JP2019059471A - 作業車 - Google Patents
作業車 Download PDFInfo
- Publication number
- JP2019059471A JP2019059471A JP2018218723A JP2018218723A JP2019059471A JP 2019059471 A JP2019059471 A JP 2019059471A JP 2018218723 A JP2018218723 A JP 2018218723A JP 2018218723 A JP2018218723 A JP 2018218723A JP 2019059471 A JP2019059471 A JP 2019059471A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- cylinder
- steering cylinder
- angle sensor
- wheels
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000000126 substance Substances 0.000 claims abstract description 29
- 239000006185 dispersion Substances 0.000 claims abstract description 20
- 239000007921 spray Substances 0.000 claims description 11
- 238000005507 spraying Methods 0.000 claims description 9
- 239000007788 liquid Substances 0.000 claims description 2
- 238000003892 spreading Methods 0.000 claims description 2
- 239000000243 solution Substances 0.000 abstract description 17
- 239000008155 medical solution Substances 0.000 abstract description 3
- 230000005540 biological transmission Effects 0.000 description 7
- 238000004519 manufacturing process Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
Images







Landscapes
- Catching Or Destruction (AREA)
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
Abstract
【課題】薬液散布作業車において、四輪操舵装置をバランスよく配置して構成する。【解決手段】右前輪(3R)側に前操向シリンダー(28F)と右ナックルアーム(24R)の回動角度を検出する前操向角度センサ(33F)を配置し、左後輪(4L)側に後操向シリンダー(28R)と左ナックルアーム(24L)の回動角度を検出する後操向角度センサ(33R)を配置する構成とし、前操向シリンダー(28F)と後操向シリンダー(28R)は機体の中心に対して対角位置であり、前アクスルハウジング(30F)の上部に前操向角度センサ(33F)を設け、後アクスルハウジング(30R)の上部に後操向角度センサ(33R)を設けたことを特徴とする薬液散布作業車とする。【選択図】図6
Description
本発明は、薬液散布作業車に関する。
乗用管理機の操舵装置が、特開2014−12464号公報に記載されている。この操舵装置は、前後左右の四輪が操向可能に構成され、前輪操舵や四輪操舵等の操舵方法を変更出来るようにしている。その構成は、左右車輪のナックルアームを連結するタイロッドが車台の左右中央に設ける複動型の操舵シリンダーで分割連結され、該操舵シリンダーのシリンダーハウジングの左右中央がアクスルハウジングに回動可能に連結されて、操舵シリンダーのロッドが左右へ移動することで分割タイロッドとナックルアームを介して車輪を操向する。
前記乗用管理機の操舵装置は、操舵シリンダーのシリンダーハウジングに車台への回動支持部を設ける特殊な複動シリンダーを用いるために製造コストが高価になる。
また、操舵シリンダーの両ロッド端部を左右車輪のナックルアームと屈曲可能に分割タイロッドで連結しているために、回動連結部が多くて遊びが生じやすい。
さらに、左右車輪の間隔(トレッド)を変更するためには、操舵シリンダーに連結する左右の分割タイロッドやアクスルハウジングに組み込むスペーサ等の多くの部品を取り換えなければならない。
本発明は、一般的な複動シリンダーを用いて前後四輪を操舵する四輪操舵装置を重量バランスよく廉価に構成した作業車の操舵装置とすることを課題とする。
上記本発明の課題は、次の技術手段により解決される。
請求項1に記載の発明は、左右前輪3L,3Rに動力を伝動する前アクスルハウジング30Fの前側で、左右前輪3L,3Rのナックルアーム24L,24Rを前タイロッド25Fで連結すると共に、右側のナックルアーム24Rと走行車体2の左右中央に設ける操向シリンダー取付ブラケット27を前操向シリンダー28Fで連結し、左右後輪4L,4Rに動力を伝動する後アクスルハウジング30Rの後側で、左右後輪4L,4Rのナックルアーム24L,24Rを後タイロッド25Rで連結すると共に、左側のナックルアーム24Lと走行車体2の左右中央に設けるシリンダー座29を後操向シリンダー28Rで連結し、
右前輪3R側に前操向シリンダー28Fと右ナックルアーム24Rの回動角度を検出する前操向角度センサ33Fを配置し、左後輪4L側に後操向シリンダー28Rと左ナックルアーム24Lの回動角度を検出する後操向角度センサ33Rを配置する構成とし、
前操向シリンダー28Fと後操向シリンダー28Rは機体の中心に対して対角位置であり、前アクスルハウジング30Fの上部に前操向角度センサ33Fを設け、後アクスルハウジング30Rの上部に後操向角度センサ33Rを設けたことを特徴とする薬液散布作業車とする。
右前輪3R側に前操向シリンダー28Fと右ナックルアーム24Rの回動角度を検出する前操向角度センサ33Fを配置し、左後輪4L側に後操向シリンダー28Rと左ナックルアーム24Lの回動角度を検出する後操向角度センサ33Rを配置する構成とし、
前操向シリンダー28Fと後操向シリンダー28Rは機体の中心に対して対角位置であり、前アクスルハウジング30Fの上部に前操向角度センサ33Fを設け、後アクスルハウジング30Rの上部に後操向角度センサ33Rを設けたことを特徴とする薬液散布作業車とする。
請求項2に記載の発明は、薬液を散布する左右サイド散布ブーム11L,11Rを設け、前記左右サイド散布ブーム11L,11Rを収納する左右サイド散布ブーム受け部11La,11Raは、左右サイド散布ブーム支持アーム11Lb,11Rbで支持する構成とし、前記左サイド散布ブーム支持アーム11Lbにブーム昇降ボタン13を設け、前記ブーム昇降ボタン13を操作すると、エンジンが停止した状態で左右サイド散布ブーム11L,11Rが昇降する構成としたことを特徴とする請求項1に記載の薬液散布作業車とする。
削除
削除
請求項1に記載の発明で、左右前輪3L,3Rはそのナックルアーム24L,24Rが前タイロッド25Fで連結されて連動し、右側のナックルアーム24Rを前操向シリンダー28Fで操向することで左右前輪3L,3Rが同方向に操向され、左右後輪4L,4Rはそのナックルアーム24L,24Rが後タイロッド25Rで連結されて連動し、左側のナックルアーム24Lを後操向シリンダー28Rで操向することで左右後輪4L,4Rが同方向に操向されるが、前操向シリンダー28Fと後操向シリンダー28Rが通常の複動シリンダーで構成出来るために製造コストが低減される。
また、前アクスルハウジング30Fの前側に前タイロッド25Fと前操向シリンダー28Fが設けられ、後アクスルハウジング30Rの後側に後タイロッド25Rと後操向シリンダー28Rが設けられるので、メンテナンス作業が機体の前側と後側から容易に行える。
また、右前輪3R側に前操向シリンダー28Fと前操向角度センサ33Fを配置し、左後輪4L側に後操向シリンダー28Rと後操向角度センサ33Rを配置する。
重量物である前操向シリンダー28Fと後操向シリンダー28Rが機体の中心に対して対角位置に配置されることで、機体の左右バランスが良くなり操向が安定して行える。
また、前アクスルハウジング30Fの上部に前操向角度センサ33Fを設け、後アクスルハウジング30Rの上部に後操向角度センサ33Rを設ける。
また、前アクスルハウジング30Fの上部に前操向角度センサ33Fを設け、後アクスルハウジング30Rの上部に後操向角度センサ33Rを設ける。
請求項2に記載の発明で、請求項1の効果に加えて、左サイド散布ブーム受け部11Laを支持する左サイド散布ブーム支持アーム11Lbにブーム昇降ボタン13を設ける。このブーム昇降ボタン13を操作すると、エンジンが停止した状態で左右サイド散布ブーム11L,11Rが昇降するので、薬液散布作業車への乗り降りがし易くなる。
削除
削除
以下に、図面を参照しながら本発明の作業車の実施例である薬液散布作業車を説明する。なお、本明細書において薬液散布作業車の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向を前、後進方向を後という。左右一対の構成部材がある場合、符号Lは左側、符号Rは右側を指す。
図1は薬液を散布する薬液散布作業車の側面図、図2は薬液散布作業車の正面図、図3は平面図である。尚、これら図1〜図3は、後述する左右散布ブームを走行車体の左右両側面に収納した状態を示す。一方、図4は、薬液散布作業車が圃場で薬液を散布している状態を示す正面図である。
図に示す通り、薬液散布作業車1の走行車体2には左右一対の前輪3L,3R、と左右一対の後輪4L,4Rが設けられていて、走行車体2の前側部には防除散布装置11が取り付けられている。
尚、図2に示す通り、本実施の薬液散布作業車1では、最低地上高さHが高く、輪間距離(トレッド)Wが広く構成されていて、作物を跨いで走行する。
走行車体2の左右一対の前輪3L,3R間の上方には、ボンネット5で覆われたエンジンが搭載されている。左右一対の前輪3L,3Rと左右一対の後輪4L,4Rの間の上方には操縦席6を設け、操縦席6の前方にハンドル7が設けられている。
ハンドル7を左右に操舵すると、後述の操舵設定によって、四輪操舵では左右一対の前輪3L,3R及び左右一対の後輪4L,4Rが同時に連動して逆位相に操舵され、前輪操舵では前輪3L,3Rのみが操向方向に操舵され、後輪操舵では後輪4L,4Rのみが操向方向に操舵されて、操舵方法を変更出来る操舵構成としている。
また、操縦席6の回りを取り囲むように薬液タンク9を着脱自在に設け、薬液タンク9の下方に防除ポンプ10が設けられている。
また、防除散布装置11は機体前方に位置するセンター散布ブーム11Cと、センター散布ブーム11Cの左右両側に設けられた左・右サイド散布ブーム11L,11Rとで構成されている。
そして、防除散布装置11を昇降シリンダー15(図1参照)により昇降し、開閉レバー17L,17Rにより左・右サイド散布ブーム11L,11Rを夫々単独で左右に突出した散布作業状態(図4参照)と、走行車体2の両側方に沿わせた状態に収容する(図1〜図3参照)ように構成している。
そして、薬液タンク9の薬液は防除ポンプ10により防除散布装置11に送られ、センター散布ブーム11C及び左・右サイド散布ブーム11L,11Rに複数設けられた散布ノズル14,14…から、薬液が散布される。
ハンドル7を立設するフロントパネル18には、図5に示す如く、ハンドル軸7aを中心に前側のエンジン監視パネル19には回転計19aとバッテリやオイルの状態を示すエンジン情報表示部19bが設け、右側前部には操舵方法を設定する直進ボタン21aと前輪操舵ボタン21bと後輪操舵ボタン21cと全輪操舵ボタン21dを設け、その下部にエンジン起動スイッチ20を設け、左側前部には防除散布装置11の散布装置制御ボタン22を設けている。
なお、前輪操舵ボタン21bと後輪操舵ボタン21cと全輪操舵ボタン21dでの制御は、全て一旦直進走行に戻した後に設定操舵になるようにする。
ボンネット5の側面にブーム昇降ボタン13を設けている。具体的には、図10に示すように、左サイド散布ブーム11Lを収納時に受ける左サイド散布ブーム受け部11Laを支持する左サイド散布ブーム支持アーム11Lbにブーム昇降ボタン13を取り付ける構成としている。エンジンが回転していない状態で作業者が操縦席6に乗り込む際に、前記ブーム昇降ボタン13を上側に上げる操作をすると、昇降シリンダー15を作動させて左・右サイド散布ブーム11L,11Rが上昇し(左右サイド散布ブーム受け部11La,11Raから離れて上昇)、作業者が左・右サイド散布ブーム11L,11Rの下方を通過して乗降し易くなる。また、作業者が操縦席6から降りる際に、左・右サイド散布ブーム11L,11Rを上昇させた状態でエンジンを停止させ、作業者が左・右サイド散布ブーム11L,11Rの下方を通過して降りやすくなる。そして、前記ブーム昇降ボタン13を下側に下げる操作をすると、左・右サイド散布ブーム11L,11Rは、左右サイド散布ブーム受け部11La,11Raに収納される。なお、符号Bはバッテリー収納受けである。
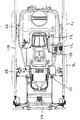
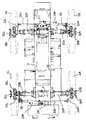
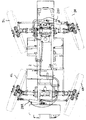
次に、走行車体2に対する前輪3L,3Rと後輪4L,4Rの取付を示す平面図である図6〜図8を用いて、操舵機構について説明する。
伝動軸を内装した前アクスルハウジング30Fの左右端部に左右支脚ケース31L,31Rを設け、この左右支脚ケース31L,31Rの下端伝動ケース38L、38Rで側方に設けるフランジ32L,32Rに前輪3L,3Rを取り付け、同様に伝動軸を内装した後アクスルハウジング30Rの左右端部に左右支脚ケース31L,31Rを設け、この左右支脚ケース31L,31Rの下端伝動ケース38L、38Rで側方に設けるフランジ32L,32Rに後輪4L,4Rを取り付けている。
なお、下端伝動ケース38L、38Rは、前後に4個の伝動ケースを使用するが、全て同一構成とすると共用性が高まって製造コストを低減できる。
左右支脚ケース31L,31Rの上端でフランジ32L,32Rの向きを変更するナックルアーム24L,24Rを前タイロッド25Fで連結して前輪3L,3Rを同一方向に操向し、同様に、左右支脚ケース31L,31Rの上端でフランジ32L,32Rの向きを変更するナックルアーム24L,24Rを後タイロッド25Rで連結して後輪4L,4Rを同一方向に操向する。
前アクスルハウジング30Fの前側では走行車体2の左右メインフレームを連結する部材の中央部にボルトで前に向けて取り付ける操向シリンダー取付ブラケット27と右ナックルアーム24Rと一体のシリンダアーム26を前タイロッド25Fの上で複動型油圧シリンダーである前操向シリンダー28Fで連結し、同様に後アクスルハウジング30Rの後側では走行車体2の左右メインフレームを繋ぐプレート部材に取り付けたシリンダー座29と左ナックルアーム24Lと一体のシリンダアーム26を後タイロッド25Rの上で複動型油圧シリンダーである後操向シリンダー28Rで連結する。操向シリンダー取付ブラケット27は取り外して位置調整可能である。また、シリンダー座29も取り外して位置調整可能な部材としても良い。
操向シリンダー取付ブラケット27の前操向シリンダー28F取付部が左右前輪3L,3Rの操向中心近傍であり、シリンダー座29の後操向シリンダー28R取付部が左右後輪4L,4Rの操向中心近傍であることで、前操向シリンダー28Fと後操向シリンダー28Rのロッドスライドが効率的に作用する。
また、前操向シリンダー28Fは前アクスルハウジング30Fと、後操向シリンダー28Rは後アクスルハウジング30Rと同じ高さに設けることで、走行車体2下部の地上高さHを高く確保できている。
前アクスルハウジング30Fの右端部近くの上部に右ナックルアーム24Rの回動角度を検出する前操向角度センサ33Fを設け、後アクスルハウジング30Rの左端部近くの上部に左ナックルアーム24Lの回動角度を検出する後操向角度センサ33Rを設ける。
前輪3L,3Rを操向する構成と後輪4L,4Rを操向する構成はほぼ同一で、前操向シリンダー28Fを走行車体2に取り付ける部材が操向シリンダー取付ブラケット27で後操向シリンダー28Rを走行車体2に取り付ける部材がシリンダー座29であって、部品の共用化で製造コストを低減できる。
また、走行車体2に対して前操向シリンダー28Fが右側で後操向シリンダー28Rが左側であること、すなわち機体の中心に対して対角位置であることによって重い操向シリンダーが左右に分散されて全体の左右バランスを良くする。前操向シリンダー28Fと後操向シリンダー28Rは左右逆に配置しても良い。
図9は、前操向シリンダー28Fと後操向シリンダー28Rの油圧制御回路図で、エンジンEで駆動される油圧ポンプ34でオイルタンク37から吸い上げられたオイルがハンドル7で制御される分流器35を介して前バルブ36Fを通って前操向シリンダー28Fに送られ、また、後バルブ36Rを通って後操向シリンダー28Rに送られる。また、分流器35は、前記直進ボタン21aや前輪操舵ボタン21bや後輪操舵ボタン21cや全輪操舵ボタン21dで制御され、前操向シリンダー28Fと後操向シリンダー28Rを適宜に作動する。
油圧配管は、図7に示す如く、走行車体2のフレームに沿って配策する。
なお、前輪3L,3Rと後輪4L,4Rは、直進時にデフロックとし、操向するとデフロックを解除するようにしても良い。
3L 左前輪
3R 右前輪
4L 左後輪
4R 右後輪
11L 左サイド散布ブーム
11R 右サイド散布ブーム
11La 左右サイド散布ブーム受け部
11Ra 左右サイド散布ブーム受け部
11Lb 左サイド散布ブーム支持アーム
11Rb 右サイド散布ブーム支持アーム
13 ブーム昇降ボタン
24L 左ナックルアーム
24R 右ナックルアーム
25F 前タイロッド
25R 後タイロッド
27 操向シリンダー取付ブラケット
28F 前操向シリンダー
28R 後操向シリンダー
29 シリンダー座
30F 前アクスルハウジング
30R 後アクスルハウジング
33F 前操向角度センサ
33R 後操向角度センサ
3R 右前輪
4L 左後輪
4R 右後輪
11L 左サイド散布ブーム
11R 右サイド散布ブーム
11La 左右サイド散布ブーム受け部
11Ra 左右サイド散布ブーム受け部
11Lb 左サイド散布ブーム支持アーム
11Rb 右サイド散布ブーム支持アーム
13 ブーム昇降ボタン
24L 左ナックルアーム
24R 右ナックルアーム
25F 前タイロッド
25R 後タイロッド
27 操向シリンダー取付ブラケット
28F 前操向シリンダー
28R 後操向シリンダー
29 シリンダー座
30F 前アクスルハウジング
30R 後アクスルハウジング
33F 前操向角度センサ
33R 後操向角度センサ
Claims (2)
- 左右前輪(3L,3R)に動力を伝動する前アクスルハウジング(30F)の前側で、左右前輪(3L,3R)のナックルアーム(24L,24R)を前タイロッド(25F)で連結すると共に、右側のナックルアーム(24R)と走行車体(2)の左右中央に設ける操向シリンダー取付ブラケット(27)を前操向シリンダー(28F)で連結し、左右後輪(4L,4R)に動力を伝動する後アクスルハウジング(30R)の後側で、左右後輪(4L,4R)のナックルアーム(24L,24R)を後タイロッド(25R)で連結すると共に、左側のナックルアーム(24L)と走行車体(2)の左右中央に設けるシリンダー座(29)を後操向シリンダー(28R)で連結し、
右前輪(3R)側に前操向シリンダー(28F)と右ナックルアーム(24R)の回動角度を検出する前操向角度センサ(33F)を配置し、左後輪(4L)側に後操向シリンダー(28R)と左ナックルアーム(24L)の回動角度を検出する後操向角度センサ(33R)を配置する構成とし、
前操向シリンダー(28F)と後操向シリンダー(28R)は機体の中心に対して対角位置であり、前アクスルハウジング(30F)の上部に前操向角度センサ(33F)を設け、後アクスルハウジング(30R)の上部に後操向角度センサ(33R)を設けたことを特徴とする薬液散布作業車。 - 薬液を散布する左右サイド散布ブーム(11L,11R)を設け、前記左右サイド散布ブーム(11L,11R)を収納する左右サイド散布ブーム受け部(11La,11Ra)は、左右サイド散布ブーム支持アーム(11Lb,11Rb)で支持する構成とし、前記左サイド散布ブーム支持アーム(11Lb)にブーム昇降ボタン(13)を設け、前記ブーム昇降ボタン(13)を操作すると、エンジンが停止した状態で左右サイド散布ブーム(11L,11R)が昇降する構成としたことを特徴とする請求項1に記載の薬液散布作業車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018218723A JP2019059471A (ja) | 2018-11-21 | 2018-11-21 | 作業車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018218723A JP2019059471A (ja) | 2018-11-21 | 2018-11-21 | 作業車 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015115971A Division JP2017001475A (ja) | 2015-06-08 | 2015-06-08 | 作業車 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019059471A true JP2019059471A (ja) | 2019-04-18 |
Family
ID=66176153
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018218723A Pending JP2019059471A (ja) | 2018-11-21 | 2018-11-21 | 作業車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019059471A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110155170A (zh) * | 2019-05-22 | 2019-08-23 | 常熟华东汽车有限公司 | 车辆的全轮转向装置 |
| CN115447667A (zh) * | 2022-09-19 | 2022-12-09 | 江苏徐工工程机械研究院有限公司 | 一种挖掘装载机的转向系统及控制方法 |
| KR102501638B1 (ko) * | 2022-09-30 | 2023-02-21 | 호산엔지니어링(주) | 텔레스코픽 마스트형 고소작업대 |
-
2018
- 2018-11-21 JP JP2018218723A patent/JP2019059471A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110155170A (zh) * | 2019-05-22 | 2019-08-23 | 常熟华东汽车有限公司 | 车辆的全轮转向装置 |
| CN110155170B (zh) * | 2019-05-22 | 2024-02-13 | 常熟华东汽车有限公司 | 车辆的全轮转向装置 |
| CN115447667A (zh) * | 2022-09-19 | 2022-12-09 | 江苏徐工工程机械研究院有限公司 | 一种挖掘装载机的转向系统及控制方法 |
| CN115447667B (zh) * | 2022-09-19 | 2023-07-28 | 江苏徐工工程机械研究院有限公司 | 一种挖掘装载机的转向系统及控制方法 |
| KR102501638B1 (ko) * | 2022-09-30 | 2023-02-21 | 호산엔지니어링(주) | 텔레스코픽 마스트형 고소작업대 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12351248B2 (en) | All-terrain utility vehicle and methods thereof | |
| CN100506588C (zh) | 具有横行系统的作业车辆 | |
| US10703409B2 (en) | Work vehicle axle device | |
| US6997641B2 (en) | Road milling machine with steering gear | |
| JP2019059471A (ja) | 作業車 | |
| JP7792880B2 (ja) | 作業車 | |
| KR102215888B1 (ko) | 소형 다용도 건설 장비 | |
| US4147227A (en) | Standard model tractor with removable second set of operating controls | |
| US3123222A (en) | Mobile cranes | |
| US4126198A (en) | Three-wheeled farm vehicle | |
| JP2017001475A (ja) | 作業車 | |
| JP2017001476A (ja) | 作業車 | |
| JP2019017310A (ja) | 自走式防除機 | |
| US20240100931A1 (en) | Work Vehicle | |
| JP7788980B2 (ja) | 作業車 | |
| JP4414033B2 (ja) | 農薬散布車 | |
| JPH081603Y2 (ja) | 管理作業車 | |
| JP6645343B2 (ja) | 作業車両 | |
| JPH08318750A (ja) | 乗用管理作業車 | |
| JP2020199791A (ja) | 作業車両 | |
| JP3221432B2 (ja) | 散布作業車 | |
| JP3503039B2 (ja) | 乗用管理作業車 | |
| JP2503734Y2 (ja) | 歩行型田植機 | |
| JP2021171016A (ja) | 自走式防除機 | |
| JP2003118410A (ja) | 作業車 |