勢を計測できる技術であるが、UAVへのIMUの搭載を排除するものではない。よって、本明細書で開示する技術を用いたUAVの姿勢を計測する技術と、UAVに搭載したIMUによるUAVの姿勢を計測する技術とを組み合わせて利用することも可能である。
Claims (11)
- 飛行する航空機に第1の座標系に固定されたレーザースキャナからレーザースキャン光を照射することで得られたレーザースキャンデータを取得するレーザースキャンデータ取得部と、
前記レーザースキャンデータに基づき、前記飛行する前記航空機の前記第1の座標系での姿勢を算出する姿勢算出部と
を備え、
前記姿勢は、前記レーザースキャンデータに基づき特定された前記航空機における複数の位置に基づいて算出されるデータ処理装置。 - 前記航空機は識別可能な複数のターゲットを備え、
前記レーザースキャンデータは、前記航空機が備えた識別可能な複数のターゲットを対象としたレーザースキャンにより得られる請求項1に記載のデータ処理装置。 - 前記複数のターゲットの識別がターゲットの大きさの違いに基づいて行われる請求項2に記載のデータ処理装置。
- 前記複数のターゲットは曲面の反射面を有し、
前記複数のターゲットの識別が前記曲面の曲率半径の違いに基づいて行われる請求項2または3に記載のデータ処理装置。 - 前記複数のターゲットの位置の特定が前記曲面の曲率中心を求めることで行われる請求項2〜4の何れか一項に記載のデータ処理装置。
- 前記複数のターゲットの識別がターゲット表面の色の違いに基づいて行われる請求項2〜5の何れか一項に記載のデータ処理装置。
- 前記第1の座標系における前記航空機の位置のデータを取得する位置データ取得部によって取得される前記航空機の位置に基づき、
前記複数のターゲットに含まれる2以上のターゲットが含まれる範囲をレーザースキャン範囲として設定するスキャン範囲設定部を備える請求項2〜6のいずれか一項に記載のデータ処理装置。 - 前記第1の座標系における前記航空機の位置のデータを取得する位置データ取得部を備え、
前記第1の座標系における前記航空機の位置と前記複数のターゲットに含まれる2以上のターゲットの位置とに基づいて前記姿勢が算出される請求項2〜7の何れか一項に記載のデータ処理装置。 - 前記姿勢を算出は、前記航空機から反射したレーザースキャンデータに基づいて行われる請求項1〜8のいずれか一項に記載のデータ処理装置。
- 飛行する航空機に第1の座標系に固定されたレーザースキャナからレーザースキャン光を照射しレーザースキャンデータを取得するレーザースキャンデータ取得ステップと、
前記レーザースキャンデータに基づき、前記飛行する前記航空機の前記第1の座標系での姿勢を算出する姿勢算出ステップと
を備え、
前記姿勢は、前記レーザースキャンデータに基づき特定された前記航空機における複数の位置に基づいて算出されるデータ処理方法。 - コンピュータに読み取らせて実行させるプログラムであって、
コンピュータを
飛行する航空機に第1の座標系に固定されたレーザースキャナからレーザースキャン光を照射することで得られたレーザースキャンデータを取得するレーザースキャンデータ取得部と、
前記レーザースキャンデータに基づき、前記飛行する前記航空機の前記第1の座標系での姿勢を算出する姿勢算出部と
を備え、
前記姿勢は、前記レーザースキャンデータに基づき特定された前記航空機における複数の位置に基づいて算出されるデータ処理装置として機能させるためのデータ処理用プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017178831A JP7025156B2 (ja) | 2017-09-19 | 2017-09-19 | データ処理装置、データ処理方法およびデータ処理用プログラム |
| US16/129,960 US10969493B2 (en) | 2017-09-19 | 2018-09-13 | Data processing device, data processing method, and data processing program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017178831A JP7025156B2 (ja) | 2017-09-19 | 2017-09-19 | データ処理装置、データ処理方法およびデータ処理用プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019053003A true JP2019053003A (ja) | 2019-04-04 |
| JP7025156B2 JP7025156B2 (ja) | 2022-02-24 |
Family
ID=65720060
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017178831A Active JP7025156B2 (ja) | 2017-09-19 | 2017-09-19 | データ処理装置、データ処理方法およびデータ処理用プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10969493B2 (ja) |
| JP (1) | JP7025156B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2021112158A1 (ja) * | 2019-03-29 | 2021-06-10 | ||
| JP2021089246A (ja) * | 2019-12-06 | 2021-06-10 | 三菱電機株式会社 | アライメント測定システム、情報処理装置、アライメント測定方法及びプログラム |
| JP2021528647A (ja) * | 2018-06-22 | 2021-10-21 | サウスウェスト リサーチ インスティテュート | 位置測定システム及び方法 |
| JP2022149716A (ja) * | 2021-03-25 | 2022-10-07 | 株式会社トプコン | 測量システム |
| WO2024214697A1 (ja) * | 2023-04-11 | 2024-10-17 | 株式会社トプコン | 測量システム |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7313998B2 (ja) | 2019-09-18 | 2023-07-25 | 株式会社トプコン | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
| CN111811339B (zh) * | 2020-06-15 | 2021-07-13 | 北京理工大学 | 利用地面激光指示器的飞行器激光制导控制系统及方法 |
| CN112083434B (zh) * | 2020-09-09 | 2023-12-29 | 上海有个机器人有限公司 | 一种基于激光的机器人检测方法以及装置 |
| CN112379390B (zh) * | 2020-11-18 | 2024-09-27 | 成都通甲优博科技有限责任公司 | 基于异源数据的位姿测量方法、装置、系统及电子设备 |
| CN113419251B (zh) * | 2021-05-17 | 2023-07-18 | 重庆大学 | 基于激光反射的姿态识别、编解码及通信方法 |
| CN113739773B (zh) * | 2021-09-08 | 2024-06-07 | 西安应用光学研究所 | 一种适用于小型飞行器光电系统高效扫描方法 |
| CN114526634A (zh) * | 2022-02-22 | 2022-05-24 | 哈尔滨工业大学 | 一种连续波半主动激光导引头系统 |
| CN115424046B (zh) * | 2022-08-31 | 2026-02-10 | 云南电网有限责任公司电力科学研究院 | 无人机群的航迹追踪方法、装置、设备和介质 |
| CN120194609B (zh) * | 2025-03-20 | 2026-01-30 | 华中科技大学 | 一种基于六维传感器的大型构件测量系统及其标定方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4047816A (en) * | 1976-06-18 | 1977-09-13 | The United States Of America As Represented By The Secretary Of The Army | Attitude determination using two transmitter/receiver stations and skewed reflectors |
| US4964722A (en) * | 1988-08-29 | 1990-10-23 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Remote object configuration/orientation determination |
| JPH05170191A (ja) * | 1991-12-19 | 1993-07-09 | Mitsubishi Heavy Ind Ltd | 着船誘導センサー・システム |
| JP2000171559A (ja) * | 1998-12-07 | 2000-06-23 | Nec Corp | 航空機追尾計測方法及びシステム |
| JP2000227309A (ja) * | 1999-02-04 | 2000-08-15 | Olympus Optical Co Ltd | 3次元位置姿勢センシング装置 |
| JP2006242943A (ja) * | 2005-02-04 | 2006-09-14 | Canon Inc | 位置姿勢計測方法及び装置 |
| JP2006284385A (ja) * | 2005-03-31 | 2006-10-19 | Nec Toshiba Space Systems Ltd | Gps衛星用基準局システム |
| JP2012053004A (ja) * | 2010-09-03 | 2012-03-15 | Ihi Corp | 3次元点群の合成方法 |
| JP2017144784A (ja) * | 2016-02-15 | 2017-08-24 | 株式会社トプコン | 飛行計画作成方法及び飛行体誘導システム |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5124319B2 (ja) | 1972-11-11 | 1976-07-23 | ||
| JPS5686407A (en) | 1979-12-15 | 1981-07-14 | Nitto Electric Ind Co | Transparent conductive film and method of manufacturing same |
| US4735508A (en) * | 1986-06-02 | 1988-04-05 | Honeywell Inc. | Method and apparatus for measuring a curvature of a reflective surface |
| WO2008008970A2 (en) | 2006-07-13 | 2008-01-17 | Velodyne Acoustics, Inc | High definition lidar system |
| JP5263804B2 (ja) | 2007-04-20 | 2013-08-14 | 株式会社トプコン | 多点測定方法及び測量装置 |
| JP5124319B2 (ja) | 2008-03-21 | 2013-01-23 | 株式会社トプコン | 測量機、測量システム、測定対象の検出方法、および測定対象の検出プログラム |
| JP5688876B2 (ja) | 2008-12-25 | 2015-03-25 | 株式会社トプコン | レーザスキャナ測定システムの較正方法 |
| US8386095B2 (en) | 2009-04-02 | 2013-02-26 | Honeywell International Inc. | Performing corrective action on unmanned aerial vehicle using one axis of three-axis magnetometer |
| WO2011070927A1 (ja) | 2009-12-11 | 2011-06-16 | 株式会社トプコン | 点群データ処理装置、点群データ処理方法、および点群データ処理プログラム |
| EP2388615B1 (en) | 2010-05-17 | 2020-03-18 | Velodyne LiDAR, Inc. | High definition lidar system |
| JP5725922B2 (ja) | 2011-03-25 | 2015-05-27 | 株式会社トプコン | 測量システム及びこの測量システムに用いる測量用ポール及びこの測量システムに用いる携帯型無線送受信装置 |
| JP5711039B2 (ja) | 2011-04-27 | 2015-04-30 | 株式会社トプコン | 三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム |
| JP5963353B2 (ja) | 2012-08-09 | 2016-08-03 | 株式会社トプコン | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
| US9111444B2 (en) * | 2012-10-31 | 2015-08-18 | Raytheon Company | Video and lidar target detection and tracking system and method for segmenting moving targets |
| US10132928B2 (en) | 2013-05-09 | 2018-11-20 | Quanergy Systems, Inc. | Solid state optical phased array lidar and method of using same |
| US9613539B1 (en) * | 2014-08-19 | 2017-04-04 | Amazon Technologies, Inc. | Damage avoidance system for unmanned aerial vehicle |
| KR20180026470A (ko) * | 2015-07-29 | 2018-03-12 | 퀄컴 인코포레이티드 | 안테나들의 어레이들을 이용한 각도 및 위치 감지 |
| US10082803B2 (en) * | 2016-02-29 | 2018-09-25 | Thinkware Corporation | Method and system for providing route of unmanned air vehicle |
| US10101443B1 (en) * | 2016-12-02 | 2018-10-16 | Amazon Technologies, Inc. | Airframe-embedded ultrasonic transducers |
| JP6773573B2 (ja) | 2017-01-25 | 2020-10-21 | 株式会社トプコン | 位置特定装置、位置特定方法、位置特定システム、位置特定用プログラム、無人航空機および無人航空機識別用ターゲット |
-
2017
- 2017-09-19 JP JP2017178831A patent/JP7025156B2/ja active Active
-
2018
- 2018-09-13 US US16/129,960 patent/US10969493B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4047816A (en) * | 1976-06-18 | 1977-09-13 | The United States Of America As Represented By The Secretary Of The Army | Attitude determination using two transmitter/receiver stations and skewed reflectors |
| US4964722A (en) * | 1988-08-29 | 1990-10-23 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Remote object configuration/orientation determination |
| JPH05170191A (ja) * | 1991-12-19 | 1993-07-09 | Mitsubishi Heavy Ind Ltd | 着船誘導センサー・システム |
| JP2000171559A (ja) * | 1998-12-07 | 2000-06-23 | Nec Corp | 航空機追尾計測方法及びシステム |
| JP2000227309A (ja) * | 1999-02-04 | 2000-08-15 | Olympus Optical Co Ltd | 3次元位置姿勢センシング装置 |
| JP2006242943A (ja) * | 2005-02-04 | 2006-09-14 | Canon Inc | 位置姿勢計測方法及び装置 |
| JP2006284385A (ja) * | 2005-03-31 | 2006-10-19 | Nec Toshiba Space Systems Ltd | Gps衛星用基準局システム |
| JP2012053004A (ja) * | 2010-09-03 | 2012-03-15 | Ihi Corp | 3次元点群の合成方法 |
| JP2017144784A (ja) * | 2016-02-15 | 2017-08-24 | 株式会社トプコン | 飛行計画作成方法及び飛行体誘導システム |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021528647A (ja) * | 2018-06-22 | 2021-10-21 | サウスウェスト リサーチ インスティテュート | 位置測定システム及び方法 |
| JP7364171B2 (ja) | 2018-06-22 | 2023-10-18 | サウスウェスト リサーチ インスティテュート | 位置測定システム及び方法 |
| JPWO2021112158A1 (ja) * | 2019-03-29 | 2021-06-10 | ||
| JP7627231B2 (ja) | 2019-03-29 | 2025-02-05 | 株式会社トプコン | 無人飛行機の飛行制御システム及び地形計測システム |
| JP2021089246A (ja) * | 2019-12-06 | 2021-06-10 | 三菱電機株式会社 | アライメント測定システム、情報処理装置、アライメント測定方法及びプログラム |
| JP7345377B2 (ja) | 2019-12-06 | 2023-09-15 | 三菱電機株式会社 | アライメント測定システム、情報処理装置、アライメント測定方法及びプログラム |
| JP2022149716A (ja) * | 2021-03-25 | 2022-10-07 | 株式会社トプコン | 測量システム |
| WO2024214697A1 (ja) * | 2023-04-11 | 2024-10-17 | 株式会社トプコン | 測量システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190086548A1 (en) | 2019-03-21 |
| US10969493B2 (en) | 2021-04-06 |
| JP7025156B2 (ja) | 2022-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7025156B2 (ja) | データ処理装置、データ処理方法およびデータ処理用プログラム | |
| JP7297017B2 (ja) | オンボードセンサの外部パラメータを較正する方法及び装置、並びに関連する車両 | |
| US10234278B2 (en) | Aerial device having a three-dimensional measurement device | |
| US20190079522A1 (en) | Unmanned aerial vehicle having a projector and being tracked by a laser tracker | |
| US8583296B2 (en) | Low-altitude altimeter and method | |
| JP6884003B2 (ja) | 無人航空機の追跡装置、無人航空機の追跡方法、無人航空機の追跡システムおよびプログラム | |
| JP7007137B2 (ja) | 情報処理装置、情報処理方法および情報処理用プログラム | |
| US10527423B1 (en) | Fusion of vision and depth sensors for navigation in complex environments | |
| JP6745169B2 (ja) | レーザ計測システム及びレーザ計測方法 | |
| US20210229810A1 (en) | Information processing device, flight control method, and flight control system | |
| JP2016080572A (ja) | レーザ計測システム | |
| JP7254934B2 (ja) | 森林計測を行う方法、森林計測システムおよびコンピュータプログラム | |
| JP6773573B2 (ja) | 位置特定装置、位置特定方法、位置特定システム、位置特定用プログラム、無人航空機および無人航空機識別用ターゲット | |
| CN108459615B (zh) | 控制装置、光学装置、控制方法、追踪系统和存储介质 | |
| JP6934367B2 (ja) | 位置測定装置、位置測定方法および位置測定用プログラム | |
| EP3757512B1 (en) | Aircraft imaging system using projected patterns on featureless surfaces | |
| US20160299229A1 (en) | Method and system for detecting objects | |
| US20180172833A1 (en) | Laser repeater | |
| WO2022256976A1 (zh) | 稠密点云真值数据的构建方法、系统和电子设备 | |
| CN111854748A (zh) | 一种定位系统和方法 | |
| JPH10318743A (ja) | 飛行体を用いた測量方法及びその装置 | |
| WO2018088991A1 (en) | Lidar system providing a conic scan | |
| CN117031482A (zh) | 一种机场净空障碍物高度判别装置及方法 | |
| KR101181742B1 (ko) | 토지 이용 현황도 갱신 장치 및 방법 | |
| CN113899356A (zh) | 一种非接触式移动测量系统及方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200916 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210608 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210806 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7025156 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |