JP2019057199A - 画像処理プログラム、画像処理方法、及び画像処理装置 - Google Patents
画像処理プログラム、画像処理方法、及び画像処理装置 Download PDFInfo
- Publication number
- JP2019057199A JP2019057199A JP2017182189A JP2017182189A JP2019057199A JP 2019057199 A JP2019057199 A JP 2019057199A JP 2017182189 A JP2017182189 A JP 2017182189A JP 2017182189 A JP2017182189 A JP 2017182189A JP 2019057199 A JP2019057199 A JP 2019057199A
- Authority
- JP
- Japan
- Prior art keywords
- image
- subject
- spatial frequency
- image processing
- imaging device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
- G06F1/1686—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being an integrated camera
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F21/00—Security arrangements for protecting computers, components thereof, programs or data against unauthorised activity
- G06F21/30—Authentication, i.e. establishing the identity or authorisation of security principals
- G06F21/31—User authentication
- G06F21/32—User authentication using biometric data, e.g. fingerprints, iris scans or voiceprints
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/24—Aligning, centring, orientation detection or correction of the image
- G06V10/243—Aligning, centring, orientation detection or correction of the image by compensating for image skew or non-uniform image deformations
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/107—Static hand or arm
- G06V40/11—Hand-related biometrics; Hand pose recognition
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/12—Fingerprints or palmprints
- G06V40/13—Sensors therefor
- G06V40/1312—Sensors therefor direct reading, e.g. contactless acquisition
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/12—Fingerprints or palmprints
- G06V40/13—Sensors therefor
- G06V40/1318—Sensors therefor using electro-optical elements or layers, e.g. electroluminescent sensing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/14—Vascular patterns
- G06V40/145—Sensors therefor
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/161—Detection; Localisation; Normalisation
- G06V40/162—Detection; Localisation; Normalisation using pixel segmentation or colour matching
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/60—Static or dynamic means for assisting the user to position a body part for biometric acquisition
- G06V40/67—Static or dynamic means for assisting the user to position a body part for biometric acquisition by interactive indications to the user
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Computer Security & Cryptography (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Software Systems (AREA)
- Vascular Medicine (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Collating Specific Patterns (AREA)
- Image Input (AREA)
- Image Analysis (AREA)
Abstract
Description
11:制御装置
12:記憶装置
13:表示装置
14:撮像装置
15:照明装置
16:入力装置
17:システムバス
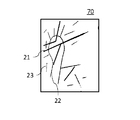
20,40,70:画像
21:掌紋
22:静脈
23:細かい皺
30,50,90a,90b:パワースペクトル画像
80a,80b:分割画像
100:手のひら
101:親指
Claims (10)
- 撮像装置により被写体が撮像された撮像画像を取得し、
前記撮像画像に含まれる複数の領域のそれぞれに基づいて、複数の空間周波数特性を算出し、
算出された前記複数の空間周波数特性に応じて、前記撮像装置に対する前記被写体の姿勢を判定する、
処理をコンピュータに実行させることを特徴とする画像処理プログラム。 - 前記判定の処理において、前記被写体の姿勢が適正であると判定された場合、前記撮像画像と記憶部に記憶された登録画像との照合処理を実行する、
ことを特徴とする請求項1に記載の画像処理プログラム。 - 前記被写体の姿勢は、前記撮像装置に対する前記被写体の傾きである、
ことを特徴とする請求項1に記載の画像処理プログラム。 - 前記被写体は、手のひらである、
ことを特徴とする請求項1に記載の画像処理プログラム。 - 前記複数の領域は、前記撮像画像の右側領域と左側領域、及び/又は、前記撮像画像の上側領域と下側領域を含む、
ことを特徴とする請求項1に記載の画像処理プログラム。 - 前記判定する処理は、前記複数の空間周波数特性を比較し、所定の範囲の空間周波数の成分の差分が閾値以上である場合、前記複数の領域のうち、前記所定の範囲の空間周波数の成分が少ない空間周波数特性に対応する特定の領域に対応する前記被写体の部分が、前記被写体の他の部分より前記撮像装置に近いと判定する処理を含む、
ことを特徴とする請求項1に記載の画像処理プログラム。 - 前記所定の範囲の空間周波数の成分の差分は、前記複数の空間周波数特性のそれぞれの前記所定の範囲の空間周波数の成分の平均値の差分である、
ことを特徴とする請求項5に記載の画像処理プログラム。 - 前記複数の空間周波数特性のそれぞれの前記所定の範囲の周波数の成分の平均値は、前記複数の空間周波数特性のそれぞれを、中心に近いほど低周波の成分が配置され周囲に広がるほど高周波の成分が配置されるパワースペクトル画像として表現した場合の、前記パワースペクトル画像のそれぞれにおける中心から所定の距離を有する特定の範囲に含まれる成分の平均値である、
ことを特徴とする請求項7に記載の画像処理プログラム。 - 撮像装置により被写体が撮像された撮像画像を取得し、
前記撮像画像に含まれる複数の領域のそれぞれに基づいて、複数の空間周波数特性を算出し、
算出された前記複数の空間周波数特性に応じて、前記撮像装置に対する前記被写体の姿勢を判定する、
処理をコンピュータが実行することを特徴とする画像処理方法。 - 撮像装置と、
前記撮像装置により被写体が撮像された撮像画像を取得し、前記撮像画像に含まれる複数の領域のそれぞれに基づいて、複数の空間周波数特性を算出し、算出された前記複数の空間周波数特性に応じて、前記撮像装置に対する前記被写体の姿勢を判定する、処理を実行する制御装置と、
を有することを特徴とする画像処理装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017182189A JP7056052B2 (ja) | 2017-09-22 | 2017-09-22 | 画像処理プログラム、画像処理方法、及び画像処理装置 |
| EP18194752.4A EP3460716A1 (en) | 2017-09-22 | 2018-09-17 | Image processing apparatus and image processing method |
| US16/135,058 US10867153B2 (en) | 2017-09-22 | 2018-09-19 | Image processing apparatus and image processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017182189A JP7056052B2 (ja) | 2017-09-22 | 2017-09-22 | 画像処理プログラム、画像処理方法、及び画像処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019057199A true JP2019057199A (ja) | 2019-04-11 |
| JP7056052B2 JP7056052B2 (ja) | 2022-04-19 |
Family
ID=63787691
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017182189A Expired - Fee Related JP7056052B2 (ja) | 2017-09-22 | 2017-09-22 | 画像処理プログラム、画像処理方法、及び画像処理装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10867153B2 (ja) |
| EP (1) | EP3460716A1 (ja) |
| JP (1) | JP7056052B2 (ja) |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6813377B1 (en) * | 1999-08-06 | 2004-11-02 | Cognex Corporation | Methods and apparatuses for generating a model of an object from an image of the object |
| JP2005115548A (ja) | 2003-10-06 | 2005-04-28 | Nippon Telegr & Teleph Corp <Ntt> | 画像処理装置,画像処理方法,画像処理プログラムおよびそのプログラムを記録した記録媒体 |
| EP1779064A4 (en) * | 2004-08-09 | 2009-11-04 | Classifeye Ltd | CONTACTLESS OPTICAL MEANS AND METHOD FOR 3D FINGERPRINT RECOGNITION |
| JP5326792B2 (ja) * | 2009-05-14 | 2013-10-30 | ソニー株式会社 | 静脈撮像装置、位置ズレ補間方法およびプログラム |
| US8938099B2 (en) * | 2010-12-15 | 2015-01-20 | Canon Kabushiki Kaisha | Image processing apparatus, method of controlling the same, distance measurement apparatus, and storage medium |
| BR112013020468A2 (pt) * | 2011-02-15 | 2016-10-18 | Fujitsu Frontech Ltd | aparelho de autenticação, programa de autenticação, e método de autenticação |
| JP5691669B2 (ja) * | 2011-03-08 | 2015-04-01 | 富士通株式会社 | 生体情報処理装置、生体情報処理方法、および生体情報処理プログラム |
| WO2012127630A1 (ja) * | 2011-03-22 | 2012-09-27 | 富士通株式会社 | 生体認証システム、生体認証方法及び生体認証プログラム |
| JP6429444B2 (ja) | 2013-10-02 | 2018-11-28 | キヤノン株式会社 | 画像処理装置、撮像装置及び画像処理方法 |
| JP6369078B2 (ja) * | 2014-03-20 | 2018-08-08 | 富士通株式会社 | 画像補正装置、画像補正方法及び画像補正用コンピュータプログラム |
| US9210306B1 (en) * | 2014-05-31 | 2015-12-08 | Apple Inc. | Method and system for a single frame camera module active alignment tilt correction |
| KR20160027852A (ko) * | 2014-09-02 | 2016-03-10 | 삼성전기주식회사 | 렌즈의 틸트각 측정 및 보정 시스템 및 그 방법 |
| CN107133557B (zh) * | 2017-03-08 | 2019-12-31 | 天地融科技股份有限公司 | 一种掌纹识别辅助方法、装置和系统 |
-
2017
- 2017-09-22 JP JP2017182189A patent/JP7056052B2/ja not_active Expired - Fee Related
-
2018
- 2018-09-17 EP EP18194752.4A patent/EP3460716A1/en not_active Withdrawn
- 2018-09-19 US US16/135,058 patent/US10867153B2/en not_active Expired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| 望月 優介, 青木 公也: "焦点ぼけを利用した単眼視計測による表面形状再構築", FIT2007第6回情報科学技術フォーラム, vol. 一般講演論文集 第3分冊, JPN6021030189, 22 August 2007 (2007-08-22), JP, pages 339 - 340, ISSN: 0004566431 * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3460716A1 (en) | 2019-03-27 |
| US20190095675A1 (en) | 2019-03-28 |
| US10867153B2 (en) | 2020-12-15 |
| JP7056052B2 (ja) | 2022-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12067095B2 (en) | Biometric authentication system, biometric authentication method, and storage medium | |
| JP5747916B2 (ja) | 生体認証装置および生体認証プログラム | |
| US10896250B2 (en) | Biometric authentication apparatus and biometric authentication method | |
| US20180173863A1 (en) | Biometric authentication of a user | |
| JP2016081116A (ja) | 生体情報補正装置、生体情報補正方法及び生体情報補正用コンピュータプログラム | |
| US20170091521A1 (en) | Secure visual feedback for fingerprint sensing | |
| JP5846291B2 (ja) | 生体認証装置、生体認証方法、および生体認証プログラム | |
| US20230359717A1 (en) | Biometric authentication system, authentication terminal, and authentication method | |
| JP5751019B2 (ja) | 生体情報処理装置、生体情報処理方法、および生体情報処理プログラム | |
| JP2018026012A (ja) | 手のひら検知装置、掌紋認証装置、手のひら検知方法、及びプログラム | |
| KR102205495B1 (ko) | 지문 인식 방법 및 장치 | |
| JP7190987B2 (ja) | 情報処理システム、および情報処理方法 | |
| US11507646B1 (en) | User authentication using video analysis | |
| JP7056052B2 (ja) | 画像処理プログラム、画像処理方法、及び画像処理装置 | |
| WO2018207571A1 (ja) | 認証情報処理プログラム及び認証情報処理装置 | |
| KR20190069028A (ko) | 착용형 디스플레이 장비에서의 눈 영상 기반 생체 인증 장치 및 방법 | |
| US10643317B2 (en) | Biometric image processing device, biometric image processing method and computer-readable non-transitory medium | |
| JP6798285B2 (ja) | 生体認証装置、生体認証方法及びプログラム | |
| WO2021162682A1 (en) | Fingerprint sensors with reduced-illumination patterns | |
| KR20210050649A (ko) | 모바일 기기의 페이스 인증 방법 | |
| JP4900701B2 (ja) | 認証システム | |
| TWI650712B (zh) | 指紋擷取方法及指紋擷取模組 | |
| US20200285724A1 (en) | Biometric authentication device, biometric authentication system, and computer program product | |
| JP2020102014A (ja) | 生体認証装置、生体認証プログラム、及び生体認証方法 | |
| US20200285874A1 (en) | Biometric authentication device and computer program product |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20180528 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200611 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210728 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210810 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211005 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220321 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7056052 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |