JP2019063902A - 多関節ロボットおよびその操作方法 - Google Patents
多関節ロボットおよびその操作方法 Download PDFInfo
- Publication number
- JP2019063902A JP2019063902A JP2017189684A JP2017189684A JP2019063902A JP 2019063902 A JP2019063902 A JP 2019063902A JP 2017189684 A JP2017189684 A JP 2017189684A JP 2017189684 A JP2017189684 A JP 2017189684A JP 2019063902 A JP2019063902 A JP 2019063902A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- end effector
- actuator
- link
- articulated robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Description
この発明の他の目的は、物品をワークの穴に挿入させる作業を、物品とワークとの位置ずれの影響を受けることなく行わせることができる上記多関節ロボットの操作方法を提供することである。
前記第一アーム用アクチュエータ、前記第二アーム用アクチュエータ、および前記エンドエフェクタ作動機構用アクチュエータのうちの少なくとも一つのアクチュエータは、出力側に加えられた逆入力トルクの回転駆動部への伝達を遮断可能なクラッチ機構を具備することを特徴とする。
このように1軸直動機構による送り方向の少しのずれを許容することができるため、1軸直動機構として、構造的に送り方向のずれが生じる可能性のある機構、例えばすべりねじ機構を使用することができる。すべりねじ機構は、比較的に軽量かつ簡素な構造であり、低コストで製作することができる。
例えば、エンドエフェクタが把持した物品を固定位置に設けられたワークの穴に挿入する作業の場合、昇降機構によりエンドエフェクタを昇降させるとき、第一アーム用アクチュエータおよび第二アーム用アクチュエータの各クラッチ機構を遮断状態にして、アクチュエータの回転駆動部へ逆入力トルクが伝達されないようにする。これにより、第一アームおよび第二アームが自由に動けるようなる。このため、何らかの理由で物品の中心軸と穴の中心軸の平面視位置とが少しずれていたとしても、穴の内壁から受ける力に応じて第一アームおよび第二アームが動くことにより前記ずれを吸収して、物品をワークの穴に挿入することができる。
ワーク搬送装置が設けられていると、ワークを作業位置まで効率良く送ることができるので、作業能率が向上する。前述のように、ワークの位置が作業位置から多少ずれていても、そのずれを吸収して作業を行うことができるため、ワーク搬送装置として、搬送精度がさほど要求されない比較的安価な装置、例えばベルトコンベア装置を使用することができる。
[第1の実施形態]
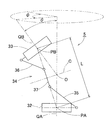
図1は第1の実施形態にかかる多関節ロボットの概略構成を示す図、図2はその平面図である。この多関節ロボット1は、天井面に固定の支持体2に設けられ鉛直方向の軸心C1回りに回転自在に支持された第一アーム3と、この第一アーム3の先端に鉛直方向の軸心C2回りに回転自在に支持された第二アーム4と、この第二アーム4の先端に鉛直方向の軸心C3回りに回転自在に支持されたパラレルリンク機構5と、このパラレルリンク機構5に搭載された1軸直動機構6とを備える。パラレルリンク機構5は、回転2自由度機構の一形態である。パラレルリンク機構5と1軸直動機構6とで、エンドエフェクタ作動機構7を構成する。
図3は、パラレルリンク機構5および姿勢制御用アクチュエータ31を示す正面図である。これらパラレルリンク機構5と姿勢制御用アクチュエータ31とでリンク作動装置30を構成する。また、図4および図5は、パラレルリンク機構5だけを取り出して表わした図であり、互いに異なる状態を示している。なお、図3〜図5では、図1に示す設置状態と上下反転して示されている。
条件1:各リンク機構34におけるリンクハブ32,33と端部リンク部材35,36との回転対偶の中心軸O1の角度および長さが互いに等しい。
条件2:リンクハブ32,33と端部リンク部材35,36との回転対偶の中心軸O1および端部リンク部材35,36と中央リンク部材37との回転対偶の中心軸O2が、基端側および先端側において球面リンク中心PA,PBで交差する。
条件3:基端側の端部リンク部材35と先端側の端部リンク部材36の幾何学的形状が等しい。
条件4:中央リンク部材37における基端側部分と先端側部分の幾何学的形状が等しい。
条件5:中央リンク部材37の対称面に対して、中央リンク部材37と端部リンク部材35,36との角度位置関係が基端側と先端側とで同じである。
なお、この例では、リンク機構34と同数の姿勢制御用アクチュエータ31が設けられているが、3組のリンク機構34のうち少なくとも2組に姿勢制御用アクチュエータ31が設けられていれば、基端側のリンクハブ32に対する先端側のリンクハブ33の姿勢を確定することができる。
パラレルリンク機構回転用アクチュエータ13および姿勢制御用アクチュエータ31として使用されるエンドエフェクタ作動機構用アクチュエータについて、図8、図9と共に詳しく説明する。
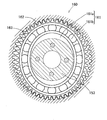
図8に示すように、エンドエフェクタ作動機構用アクチュエータは、回転駆動部である駆動モータ150を有し、この駆動モータ150のモータ軸151に、キー152により筒状の入力軸153が連結されている。そして、入力軸153の先端に、軸受154を介して出力軸155が回転自在に支持されている。出力軸155は、円板状の端面部材155aと、その背面に固定された背面側部材155bとからなる。出力軸155の背面側部材155bは、クロスローラ軸受156の内輪に結合されている。クロスローラ軸受156は、駆動モータ150のハウジングに外輪を固定して設けられている。
クラッチ機構230のコイル235aに通電されておらずクラッチ接続状態のとき、すなわち減速機構160のサーキュラースプライン162が回転不能に拘束された状態のときに、駆動モータ150から入力軸151に入力トルクが加えられると、まず、入力軸151と一体にウェイブジェネレータ161のボールベアリング161bの内輪が回転する。すると、ボールベアリング161bの外輪に円筒部の内周を押圧されたフレックススプライン1631が、弾性変形してサーキュラースプライン162との噛合位置を変えていく。これにより、フレックススプライン163がサーキュラースプライン162との歯数の差分だけ回転し、その回転が出力軸153に伝達される。
図1において、前記1軸直動機構6は、パラレルリンク機構5の先端側のリンクハブ33に、直動方向が先端側のリンクハブ33の中心軸QBと一致するように取り付けられている。1軸直動機構6としては、例えばすべりねじ構造のものが使用される。
また、蓋116,117の内周部は、スライド軸102を回転および軸方向移動自在に支持するラジアル軸受部121,122とされている。これらラジアル軸受部121,122は、樹脂でできている。
制御装置(図示せず)の制御により、コイル111が通電されると、中空モータ101の中空軸113が回転し、この中空軸113に設けられたナット103が回転する。このナット103に螺合したスライド軸102も回転しようとするが、スライド軸102は、回り止め溝128に係合した係止体104,105により回り止めされているため回転できずに、軸方向に進退する。中空軸113の回転は回転検出手段106に検出され、その検出信号が制御装置に送られる。
次に、この多関節ロボット1の操作方法を、エンドエフェクタに把持された物品を固定位置に設けられたワークの穴に挿入する場合を例にとって説明する。図13(A),(B)は、エンドエフェクタ取付部材140に物品把持用のエンドエフェクタ300を取り付け、このエンドエフェクタ300で円柱状の物品301を把持し、その物品301を斜め姿勢で設置されたワーク302の円筒状の穴302aに挿入する作業を示している。穴302aの内径は、物品301の外径よりも少しだけ大きい。
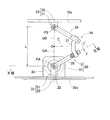
図14は、前記実施形態に対して、第一アーム3を昇降させる昇降機構8が設けられた多関節ロボット1を示す。昇降機構8は、天井面に支持体180を固定し、この支持体180に直動アクチュエータ181をその進退方向が鉛直方向となるように設け、この直動アクチュエータ181に昇降部材182を固定してある。そして、昇降部材182に、第一アーム3が鉛直方向の軸心C1回りに回転自在に支持されている。第一アーム回転用アクチュエータ11は、昇降部材182の内部に設けられている。
なお、昇降機構8は、カバー183によって覆われている。カバー183は、天井面に固定された固定部183aと、前記昇降部材182に取り付けられ固定部材183に対して上下に摺動する昇降部183bとからなる。
図15は、前記実施形態とはリンク作動装置30の構成が異なる多関節ロボット1を示す。以下、前記実施形態と構成が異なる箇所についてのみ説明し、構成が同じ箇所については、図面に前記実施形態と同一符号を付して表し、その説明を省略する。
また、エンドエフェクタ作動機構としては、エンドエフェクタの姿勢を変更することが可能であれば、パラレルリンク機構5以外の回転2自由度機構を採用してもよい。
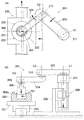
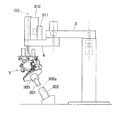
図18は第2の実施形態にかかる多関節ロボットの平面図と正面図である。この多関節ロボット201は、地面に固定の支持体202に設けられた昇降機構208と、この昇降機構208に支持され鉛直方向の軸心C1回りに回転自在に支持された第一アーム203と、この第一アーム203の先端に鉛直方向の軸心C2回りに回転自在に支持された第二アーム204と、この第二アーム204の先端に設けられ鉛直方向の軸心C3回りにエンドエフェクタを回転させるエンドエフェクタ作動機構としてのエンドエフェクタ回転機構205とを備える。エンドエフェクタ回転機構205から下方に延びる回転軸の先端に、物品把持用のエンドエフェクタ300が取り付けられている。
この多関節ロボット1の操作方法を、図19、図20に示すように、エンドエフェクタ300に把持された物品301をワーク搬送装置220で搬送されるワーク302の上向きの穴302aに挿入する場合を例にとって説明する。物品301は円柱状で、ワーク302の穴302aは、内径が物品301の外径よりも少しだけ大きい円筒状である。
3…第一アーム
4…第二アーム
5…パラレルリンク機構(回転2自由度機構)
6…1軸直動機構
7…エンドエフェクタ動作機構
11…第一アーム回転用アクチュエータ
12…第二アーム回転用アクチュエータ
13…パラレルリンク機構回転用アクチュエータ(エンドエフェクタ動作機構用アクチュエータ)
31…姿勢制御用アクチュエータ(エンドエフェクタ動作機構用アクチュエータ)
32…基端側のリンクハブ
33…先端側のリンクハブ
34…リンク機構
35…基端側の端部リンク部材
36…先端側の端部リンク部材
37…中央リンク部材
150…駆動モータ(回転駆動部)
203…第一アーム
204…第二アーム
208…昇降機構
211…第一アーム回転用アクチュエータ
212…第二アーム回転用アクチュエータ
230…クラッチ機構
300…エンドエフェクタ
301…物品
302…ワーク
302a…穴
C1,C2,C3…鉛直方向の軸心
Claims (7)
- 支持体に設けられ鉛直方向の軸心回りに回転自在な第一アームと、この第一アームを回転させる第一アーム用アクチュエータと、前記第一アームの先端に設けられ鉛直方向の軸心回りに回転自在な第二アームと、この第二アームを回転させる第二アーム用アクチュエータと、前記第二アームの先端に設けられエンドエフェクタを鉛直方向の軸心回りに回転および姿勢変更のいずれか一方または両方を可能に支持するエンドエフェクタ作動機構と、このエンドエフェクタ作動機構を作動させるエンドエフェクタ作動機構用アクチュエータとを備え、
前記第一アーム用アクチュエータ、前記第二アーム用アクチュエータ、および前記エンドエフェクタ作動機構用アクチュエータのうちの少なくとも一つのアクチュエータは、出力側に加えられた逆入力トルクの回転駆動部への伝達を遮断可能なクラッチ機構を具備することを特徴とする多関節ロボット。 - 請求項1に記載の多関節ロボットにおいて、前記エンドエフェクタ作動機構は、前記第二アームの先端に設けられた基端側部材に対して先端側部材を姿勢変更させる回転2自由度機構と、この回転2自由度機構の前記先端側部材に設けられてエンドエフェクタを1軸方向に進退させる1軸直動機構とを有し、前記エンドエフェクタ作動機構用アクチュエータは前記回転2自由度機構を作動させるものであり、このエンドエフェクタ作動機構用アクチュエータに前記クラッチ機構が設けられている多関節ロボット。
- 請求項2に記載の多関節ロボットにおいて、前記回転2自由度機構は、前記基端側部材である基端側のリンクハブに対し前記先端側部材である先端側のリンクハブが3組以上のリンク機構を介して姿勢を変更可能に連結され、前記各リンク機構は、それぞれ前記基端側のリンクハブおよび前記先端側のリンクハブに一端が回転可能に連結された基端側および先端側の端部リンク部材と、これら基端側および先端側の端部リンク部材の他端に両端がそれぞれ回転可能に連結された中央リンク部材とを有するパラレルリンク機構であって、
前記3組以上のリンク機構のうちの2組以上のリンク機構に前記基端側のリンクハブに対して前記先端側のリンクハブの姿勢を任意に変更させる前記エンドエフェクタ作動機構用アクチュエータが設けられている多関節ロボット。 - 前記エンドエフェクタに把持された物品を固定位置に設けられたワークの穴に挿入する場合における、請求項2または請求項3に記載の多関節ロボットの操作方法であって、
前記第一アーム、前記第二アーム、および前記エンドエフェクタ作動機構を作動させて、前記物品の中心軸が前記ワークの穴の中心軸と一致し、かつ前記物品の先端が前記ワークの穴の入口付近に位置するように位置決めした後、前記エンドエフェクタ作動機構用アクチュエータの前記クラッチ機構を遮断した状態で、前記1軸直動機構を作動させて前記物品を前記ワークの穴に挿入する多関節ロボットの操作方法。 - 請求項1に記載の多関節ロボットにおいて、前記第一アーム、前記第二アーム、および前記エンドエフェクタ作動機構の少なくともいずれか一つを昇降させる昇降機構を有し、前記第一アーム用アクチュエータおよび前記第二アーム用アクチュエータに前記クラッチ機構が設けられている多関節ロボット。
- 請求項5に記載の多関節ロボットにおいて、前記エンドエフェクタ作動機構の下方に、前記エンドエフェクタの作業対象となるワークを水平面に沿って一定方向に移動させるワーク搬送装置が設けられた多関節ロボット。
- 前記エンドエフェクタに把持された物品を前記ワーク搬送装置で搬送されるワークの上向きの穴に挿入する場合における、請求項6に記載の多関節ロボットの操作方法であって、
前記第一アームおよび前記第二アームを作動させて、前記物品の中心軸が前記ワークの穴の中心軸と一致するように位置決めした後、前記第一アーム用アクチュエータおよび前記第二アーム用アクチュエータの各クラッチ機構を遮断した状態で、前記昇降機構を作動させて前記物品を前記ワークの穴に挿入する多関節ロボットの操作方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017189684A JP2019063902A (ja) | 2017-09-29 | 2017-09-29 | 多関節ロボットおよびその操作方法 |
| PCT/JP2018/036030 WO2019065873A1 (ja) | 2017-09-29 | 2018-09-27 | 多関節ロボットおよびその操作方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017189684A JP2019063902A (ja) | 2017-09-29 | 2017-09-29 | 多関節ロボットおよびその操作方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019063902A true JP2019063902A (ja) | 2019-04-25 |
Family
ID=65903547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017189684A Pending JP2019063902A (ja) | 2017-09-29 | 2017-09-29 | 多関節ロボットおよびその操作方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2019063902A (ja) |
| WO (1) | WO2019065873A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024011613A (ja) * | 2022-07-15 | 2024-01-25 | 日鉄エンジニアリング株式会社 | 制御システム |
| US12330308B2 (en) | 2020-03-09 | 2025-06-17 | Kabushiki Kaisha Toshiba | Robot system, parallel link mechanism, control method, control device, and storage medium |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6072004A (ja) * | 1983-09-27 | 1985-04-24 | Kobe Steel Ltd | ダイレクト教示型工業用ロボットの制御装置 |
| JPS61226281A (ja) * | 1985-03-29 | 1986-10-08 | 三菱重工業株式会社 | マニピユレ−タ |
| JPH10225881A (ja) * | 1997-02-14 | 1998-08-25 | Natl Aerospace Lab | オフセット回転関節及び該オフセット回転関節を有する多関節ロボット |
| JP2001507635A (ja) * | 1997-10-27 | 2001-06-12 | ファナック ロボティックス ノース アメリカ インコーポレイテッド | 自動車のドアを開くロボット組立体 |
| JP2009078312A (ja) * | 2007-09-25 | 2009-04-16 | Seiko Epson Corp | 多関節ロボット用ハンド及びこのハンドを用いた多関節ロボット |
| WO2009110242A1 (ja) * | 2008-03-06 | 2009-09-11 | パナソニック株式会社 | マニピュレータおよびその制御方法 |
| JP2016147350A (ja) * | 2015-02-13 | 2016-08-18 | Ntn株式会社 | リンク作動装置を用いた多関節ロボット |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08187687A (ja) * | 1995-01-10 | 1996-07-23 | Toshiba Corp | ロボットの制御装置およびロボットのハンド装置 |
| JP5384955B2 (ja) * | 2008-12-04 | 2014-01-08 | 原田電子工業株式会社 | ハンドル回転操作装置 |
| JP6324033B2 (ja) * | 2013-11-22 | 2018-05-16 | Ntn株式会社 | リンク作動装置 |
-
2017
- 2017-09-29 JP JP2017189684A patent/JP2019063902A/ja active Pending
-
2018
- 2018-09-27 WO PCT/JP2018/036030 patent/WO2019065873A1/ja not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6072004A (ja) * | 1983-09-27 | 1985-04-24 | Kobe Steel Ltd | ダイレクト教示型工業用ロボットの制御装置 |
| JPS61226281A (ja) * | 1985-03-29 | 1986-10-08 | 三菱重工業株式会社 | マニピユレ−タ |
| JPH10225881A (ja) * | 1997-02-14 | 1998-08-25 | Natl Aerospace Lab | オフセット回転関節及び該オフセット回転関節を有する多関節ロボット |
| JP2001507635A (ja) * | 1997-10-27 | 2001-06-12 | ファナック ロボティックス ノース アメリカ インコーポレイテッド | 自動車のドアを開くロボット組立体 |
| JP2009078312A (ja) * | 2007-09-25 | 2009-04-16 | Seiko Epson Corp | 多関節ロボット用ハンド及びこのハンドを用いた多関節ロボット |
| WO2009110242A1 (ja) * | 2008-03-06 | 2009-09-11 | パナソニック株式会社 | マニピュレータおよびその制御方法 |
| JP2016147350A (ja) * | 2015-02-13 | 2016-08-18 | Ntn株式会社 | リンク作動装置を用いた多関節ロボット |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12330308B2 (en) | 2020-03-09 | 2025-06-17 | Kabushiki Kaisha Toshiba | Robot system, parallel link mechanism, control method, control device, and storage medium |
| JP2024011613A (ja) * | 2022-07-15 | 2024-01-25 | 日鉄エンジニアリング株式会社 | 制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019065873A1 (ja) | 2019-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6502115B2 (ja) | リンク作動装置を用いた多関節ロボット | |
| US8251863B2 (en) | Continuously variable transmission with multiple outputs | |
| JP5675258B2 (ja) | リンク作動装置 | |
| US20080028881A1 (en) | Linkage System | |
| JP2005144627A (ja) | リンク作動装置 | |
| JP6305076B2 (ja) | 歯車機構、変速機及び多関節ロボットアーム | |
| JP2002341076A (ja) | 角度調整テーブル装置 | |
| CN108169872A (zh) | 一种基于柔性铰链的高精度、高稳定反射镜调整装置 | |
| JP2014097548A (ja) | 剛性可変機構、剛性可変駆動装置及び関節駆動装置 | |
| CN104708624A (zh) | 同轴式间接驱动多关节机器人手臂的传动机构 | |
| JP2019063902A (ja) | 多関節ロボットおよびその操作方法 | |
| JP6576646B2 (ja) | リンク作動装置を用いた多関節ロボット | |
| JP2005299828A (ja) | リンク作動装置 | |
| US20210164545A1 (en) | Relative Translation System | |
| CN105598996B (zh) | 基于非完整约束的新型欠驱动机器人手腕装置 | |
| JP2004009276A (ja) | リンク作動装置 | |
| CN115194737A (zh) | 差动式六自由度并联微动平台 | |
| JP4648161B2 (ja) | ダブルアーム列式基板搬送用ロボット | |
| ES2994306T3 (en) | A clutch, industrial robot and the use thereof | |
| JP7089852B2 (ja) | リンク作動装置 | |
| JP6692626B2 (ja) | パラレルリンク機構を用いた作業装置 | |
| JPS6253296B2 (ja) | ||
| JP2019063906A (ja) | パラレルリンク機構を用いた作業装置 | |
| CN223778461U (zh) | 机器人脚踝结构及机器人系统 | |
| JP2019068544A (ja) | 直動アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200826 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210106 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20210203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211019 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220412 |