JP2019095228A - 車輪形状測定方法 - Google Patents
車輪形状測定方法 Download PDFInfo
- Publication number
- JP2019095228A JP2019095228A JP2017222684A JP2017222684A JP2019095228A JP 2019095228 A JP2019095228 A JP 2019095228A JP 2017222684 A JP2017222684 A JP 2017222684A JP 2017222684 A JP2017222684 A JP 2017222684A JP 2019095228 A JP2019095228 A JP 2019095228A
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- flange
- frame
- profile data
- cross
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000691 measurement method Methods 0.000 title claims abstract description 10
- 230000001678 irradiating effect Effects 0.000 claims abstract description 6
- 238000000034 method Methods 0.000 claims description 23
- 238000003384 imaging method Methods 0.000 claims description 9
- 238000012545 processing Methods 0.000 claims description 4
- 238000004364 calculation method Methods 0.000 abstract description 9
- 238000000605 extraction Methods 0.000 abstract 1
- 238000005259 measurement Methods 0.000 description 24
- 238000001514 detection method Methods 0.000 description 13
- 238000003801 milling Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000007689 inspection Methods 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 206010012411 Derailment Diseases 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000004441 surface measurement Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000003776 cleavage reaction Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000001915 proofreading effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images









Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description
このため、被測定物である車両が走行している状態で測定を行うためには、ラインレーザ光がちょうど車輪中心軸に一致したときのタイミングでカメラ撮影を行わなければならず、撮影タイミングや車輪の測定位置がずれた場合に測定値に誤差が生じ、精度の良い測定を行うことが困難であった。
走行する車両の車輪の基準溝を含むバック面、フランジ先端及びレール頭頂部をカバーする内側範囲、および車輪のリム面、踏面、前記フランジ先端及び前記レール頭頂部をカバーする外側範囲に対して2方向から、少なくとも前記車輪の基準部を通過するようにして、レールに対し所定の仰角でライン状のレーザ光を照射するステップと、
走行する前記車輪を連続的に撮影し、前記レーザ光が照射された位置の車輪断面プロファイルデータをフレームごとに出力するステップと、
前記フレーム毎に前記レール頭頂部と前記基準部との間の被測定距離を求めるステップと、
前記複数のフレームのうち、前記被測定距離が基準値に対して所定範囲内に含まれるときに撮影されたフレームを選択するステップと、
前記選択されたフレームにおける車輪断面プロファイルデータに基づいて、車輪各部の寸法を算出するステップと、
を有することにより達成される。
走行する車両の車輪のバック面及びフランジ先端をカバーする内側範囲、および車輪のリム面、踏面および前記フランジ先端をカバーする外側範囲に対して2方向から、レールに対し所定の仰角でライン状のレーザ光を照射するステップと、
走行する前記車輪を連続的に撮影し、前記レーザ光が照射された位置の車輪断面プロファイルデータをフレームごとに出力するステップと、
前記複数のフレームのうち、前記レーザ光の伝搬面が前記車輪の中心位置に最も近くなるときに撮影されたフレームを選択するステップと、
少なくとも前記選択されたフレームにおける車輪断面プロファイルデータに基づいて、車輪各部の寸法を算出するステップと、
を有することにより達成される。
上記した以外の課題、構成及び効果は、以下の実施の形態の説明により明らかにされる。
ここで、「3Dプロファイルカメラ」とは、撮影した被写体の画素に対応して、座標情報(プロファイルデータという)を出力できるカメラをいう。
また、本明細書で用いる「真断面」とは、車軸の中心を通る面で車輪を切断した際に得られる車輪の仮想断面をいう。さらに、本明細書で用いる「レーザ光の伝搬面」とは、車輪の表面に投射されたラインレーザ光が車輪の内部まで透過すると仮定した場合における該レーザ光が伝搬する面をいう。
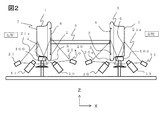
本発明の車輪形状測定方法を実行する測定装置の構成について、以下に説明する。図1は、本発明になる鉄道車両用の車輪形状測定装置における各センサや使用機器の設置状況とともにシステム構成を示す概略上面図となっている。図2は、図1におけるレーザプロジェクタと3Dプロファイルカメラ、車輪との配置関係を示す概略正面図である。図3は、校正作業を示す概略図である。図4は、車輪測定のための各機器の制御を行うために必要な各光電センサの設置位置を示す図である。なお、図1〜3は、車両の検修場においてレール100の下方に測定装置を設置した態様を示しているが、本実施形態にかかる測定装置は、検修場外のレールに沿って配置されていてもよい。
なお、本出願において「連続的に撮影する」とは、図10に示されるように、進行する車輪に対して、一定時間毎に、あるいは任意の時間間隔をおいて、複数の撮影タイミングで静止画像を連写、または動画を撮影することを意味する。
測定前に行う3Dプロファイルカメラ10,11及びレーザプロジェクタ20,21の校正について説明する。3Dプロファイルカメラから出力されるプロファイルデータは、個々の3Dプロファイルカメラを基準として画素ごとに座標を持っており、撮影されたフレーム上の画素間の距離を算出できる。但し、正しい距離を算出するには、この座標をカメラ共通の座標系に合わせて変換する必要がある。これを校正という。
図4において、一対のセンサ30,31は、車輪1のフランジが通過したことを検知して制御コントローラ40に信号を出力するための光電センサであり、レール100の長手方向に沿って配置されている。一方、センサ32は車体6の進行方向端を検知して制御コントローラ40に信号を出力するための光電センサであり、センサ30,31の中間位置に、それぞれに対してレール100の長手方向に距離aだけ離間して配置されている。かかるセンサ31〜33を設ける場合には、センサを挟んで上述の測定装置を2つ設けることとする(図1,4では一方のみ図示)。
第1の実施形態による測定方法を説明する。まず、車輪の幾何学的関係について説明する。図5は、車輪真断面プロファイルデータを検出する際に用いる幾何学的関係を示す図である。図6は、算出する車輪測定部位の数値関係を示す図である。
α=β−h/2 (1)
β=D/(2・sinθ) (2)
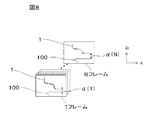
以下、本実施の形態の測定装置の動作について説明する。図7は、演算装置41で行われる動作を示すフローチャート図である。図8は、3Dプロファイルカメラから出力された車輪断面プロファイルデータをフレームごとに可視化して示す図である。
なお、本実施の形態では、比較的検出しやすいことから基準部としてフランジ先端とレール頭頂部との間の距離を用いて真断面に対応するフレームを求めたが、例えば基準部の別例として基準溝2(図6参照)とレール頭頂部との間の距離を用いてもよい。
さらに以下に述べる第2の実施の形態では、より精度良く真断面の位置を求めることができる。第2の実施の形態は最初から実行してもよいが、第1の実施の形態の測定において│α(m)―SV│<δの条件を満たすフレームが複数枚生じたとき、かかる条件を満たすフレームのみ、図9(b)に示す演算を行ってもよい。尚、本実施形態でも、図1〜3に示す測定装置を用いることとし、その構成および校正についての説明は省略する。
本実施形態の画像処理の説明を行う。図9は、制御コントローラ40および演算装置41で行われる動作を示すフローチャート図である。図10は、走行している車両の車輪1に車輪外側のラインレーザ光21aが連続的に照射された状態で、3Dプロファイルカメラ11が車輪断面プロファイルデータ1aを取得するタイミング(点線または一点鎖線)を示す側面図である。図示していないが、その他の3Dプロファイルカメラとレーザプロジェクタの関係も同様である。図11は、3Dプロファイルカメラから出力された車輪断面プロファイルデータをフレームごとに可視化して示す図である。
以下、本測定装置の動作について説明する。
制御コントローラ40は、車体検知用のセンサ32が車体6を検知したタイミングで、レーザプロジェクタ20、21を駆動制御して、ラインレーザ光20a、21aを走行する車輪1の外側範囲と内側範囲とに照射する。
図9(a)のステップS01において、3Dプロファイルカメラ10、11によりNフレームの撮影を行った後、ステップS02において、演算装置41は、車輪断面プロファイルデータに基づいて、各フレームごとにフランジ像高さを求める。ここではサンプル数がNフレーム(車両の速度が遅ければNは増大する)であるので、図11に示すように、N個のフランジ像高さ(fh(1)〜fh(N))が得られることとなるから、これらを記憶する。以上で撮影動作を終了する。
次に、演算装置41は、記憶したフランジ像高さ同士を比較してゆく。より具体的には、演算装置41は、図9(b)のステップS03にてn=1とし、ステップS04において、fh(n)<fh(n+1)であるか否かを判断する。演算装置41がfh(n)<fh(n+1)でないと判断すれば(ステップS04の判断No)、fh(n)が最小値ではないから比較動作を継続する必要があることがわかる。
以上の実施の形態では、n番目のフレームにおけるフランジ像高さfh(n)に基づいて真断面を決定していたが、真断面の位置に対して撮影タイミングがわずかにずれる可能性があり、また車輪真断面プロファイルデータにノイズが生じる可能性もある。かかる不具合を解消もしくは緩和するため、フランジ像高さfh(n)が最も低い場合、n番目のフレームを基準として、その前後のフレームの車輪断面プロファイルデータを平均化した値を用いて、車輪寸法算出を行ってもよい。平均化に用いるフレーム数は任意である。
1a …車輪断面プロファイルデータ
2 …基準溝
3 …フランジ
4 …踏面
5 …車輪中心
6 …車体
7 …リム面
8 …バック面
10 …車輪内側の3Dプロファイルカメラ
11 …車輪外側の3Dプロファイルカメラ
20 …車輪内側のレーザプロジェクタ
20a …車輪内側に向かう細線状のレーザ光(ラインレーザ光)
21 …車輪外側のレーザプロジェクタ
21a …車輪外側に向かう細線状のレーザ光(ラインレーザ光)
30 …車輪検知用の光電センサ
31 …車輪検知用の光電センサ
32 …車体検知用の光電センサ
40 …制御コントローラ(PLC)
41 …演算装置(PC)
100 …レール
h …フランジ径
D …車輪径
θ …レールに対するラインレーザ光の仰角
β …レールから車輪中心までのラインレーザ光照射距離
α …フランジ先端からレール頭頂部までの距離
dw …車輪径
fh …フランジ高さ
ft …フランジ厚さ
BG …内面距離
Claims (9)
- 走行する車両の車輪の基準溝を含むバック面、フランジ先端及びレール頭頂部をカバーする内側範囲、および車輪のリム面、踏面、前記フランジ先端及び前記レール頭頂部をカバーする外側範囲に対して2方向から、少なくとも前記車輪の基準部を通過するようにして、レールに対し所定の仰角でライン状のレーザ光を照射するステップと、
走行する前記車輪を連続的に撮影し、前記レーザ光が照射された位置の車輪断面プロファイルデータをフレームごとに出力するステップと、
前記フレーム毎に前記レール頭頂部と前記基準部との間の被測定距離を求めるステップと、
前記複数のフレームのうち、前記被測定距離が基準値に対して所定範囲内に含まれるときに撮影されたフレームを選択するステップと、
前記選択されたフレームにおける車輪断面プロファイルデータに基づいて、車輪各部の寸法を算出するステップと、
を有すること
を特徴とする車輪形状測定方法。 - 前記基準部とは前記フランジ先端であること
を特徴とする請求項1に記載の車輪形状測定方法。 - 前記被測定距離が前記基準値に対して前記所定範囲内に含まれるときに撮影されたフレームが複数枚存在するときは、前記車輪断面プロファイルデータに基づいて、前記フレームごとに前記踏面から前記フランジ先端までのフランジ像高さを算出し、前記フランジ像高さが最も短くなるフレームを選択すること
を特徴とする請求項1又は2に記載の車輪形状測定方法。 - 走行する車両の車輪のバック面及びフランジ先端をカバーする内側範囲、および車輪のリム面、踏面および前記フランジ先端をカバーする外側範囲に対して2方向から、レールに対し所定の仰角でライン状のレーザ光を照射するステップと、
走行する前記車輪を連続的に撮影し、前記レーザ光が照射された位置の車輪断面プロファイルデータをフレームごとに出力するステップと、
前記複数のフレームのうち、前記レーザ光の伝搬面が前記車輪の中心位置に最も近くなるときに撮影されたフレームを選択するステップと、
少なくとも前記選択されたフレームにおける車輪断面プロファイルデータに基づいて、車輪各部の寸法を算出するステップと、
を有することを特徴とする車輪形状測定方法。 - 前記車輪断面プロファイルデータに基づいて、前記フレームごとに前記踏面からフランジ先端までのフランジ像高さを算出し、前記フランジ像高さが最も短くなるフレームを、前記レーザ光の伝搬面が前記車輪の中心位置に最も近くなるときに撮影されたフレームとして選択すること
を特徴とする請求項4に記載の車輪形状測定方法。 - 前記外側範囲に照射されるレーザ光の波長と、前記内側範囲に照射されるレーザ光の波長とを異ならせていること
を特徴とする請求項1〜5のいずれか1項に記載の車輪形状測定方法。 - 前記車輪断面プロファイルデータは、水平方向をx軸とし、前記撮影を行うカメラから見た奥行き方向をz0軸とした座標系の数値に変換されて用いられること
を特徴とする請求項1〜6のいずれか1項に記載の車輪形状測定方法。 - 前記レーザ光を照射する複数のレーザ光源と、前記撮影を行う複数のカメラとを、同一の基準体を用いて校正し、それにより得られた共通の座標系に基づいて前記車輪断面プロファイルデータを処理すること
を特徴とする請求項1〜7のいずれか1項に記載の車輪形状測定方法。 - 前記レールに沿って配置された、前記車輪を検出する2つのセンサと、前記車両を検出する1つのセンサとを用いて、前記車両の進行方向を検出すること
を特徴とする請求項1〜8のいずれか1項に記載の車輪形状測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017222684A JP7010672B2 (ja) | 2017-11-20 | 2017-11-20 | 車輪形状測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017222684A JP7010672B2 (ja) | 2017-11-20 | 2017-11-20 | 車輪形状測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019095228A true JP2019095228A (ja) | 2019-06-20 |
| JP7010672B2 JP7010672B2 (ja) | 2022-01-26 |
Family
ID=66971346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017222684A Active JP7010672B2 (ja) | 2017-11-20 | 2017-11-20 | 車輪形状測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7010672B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111595263A (zh) * | 2020-05-26 | 2020-08-28 | 马鞍山市雷狮轨道交通装备有限公司 | 一种便携式车轮几何参数测量系统及方法 |
| CN112611574A (zh) * | 2020-11-30 | 2021-04-06 | 重庆长安汽车股份有限公司 | 一种车辆轴距测量方法 |
| CN113483684A (zh) * | 2021-07-02 | 2021-10-08 | 桂林理工大学 | 一种轨距在线测量系统 |
| CN114370824A (zh) * | 2021-12-30 | 2022-04-19 | 北京无线电计量测试研究所 | 车轮直径测量装置及测量方法 |
| CN114426039A (zh) * | 2022-03-14 | 2022-05-03 | 浙江师范大学 | 一种基于城轨列车车轮踏面的点云数据处理方法 |
| RU2794231C1 (ru) * | 2022-04-27 | 2023-04-13 | Общество с ограниченной ответственностью "ОПТИМА+" | Устройство для лазерного сканирования колесной пары движущегося локомотива |
| CN116331291A (zh) * | 2023-03-02 | 2023-06-27 | 中国铁建重工集团股份有限公司 | 轮对检测方法及设备 |
| CN117123931A (zh) * | 2023-07-31 | 2023-11-28 | 济南邦德激光股份有限公司 | 一种基于机器视觉的管材寻中方法和激光切割方法 |
| CN118293818A (zh) * | 2023-01-04 | 2024-07-05 | 株洲中车时代电气股份有限公司 | 一种图像处理方法、车轮尺寸动态检测方法、装置及系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001216544A (ja) * | 2000-02-02 | 2001-08-10 | Nabco Ltd | 逆通行防止ゲート装置 |
| JP2002319013A (ja) * | 2001-04-18 | 2002-10-31 | Yasunao Fukushima | 光電子(光電)センサによる在室管理システム |
| JP2013205045A (ja) * | 2012-03-27 | 2013-10-07 | Toshiba Transport Eng Inc | 車輪形状計測装置 |
| JP2015179041A (ja) * | 2014-03-19 | 2015-10-08 | 東芝トランスポートエンジニアリング株式会社 | 車輪形状計測装置および車輪形状計測方法 |
-
2017
- 2017-11-20 JP JP2017222684A patent/JP7010672B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001216544A (ja) * | 2000-02-02 | 2001-08-10 | Nabco Ltd | 逆通行防止ゲート装置 |
| JP2002319013A (ja) * | 2001-04-18 | 2002-10-31 | Yasunao Fukushima | 光電子(光電)センサによる在室管理システム |
| JP2013205045A (ja) * | 2012-03-27 | 2013-10-07 | Toshiba Transport Eng Inc | 車輪形状計測装置 |
| JP2015179041A (ja) * | 2014-03-19 | 2015-10-08 | 東芝トランスポートエンジニアリング株式会社 | 車輪形状計測装置および車輪形状計測方法 |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111595263B (zh) * | 2020-05-26 | 2024-04-26 | 马鞍山市雷狮轨道交通装备有限公司 | 一种便携式车轮几何参数测量系统及方法 |
| CN111595263A (zh) * | 2020-05-26 | 2020-08-28 | 马鞍山市雷狮轨道交通装备有限公司 | 一种便携式车轮几何参数测量系统及方法 |
| CN112611574A (zh) * | 2020-11-30 | 2021-04-06 | 重庆长安汽车股份有限公司 | 一种车辆轴距测量方法 |
| CN112611574B (zh) * | 2020-11-30 | 2022-08-09 | 重庆长安汽车股份有限公司 | 一种车辆轴距测量方法 |
| CN113483684A (zh) * | 2021-07-02 | 2021-10-08 | 桂林理工大学 | 一种轨距在线测量系统 |
| CN114370824A (zh) * | 2021-12-30 | 2022-04-19 | 北京无线电计量测试研究所 | 车轮直径测量装置及测量方法 |
| CN114370824B (zh) * | 2021-12-30 | 2024-06-04 | 北京无线电计量测试研究所 | 车轮直径测量装置及测量方法 |
| CN114426039A (zh) * | 2022-03-14 | 2022-05-03 | 浙江师范大学 | 一种基于城轨列车车轮踏面的点云数据处理方法 |
| RU2794231C1 (ru) * | 2022-04-27 | 2023-04-13 | Общество с ограниченной ответственностью "ОПТИМА+" | Устройство для лазерного сканирования колесной пары движущегося локомотива |
| RU2794230C1 (ru) * | 2022-08-29 | 2023-04-13 | Общество с ограниченной ответственностью "ОПТИМА+" | Способ лазерного сканирования колесной пары движущегося локомотива |
| CN118293818A (zh) * | 2023-01-04 | 2024-07-05 | 株洲中车时代电气股份有限公司 | 一种图像处理方法、车轮尺寸动态检测方法、装置及系统 |
| CN116331291A (zh) * | 2023-03-02 | 2023-06-27 | 中国铁建重工集团股份有限公司 | 轮对检测方法及设备 |
| CN117123931A (zh) * | 2023-07-31 | 2023-11-28 | 济南邦德激光股份有限公司 | 一种基于机器视觉的管材寻中方法和激光切割方法 |
| RU2818377C1 (ru) * | 2023-12-27 | 2024-05-02 | Закрытое акционерное общество "ПИК ПРОГРЕСС" | Устройство и способ для контроля геометрических параметров движущейся колесной пары железнодорожного транспорта |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7010672B2 (ja) | 2022-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7010672B2 (ja) | 車輪形状測定方法 | |
| US10895451B2 (en) | Structured light based wheel multiple parameter online measurement system and measurement method thereof | |
| CN104024081B (zh) | 铁轨的位移检测装置 | |
| EP3141449B1 (en) | Rail profile monitoring, e.g. geometry of the frogs | |
| JP5771632B2 (ja) | 円筒体の輪郭形状を測定するための方法及び装置 | |
| JP6317621B2 (ja) | 車両に装備された車輪の三次元形状測定方法と車両に装備された車輪の三次元形状測定装置 | |
| US20200124406A1 (en) | Method for referencing a plurality of sensors and associated measuring device | |
| US10704897B2 (en) | Method for detecting shape of butt joint of welded steel pipe, and quality control method and apparatus for welded steel pipes using the shape detecting method | |
| US11247705B2 (en) | Train wheel measurement process, and associated system | |
| JP7227442B2 (ja) | 車両寸法測定装置及び車両寸法測定方法 | |
| WO2019100810A1 (zh) | 辐射图像校正方法和校正装置及校正系统 | |
| JP2008292278A (ja) | 距離検出装置の光学ずれ検出方法及び距離検出装置 | |
| JP2010169505A (ja) | パンタグラフ高さ測定装置及びそのキャリブレーション方法 | |
| JP2006118901A (ja) | 車輪形状測定装置 | |
| JP3486239B2 (ja) | 軌道狂い測定装置及び方法並びに曲率測定方法 | |
| JP2015179041A (ja) | 車輪形状計測装置および車輪形状計測方法 | |
| CN108693514B (zh) | 对距离图像的异常进行检测的拍摄装置 | |
| JP6888595B2 (ja) | レールの検査装置及び検査台車 | |
| CN104321614A (zh) | 用于测定测量站的至少一条路轨的定向的方法以及用于执行该方法的设备 | |
| JP2011033428A (ja) | パンタグラフ高さ測定装置 | |
| JP2012007950A (ja) | 車両寸法測定方法及び装置 | |
| US10619995B2 (en) | Dimension measuring device and method | |
| JP6611691B2 (ja) | 鉄道車両の外形形状測定方法及び装置 | |
| JP5612905B2 (ja) | 車輪形状計測装置、車輪形状計測方法、および車輪形状計測プログラム | |
| JP2016024067A (ja) | 計測方法および計測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200901 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210810 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210928 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211221 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220113 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7010672 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |