JP2019104338A - 車載システム、及び、検出器ハブ - Google Patents
車載システム、及び、検出器ハブ Download PDFInfo
- Publication number
- JP2019104338A JP2019104338A JP2017237417A JP2017237417A JP2019104338A JP 2019104338 A JP2019104338 A JP 2019104338A JP 2017237417 A JP2017237417 A JP 2017237417A JP 2017237417 A JP2017237417 A JP 2017237417A JP 2019104338 A JP2019104338 A JP 2019104338A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- detector
- detectors
- control device
- network
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
- B60R16/0238—Electrical distribution centers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40169—Flexible bus arrangements
- H04L12/40176—Flexible bus arrangements involving redundancy
- H04L12/40189—Flexible bus arrangements involving redundancy by using a plurality of bus systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/66—Arrangements for connecting between networks having differing types of switching systems, e.g. gateways
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K7/00—Constructional details common to different types of electric apparatus
- H05K7/02—Arrangements of circuit components or wiring on supporting structure
- H05K7/026—Multiple connections subassemblies
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/87—Combinations of sonar systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R2201/00—Connectors or connections adapted for particular applications
- H01R2201/26—Connectors or connections adapted for particular applications for vehicles
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40267—Bus for use in transportation systems
- H04L2012/40273—Bus for use in transportation systems the transportation system being a vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Small-Scale Networks (AREA)
Abstract
Description
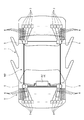
図1に示す本実施形態の車載システム1は、車両Vに搭載され、当該車両Vにおいて複数の検出器3を検出器ハブ5で集約した車載ネットワークシステムである。車載システム1は、図1に示す構成要素を車両Vに搭載することで実現される。以下、各図を参照して車載システム1の構成について詳細に説明する。
2 車載機器
3 検出器
4 制御装置
5 検出器ハブ
6 カールコード
51 検出器接続部
52 制御装置接続部
54b 通信処理部
54c 異常判定部
N1 第1ネットワーク
N2 第2ネットワーク
V 車両
Claims (6)
- 車両に設けられた複数の検出器と、
前記複数の検出器による検出結果を表す検出情報に基づいて前記車両に搭載された車載機器を制御する制御装置と、
前記複数の検出器と前記制御装置との間に相互に通信可能に介在し、前記複数の検出器による前記検出情報を集約して前記制御装置に送信する検出器ハブとを備えることを特徴とする、
車載システム。 - 前記車載機器と前記制御装置とを相互に通信可能に接続する第1ネットワークと、
前記第1ネットワークから独立したネットワークであって前記複数の検出器と前記検出器ハブと前記制御装置とを相互に通信可能に接続する第2ネットワークとを備える、
請求項1に記載の車載システム。 - 前記検出器ハブは、複数設けられ、それぞれ相互に異なる前記複数の検出器による前記検出情報を集約し、
前記第2ネットワークは、前記複数の検出器ハブを相互に通信可能に接続したリング状のネットワークを構成する、
請求項2に記載の車載システム。 - 前記検出器ハブは、前記検出器の異常を判定する異常判定部を有する、
請求項1乃至請求項3のいずれか1項に記載の車載システム。 - 前記検出器ハブと前記検出器とを接続するカールコードを備える、
請求項1乃至請求項4のいずれか1項に記載の車載システム。 - 車両に設けられた複数の検出器と相互に通信可能に接続される検出器接続部と、
前記複数の検出器による検出結果を表す検出情報に基づいて前記車両に搭載された車載機器を制御する制御装置と相互に通信可能に接続される制御装置接続部と、
前記複数の検出器による前記検出情報を集約して前記制御装置に送信する通信処理部とを備えることを特徴とする、
検出器ハブ。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017237417A JP7076997B2 (ja) | 2017-12-12 | 2017-12-12 | 車載システム、及び、検出器ハブ |
| CN201880074590.9A CN111372820B (zh) | 2017-12-12 | 2018-11-08 | 车载系统以及检测器集线器 |
| PCT/JP2018/041513 WO2019116793A1 (ja) | 2017-12-12 | 2018-11-08 | 車載システム、及び、検出器ハブ |
| EP18888162.7A EP3725596B1 (en) | 2017-12-12 | 2018-11-08 | Vehicle-mounted system and detector hub |
| US16/874,685 US11027678B2 (en) | 2017-12-12 | 2020-05-15 | On-board system and detector hub |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017237417A JP7076997B2 (ja) | 2017-12-12 | 2017-12-12 | 車載システム、及び、検出器ハブ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019104338A true JP2019104338A (ja) | 2019-06-27 |
| JP2019104338A5 JP2019104338A5 (ja) | 2020-03-05 |
| JP7076997B2 JP7076997B2 (ja) | 2022-05-30 |
Family
ID=66819235
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017237417A Active JP7076997B2 (ja) | 2017-12-12 | 2017-12-12 | 車載システム、及び、検出器ハブ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11027678B2 (ja) |
| EP (1) | EP3725596B1 (ja) |
| JP (1) | JP7076997B2 (ja) |
| CN (1) | CN111372820B (ja) |
| WO (1) | WO2019116793A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3787236A1 (en) * | 2019-08-30 | 2021-03-03 | Toyota Jidosha Kabushiki Kaisha | In-vehicle network system |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN209375770U (zh) * | 2018-01-25 | 2019-09-10 | 台湾东电化股份有限公司 | 光学系统 |
| US11597104B2 (en) | 2019-07-31 | 2023-03-07 | X Development Llc | Mobile robot sensor configuration |
| WO2021115609A1 (en) * | 2019-12-12 | 2021-06-17 | Ejzenberg Geoffrey | A situational awareness system of a cyber-physical hybrid electric autonomous or semi-autonomous off-highway dump truck for surface mining industry |
| KR20210120287A (ko) * | 2020-03-26 | 2021-10-07 | 현대자동차주식회사 | 진단 시스템 및 차량 |
| DE102020204043B4 (de) | 2020-03-27 | 2023-05-04 | Zf Friedrichshafen Ag | Bordnetz mit einem Prozessorverbund für ein Fahrzeug |
| DE102021205912B4 (de) | 2021-06-10 | 2024-08-01 | Zf Friedrichshafen Ag | Fahrzeugsystem zur Generierung von Betriebsparametern und Verfahren |
| CN116774229B (zh) * | 2023-06-21 | 2026-03-24 | 中国第一汽车股份有限公司 | 目标检测系统与方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63173746A (ja) * | 1987-01-12 | 1988-07-18 | Furukawa Electric Co Ltd:The | 車両用多重伝送システム |
| JP2006240603A (ja) * | 2005-03-07 | 2006-09-14 | Fujikura Ltd | 車両用スライドドアの給電装置 |
| JP2007336267A (ja) * | 2006-06-15 | 2007-12-27 | Toyota Motor Corp | 車載通信システム |
| WO2011074401A1 (ja) * | 2009-12-15 | 2011-06-23 | 株式会社オートネットワーク技術研究所 | 通信システム、中継装置及びワイヤハーネス |
| JP2014129074A (ja) * | 2012-12-28 | 2014-07-10 | Fujitsu Ten Ltd | 車両情報記憶処理装置および車両情報記憶処理方法 |
| JP2016220055A (ja) * | 2015-05-21 | 2016-12-22 | 矢崎総業株式会社 | ネットワークシステム |
| JP2017199299A (ja) * | 2016-04-28 | 2017-11-02 | 株式会社デンソー | 情報処理装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7999408B2 (en) * | 2003-05-16 | 2011-08-16 | Continental Automotive Systems, Inc. | Power and communication architecture for a vehicle |
| CN102958756B (zh) * | 2011-04-22 | 2016-07-06 | 松下知识产权经营株式会社 | 车辆用输入装置及车辆用输入方法 |
| US9082239B2 (en) * | 2012-03-14 | 2015-07-14 | Flextronics Ap, Llc | Intelligent vehicle for assisting vehicle occupants |
| JP5729337B2 (ja) * | 2012-03-21 | 2015-06-03 | 株式会社デンソー | 車両用認証装置、及び車両用認証システム |
| JP6362875B2 (ja) | 2014-02-27 | 2018-07-25 | クラリオン株式会社 | 車載装置、車載情報システム |
| JP2016124455A (ja) * | 2015-01-06 | 2016-07-11 | 株式会社オートネットワーク技術研究所 | 車載中継装置及び中継方法 |
| CA2975400A1 (en) * | 2015-01-30 | 2016-08-04 | Embertec Pty Ltd | Sensor hub with power manager |
| JP6417984B2 (ja) * | 2015-02-02 | 2018-11-07 | トヨタ自動車株式会社 | 車載通信システム |
| EP3883194B1 (en) * | 2016-05-24 | 2023-02-15 | Toshiba Information Systems (Japan) Corporation | Vehicle-mounted gateway apparatus and vehicle-mounted gateway system |
| CN111201554B (zh) * | 2017-10-17 | 2022-04-08 | 本田技研工业株式会社 | 行驶模型生成系统、行驶模型生成系统中的车辆、处理方法以及存储介质 |
| JP7398210B2 (ja) * | 2019-06-14 | 2023-12-14 | 矢崎総業株式会社 | 電気接続箱 |
-
2017
- 2017-12-12 JP JP2017237417A patent/JP7076997B2/ja active Active
-
2018
- 2018-11-08 CN CN201880074590.9A patent/CN111372820B/zh active Active
- 2018-11-08 WO PCT/JP2018/041513 patent/WO2019116793A1/ja not_active Ceased
- 2018-11-08 EP EP18888162.7A patent/EP3725596B1/en active Active
-
2020
- 2020-05-15 US US16/874,685 patent/US11027678B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63173746A (ja) * | 1987-01-12 | 1988-07-18 | Furukawa Electric Co Ltd:The | 車両用多重伝送システム |
| JP2006240603A (ja) * | 2005-03-07 | 2006-09-14 | Fujikura Ltd | 車両用スライドドアの給電装置 |
| JP2007336267A (ja) * | 2006-06-15 | 2007-12-27 | Toyota Motor Corp | 車載通信システム |
| WO2011074401A1 (ja) * | 2009-12-15 | 2011-06-23 | 株式会社オートネットワーク技術研究所 | 通信システム、中継装置及びワイヤハーネス |
| JP2014129074A (ja) * | 2012-12-28 | 2014-07-10 | Fujitsu Ten Ltd | 車両情報記憶処理装置および車両情報記憶処理方法 |
| JP2016220055A (ja) * | 2015-05-21 | 2016-12-22 | 矢崎総業株式会社 | ネットワークシステム |
| JP2017199299A (ja) * | 2016-04-28 | 2017-11-02 | 株式会社デンソー | 情報処理装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3787236A1 (en) * | 2019-08-30 | 2021-03-03 | Toyota Jidosha Kabushiki Kaisha | In-vehicle network system |
| JP2021036643A (ja) * | 2019-08-30 | 2021-03-04 | トヨタ自動車株式会社 | 車載ネットワークシステム |
| CN112449321A (zh) * | 2019-08-30 | 2021-03-05 | 丰田自动车株式会社 | 车载网络系统 |
| JP7252097B2 (ja) | 2019-08-30 | 2023-04-04 | トヨタ自動車株式会社 | 車載ネットワークシステム |
| US11622250B2 (en) | 2019-08-30 | 2023-04-04 | Toyota Jidosha Kabushiki Kaisha | In-vehicle network system |
| CN112449321B (zh) * | 2019-08-30 | 2024-12-03 | 丰田自动车株式会社 | 车载网络系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111372820A (zh) | 2020-07-03 |
| US20200269782A1 (en) | 2020-08-27 |
| EP3725596A4 (en) | 2021-08-04 |
| EP3725596A1 (en) | 2020-10-21 |
| JP7076997B2 (ja) | 2022-05-30 |
| EP3725596B1 (en) | 2022-03-02 |
| WO2019116793A1 (ja) | 2019-06-20 |
| US11027678B2 (en) | 2021-06-08 |
| CN111372820B (zh) | 2022-12-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7076997B2 (ja) | 車載システム、及び、検出器ハブ | |
| JP6938353B2 (ja) | 車載システム | |
| US10185329B2 (en) | Methods and systems for vehicle-to-vehicle communication | |
| JP6515911B2 (ja) | 車載ネットワークシステム | |
| CN113103956B (zh) | 360度挂车摄像机视图系统 | |
| WO2019067285A1 (en) | DOUBLE NETWORK FOR TROUBLESHOOTING | |
| JP2017124700A (ja) | 車両システム及び車両モジュール | |
| CN114954306A (zh) | 一种商用车的模块化电子电气架构 | |
| WO2018230132A1 (ja) | 分配器及び車載システム | |
| CN112937597A (zh) | 具有不同通信架构及多个网关模块的车辆 | |
| US11254214B2 (en) | Vehicle and method of controlling the same | |
| CA2951778A1 (en) | Remote function control system with wireless databus device and associated wireless security sensor for a vehicle having a data communications bus and related methods | |
| US10333207B2 (en) | Vehicle and control method of controlling the same | |
| CA2951679A1 (en) | Remote function control system with remote function device and associated wireless security sensor for a vehicle having a data communications bus and related methods | |
| CN115427265B (zh) | 车载网络系统及电子控制装置 | |
| CN106502240A (zh) | 一种车车联网的车身控制系统 | |
| JP7471758B2 (ja) | 車両用通信システム | |
| JP5406079B2 (ja) | 車載通信システム | |
| WO2021131699A1 (ja) | 車載中継装置 | |
| CN120245891A (zh) | 车辆的电气系统、数据通信方法及车辆 | |
| JP2022128834A (ja) | 車載ネットワークシステム | |
| CN113815547A (zh) | 车辆控制系统、设备及车辆 | |
| Mischo et al. | Aotomotive networking | |
| CN106004718A (zh) | 一种can车载总线网络系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200122 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220518 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7076997 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |