JP2019091204A - 転針検出装置 - Google Patents
転針検出装置 Download PDFInfo
- Publication number
- JP2019091204A JP2019091204A JP2017219054A JP2017219054A JP2019091204A JP 2019091204 A JP2019091204 A JP 2019091204A JP 2017219054 A JP2017219054 A JP 2017219054A JP 2017219054 A JP2017219054 A JP 2017219054A JP 2019091204 A JP2019091204 A JP 2019091204A
- Authority
- JP
- Japan
- Prior art keywords
- optical flow
- vehicle
- turning
- image
- gravity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Closed-Circuit Television Systems (AREA)
- Image Analysis (AREA)
Abstract
【課題】路面上の白線の有無に関わらず、車両の転針を検知する。【解決手段】転針検出装置2は、車両前方又は車両後方を写した2つの画像間における複数のオプティカルフローを計算するオプティカルフロー計算手段21と、前記オプティカルフロー計算手段により計算された前記オプティカルフローの始点及び終点の一方が座標平面の原点に一致するように前記オプティカルフローを平行移動させ、前記平行移動後の前記オプティカルフローの始点及び終点の他方からなる点群の重心を計算する重心計算手段22と、前記重心計算手段により計算された前記重心の位置に基づいて前記車両が転針しているかどうかを検出する転針検出手段23とを備えている。【選択図】図2
Description
本発明は転針検出装置に関する。
特許文献1には、車両に搭載される車載器が記載されている。この車載器は、車両前方を撮影する撮影部から撮影画像を受け付ける画像受付部と、車両の現在の走行速度を算出するための情報を受け付ける速度受付部と、画像受付部及び速度受付部に接続された制御部とを備えている。制御部は、撮影画像における消失点位置に基づいて車両の進路変化を検出し、且つ、車両の走行速度が所定の閾値より大きいことを識別した場合には、画像データの記録及び警報の出力の少なくとも一方を所定の動作として実行する。
本発明は、路面上の白線の有無に関わらず、車両の転針を検知することを目的とする。
上記目的を達成するために、本発明に係る転針検出装置は、車両前方又は車両後方を写した2つの画像間における複数のオプティカルフローを計算するオプティカルフロー計算手段と、前記オプティカルフロー計算手段により計算された前記オプティカルフローの始点及び終点の一方が座標平面の原点に一致するように前記オプティカルフローを平行移動させ、前記平行移動後の前記オプティカルフローの始点及び終点の他方からなる点群の重心を計算する重心計算手段と、前記重心計算手段により計算された前記重心の位置に基づいて前記車両が転針しているかどうかを検出する転針検出手段とを備えている。
本発明によれば、路面上の白線の有無に関わらず、車両の転針を検知することができる。
以下、本発明を図示の実施の形態に基づいて説明する。ただし、本発明は、以下に説明する実施の形態によって限定されるものではない。
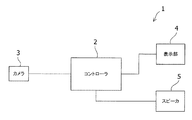
図1に示すように、車両に搭載される転針検出システム1は、コントローラ(「転針検出装置」とも呼ぶ)2とカメラ3と表示部4とスピーカ5とを備えている。カメラ3と表示部4とスピーカ5とは、コントローラ2に接続される。
カメラ3は、車両後方を写した画像を撮影する。この画像は、コントローラ2に送られる。カメラ3は広角レンズを備えているため、カメラ3による画像には路面と空が両方写ることになる。
表示部4は、コントローラ2からの入力に基づいて、転針検出システム1が搭載されている車両の乗員に対し、当該車両が転針しているかどうかを視覚的に伝える装置である。表示部4は、転針検出システム1のための専用ディスプレイとすることができる。あるいは、カーナビゲーションシステムのディスプレイを表示部4として利用することも可能である。
スピーカ5は、コントローラ2からの入力に基づいて、乗員に対し、車両が転針状態にあることを音声で伝える装置である。スピーカ5は、転針検出システム1のための専用スピーカとすることができる。あるいは、転針検出システム1が搭載されている車両のオーディオ装置のスピーカをスピーカ5として利用することも可能である。
図2に示すように、コントローラ2は、オプティカルフロー計算手段21と、重心計算手段22と、転針検出手段23とを備えている。各手段の処理内容は後述する。また、コントローラ2は、そのハードウェア構成として、各手段の機能を実行するように動作可能なプログラム及びデータを格納するメモリと、演算処理を行うプロセッサと、転針検出システム1内の他の装置とのインタフェースとを備えている。
図3は、転針検出装置2が行う処理のフローチャートである。まず、ステップS1にて、オプティカルフロー計算手段21は、カメラ3により第1の時点において撮影された画像と、第1の時点よりも未来の第2の時点において撮影された画像とを取得する。これらの2つの画像のうち、第1の時点において撮影された画像を第1の画像とも呼び、第2の時点において撮影された画像を第2の画像とも呼ぶ。
ステップS2にて、オプティカルフロー計算手段21は、ステップS1にて取得された2つの画像に基づいてオプティカルフローを計算する。オプティカルフローは、画像上のある点の動きを表すベクトルのことである。第1の画像内のある特徴点が第2の画像において移動している場合、その移動の向きと大きさを表すオプティカルフローを計算することができる。
広角レンズを備えたカメラ3により撮影された画像から計算されるオプティカルフローには、以下のような特徴がある。
・路面の領域内の特徴点の動きは、画像中心に向かうオプティカルフローを発生させやすい。
・空の領域内の点は、特徴点になりにくいため、オプティカルフローが生じないか、又は生じたとしてもその大きさは路面領域のオプティカルフローの大きさに比べて極端に小さい。
・路面の領域内の特徴点の動きは、画像中心に向かうオプティカルフローを発生させやすい。
・空の領域内の点は、特徴点になりにくいため、オプティカルフローが生じないか、又は生じたとしてもその大きさは路面領域のオプティカルフローの大きさに比べて極端に小さい。
図4に、ステップS1にて取得された2つの画像のうちの第1の画像6を示す。符号61は路面の領域を示し、符号62は空の領域を示す。さらに、ステップS2にて計算されたオプティカルフローF1〜F8が画像6に重ね合わされている。符号F1a〜F8aはそれぞれ、オプティカルフローF1〜F8の始点である。符号F1b〜F8bはそれぞれ、オプティカルフローF1〜F8の終点である。
ステップS3にて、重心計算手段22は、オプティカルフローF1〜F8の始点F1a〜F8aが図5に示す座標平面の原点Oに一致するように、オプティカルフローF1〜F8を平行移動させる。この座標平面を、後述する重心の位置を評価するための評価用座標平面とも呼ぶ。この平行移動の前後を通じて、オプティカルフローF1〜F8の方向及び大きさは変わらない。
ステップS4にて、重心計算手段22は、評価用座標平面におけるオプティカルフローF1〜F8の終点F1b〜F8bからなる終点群の重心の座標(xg,yg)を次式にしたがって計算する。

ただし、nはオプティカルフローの数であり(本例ではn=8)、xkは第k番目のオプティカルフローの終点のx座標であり、ykは第k番目のオプティカルフローの終点のy座標である。このようにして計算された重心Gの例を図6に示す。
ステップS5にて、転針検出手段23は、評価用座標平面における重心の位置に応じて、車両が直進状態にあるのか転針状態にあるのかを判断する。重心がy軸上あるいはy軸の近傍(y軸から所定距離の範囲内)に位置している場合、車両は直進状態にあると判断される。重心がy軸の近傍に位置しておらず、かつ第一象限Q1に位置する場合、車両は車両前方を基準として右転針状態にあると判断される。重心がy軸の近傍に位置しておらず、かつ第二象限Q2に位置する場合、車両は車両前方を基準として左転針状態にあると判断される。
なお、車両が前進している限り、重心が第三象限Q3及び第四象限Q4に位置することはない。車両が右転針状態又は左転針状態にあると判断された場合、転針検出手段23は、車両が右転針状態又は左転針状態にある旨の発報をするよう、表示部4及びスピーカ5の少なくとも一方に命令を送る。
ステップS5ではさらに、転針検出手段23は、横移動速度を推定する。横移動速度とは、上記2つの画像の間の、車幅方向に沿った車両の移動速度である。
ステップS6にて、転針検出手段23は、横移動速度から横移動量を推定する。横移動量とは、上記2つの画像間の、車幅方向に沿った車両の移動量である。具体的には、上記第1の画像と上記第2の画像との間の重心の移動量を計算し、この重心移動量から車線内の自車移動量を計算する。画像上の重心移動量と車線内の自車移動量とは、一対一の対応関係にあると考えることができる。自車移動量の計算は、例えば、事前に実験を重ねて作成した参照表を使う方法が考えられる。本ステップにて推定された横移動量は、上述のメモリに記憶される。
ステップS7にて、転針検出手段23は、上記2つの画像の少なくとも一方に白線が写っているかどうかを判断する。判断結果がYesである場合、後述するステップS10が行われる。
ステップS7における判断結果がNoである場合、ステップS9にて転針検出手段23は、横移動量に基づいて白線予想位置を補正する。
ステップS10にて、転針検出手段23は、白線位置を決定する。
以下に述べるステップS11〜S14は警報発報判定と呼ばれる。ステップS11にて、転針検出手段23は、車両が車線内の発報エリアに位置しているかどうかを判断する。この判断結果がYesである場合はステップS12が行われ、さもなければステップS1に戻る。
ステップS12にて、転針検出手段23は、車両が左右の発報エリアのいずれに位置しているかを判断する。
車両が左の発報エリアに位置していると判断された場合は、ステップS13にて、左に位置している旨の発報をするよう、表示部4及びスピーカ5の少なくとも一方に命令を送る。その後、ステップS1に戻る。
車両が右の発報エリアに位置していると判断された場合は、ステップS14にて、右に位置している旨の発報をするよう、表示部4及びスピーカ5の少なくとも一方に命令を送る。その後、ステップS1に戻る。
車両が左の発報エリアに位置していると判断された場合は、ステップS13にて、左に位置している旨の発報をするよう、表示部4及びスピーカ5の少なくとも一方に命令を送る。その後、ステップS1に戻る。
車両が右の発報エリアに位置していると判断された場合は、ステップS14にて、右に位置している旨の発報をするよう、表示部4及びスピーカ5の少なくとも一方に命令を送る。その後、ステップS1に戻る。
ステップS5〜S7及びS9〜S14の処理について補足する。白線が見つかれば(ステップS7の判断結果がYESであれば)、その白線を頼りに車線上での自車位置が計算される。白線が見つからなければ(ステップS7の判断結果がNOであれば)、ステップS6にて得られた横移動量の推定値を使って、「最後に白線が見つかった時点の白線位置」と、「その時点から積算したステップS6で出力された横移動量の総和」の足し算により、現在の車線上の自車位置推定値が計算される(ステップS9)。ステップS9の計算結果を用いて、自車両に対する白線位置が更新される(ステップS10)。
[効果]
以上の実施形態は、広角レンズを備えたカメラにより撮影された画像において、オプティカルフローが車両の転針によって特徴的な変化をすることを利用するものである。この実施形態によれば、路面上の白線の有無及び形状に関わらず、すなわち画像内の路面に領域に白線が写っているかどうかとは無関係に、車両の転針を検出することができる。すなわち、ステップS1〜S5における転針の検知は路面上の白線の有無に関わらず行うことができる。
以上の実施形態は、広角レンズを備えたカメラにより撮影された画像において、オプティカルフローが車両の転針によって特徴的な変化をすることを利用するものである。この実施形態によれば、路面上の白線の有無及び形状に関わらず、すなわち画像内の路面に領域に白線が写っているかどうかとは無関係に、車両の転針を検出することができる。すなわち、ステップS1〜S5における転針の検知は路面上の白線の有無に関わらず行うことができる。
一般的には、加速度センサ、ヨーレートセンサ、舵角センサなどを用いることで車両の転針を推定することも可能である。しかし、本実施形態によれば、カメラ3以外の、車両の周囲の状態を捉えるセンサは不要である。そのため、転針検出システムの構成をシンプルにすることができ、コストも低減することができる。
[他の形態]
ステップS2におけるオプティカルフローの計算は、画像内の全領域について行うことが可能である。あるいは、画像の部分的な領域に限定してオプティカルフローを計算することもできる。部分的な領域の例を、図4の領域R1として示す。領域R1は、消失点Pを含み、かつ横長である。このように、オプティカルフローを計算する対象領域を限定することにより、画像の左右のベクトル分布の違いが後続の重心の計算に反映されやすくなり、かつ、オプティカルフローの計算量を低減することができる。
ステップS2におけるオプティカルフローの計算は、画像内の全領域について行うことが可能である。あるいは、画像の部分的な領域に限定してオプティカルフローを計算することもできる。部分的な領域の例を、図4の領域R1として示す。領域R1は、消失点Pを含み、かつ横長である。このように、オプティカルフローを計算する対象領域を限定することにより、画像の左右のベクトル分布の違いが後続の重心の計算に反映されやすくなり、かつ、オプティカルフローの計算量を低減することができる。
消失点Pの位置は、カメラ3の取付位置、光軸角度から前もって決めることができる。カーブした道路の走行中は、消失点Pの所定位置と現実の消失点の位置とが一致しない場合があるが、それをカバーできるように領域R1を定めることができる。
オプティカルフローを計算する対象領域をカメラ視野に合わせて更に小さくすることもできる。あるいは、対象領域を特異な形状にして特定の領域内のオプティカルフローのみを計算してもよい。対象領域は、カメラの視野角、電子的な歪除去の有無、自車の移動方向との関係で決まる。
ステップS3にて、重心計算手段22は、オプティカルフローF1〜F8の終点F1b〜F8bが図5に示した評価用座標平面の原点Oに一致するように、オプティカルフローF1〜F8を平行移動させることもできる。そして、ステップS4にて、重心計算手段22は、評価用座標平面におけるオプティカルフローF1〜F8の始点F1a〜F8aからなる始点群の重心の座標を計算することができる。ステップS5では、重心がy軸上あるいはy軸の近傍に位置している場合に、車両は直進状態にあると判断される。重心がy軸の近傍に位置しておらず、かつ第三象限Q3に位置する場合、車両は車両前方を基準として右転針状態にあると判断される。重心がy軸の近傍に位置しておらず、かつ第四象限Q4に位置する場合、車両は車両前方を基準として左転針状態にあると判断される。
カメラ3が車両前方を写した画像を撮影し、その画像に基づいてコントローラ2が処理を行うことも可能である。
図3に示したコントローラによる処理は、反復的に実行することができる。
前述した転針検出システム及び転針検出装置の機能的構成及び物理的構成は、前述の態様に限られるものではなく、例えば、各機能や物理資源を統合して実装したり、逆に、さらに分散して実装したりすることも可能である。
以上、本発明の実施の形態につき述べたが、本発明は既述の実施の形態に限定されるものではなく、本発明の技術的思想に基づいて各種の変形及び変更が可能である。
1 転針検出システム
2 転針検出装置
21 オプティカルフロー計算手段
22 重心計算手段
23 転針検出手段
3 カメラ
4 表示部
5 スピーカ
2 転針検出装置
21 オプティカルフロー計算手段
22 重心計算手段
23 転針検出手段
3 カメラ
4 表示部
5 スピーカ
Claims (3)
- 車両前方又は車両後方を写した2つの画像間における複数のオプティカルフローを計算するオプティカルフロー計算手段と、
前記オプティカルフロー計算手段により計算された前記オプティカルフローの始点及び終点の一方が座標平面の原点に一致するように前記オプティカルフローを平行移動させ、前記平行移動後の前記オプティカルフローの始点及び終点の他方からなる点群の重心を計算する重心計算手段と、
前記重心計算手段により計算された前記重心の位置に基づいて前記車両が転針しているかどうかを検出する転針検出手段と
を備えた転針検出装置。 - 前記オプティカルフロー計算手段は、前記画像内で部分的に特定された横長の領域においてのみ前記オプティカルフローを計算するものである、請求項1に記載の転針検出装置。
- 前記画像は広角カメラにより撮影されるものであり、
前記領域は前記画像の消失点を含むものである、請求項2に記載の転針検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017219054A JP2019091204A (ja) | 2017-11-14 | 2017-11-14 | 転針検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017219054A JP2019091204A (ja) | 2017-11-14 | 2017-11-14 | 転針検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019091204A true JP2019091204A (ja) | 2019-06-13 |
Family
ID=66836390
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017219054A Pending JP2019091204A (ja) | 2017-11-14 | 2017-11-14 | 転針検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019091204A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024027849A (ja) * | 2022-08-19 | 2024-03-01 | 株式会社デンソーテン | 情報処理装置、情報処理方法およびプログラム |
| WO2025182082A1 (ja) * | 2024-03-01 | 2025-09-04 | 株式会社ソニー・インタラクティブエンタテインメント | 自己位置推定装置、自己位置推定システム及び自己位置推定プログラム |
-
2017
- 2017-11-14 JP JP2017219054A patent/JP2019091204A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024027849A (ja) * | 2022-08-19 | 2024-03-01 | 株式会社デンソーテン | 情報処理装置、情報処理方法およびプログラム |
| JP7512330B2 (ja) | 2022-08-19 | 2024-07-08 | 株式会社デンソーテン | 情報処理装置、情報処理方法およびプログラム |
| WO2025182082A1 (ja) * | 2024-03-01 | 2025-09-04 | 株式会社ソニー・インタラクティブエンタテインメント | 自己位置推定装置、自己位置推定システム及び自己位置推定プログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6453192B2 (ja) | 画像認識処理装置、及びプログラム | |
| JP5949861B2 (ja) | 車両の接近物体検出装置及び車両の接近物体検出方法 | |
| JP6003673B2 (ja) | 3次元位置推定装置、車両制御装置、および3次元位置推定方法 | |
| US20170146796A1 (en) | Vehicular display apparatus and vehicular display method | |
| JP2016013793A (ja) | 画像表示装置、画像表示方法 | |
| JP2016009251A (ja) | 車両用制御装置 | |
| WO2016092967A1 (ja) | 画像生成装置及び画像生成方法 | |
| JP6241172B2 (ja) | 自車位置推定装置及び自車位置推定方法 | |
| JP2019091204A (ja) | 転針検出装置 | |
| JP5832850B2 (ja) | 車線監視システム及び車線監視方法 | |
| JP2019020171A (ja) | 車幅検出装置、車幅検出方法、およびプログラム | |
| JP2012256159A (ja) | 接近物検知装置および接近物検知方法 | |
| JP2011209070A (ja) | 画像処理装置 | |
| JP2018005811A (ja) | 車両の接近物体検出装置 | |
| JP7226930B2 (ja) | キャリブレーション装置及び電子ミラーシステム | |
| JP2018200701A (ja) | 車両用制御装置 | |
| JP5874411B2 (ja) | 車両周辺監視装置 | |
| JP2005301892A (ja) | 複数のカメラによるレーン認識装置 | |
| JP2004038760A (ja) | 車両用走行路認識装置 | |
| JP5529058B2 (ja) | 立体物検知装置および立体物検知方法 | |
| JP4598011B2 (ja) | 車両用表示装置 | |
| JP7209442B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP6564682B2 (ja) | 対象物検出装置、対象物検出方法、及び、対象物検出プログラム | |
| CN104554269B (zh) | 感兴趣区域设定装置及其方法 | |
| JP6048384B2 (ja) | 画像判定装置 |