JP2019103608A - ロボット制御用医療器具、ドレープアダプタ及び手術支援システム - Google Patents
ロボット制御用医療器具、ドレープアダプタ及び手術支援システム Download PDFInfo
- Publication number
- JP2019103608A JP2019103608A JP2017237802A JP2017237802A JP2019103608A JP 2019103608 A JP2019103608 A JP 2019103608A JP 2017237802 A JP2017237802 A JP 2017237802A JP 2017237802 A JP2017237802 A JP 2017237802A JP 2019103608 A JP2019103608 A JP 2019103608A
- Authority
- JP
- Japan
- Prior art keywords
- adapter
- actuator unit
- drape
- power transmission
- robot control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Abstract
Description
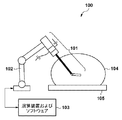
まず、図1を参照して、本実施形態に係る手術支援システム100について説明する。手術支援システム100は、ロボット制御用医療器具の一例としてのロボット医療器具101と、当該ロボット医療器具101の位置姿勢を制御するための医療器具駆動部102と、演算装置103とを含む。
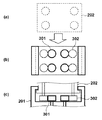
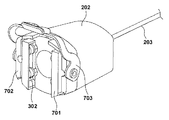
図2(a)は、本実施形態に係るロボット医療器具101を模式的に示している。ロボット医療器具101は大きく分けて、アクチュエータユニット201、駆動アダプタ202、術具シャフト203、エンドエフェクタ204、ドレープ205及びドレープアダプタ206を含む。エンドエフェクタ204等の駆動アダプタ202から先の部分は滅菌が可能な構造であり、ドレープ205とドレープアダプタ206とは製造時に滅菌されている。ドレープアダプタ206を装着すると、図2(b)に示すように、アクチュエータユニット201はドレープ205によって覆われるため、アクチュエータユニットへの飛散した血液等の付着や術者の手の接触を防止することができる。ドレープアダプタ206とアクチュエータユニット201、及び、ドレープアダプタ206と駆動アダプタ202は着脱可能である。アクチュエータユニット201で発生した動力は、カップリング機構207によって駆動アダプタ202側に伝達される。
次に、アクチュエータユニット201の動力をエンドエフェクタ204を制御する動力に変換する、駆動アダプタの内部構成について説明する。まず、図9を参照して、駆動アダプタ202の内部構成の概要について説明する。アクチュエータユニット201から伝達される動力は、それぞれの駆動軸901を通して駆動アダプタ202の内部に伝達される。駆動アダプタ202は、内部に、駆動軸901に固定された駆動歯車902と、術具シャフト203と同心状に配置された被駆動歯車903を有する。すなわち、駆動アダプタ側歯車302によって伝達された回転動力は、駆動軸901、駆動歯車902、被駆動歯車903の順に伝達され、術具シャフト203と同心状にある中空部材を回転させる。なお、各軸の駆動歯車902は、各被駆動歯車903に対応した位置に配置されており、全ての軸を独立して動かすことが可能である。図9では、視認性を考慮して2つの駆動歯車902のみを図示しているが、実際には本実施形態に係る駆動歯車902は駆動アダプタ内に4つ存在する。後述する図10においても同様である。
上述した駆動アダプタ202の構造により、エンドエフェクタ204につながる複数のパイプに独立した動力を伝達することが可能となった。次に、図13及び図14を参照して、この伝達された動力によってエンドエフェクタ204を動作させる機構について説明する。なお、以下の説明では、2つの回転運動と2つの直線運動によって、エンドエフェクタの3自由度の姿勢および把持機構の開閉を行う構成を例に説明する。
Claims (15)
- ロボットアームによって位置姿勢が制御されるロボット制御用医療器具であって、
直径の異なる同心状の複数の中空部材の回転又は進退により駆動されるエンドエフェクタと、
独立した複数の回転動力を発生させるアクチュエータユニットから前記複数の回転動力を受けて、前記複数の回転動力のそれぞれを、前記複数の中空部材を回転又は進退させることにより前記エンドエフェクタへ伝達する駆動アダプタと、を有し、
前記駆動アダプタは、前記アクチュエータユニットを覆うためのドレープを有するドレープアダプタを介在させて、前記アクチュエータユニットと着脱可能に接続するように構成される、ことを特徴とするロボット制御用医療器具。 - 前記駆動アダプタは、前記複数の中空部材のうちの第1の中空部材を前記複数の中空部材の中心軸方向に進退させるための第1の動力伝達部材と、前記複数の中空部材のうちの第2の中空部材を前記複数の中空部材の中心軸まわりに回転させる第2の動力伝達部材とを有する、ことを特徴とする請求項1に記載のロボット制御用医療器具。
- 前記駆動アダプタは、前記第1の中空部材と前記第2の中空部材との前記中心軸まわりの回転を一致させる係止部材を有する、ことを特徴とする請求項2に記載のロボット制御用医療器具。
- 前記第1の動力伝達部材と前記第2の動力伝達部材とは、物理的な中心軸を有しない、ことを特徴とする、請求項2又は3に記載のロボット制御用医療器具。
- 前記第1の動力伝達部材と前記第2の動力伝達部材とは、隣接する動力伝達部材に対して回転可能であるための所定の部材を前記隣接する動力伝達部材との間で挟み込んで、互いのラジアル方向の位置を拘束するように配置される、ことを特徴とする請求項2から4のいずれか1項に記載のロボット制御用医療器具。
- 前記所定の部材は球体であり、
前記第1の動力伝達部材と前記第2の動力伝達部材とは、隣接する動力伝達部材との間で前記球体を挟み込むための溝を有する、ことを特徴とする請求項5に記載のロボット制御用医療器具。 - 前記第1の動力伝達部材は、前記第1の動力伝達部材の回転に応じて、前記第1の中空部材を前記中心軸方向に進退させるねじ構造を含む、ことを特徴とする請求項2から6のいずれか1項に記載のロボット制御用医療器具。
- 前記駆動アダプタは、前記第1の動力伝達部材又は前記第2の動力伝達部材の、前記中心軸まわりの回転位置を検出するための検出部材を更に有する、ことを特徴とする請求項2から7のいずれか1項に記載のロボット制御用医療器具。
- 前記アクチュエータユニットから前記複数の回転動力を受ける前記駆動アダプタの動力伝達部材と、前記複数の回転動力を伝達する前記アクチュエータユニットの動力伝達部材とは、前記ドレープアダプタの筐体の内部空間において接触する、ことを特徴とする請求項1から8のいずれか1項に記載のロボット制御用医療器具。
- 前記エンドエフェクタは、前記複数の中空部材のいずれかの回転により前記エンドエフェクタの全体を前記複数の中空部材の中心軸まわりに回転させる第1の関節と、前記複数の中空部材のいずれかの進退により屈曲する第2の関節と、前記複数の中空部材のいずれかの回転により前記第2の関節より先にある手先部を前記複数の中空部材の中心軸まわりに回転させる第3の関節と、を有することを特徴とする請求項2から9のいずれか1項に記載のロボット制御用医療器具。
- 前記手先部は、把持機構を含み、前記把持機構は、前記複数の中空部材のいずれかの進退により開閉する、ことを特徴とする請求項10に記載のロボット制御用医療器具。
- ロボット制御用医療器具であって、直径の異なる同心状の複数の中空部材の回転又は進退により駆動されるエンドエフェクタと、独立した複数の回転動力を発生させるアクチュエータユニットから前記複数の回転動力を受けて、前記複数の回転動力のそれぞれを、前記複数の中空部材を回転又は進退させることにより前記エンドエフェクタへ伝達する駆動アダプタと、を含む、ロボットアームによって位置姿勢が制御されるロボット制御用医療器具に用いられるドレープアダプタであって、
前記アクチュエータユニットを覆うためのドレープを有し、
前記アクチュエータユニットと前記駆動アダプタの間に介在して、前記駆動アダプタと前記アクチュエータユニットとが、筐体の内部空間において着脱可能に接続するように構成される、ことを特徴とするドレープアダプタ。 - 前記ドレープアダプタは、前記駆動アダプタと接する面にカバーを有し、
前記カバーは、前記駆動アダプタの動力伝達部材を、前記ドレープアダプタの筐体の内部空間において前記アクチュエータユニットの動力伝達部材と接触させるための開口部を有する、ことを特徴とする請求項12に記載のドレープアダプタ。 - ロボット制御用医療器具と、前記ロボット制御用医療器具の位置姿勢を制御するためのロボットアームと、演算装置とを有する手術支援システムであって、
前記ロボット制御用医療器具は、
直径の異なる同心状の複数の中空部材の回転又は進退により駆動されるエンドエフェクタと、
独立した複数の回転動力を発生させるアクチュエータユニットと、
前記アクチュエータユニットから前記複数の回転動力を受けて、前記複数の回転動力のそれぞれを、前記複数の中空部材を回転又は進退させることにより前記エンドエフェクタへ伝達する駆動アダプタと、
前記アクチュエータユニットを覆うためのドレープを有し、且つ、前記アクチュエータユニットと前記駆動アダプタの間に介在して前記駆動アダプタを前記アクチュエータユニットと着脱可能に接続するように構成されるドレープアダプタと、を有し、
前記演算装置は、前記ロボット制御用医療器具の前記アクチュエータユニットによって発生される前記複数の回転動力を制御するように構成される、ことを特徴とする手術支援システム。 - 前記演算装置は、更に、前記ロボットアームを制御して、体腔内に挿入される前記ロボット制御用医療器具の挿入深さ及び挿入角度を制御するように構成される、ことを特徴とする請求項14に記載の手術支援システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017237802A JP6427253B1 (ja) | 2017-12-12 | 2017-12-12 | ロボット制御用医療器具、ドレープアダプタ及び手術支援システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017237802A JP6427253B1 (ja) | 2017-12-12 | 2017-12-12 | ロボット制御用医療器具、ドレープアダプタ及び手術支援システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6427253B1 JP6427253B1 (ja) | 2018-11-21 |
| JP2019103608A true JP2019103608A (ja) | 2019-06-27 |
Family
ID=64379186
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017237802A Active JP6427253B1 (ja) | 2017-12-12 | 2017-12-12 | ロボット制御用医療器具、ドレープアダプタ及び手術支援システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6427253B1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2609671A (en) * | 2021-08-12 | 2023-02-15 | Cmr Surgical Ltd | Surgical robot arm and instrument detachment |
| JP2024519317A (ja) * | 2021-05-04 | 2024-05-10 | マイクロシュア ベスローテン フェンノートシャップ | 外科手術用ロボットシステム並びにその用途及び部品 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022027324A (ja) * | 2020-07-31 | 2022-02-10 | ソニーグループ株式会社 | 医療用マニピュレータシステム並びにアダプタ装置 |
| WO2023181299A1 (ja) * | 2022-03-24 | 2023-09-28 | リバーフィールド株式会社 | 保持用装着具 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040049205A1 (en) * | 2002-09-09 | 2004-03-11 | Endo Via Medical, Inc. | Surgical instrument coupling mechanism |
| JP2016120277A (ja) * | 2014-11-27 | 2016-07-07 | アヴァテラメディカル ゲーエムベーハー | ロボット支援手術のための機器 |
| JP2016530004A (ja) * | 2013-08-15 | 2016-09-29 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 器具減菌アダプタ駆動構成 |
| JP2017527245A (ja) * | 2014-07-04 | 2017-09-14 | エイ・ビー・ビー ゴムテック ゲゼルシャフト ミット ベシュレンクテル ハフツングABB gomtec GmbH | 磁気式のインターフェースを備える駆動ユニット |
-
2017
- 2017-12-12 JP JP2017237802A patent/JP6427253B1/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040049205A1 (en) * | 2002-09-09 | 2004-03-11 | Endo Via Medical, Inc. | Surgical instrument coupling mechanism |
| JP2016530004A (ja) * | 2013-08-15 | 2016-09-29 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 器具減菌アダプタ駆動構成 |
| JP2017527245A (ja) * | 2014-07-04 | 2017-09-14 | エイ・ビー・ビー ゴムテック ゲゼルシャフト ミット ベシュレンクテル ハフツングABB gomtec GmbH | 磁気式のインターフェースを備える駆動ユニット |
| JP2016120277A (ja) * | 2014-11-27 | 2016-07-07 | アヴァテラメディカル ゲーエムベーハー | ロボット支援手術のための機器 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024519317A (ja) * | 2021-05-04 | 2024-05-10 | マイクロシュア ベスローテン フェンノートシャップ | 外科手術用ロボットシステム並びにその用途及び部品 |
| GB2609671A (en) * | 2021-08-12 | 2023-02-15 | Cmr Surgical Ltd | Surgical robot arm and instrument detachment |
| GB2609671B (en) * | 2021-08-12 | 2023-08-23 | Cmr Surgical Ltd | Surgical robot arm and instrument detachment |
| GB2617301A (en) * | 2021-08-12 | 2023-10-04 | Cmr Surgical Ltd | Surgical robot arm and instrument detachment |
| GB2617301B (en) * | 2021-08-12 | 2024-09-04 | Cmr Surgical Ltd | Surgical robot arm and instrument detachment |
| US12533197B2 (en) | 2021-08-12 | 2026-01-27 | Cmr Surgical Limited | Surgical robotic arm and instrument detachment |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6427253B1 (ja) | 2018-11-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111084661B (zh) | 手术辅助装置、以及记录介质 | |
| US12070282B2 (en) | Methods, systems, and devices relating to force control surgical systems | |
| Hong et al. | Design of a novel 4-DOF wrist-type surgical instrument with enhanced rigidity and dexterity | |
| US10667673B2 (en) | Handheld catheter driver with endoscope mount utilizing friction-driven wheel mechanism | |
| JP6427253B1 (ja) | ロボット制御用医療器具、ドレープアダプタ及び手術支援システム | |
| Fu et al. | The master-slave catheterisation system for positioning the steerable catheter | |
| CN113180836B (zh) | 输入装置、主操作设备及手术机器人 | |
| JP2012187311A (ja) | 医療用処置具およびマニピュレータ | |
| Yamashita et al. | Development of endoscopic forceps manipulator using multi-slider linkage mechanisms | |
| JP2020065910A (ja) | 手術支援装置 | |
| JP2020065904A (ja) | 手術支援装置 | |
| CN117442352A (zh) | 医疗器械盒、机器人超声刀及手术机器人 | |
| CN117100407A (zh) | 开合输入装置、旋转输入装置、力反馈主手及手术机器人 | |
| JP7136784B2 (ja) | ツールの使用を支援するための装置および方法 | |
| Wang et al. | A novel catheter operating system with force feedback for medical applications | |
| Guo et al. | Performance evaluation of the novel grasper for a robotic catheter navigation system | |
| Sayahkarajy et al. | Design of a mechatronic interface with compliant manipulator for robot assisted echocardiography | |
| CN117338443A (zh) | 医疗器械盒、机器人超声刀及手术机器人 | |
| Matsunaga et al. | Development of small‐diameter haptic flexible gripping forceps robot | |
| CN119837468B (zh) | 内窥镜接头、手术机器人及其对接传动方法 | |
| CN222110167U (zh) | 医疗器械盒、机器人超声刀及手术机器人 | |
| CN222110166U (zh) | 医疗器械盒、机器人超声刀及手术机器人 | |
| Eckl et al. | Comparison of manual steering and steering via joystick of a flexible rhino endoscope | |
| CN117357272A (zh) | 医疗器械盒、机器人超声刀及手术机器人 | |
| Nakamura et al. | Development of forceps manipulator system for laparoscopic surgery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171212 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20171212 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181001 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181026 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6427253 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |