JP2019058032A - 電動アクチュエータ - Google Patents
電動アクチュエータ Download PDFInfo
- Publication number
- JP2019058032A JP2019058032A JP2017182341A JP2017182341A JP2019058032A JP 2019058032 A JP2019058032 A JP 2019058032A JP 2017182341 A JP2017182341 A JP 2017182341A JP 2017182341 A JP2017182341 A JP 2017182341A JP 2019058032 A JP2019058032 A JP 2019058032A
- Authority
- JP
- Japan
- Prior art keywords
- input
- motor unit
- electric actuator
- reverse input
- clutch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H25/24—Elements essential to such mechanisms, e.g. screws, nuts
- F16H25/2454—Brakes; Rotational locks
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Braking Arrangements (AREA)
- Transmission Devices (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
Description
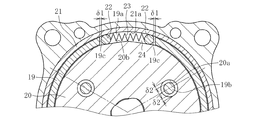
以下、図1及び図2を参照しつつ逆入力遮断クラッチ4の構成について説明する。
すなわち、逆入力遮断クラッチ4は、モータ部2のロータインナ6cと一体的に回転するように構成された入力部材19と、すべりねじ機構3のナット15と一体的に回転するように構成された出力部材20と、入力部材19と出力部材20の一方に設けられた孔部と、この孔部の縁に接触することにより入力部材19から出力部材20へ回転を伝達するように入力部材19と出力部材20の他方に設けられた凸部と、回転しないように固定された静止部材としての外輪21と、入力部材19に設けられたポケット19aと、ポケット19aに対応する部分で出力部材20の外周面に設けられたクラッチ面(カム面)20bと、外輪21の内周面21aと出力部材20のクラッチ面20bとの間に周方向の両端側で幅が小さくなるように形成された楔状隙間24と、楔状隙間24内に収容されたロック部材としての一対のローラ22と、一対のローラ22を互いに周方向に離反するように押圧するばね部材23とを有する。
以下、図6及び図7を参照しつつ減速機26の構成及び動作について詳しく説明する。
2 モータ部
3 すべりねじ機構(運動変換機構)
4 逆入力遮断クラッチ
14 ねじ軸
15 ナット
19 入力部材
20 出力部材
21 外輪(静止部材)
22 ローラ(ロック部材)
26 減速機
Claims (6)
- モータ部と、前記モータ部の回転運動を直線運動に変換する運動変換機構とを備える電動アクチュエータにおいて、
前記運動変換機構を、ねじ軸とこれに螺合するナットとを有するすべりねじ機構で構成し、
前記モータ部とは反対の出力側からの逆入力に対して前記すべりねじ機構の正逆両方向の回転を防止する逆入力遮断クラッチを設けたことを特徴とする電動アクチュエータ。 - 前記逆入力遮断クラッチは、
前記モータ部からの入力によって回転する入力部材と、
前記入力部材の回転に伴って回転してその回転力を前記すべりねじ機構へ出力する出力部材と、
回転しないように固定された静止部材と、
前記モータ部から入力される駆動時に、回転する前記入力部材によって前記静止部材と前記出力部材とに対する係合が解除されて前記出力部材の回転を許容し、前記モータ部から入力されない停止時に、前記静止部材と前記出力部材とに係合して前記出力部材の正逆両方向の回転を防止するロック部材とを有する請求項1に記載の電動アクチュエータ。 - 前記モータ部の回転運動を減速して伝達する減速機を備え、
前記逆入力遮断クラッチを、前記減速機よりも出力側に配置した請求項2に記載の電動アクチュエータ。 - 前記出力部材と前記すべりねじ機構のナットとを一体成型した請求項2又は3に記載の電動アクチュエータ。
- 前記すべりねじ機構のねじ軸とナットの少なくとも一方のねじ溝の表面を、摺動性樹脂で被覆した請求項1から4のいずれか1項に記載の電動アクチュエータ。
- 前記すべりねじ機構のねじ軸を、前記モータ部と前記逆入力遮断クラッチとの内径側に配置した請求項1から5のいずれか1項に記載の電動アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017182341A JP2019058032A (ja) | 2017-09-22 | 2017-09-22 | 電動アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017182341A JP2019058032A (ja) | 2017-09-22 | 2017-09-22 | 電動アクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019058032A true JP2019058032A (ja) | 2019-04-11 |
Family
ID=66107726
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017182341A Pending JP2019058032A (ja) | 2017-09-22 | 2017-09-22 | 電動アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019058032A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021037868A (ja) * | 2019-09-04 | 2021-03-11 | アイシン精機株式会社 | 車高調整装置 |
| WO2023248319A1 (ja) * | 2022-06-21 | 2023-12-28 | 三菱電機株式会社 | アクチュエータ |
-
2017
- 2017-09-22 JP JP2017182341A patent/JP2019058032A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021037868A (ja) * | 2019-09-04 | 2021-03-11 | アイシン精機株式会社 | 車高調整装置 |
| JP7348593B2 (ja) | 2019-09-04 | 2023-09-21 | 株式会社アイシン | 車高調整装置 |
| WO2023248319A1 (ja) * | 2022-06-21 | 2023-12-28 | 三菱電機株式会社 | アクチュエータ |
| JPWO2023248319A1 (ja) * | 2022-06-21 | 2023-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6937895B2 (ja) | ディスクブレーキ及び遊星歯車減速機構 | |
| JP6559349B2 (ja) | ディスクブレーキ | |
| JP6335443B2 (ja) | 電動式ブレーキ装置 | |
| CN103154556B (zh) | 电动式直动驱动器以及电动式盘形制动装置 | |
| CN115451035B (zh) | 断接器 | |
| JP6591986B2 (ja) | デュオサーボモードで動作する駐車ブレーキを含むドラムブレーキ装置、これに関連する車両および組み立て方法 | |
| JP5093476B2 (ja) | 電動ディスクブレーキ | |
| WO2013088901A1 (ja) | クラッチのアクチュエータ | |
| JP4304418B2 (ja) | 電動ディスクブレーキ | |
| WO2012124811A1 (ja) | パーキング機構付電動式ブレーキ装置 | |
| JP2019058032A (ja) | 電動アクチュエータ | |
| JP6517608B2 (ja) | フローティング型電動ディスクブレーキ装置 | |
| CN115807822A (zh) | 电子驻车制动器 | |
| JP2014101973A (ja) | 電動パーキングブレーキ装置 | |
| JP2007040343A (ja) | 電動リニアアクチュエータ | |
| JP2005133863A (ja) | 制動装置 | |
| CN104204608A (zh) | 传动装置,电机 | |
| JP2014211213A (ja) | 動力伝達装置 | |
| WO2014025010A1 (ja) | 電動式ディスクブレーキ装置 | |
| JP2018070111A (ja) | 電動ブレーキアクチュエータ | |
| JP4959639B2 (ja) | 電動ブレーキ装置 | |
| WO2019059355A1 (ja) | 電動アクチュエータ | |
| JP7398345B2 (ja) | ディスクブレーキ及び遊星歯車減速機構 | |
| CN221497970U (zh) | 制动驱动装置、制动器和车辆 | |
| CN116733867B (zh) | 一种电机轴制动装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200316 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201222 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210216 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210628 |