JP2019097475A - 特定装置、特定方法、及びプログラム - Google Patents
特定装置、特定方法、及びプログラム Download PDFInfo
- Publication number
- JP2019097475A JP2019097475A JP2017231527A JP2017231527A JP2019097475A JP 2019097475 A JP2019097475 A JP 2019097475A JP 2017231527 A JP2017231527 A JP 2017231527A JP 2017231527 A JP2017231527 A JP 2017231527A JP 2019097475 A JP2019097475 A JP 2019097475A
- Authority
- JP
- Japan
- Prior art keywords
- livestock
- standard deviation
- abnormality
- cow
- measurement data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
【解決手段】家畜の異常を特定する特定装置であって、前記家畜に装着された加速度センサが測定した加速度データを記憶する記憶手段と、所定の時間の間における1以上の加速度データを前記記憶手段から取得する第1の取得手段と、前記第1の取得手段により取得された前記1以上の加速度データに基づいて、標準偏差を算出する第1の算出手段と、前記第1の算出手段により算出された前記標準偏差から所定の指標値を算出する第2の算出手段と、前記第2の算出手段により算出された前記指標値が、予め設定された所定の閾値を超えている場合、前記家畜に異常が発生したことを特定する第1の特定手段と、を有することを特徴とする。
【選択図】図4
Description
<全体構成>
まず、牛の起立困難等の異常を特定する特定システム1の全体構成について、図1を参照しながら説明する。図1は、第一の実施形態に係る特定システムの全体構成の一例を示す図である。
ここで、本実施形態に係る測定データ記憶部200に記憶されている測定データについて、図2を参照しながら説明する。図2は、第一の実施形態に係る測定データ記憶部200に記憶されている測定データの一例を示す図である。なお、特定装置10は、タグ20から測定データを受信した場合、特定処理部100により、受信した測定データを測定データ記憶部200に記憶(蓄積)させれば良い。
次に、本実施形態に係る特定処理部100の機能構成について、図3を参照しながら説明する。図3は、本実施形態に係る特定処理部100の機能構成の一例を示す図である。
以降では、牛に発生した異常を特定する処理について、図4を参照しながら説明する。図4は、第一の実施形態に係る異常特定処理の一例を示すフローチャートである。なお、図4に示す処理は、例えば、10分間毎に繰り返し実行される。ただし、10分は一例であって、任意の時間毎に繰り返し実行されても良い。
次に、第二の実施形態について説明する。第二の実施形態では、気圧データを用いることで、より高い精度で牛の異常を特定する場合について説明する。なお、第二の実施形態では、主に、第一の実施形態との相違点について説明し、第一の実施形態と同一の構成要素についてはその説明を省略する。
まず、本実施形態に係る特定システム1について、図7を参照しながら説明する。図7は、第二の実施形態に係る特定システム1の全体構成の一例を示す図である。
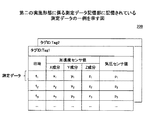
ここで、本実施形態に係る測定データ記憶部200に記憶されている測定データについて、図8を参照しながら説明する。図8は、第二の実施形態に係る測定データ記憶部200に記憶されている測定データの一例を示す図である。
次に、本実施形態に係る特定処理部100の機能構成について、図9を参照しながら説明する。図9は、第二の実施形態に係る特定処理部100の機能構成の一例を示す図である。
以降では、牛の姿勢も考慮して、牛に発生した異常を特定する処理について、図10を参照しながら説明する。図10は、第二の実施形態に係る異常特定処理の一例を示すフローチャートである。なお、図10に示す処理は、例えば、10分間毎に繰り返し実行される。ただし、10分は一例であって、任意の時間毎に繰り返し実行されても良い。
10 特定装置
20 タグ
30 基準気圧センサ
100 特定処理部
101 取得部
102 前処理部
103 ノルム算出部
104 標準偏差算出部
105 指標値算出部
106 異常特定部
107 姿勢特定部
200 測定データ記憶部
300 基準気圧データ記憶部
Claims (6)
- 家畜の異常を特定する特定装置であって、
前記家畜に装着された加速度センサが測定した加速度データを記憶する記憶手段と、
所定の時間の間における1以上の加速度データを前記記憶手段から取得する第1の取得手段と、
前記第1の取得手段により取得された前記1以上の加速度データに基づいて、標準偏差を算出する第1の算出手段と、
前記第1の算出手段により算出された前記標準偏差から所定の指標値を算出する第2の算出手段と、
前記第2の算出手段により算出された前記指標値が、予め設定された所定の閾値を超えている場合、前記家畜に異常が発生したことを特定する第1の特定手段と、
を有することを特徴とする特定装置。 - 前記第2の算出手段は、
所定の時間の間における前記標準偏差と、予め設定された上限値及び下限値との大小関係に基づいて、前記指標値を算出する、ことを特徴とする請求項1に記載の特定装置。 - 前記上限値及び前記下限値の少なくとも一方は、前記家畜の異常の種別、又は、前記家畜毎の特性に応じて設定される、ことを特徴とする請求項2に記載の特定装置。
- 前記記憶手段には、前記家畜に装着された第1の気圧センサ及び所定の位置に設置された第2の気圧センサがそれぞれ測定した第1の気圧データ及び第2の気圧データが記憶され、
所定の時間の間における1以上の第1の気圧データ及び第2の気圧データを前記記憶手段から取得する第2の取得手段と、
前記第2の取得手段により取得された前記1以上の第1の気圧データ及び第2の気圧データから前記家畜の姿勢を特定する第2の特定手段とを有し、
前記第1の特定手段は、
前記第2の特定手段により前記家畜の姿勢が横臥であると特定された場合に、前記指標値が前記閾値を超えているか否かを判定する、ことを特徴とする請求項1乃至3の何れか一項に記載の特定装置。 - 家畜の異常を特定する特定装置であって、前記家畜に装着された加速度センサが測定した加速度データを記憶する記憶手段を有する特定装置が、
所定の時間の間における1以上の加速度データを前記記憶手段から取得する第1の取得手順と、
前記第1の取得手順により取得された前記1以上の加速度データに基づいて、標準偏差を算出する第1の算出手順と、
前記第1の算出手順により算出された前記標準偏差から所定の指標値を算出する第2の算出手順と、
前記第2の算出手順により算出された前記指標値が、予め設定された所定の閾値を超えている場合、前記家畜に異常が発生したことを特定する第1の特定手順と、
を実行することを特徴とする特定方法。 - コンピュータを、請求項1乃至4の何れか一項に記載の特定装置の各手段として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017231527A JP7037924B2 (ja) | 2017-12-01 | 2017-12-01 | 特定装置、特定方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017231527A JP7037924B2 (ja) | 2017-12-01 | 2017-12-01 | 特定装置、特定方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019097475A true JP2019097475A (ja) | 2019-06-24 |
| JP7037924B2 JP7037924B2 (ja) | 2022-03-17 |
Family
ID=66973394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017231527A Active JP7037924B2 (ja) | 2017-12-01 | 2017-12-01 | 特定装置、特定方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7037924B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019122368A (ja) * | 2018-01-12 | 2019-07-25 | デザミス株式会社 | 牛の健康状態管理システム及び管理方法並びに健康状態管理プログラム |
| CN116158374A (zh) * | 2022-12-07 | 2023-05-26 | 杭州慧牧科技有限公司 | 家禽智能养殖方法、装置、计算机设备及存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120274442A1 (en) * | 2009-11-02 | 2012-11-01 | Ecow Limited | Method and system for measuring the mobility of an animal |
| JP2013094316A (ja) * | 2011-10-31 | 2013-05-20 | Toshiba Corp | 歩行分析装置及び歩行分析プログラム |
| WO2016140332A1 (ja) * | 2015-03-05 | 2016-09-09 | 株式会社Nttドコモ | 監視装置及び動作検出方法 |
| JP2017060407A (ja) * | 2015-09-21 | 2017-03-30 | 株式会社グリーン&ライフ・イノベーション | 反芻動物の健康管理システムおよび反芻動物の健康管理方法 |
| JP2017201930A (ja) * | 2016-05-11 | 2017-11-16 | バイオシグナル株式会社 | 家畜の異常検知システム、及び異常検知装置 |
-
2017
- 2017-12-01 JP JP2017231527A patent/JP7037924B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120274442A1 (en) * | 2009-11-02 | 2012-11-01 | Ecow Limited | Method and system for measuring the mobility of an animal |
| JP2013094316A (ja) * | 2011-10-31 | 2013-05-20 | Toshiba Corp | 歩行分析装置及び歩行分析プログラム |
| WO2016140332A1 (ja) * | 2015-03-05 | 2016-09-09 | 株式会社Nttドコモ | 監視装置及び動作検出方法 |
| JP2017060407A (ja) * | 2015-09-21 | 2017-03-30 | 株式会社グリーン&ライフ・イノベーション | 反芻動物の健康管理システムおよび反芻動物の健康管理方法 |
| JP2017201930A (ja) * | 2016-05-11 | 2017-11-16 | バイオシグナル株式会社 | 家畜の異常検知システム、及び異常検知装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019122368A (ja) * | 2018-01-12 | 2019-07-25 | デザミス株式会社 | 牛の健康状態管理システム及び管理方法並びに健康状態管理プログラム |
| CN116158374A (zh) * | 2022-12-07 | 2023-05-26 | 杭州慧牧科技有限公司 | 家禽智能养殖方法、装置、计算机设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7037924B2 (ja) | 2022-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3468351B1 (en) | A livestock management system and method of operation | |
| US20240341282A1 (en) | Domesticated fowl health monitoring system and method | |
| CN115868947A (zh) | 一种奶牛健康预警系统和预警方法 | |
| JP6635968B2 (ja) | 行動特定装置、行動特定方法、及びプログラム | |
| JP2019097475A (ja) | 特定装置、特定方法、及びプログラム | |
| JP7204093B2 (ja) | 検知装置、検知方法及びプログラム | |
| EP3603388A1 (en) | Behavior specifying device, behavior specifying method and program | |
| JP7092624B2 (ja) | 行動特定装置、行動特定方法及びプログラム | |
| JP7410200B2 (ja) | 特定装置、特定方法、及びプログラム | |
| JP7376255B2 (ja) | 特定装置、特定方法及びプログラム | |
| JP6635995B2 (ja) | 行動特定装置、行動特定方法、及びプログラム | |
| JP7376254B2 (ja) | 特定装置、特定方法及びプログラム | |
| JP7089098B2 (ja) | 行動特定装置、行動特定方法、及びプログラム | |
| JP2025023246A (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| US9918454B2 (en) | Method of and device for generating an attention indication for a dairy animal | |
| EP4618749A1 (en) | Method for surveillance and analysis of farm animals and arrangements for such surveillance and analysis | |
| TWI784740B (zh) | 家禽健康監測系統及其方法 | |
| JP7088782B2 (ja) | 特定装置、特定方法及びプログラム | |
| JP2023072173A (ja) | 飲水状況特定装置、飲水状況特定プログラム及び記憶媒体 | |
| JP6636204B2 (ja) | 行動特定装置、行動特定方法、及びプログラム | |
| CN118370236B (zh) | 马匹的健康监控装置、设备及介质 | |
| WO2022181131A1 (ja) | 体重推定システム、及び、体重推定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200831 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210818 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210914 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20211110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220307 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7037924 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |