JP2019093405A - 鉄筋曲げ装置 - Google Patents
鉄筋曲げ装置 Download PDFInfo
- Publication number
- JP2019093405A JP2019093405A JP2017223747A JP2017223747A JP2019093405A JP 2019093405 A JP2019093405 A JP 2019093405A JP 2017223747 A JP2017223747 A JP 2017223747A JP 2017223747 A JP2017223747 A JP 2017223747A JP 2019093405 A JP2019093405 A JP 2019093405A
- Authority
- JP
- Japan
- Prior art keywords
- reinforcing bar
- clamp
- rebar
- bending
- operation control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Manipulator (AREA)
- Bending Of Plates, Rods, And Pipes (AREA)
Abstract
Description
その上、前記鉄筋曲げ操作制御において、鉄筋をその軸心回りに所定角度回動させるのに、一方の前記クランプ部と他方の前記クランプ部で鉄筋をクランプしながら、回動操作時に一方のクランプ部で回動操作すると同時に、他方のクランプ部の挟持圧を一方のクランプ部よりも小にするか、又は、他方のクランプ部を非挟持状態にして鉄筋のその軸心回りの回動を許容するように制御する第1鉄筋回動操作制御を、前記第1制御手段に設けたことにより、鉄筋を3次元構造に曲げ加工できる。
つまり、第1鉄筋回動操作制御を設けることで、鉄筋は一対のクランプ部によって鉄筋を安定支持しながら鉄筋をその軸心回りに回動操作を行うことが出来、その鉄筋が軸心回りに回動操作されることで、鉄筋の曲げ加工された部分の先端側の向きが自在に変更されて、3次元形状に曲げ加工できる。
従って、鉄筋曲げ機と一対のロボットアーム装置によって、人手操作で行う曲げ加工に比べて、高精度な製品を安定して提出できる。
従って、人手による曲げ加工に比べてより複雑な形状の曲げ加工を、安定して安全に行えるようになる。
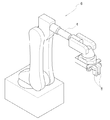
図1〜図2に示すように、鉄筋を曲げ加工するために、上下方向に軸心を沿わせてある支点ローラーから成る支点部1と、その支点部1周りに回動して鉄筋を屈曲させる回動ローラーから成る力点部2とを設けた鉄筋横曲げ用の鉄筋曲げ機3を設け、その鉄筋曲げ機3に対して、遠近移動及び上下左右に搖動操作自在なアーム4と、そのアーム4の先端側で鉄筋をクランプ操作自在なクランプ部5とを設けたロボットアーム装置6を、横方向に一対並べて設け、鉄筋曲げ機3に対して複数本の鉄筋を、個別に順次提供できるように搬送する鉄筋搬送装置7を設けて、鉄筋曲げ装置を構成してある。
尚、鉄筋曲げ操作においては、支点部1と力点部2との間に鉄筋を配置して支点部1周りの力点部2の回動操作で鉄筋を曲げるのであるが、鉄筋曲げ時の反力を受ける反力受部8を鉄筋曲げ機3には設けてある。従って、鉄筋を鉄筋曲げ機3に供給する際には、支点部1と反力受部8との間に鉄筋を供給配置する。
以下に他の実施の形態を説明する。
〈1〉 前記一対のロボットアーム装置6の夫々のクランプ部5R、5Lで鉄筋を軸心回りに回動させたり、持ち替えたりする操作制御は、上記の曲げ加工形状の例に限らず、加工予定の3次元形状によって種々様々に変更して実施しても良い。
2 力点部
3 鉄筋曲げ機
4 アーム
5 クランプ部
6 ロボットアーム装置
Claims (2)
- 鉄筋を曲げ加工するために、支点部と、その支点部周りに回動して鉄筋を屈曲させる力点部とを設けた鉄筋曲げ機を設け、
前記鉄筋曲げ機に対して遠近移動及び上下左右に搖動操作自在なアームと、そのアームの先端側で鉄筋をクランプ操作自在なクランプ部とを設けたロボットアーム装置を一対設け、
前記鉄筋曲げ機に対して鉄筋を、前記一対のロボットアーム装置における一方の前記クランプ部と他方の前記クランプ部とによってクランプして供給する鉄筋供給操作制御と、
前記鉄筋曲げ機に供給した鉄筋の先端側曲げ予定箇所とは異なる基端側固定個所を、少なくとも一つの前記クランプ部によってクランプしたまま前記鉄筋曲げ機による曲げ作動を行う鉄筋曲げ操作制御と、
前記クランプ部によってクランプしている鉄筋を、前記鉄筋曲げ機から取り出す鉄筋取り出し操作制御とを行う第1制御手段を設け、
前記鉄筋曲げ操作制御において、鉄筋をその軸心回りに所定角度回動させるのに、一方の前記クランプ部と他方の前記クランプ部で鉄筋をクランプしながら、回動操作時に一方のクランプ部で回動操作すると同時に、他方のクランプ部の挟持圧を一方のクランプ部よりも小にするか、又は、他方のクランプ部を非挟持状態にして鉄筋のその軸心回りの回動を許容するように制御する第1鉄筋回動操作制御を、前記第1制御手段に設けてある鉄筋曲げ装置。 - 前記鉄筋曲げ操作制御において、前記第1鉄筋回動操作制御によって鉄筋を曲げ操作した後に、鉄筋を更にその軸心回りに所定角度回動させるのに、
鉄筋の基端側を一方の前記クランプ部でクランプしたまま、他方の前記クランプ部で曲げた先端側を掴みかえて、回動操作時に他方の前記クランプ部で回動操作すると同時に、一方の前記クランプ部の挟持圧を他方の前記クランプ部よりも小にするか、又は、一方の前記クランプ部を非挟持状態にして鉄筋のその軸心回りの回動を許容するように制御する第2鉄筋回動操作制御を前記第1制御手段に設けてある請求項1に記載の鉄筋曲げ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017223747A JP6984880B2 (ja) | 2017-11-21 | 2017-11-21 | 鉄筋曲げ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017223747A JP6984880B2 (ja) | 2017-11-21 | 2017-11-21 | 鉄筋曲げ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019093405A true JP2019093405A (ja) | 2019-06-20 |
| JP6984880B2 JP6984880B2 (ja) | 2021-12-22 |
Family
ID=66970562
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017223747A Active JP6984880B2 (ja) | 2017-11-21 | 2017-11-21 | 鉄筋曲げ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6984880B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115030562A (zh) * | 2022-06-30 | 2022-09-09 | 中国建筑第五工程局有限公司 | 一种住宅叠合楼板用支撑装置 |
| CN120115617A (zh) * | 2025-03-26 | 2025-06-10 | 中交一公局集团有限公司 | 一种盖梁钢筋骨架智能生产加工设备 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61172623A (ja) * | 1985-01-28 | 1986-08-04 | Usui Internatl Ind Co Ltd | 金属管の自動曲げ加工方法及びその装置 |
| JPH0335820A (ja) * | 1989-06-30 | 1991-02-15 | Chuo Electric Mfg Co Ltd | 曲げ加工装置 |
| JP2007508144A (ja) * | 2003-08-05 | 2007-04-05 | ローゼンベルガー アーゲー | 加工部材の曲げ加工方法 |
| JP2008036676A (ja) * | 2006-08-07 | 2008-02-21 | Opton Co Ltd | 曲げ加工装置 |
| JP2014000646A (ja) * | 2012-06-20 | 2014-01-09 | Yaskawa Electric Corp | ロボットシステムおよび嵌合物の製造方法 |
| JP2016159331A (ja) * | 2015-03-02 | 2016-09-05 | 株式会社オプトン | 曲げ加工装置 |
-
2017
- 2017-11-21 JP JP2017223747A patent/JP6984880B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61172623A (ja) * | 1985-01-28 | 1986-08-04 | Usui Internatl Ind Co Ltd | 金属管の自動曲げ加工方法及びその装置 |
| JPH0335820A (ja) * | 1989-06-30 | 1991-02-15 | Chuo Electric Mfg Co Ltd | 曲げ加工装置 |
| JP2007508144A (ja) * | 2003-08-05 | 2007-04-05 | ローゼンベルガー アーゲー | 加工部材の曲げ加工方法 |
| JP2008036676A (ja) * | 2006-08-07 | 2008-02-21 | Opton Co Ltd | 曲げ加工装置 |
| JP2014000646A (ja) * | 2012-06-20 | 2014-01-09 | Yaskawa Electric Corp | ロボットシステムおよび嵌合物の製造方法 |
| JP2016159331A (ja) * | 2015-03-02 | 2016-09-05 | 株式会社オプトン | 曲げ加工装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115030562A (zh) * | 2022-06-30 | 2022-09-09 | 中国建筑第五工程局有限公司 | 一种住宅叠合楼板用支撑装置 |
| CN115030562B (zh) * | 2022-06-30 | 2024-02-06 | 中国建筑第五工程局有限公司 | 一种住宅叠合楼板用支撑装置 |
| CN120115617A (zh) * | 2025-03-26 | 2025-06-10 | 中交一公局集团有限公司 | 一种盖梁钢筋骨架智能生产加工设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6984880B2 (ja) | 2021-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6654351B2 (ja) | 曲げ加工装置 | |
| JP5949917B2 (ja) | ロボットシステムおよび加工品の製造方法 | |
| JP6630681B2 (ja) | 完成された曲げ機及びそれに対応する方法 | |
| TWI317314B (en) | Automatic tool changing method and device for machine tool controlled by numerical controller | |
| KR102013459B1 (ko) | 로봇 제어 방법 | |
| CN106737770B (zh) | 算出机器人的可动作范围的机器人的手动进给装置 | |
| JP6619560B2 (ja) | 曲げ加工装置 | |
| JP5921228B2 (ja) | 起立動作支援ロボット | |
| US9974426B2 (en) | Master-slave system for moving slave unit based on motion commands inputted into two command input units held by each hand of operator | |
| JP2019093405A (ja) | 鉄筋曲げ装置 | |
| JP2016124065A (ja) | 双腕ロボットの教示システム及び双腕ロボットの教示方法 | |
| CN103659805A (zh) | 机器人和机器人系统 | |
| JP6101454B2 (ja) | ワーク加工装置及び該ワーク加工装置における金型の移動方法 | |
| TW201505735A (zh) | 彎曲加工系統 | |
| WO2018155688A1 (ja) | ロボット及びロボットシステム | |
| EP2014382A1 (en) | Tube bending machine | |
| JP7149267B2 (ja) | 把持システム | |
| JP6825134B2 (ja) | 制御装置、ワーク作業装置、ワーク作業システム及び制御方法 | |
| JP5405879B2 (ja) | 曲げ加工装置 | |
| JP2015179733A (ja) | 巻線装置、および巻線方法 | |
| JP7153335B2 (ja) | 手術支援装置 | |
| JP2019093404A (ja) | 鉄筋曲げ装置 | |
| CN102729131A (zh) | 用于研磨连续铸造工件的装置 | |
| WO2010136941A1 (en) | Wood processing apparatus | |
| TWM377280U (en) | Machine with robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210825 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211102 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211117 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6984880 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |